
SOME SPECIAL HEURISTICS
FOR DISCRETE OPTIMIZATION PROBLEMS
Boris Melnikov
1
, Alexey Radionov
Department of Mathematics and Information Science,Togliatti State Univ., Belorusskaya str., 14, Togliatti, 445667, Russia
Viktor Gumayunov
Department of Telecommunication Software,Ulyanovsk State Univ., L.Tolstoy str., 42, Ulyanovsk,432700, Russia
Keywords: Anytime algorithm, discrete optimization problem, local heuristics, minimization, nondeterministic
finite automata, disjunctive normal forms
.
Abstract: In previous paper we considered some heuristic methods of decision-making for various discrete
optimization problems; all these heuristics should be considered as the combination of them and form a
common multi-heuristic approach to the various problems. And in this paper, we begin to consider local
heuristics, which are different for different problems. At first, we consider two problems of minimization:
for nondeterministic finite automata and for disjunctive normal forms.
Our approach can be considered
as an alternative to the methods of linear programming, multi-agent optimization, and neuronets.
1 INTRODUCTION
In previous papers (see (Melnikov, 2005), and also
some papers in Russian) we considered some
heuristic methods of decision-making for various
discrete optimization problems (DOP). In fact, all
these heuristics should be considered as the
combination of them and form a common multi-
heuristic approach to the various DOP. And in this
paper, we consider not the common heuristics
(which can be applied to various DOP), but so called
local heuristics, which are own for different
problems. Let us remark, that in (Melnikov, 2005)
we already considered also some local heuristics (for
a problem of considered in this paper, i.e., for
minimization of automata).
But at first, let us briefly describe the common
set of heuristics of (Melnikov, 2005). The object of
each of considered problems is programming
anytime algorithms.
• We use some modifications of truncated branch-
and-bound method (B&B).
• For the selecting immediate step, we apply
dynamic risk functions.
• Simultaneously, for the selection of coefficients
of the averaging-out, we use genetic algorithms.
• And the reductive self-learning by the same
genetic methods is used for the start of truncated
B&B.
Thus, this combination of heuristics represents a
special approach to construction of anytime-
algorithms for the discrete optimization problems,
which is an alternative to the methods of linear
programming, multi-agent optimization, and
neuronets.
2 CONSIDERED PROBLEMS
Thus, as we said before, the main object of this
paper is local heuristics, and each of them belongs to
its own area. Therefore let us describe considered
DOP.
At first, we consider some connected problems
of minimization for nondeterministic finite Rabin-
Scott automata (NFA). Probably, the main for them
is state-minimization, i.e., the problem of
constructing NFA, which defines the given regular
language and has minimum possible number of
1
Author was partially supported by the Russia
n
Foundation of the Basic Research (project No.04-01-
00863).
360
Melnikov B., Radionov A. and Gumayunov V. (2006).
SOME SPECIAL HEURISTICS FOR DISCRETE OPTIMIZATION PROBLEMS.
In Proceedings of the Eighth International Conference on Enterpr ise Information Systems - AIDSS, pages 360-364
DOI: 10.5220/0002469803600364
Copyright
c
SciTePress

states. Since (Kameda and Weiner, 1970), there are a
few changes in description of the exact algorithms
for this problem: all the algorithms are exponential
relative to the number of states of considered NFA.
The last argument is true because all the algorithms
need to construct equivalent automaton of canonical
form (or, maybe, some similar graphs or other
objects). Let us remark, that from the point of view
of the theory of complexity of algorithms, all the
published algorithms (Kameda and Weiner, 1970;
Jiang and Ravikumar, 1993; Melnikov, 2000; etc.)
are equivalent. However we hope, that the approach
of authors of this paper (Melnikov, 2000) allows
formulating some heuristics for anytime algorithms.
Second, it is the problem of minimization of
disjunctive normal forms (DNF). The exact
algorithms for this minimization are obtained for
ages (and are considered in the classical textbooks,
for example, in the Russian textbook for first-year
students (Yablonskiy, 1979), which is used more
than 25 years), however the computer programs
making on basis of such solutions cannot work in
real time even for the number of variables, which is
equal to 20, except, certainly, for a lot of trivial
cases. The author does not know books, where any
anytime algorithms for this problem are obtained,
however, if such papers do exist, the approach of
this paper, certainly, can be used in some alternative
versions of computer programs.
In this paper, we shall consider local heuristics
for two the described problems. However, let us
briefly describe the two other problems, for which
we are going to publish local heuristics in the next
papers.
Thus, the third problem is the classical travelling
salesman problem (TSP; see (Hromkovič, 2003),
etc.); certainly, universal methods for solving TSP
simply cannot exist. Some last years, authors of
papers for heuristic methods of TSP-solution
consider most often so called metric TSP. For their
solving, some methods of linear programming and
multi-agent optimization are used; (Hromkovič,
2003; Dorigo and Gambardella, 1997; Johnson and
McGeoch, 1997; etc). However, some variants of the
classical B&B can also be used not only for the
exact (optimal) solution of considered TSP, but also
for quasi-optimal heuristic solutions. At first, such
approach can be used for the quasi-metric TSP
(Melnikov and Romanov, 2001).
And the fourth problem is the special problem
for graph transformation algorithms. Considering
weighted oriented graphs, we formulate some
special rules for combining their vertices. And the
goal is to obtain graph having minimum possible
number of edges. For details, see (Belozyorova and
Melnikov, 2005) and the references from that paper.
3 SOME LOCAL HEURISTICS
FOR THE NFA-MINIMIZATION
PROBLEM
In this Section, we consider a heuristic algorithm for
forming quasi-optimum covering; let it be Q defined
in (Melnikov, 2000). For this thing, we shall select a
subset of blocks (grids) of a matrix, which cells are
corresponding to elements of special binary relation
#, and this relation can be construct on the base of
the given NFA. (See details also in (Melnikov,
2000).)
The considered algorithm is based on a special
modification of truncated B&B. It differs from the
classical truncated B&B that we do not divide the
considered problem (and, therefore, the searching
space) into the left and right ones. The whole
searching space corresponds to the whole set of
blocks, but for the first step, it is only the considered
matrix of binary relation #.
But the practical programming for the classical
truncated B&B gave the poor results. The main
obstacle is that we hardly can fixed the fact that the
considered block does not belong to the anytime
solution. Besides, we can estimate only the cells, not
the blocks (see such heuristics in (Melnikov, 2005)).
And procedure of constructing blocks is the
particular heuristic sub-problem; we are going to
describe corresponding algorithms in the next paper.
Therefore, we have to use the following
modification of the truncated B&B.
1. Considering the next problem of the
searching space, we select a cell using the
heuristics A (see below).
2. Using the heuristics B (see below), we
construct the set of blocks M. Each of
these blocks contains the selected cell. Let
the number of blocks given by algorithm
B be N.
3. The considered problem is divided into N
ones. In each of obtained problem, we
suppose that the next considered block
belongs to Q, and other N-1 blocks do not
belong to Q.
4. Returning to the step 1. (Or exiting, if the
searching space is empty.) ■
This heuristic algorithm is based on the
following example. Let us have the considered
problem T, and after the heuristics A and B (see
below), we obtain a set of blocks (let they be b1, b2
and b3) for the next branching. Then we divide the
problem T for 3 ones (T1, T2 and T3, branching by
b1, b2 and b3 correspondingly). And we use the fact
that b1 could hardly be included in the set of blocks
solving the problems T2 and T3, etc.
SOME SPECIAL HEURISTICS FOR DISCRETE OPTIMIZATION PROBLEMS
361

Heuristics A (selecting the cell). We select the
cell having the maximum possible sum of the
numbers of cells in the same row or in the same
column, which are not included in the current
answer. (Remark that in (Melnikov, 2005), we
considered some more complicated heuristics for
this thing.) ■
Heuristics B (selecting the block). Let us choose
the set of blocks containing the cell of the row r and
the column c.
1. First, let us construct the following quasi-
block.
a) Excluding columns, which have 0
in the position r. In the same way,
we also exclude rows.
b) Using algorithm A (or its
modification of (Melnikov, 2005))
for estimating remaining columns
and rows, such that the estimation
is the sum of their values given by
algorithm A. Certainly, we
consider only cells, which values
are equal to 1.
c) Proving that there exist two
columns or two rows, which have
the different estimations.
(Otherwise, we already obtained
the quasi-block, i.e., all the
corresponding cells have values 1.
In this case, we add this quasi-
block to the set of them and return
to step b.)
d) Excluding the row or the column
having the minimum estimation.
e) Returning to the step b.
2. For each constructed quasi-block, let us
extend the number of rows and/or
columns, such that all the corresponding
values are equal to 1. Thus, we can obtain
1 or 2 blocks.
3. All the blocks constructed of the step 2
form the final set of blocks. ■
Certainly, for the successful execution, B&B
needs not only heuristics for branching (i.e.,
heuristics A and B described before), but also some
more heuristics:
• for calculating the bounds (C1 and C2);
• for the quick addition for the set of blocks (D);
• and for quick transformating the quasi-block
into the block (E).
Let us remark in advance, that we do not describe
heuristics E in this paper, and heuristics C2 will be
described briefly. Their detailed description, and
also the detailed description of some complicated
heuristics which are the alternative to the simplest
heuristics C1 given below, is the subject of the next
paper.
Heuristics C1 (calculating upper bound). The
upper bound is the maximum possible value of
blocks, which are obtained for the ending of
calculating the considered problem.
We count the number of rows which contain at
least one value 1; also we count the number of such
columns. The answer is the minimum of two these
values. ■
Heuristics C2 (calculating lower bound).
Similarly to C1, the lower bound is the minimum
possible value of blocks, which are obtained for the
ending of calculating the considered problem.
For calculating this value, we use another
heuristics for constructing special set of cells, for
which each their pair cannot belong to the same
block. (Let us remark, that there exist, in general,
more than 1 such sets of cells, but the mentioned
heuristics constructs the only one.s) The number of
such cells is the lower bound. ■
Certainly, the solved subproblem can be called
unpromising if its lower bound is equal or more than
minimum of the upper bounds of all the existing
subproblems. Such subproblem can be excluded
from the set of subproblems to be considered.
Heuristics D (the quick addition for the set of
blocks). Two of the possible goals of applying this
heuristics are the following: to make the upper
bound; to make a sequence of the left problems (for
the last thing, see (Melnikov, 2005)).
Thus, the simplest heuristics is the same as
heuristics C1. ■
4 SOME LOCAL HEURISTICS
FOR THE DNF-MINIMIZATION
PROBLEM
Instead of blocks, we consider here the planes; each
plane has dimension in the interval from 1 to the
given number of variables N. At first sight, we have
to construct all the planes, for which all the values of
minimized function are equal to 1. (After this
constructing, B&B can start.) However, all the well-
known algorithms for constructing such planes are
too long (Birkhoff and Bartee, 1999; Lee and
Markus, 1967; Yablonskiy, 1979; etc) – unlike the
NFA-minimization problem.
Really, if we use algorithms which obtain planes
in decreasing order of their dimension, then we
obtain that the time is O(4
N
). Let we have N
variables and M sets of their values (corresponding
to the sets of coordinates), where the minimized
function is equal to 1. Then infilling the array
corresponding planes (the number of planes is 3
N
)
ICEIS 2006 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
362
requires O(M
•2
N
) units of time. Because at the worst
M =2
N-1
, we obtain that the required time is O(4
N
).
Certainly, we exclude the planes belonging to
other ones. The operation of such excluding require
the time, which only linearly depends on N. But
such procedure does not solve formulating problem
completely.
Besides, if we use algorithms which obtain
planes in decreasing order of their dimension, then
the appearance of the first plane usually needs a lot
of time; but it is a practical result, it hardly could be
rigorously proven.
The algorithms which obtain planes in ascending
order of their dimension also do not solve the
problem, although the time estimating is here O(3
N
);
this estimating is simply obtained, e.g., by
realization algorithms of (Birkhoff and Bartee, 1999;
Yablonskiy, 1979). This time estimating is some
better, but also too long. However, the immediate
start of B&B is here uninteresting, because there is
unlikely that even the pseudo-optimal answer
(pseudo-optimal DNF) contains planes having little
dimensions.
However, the heuristics for the immediate start
of B&B does exist. The detailed description of this
heutristics is the subject of the special paper, we
shall describe it briefly.
Thus, we set for this thing the following local
goal: to construct the sets of considered subsets of
the given planes, which intersections are minimum
possible. The bound is here the power of intersection
sets. And the indication of anytime decision is the
absence of the sets of coordinates, for which the
value of the given function is equal to 1.
Then we select an arbitrary value 1 from the
given set of multidimensional cube corner. For it, we
construct the plane containing it and having
maximum possible dimension. (Such algorithm of
constructing plane is similar to considered in Section
3 for the selecting block.) Certainly, we can obtain
more than one planes. Then for each of these planes,
we exclude then sets of coordinates belonging to this
plane. It is important to remark, that each of them
will form the different sub-problem, and, therefore,
we can start truncated B&B before we have
constructed the whole set of planes. Besides, such
algorithm allow to obtain planes of big dimension,
e.g., we often do not consider intersections of them.
We use here the following estimation for the
bounds. The high bound is the number of planes in
the quasi-optimum DNF (i.e., of the best DNF of the
considered sub-problem). And the low bound is the
same value for the considered DNF.
And, as we said before, the heuristics for
minimization of DNF (unlike minimization of NFA)
are given here very briefly. We are going to describe
this thing more detailed in the next paperз.
5 SOME PRELIMINARY
PRACTICAL RESULTS
While testing, we set the time for our anytime
algorithm (see the tables). We also set the dimension
of the problem – i.e., the number of rows for NFA
(the number of columns depends of the last value
also by special variate) and the number of variables
for DNF – not the numbers of grids for NFA and
planes for DNF, the last values are also special
variates depending on previous ones.
The clock speed of the computer was about 2.0
GHz. If we choose the time under 10 minutes, we
make the averaging-out by 50 or more solutions.
And the values of cells have the following
meaning. For each cell, we made corresponding
tests. For each test, we set the number of
grids/planes for the given problem (certainly, we did
not use this information in the program) and obtain
the value of grids/planes found by anytime
algorithm. Then we counted comparative
improvement of this value (+) or the worsening (–).
The possibility of positive values is the corollary of
the fact, that, e.g. for the DNF, two planes of
dimension k could form one plane of dimension k+1.
The values were averaged; they are written in the
table in percents. (I.e., +0.20 means that the mean
value is better than the a priori given than 0.2%.)
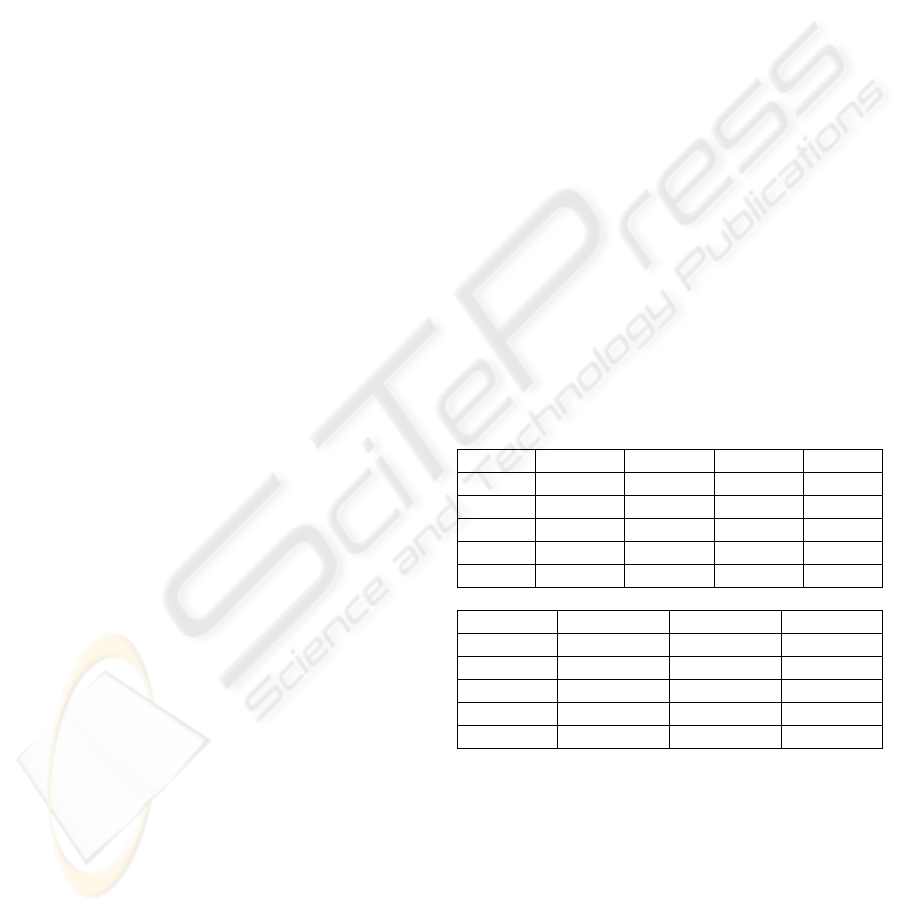
Thus, below are the practical results.
NFA 20–23 40–45 60–65 80–90
01 sec –1.76 –0.58 –0.02 –0.02
10 sec –0.55 –0.17 +0.22 +0.20
01 min –0.03 +0.45 +1.00 +1.06
10 min 0 +1.06 +1.07 +1.20
01 h 0 +1.07 +1.17 +1.21
DNF 20–22 25–27 30–33
01 sec –8.5 –2.2 –1.9
10 sec –1.21 –0.70 –0.43
01 min –0.73 –0.65 –0.43
10 min –0.03 –0.01 –0.01
01 h –0.03 –0.01 0
Thus, the obtained results are near to 100%; this
fact shows that the approach proposed in this paper
could be applied in the future. And in the next
papers, we are going to give the practical results for
two other problems mentioned in Section 2.
REFERENCES
Belozyorova, A., and Melnikov, B., 2005. “Applying the
set of heuristics in the problem of constructing scheme
of nuclear transformations”, 2nd Conference
SOME SPECIAL HEURISTICS FOR DISCRETE OPTIMIZATION PROBLEMS
363

“Methods and instrument of the information
processing”, Russia, Moscow State Univ. Ed. (2005)
208–212 (in Russian).
Birkhoff, G., and Bartee, T., 1999. Modern Applied
Algebra, McGraw-Hill, N.Y., 1999.
Dorigo, M., and Gambardella, L., 1997. “Ant Colony
System: A Cooperative Learning Approach to the
Traveling Salesman Problem”, IEEE Transactions on
Evolutionary Computation, Vo.1, No.1 (1997) 53–66.
Hromkovič, J., 2003. Algorithms for Hard Problems,
Springer, 2003.
Jiang, T., and Ravikumar, B., 1993. “Minimal NFA
Problems are Hard”, SIAM J. Comput., Vo.22 (1993).
Johnson, D., and McGeoch, L., 1997. “The Traveling
Salesman Problem: A Case Study in Local
Optimization”, in “Local Search in Combinatorial
Optimization”, eds E.Aarts, J.Lenstra, John Wiley Ed.,
1997, 215–310.
Kameda, T., and Weiner, P., 1970. “On the State
Minimization of Nondeterministic Finite Automata”,
IEEE Trans.on Computers, C-19 (1970) 617–627.
Lee, E., and Markus, L., 1967. Foundation of Optimal
Control Theory. Wiley, 1967.
Melnikov, B., 2000. “Once more about the state-
minimization of the nondeterministic finite automata”,
The Korean Journal of Computational and Applied
Mathematics, Vo.7, No.3 (2000) 655–662.
Melnikov B., and Romanov, N., 2001. “Once more on the
heuristics for the traveling salesman problem”, Russia,
Saratov State Univ. Ed., “Theoretical informatics and
its applying”, Vo.4 (2001) 81–92 (in Russian).
Melnikov, B., 2005. “Discrete Optimization Problems –
Some New Heuristic Approaches”, Conference HPC-
Asia-2005, IEEE Computer Society Press Ed., 2005.
Yablonskiy, S., 1979. Introduction into discrete
mathematics, Moscow, Nauka Ed., 1979 (in Russian).
ICEIS 2006 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
364
