
A HYPER-HEURISTIC FOR SCHEDULING INDEPENDENT JOBS
IN COMPUTATIONAL GRIDS
Juan Antonio Gonzalez, Maria Serna and Fatos Xhafa
Departament de Llenguatges i Sistemes Informtics
Universitat Politcnica de Catalunya
Campus Nord, Ed. Omega, C/Jordi Girona 1-3
08034, Barcelona, Spain
Keywords:
Scheduling, Grid Computing, Heuristic methods, Immediate mode, Batch mode.
Abstract:
In this paper we present the design and implementation of an hyper-heuristic for efficiently scheduling in-
dependent jobs in Computational Grids. An efficient scheduling of jobs to Grid resources depends on many
parameters, among others, the characteristics of the Grid infrastructure and job characteristics (such as com-
puting capacity, consistency of computing, etc.). Existing ad hoc scheduling methods (batch and immediate
mode) have shown their efficacy for certain types of Grids and job characteristics. However, as stand alone
methods, they are not able to produce the best planning of jobs to resources for different types of Grid resources
and job characteristics.
In this work we have designed and implemented a hyper-heuristic that uses a set of ad hoc (immediate and
batch mode) scheduling methods to provide the scheduling of jobs to Grid nodes according to the Grid and job
characteristics. The hyper-heuristic is a high level algorithm, which examines the state and characteristics of
the Grid system (jobs and resources), and selects and applies the ad hoc method that yields the best planning
of jobs to Grid resources. The resulting hyper-heuristic based scheduler can be thus used to develop network-
aware applications that need efficient planning of jobs to resources.
The Hyper-heuristic has been tested and evaluated in a dynamic setting through a prototype of a Grid simulator.
The experimental evaluation showed the usefulness of the hyper-heuristic in planning of jobs to resources as
opposed to planning without knowledge of the Grid and jobs characteristics.
1 INTRODUCTION
The Computational Grid (CG) has emerged as a new
paradigm for large scale distributed applications (Fos-
ter and Kesselman, 1998; Foster et al., 2001). A
CG logically unifies in a single computational unit
geographically distributed and highly heterogeneous
resources, which are interconnected through hetero-
geneous networks. The CG can thus be viewed as
a “type of parallel and distributed system that en-
ables the sharing, selection, and aggregation of geo-
graphically distributed autonomous resources dynam-
ically depending on their availability, capability, per-
formance, cost, and users’ QoS requirements” (Foster
and Kesselman, 1998). As a matter of fact, the par-
allel and distributed nature of CGs was the first ex-
ploited feature for solving combinatorial optimization
problems that are computationally hard (Casanova
and Dongarra, 1998; Wright, 2001; Linderoth and
Wright, 2003). More generally, during the last years,
Grid computing has motivated the development of
large scale applications that need the large computing
capacity offered by the Grid. Many Grid-enabled ap-
plication as well as many Grid-based infrastructures
are being reported in the Grid computing domain.
In order to achieve the Grid as a single computa-
tional unit many complex issues are nowadays being
investigated. One key issue is to efficiently benefit
from the parallel nature of Grid systems. The large
computing capacity offered by Grids not necessar-
ily yields to high performance applications. Indeed,
efficient techniques that allocate jobs/applications to
Grid resources are necessary. The resource allocation
problem is known to be computationally hard (Garey
and Johnson, 1979). Although the scheduling prob-
lems are among most studied problems in combinato-
128
Antonio Gonzalez J., Serna M. and Xhafa F. (2007).
A HYPER-HEURISTIC FOR SCHEDULING INDEPENDENT JOBS IN COMPUTATIONAL GRIDS.
In Proceedings of the Second International Conference on Software and Data Technologies - PL/DPS/KE/WsMUSE, pages 128-135
DOI: 10.5220/0001328701280135
Copyright
c
SciTePress

rial optimization, the heterogenous and dynamic char-
acteristics of Grids makes the problem very complex
for Grid environments. For instance, a Grid can con-
nect PCs, LANs and Supercomputers and jobs of very
different workload can arrive in the Grid. Moreover,
job scheduling in Grids is a large scale optimization
problem due to the large number of jobs that could ar-
rive in the Grid and of the large number of Grid nodes
that could potentially participate in the planning of
jobs. Therefore, although useful, the techniques used
in traditional scheduling may fail to produce efficient
planning in Grids since they are not grid-aware, that
is, do not have knowledge of the characteristics of the
underlaying Grid infrastructure.
Given the dynamic nature of the grid systems,
any scheduler should provide allocations of jobs to
resources as fast as possible. Therefore, schedulers
based on very efficient methods are very important
especially in presence of time restrictions on job ex-
ecutions on the grid. Immediate and batch methods
fall into this type of methods since they distinguish
for their efficiency in contrast to more sophisticated
schedulers that could need larger execution times.
In the immediate mode, a job is scheduled as soon
as the job enters in the scheduler while in batch mode
jobs are grouped in a batch of jobs, which is sched-
uled according to a time interval specified by a map-
ping event. Thus, in immediate mode we are inter-
ested to schedule jobs without waiting for the next
time interval the scheduler will get activated or when
the job arrival rate is small having thus available re-
sources to execute jobs immediately. On the con-
trary, when the job arrival rate is high, resources are
most likely occupied with executing previously allo-
cated jobs, thus the batch mode could be activated. In
the immediate mode we consider the following five
methods: Opportunistic Load Balancing (OLB), Min-
imum Completion Time (MCT), Minimum Execution
Time (MET), Switching Algorithm (SA) and k-Percent
Best (kPB). The batch mode methods we consider are:
Min-Min, Max-Min, Sufferage and Relative Cost.
Ad hoc methods for for heterogenous computing
environments have been explored in several works
in the literature (Maheswaran et al., 1999; Abraham
et al., 2000; Braun et al., 2001; Wu and Shu, 2001).
Depending on the characteristics of the Grid resources
and jobs, these methods could present very different
performance. For instance, the MCT method per-
forms well for consistent computing environments,
however, it performs poorly for inconsistent com-
puting environments. Moreover, an ad hoc method
could perform well if the optimization criterion is the
makespan but could perform poorly if the optimiza-
tion criterion were the flowtime. Thus, as stand alone
methods, these ad hoc methods are not able to pro-
duce the best planning of jobs to resources for differ-
ent types of Grid resources and job characteristics.
In this work we have designed and implemented
an hyper-heuristic that uses the above mentioned ad
hoc methods to achieve the best scheduling of jobs to
Grid nodes according to the Grid and job character-
istics. The hyper-heuristic is a high level algorithm,
which examines the state and characteristics of the
Grid system (jobs and resources), and applies the ad
hoc method that yields the best planning of jobs to
Grid resources.
Our starting point was the empirical evaluation of
the nine ad hoc methods using the static benchmark of
static instances (Braun et al., 2001). This benchmark
is intended for heterogenous environments and con-
sists of families of instances sharing common charac-
teristics regarding the consistency of computing, the
heterogeneity of jobs and heterogeneity of resources.
We run each of the nine ad hoc methods on 100 dif-
ferent instances of the benchmark to study the behav-
ior of these ad hoc methods and then we embed this
knowledge on the hyper-heuristic. The performance
of the hyper-heuristic is evaluated in a dynamic en-
vironment through a prototype of a Grid simulator.
The experimental study showed the usefulness of us-
ing the hyper-heuristic, which uses knowledge of the
underlying Grid (such as the degree of consistency
of computing, heterogeneity of jobs and heterogene-
ity of resources) in its decision-taking as opposed to
using ad hoc heuristics as stand alone methods or a
pure random choice method. The performance of the
hyper-heuristic is done with regard to three parame-
ters of the Grid system: makespan, flowtime and re-
source utilization.
The rest of the paper is organized as follows. We
give in Section 2 a description of the job scheduling
in computational grids considered in this work. The
ad hoc methods used in the hyper-heuristic as well
as their evaluation is given in Section 3. The design
of the hyper-heuristic is given in Section 4 and some
computational results and evaluation is given in Sec-
tion 5. We end in Section 6 with some conclusions
and future work.
2 INDEPENDENT JOB
SCHEDULING IN GRIDS
The job scheduling problem in grids has many char-
acteristics in common with the traditional scheduling
problems. The objective is to efficiently map jobs to
resources; however, in a global, heterogenous and dy-
namic environment, such as grid environment, we re
A HYPER-HEURISTIC FOR SCHEDULING INDEPENDENT JOBS IN COMPUTATIONAL GRIDS
129

interested to find a practically good planning of jobs
very fast. Moreover, unlike traditional scheduling in
which the makespan is the most important parame-
ter, we are also interested to optimize flowtime and
resource utilization.
In this work we deal with the scheduling indepen-
dent jobs to resources. We describe this version next
and then give a formal definition of an instance of
the problem. Jobs have the following characteristics:
are originated from different users/applications, have
to be completed in unique resource (non-preemptive),
are independents and could also have their require-
ments over resources. This last characteristic is im-
portant if we would like to classify jobs originated in
data intensive or computing intensive applications.
On the other hand, resources could dynamically
be added/dropped from the Grid, can process one job
at a time and have their computing characteristics.
2.1 Expected Time to Compute
Simulation Model
In order to formalize the instance definition of the
problem, we use the ETC (Expected Time To Com-
pute) matrix model, see e.g. (Braun et al., 2001). This
model is used for capturing most important charac-
teristics of job and resources in distributed hetero-
geneous environments. In a certain sense, a good
planning jobs to resources will have to take into ac-
count the characteristics of jobs and resources. More
precisely, the Expected Time to Compute matrix,
ETC, has size nb
jobs × nb machines and its com-
ponents are defined as ETC[i][ j] = the expected exe-
cution time of job i in machine j. ETC matrices are
then classified into consistent, inconsistent and semi-
consistent according to the consistency of computing
of resources: (a) consistency means that if a machine
m
i
executes a job faster than machine m
j
, then m
i
ex-
ecutes all the jobs faster than m
j
. If this holds for all
machines participating in the planning, the ETC ma-
trix is considered consistent ; (b) inconsistency means
that a machine is faster for some jobs and slower for
some others; and, (c) semi-consistency is used to ex-
press the fact that an ETC matrix can have a consistent
sub-matrix. In this case the ETC matrix is considered
semi-consistent. Notice that the variability in charac-
teristics of jobs and resources yields to different ETC
configurations allowing thus to simulate different sce-
narios from real life distributed applications.
2.2 Problem Definition
Under the ETC simulation model, an instance of the
problem consists of:
– A number of independent (user/application) jobs
to be scheduled.
– A number of heterogeneous machines candidates
to participate in the planning.
– The workload of each job (expressed in millions
of instructions).
– The computing capacity of each machine (ex-
pressed in mips –millions of instructions per sec-
ond).
– Ready time ready[m] –when machine m will have
finished the previously assigned jobs. (Measures
the previous workload of a machine.)
– The Expected Time to Compute matrix, ETC.
Note that this version of the problem does not in-
clude local policies of resources, time for data trans-
mission and possible job dependencies. Yet, this ver-
sion arises in many grid-based applications, such as
in simulations, massive data processing, which can be
divided into independent parts, which are mapped to
different grid nodes.
Optimization criteria. Several parameters could
be measured for a given schedule. Among these, there
are (S denotes a possible schedule):
(a) makespan (finishing time of latest job) defined as
min
S
max{F
j
: j ∈ Jobs}.
(b) flowtime (sum of finishing times of jobs), that is,
min
S
∑
j∈Jobs
F
j
,
(c) resource utilization, in fact, we consider the av-
erage resource utilization. This last parameter is
defined using the completion time of a machine,
which indicates the time in which machine m will
finalize the processing of the previous assigned
jobs as well as of those already planned for the
machine. Formally, it is defined as follows:
completion[m] = ready[m] +
∑
j∈S
−1
(m)
ETC[ j][m].
Having the values of the completion time for the
machines, we can define the makespan, which is in
fact the local makespan by considering only the ma-
chines involved in the current schedule:
makespan = max{completion[i] | i ∈ Machines
′
}.
Then, we define:
ICSOFT 2007 - International Conference on Software and Data Technologies
130

avg utilization =
∑
{i∈Machines}
completion[i]
makespan· nb machines
.
It should be noted that these parameters are very
important for grid systems. Makespan measures the
productivity of the grid system, the flowtime mea-
sures the QoS of the grid system and resource utiliza-
tion indicates the quality of a schedule with respect to
the utilization of resources involved in the schedule
aiming to reduce idle time of resources.
3 AD HOC METHODS USED IN
THE HYPER-HEURISTIC
Several specific scheduling methods were considered
in the implementation of the hyper-heuristic. These
specific methods belongs to two families: immedi-
ate and batch mode. In the former we have methods
that schedule jobs to Grid resources as soon as they
enter in the Grid system, while in the later batches
of jobs are scheduled. Notice that disposing of these
two types of processing (immediate and batch) allows
us to better match the computational needs and re-
quirements of scheduling; thus, based on job charac-
teristics we could classify jobs as immediate-like or
batch-like.
3.1 Immediate Mode Methods
In the immediate mode we considered the following
five methods to be used in the hyper-heuristic: Oppor-
tunistic Load Balancing (OLB), Minimum Comple-
tion Time (MCT), Minimum Execution Time (MET),
Switching Algorithm (SA) and k-Percent Best (kPB).
OLB: This method assigns a job to the earliest idle
machine without taking into account the execution
time of the job in the machine. If two or more ma-
chines are available at the same time, one of them
is arbitrarily chosen. Usually this method is used in
scavenging grids. One advantage of this method is
that it tries to keep the machines as loaded as possi-
ble; however, the method is not aware of the execu-
tion times of jobs into machines, which is, certainly,
a disadvantage as regards the makespan and flowtime
parameters.
MCT: This method assigns a job to the machine
yielding the earliest completion time (the ready times
of the machines are used). Note that a job could be
assigned to a machine that does not have the small-
est execution time for that job. This method is also
known as Fast Greedy, originally proposed for Smart-
Net system.
MET: This method assigns a job to the machine
having the smallest execution time for that job. Note
that unlike MCT, this method does not take into ac-
count the ready times of machines. Clearly, in grid
systems of different computing capacity resources,
this method could produce an unbalance by assign-
ing jobs to fastest resources. However, the advantage
is that jobs are allocated to resources that best fit them
as regards the execution time.
SA: This method tries to overcome some limitations
of MET and MCT methods by combining their best
features. More precisely, MET is not good for load
balancing while MCT does not take into account exe-
cution times of jobs into machines. Essentially, the
idea is to use MET till a threshold is reached and
then use MCT to achieve a good load balancing. SA
method combines MET and MCT cyclically based on
the workload of resources.
In order to implement the method, let r
max
be the
maximum ready time and r
min
the minimum ready
time; the load balancing factor is then r
min
/r
max
,
which takes values in [0,1]. Note that for r = 1.0
we have a perfect load balancing and if r = 0.0 then
there exists at least one idle machine. Further, we
use to threshold values r
l
(low) and r
h
(high) for r,
0 ≤ r
l
< r
h
≤ 1. Initially, r = 0.0 so that SA starts allo-
cating jobs according to MCT until r becomes greater
than r
h
; after that, MET is activated so that r becomes
smaller than r
l
and a new cycle starts again until all
jobs are allocated.
kPB: For a given job, this method considers a sub-
set of candidate resources from which the resource to
allocate the job is chosen. The candidate set consists
of m· k/100 best resources (with respect to execution
times) for the given job, for k, m/100 ≤ k ≤ 100. The
machine to allocate the job is taken the one from the
candidate set yielding the earliest completion time.
Note that for k = 100, kPB behaves as MCT and for
k = 100/m it behaves as MET. It should be noted that
this method could perform poorly if the subset of re-
sources is not within k% best resources for any of jobs
implying thus a large idle time.
3.2 Batch Mode Methods
We considered the following batch methods: Min-
Min, Max-Min, Sufferage and Relative Cost.
A HYPER-HEURISTIC FOR SCHEDULING INDEPENDENT JOBS IN COMPUTATIONAL GRIDS
131

Min-Min: This method starts by computing a ma-
trix of values completion[i][ j] for any job i and
machine j based on ETC[i][ j] and ready
j
values
(completion[i][ j] = ETC[i][ j]+ready[ j]). For any job
i, the machine m
i
yielding the earliest completion time
is computed by traversing the ith row of the comple-
tion matrix. Then, job i
k
with the earliest comple-
tion time is chosen and mapped to the corresponding
machine m
k
(previously computed). Next, job i
k
is
removed from Jobs and completion[i][ j] values ∀i in
Jobs and machine m
k
are updated. The process is re-
peated until there are jobs to be assigned.
Max-Min: This method is similar to Min-Min. The
difference is that once it is computed, for any job i,
the machine m
i
yielding the earliest completion time,
the i
k
with the latest completion time is chosen and
mapped to the corresponding machine. Note that this
method is appropriate when most of the jobs entering
the grid system are short. Thus, Max-Min would try
to schedule at the same time all the short jobs and
longest ones while Min-Min would schedule first the
shortest jobs and then the longest ones implying thus
a larger makespan.
Sufferage: The idea behind this method is that bet-
ter scheduling could be obtained if we assign to a ma-
chine a job, which would “suffer” more if it were
assigned to any other machine. To implement this
method, the sufferage parameter of a job is defined
as the difference between the second earliest comple-
tion time of the job in machine m
l
and the first ear-
liest completion time of the job in machine m
k
. The
method starts by labelling all machines as available.
Then, in each iteration (of a while loop) a pending job
j is chosen to be scheduled. To this end, for job j,
the machines m
i
and m
l
and the sufferage value are
computed. If machine m
i
is available, then job j is as-
signed to m
i
. In case, m
i
is already executing another
job j
′
, then jobs j and j
′
will compete for machine m
i
;
the winner is the job of largest sufferage value. The
job loosing the competition will be considered once
all pending jobs have been analyzed.
Relative Cost: In allocating jobs to machines, this
method takes into account both the load balancing
of machines and the execution times of jobs in ma-
chines, that is, for a given job, find the machine that
best matches job’s execution time. This last criterion
is known as matching proximity and is used, apart
from makespan, flowtime and resource utilization for
measuring the performance of the allocation method.
Note that load balancing and matching proximity are
contradicting criteria. In order to find a good trade-
off between them the method uses two parameters,
namely, static relative cost and dynamic relative cost.
Given a job i and machine j, the static relative cost γ
s
ij
is defined as γ
s
ij
= ETC[i][ j]/etc
avg
i
, where:
etc avg
i
=
∑
j∈Machines
ETC[i][ j]/nb
machines.
This static parameter is computed once at the begin-
ning of the execution of the method. The dynamic
relative cost is computed at the beginning of each it-
eration k, as
γ
d
ij
= completion
(k)
[i][ j]/completion
avg
(k)
i
,
where:
completion avg
(k)
i
=
∑
j∈Machines
completion
(k)
[i][ j]
nb machines
.
At each iteration k, the best job i
best
is the one that
minimizes the expression (γ
s
i,m
∗
i
)
α
· γ
d
i,m
∗
i
, ∀i ∈ Jobs,
where
m
∗
i
= argmin{completion
(k)
[i][m] | m ∈ Machines}.
The value of α is fixed to 0.5.
3.3 Evaluation of the Ad Hoc Methods
on a Static Benchmark
We empirically evaluated the performance of the nine
ad hoc methods presented above, using a benchmark
of static instances (Braun et al., 2001). The objec-
tive is to use the evaluation results for taking better
decisions in running an immediate or batch method.
The benchmark is intended for distributed heteroge-
nous systems and is generated based on ETC matrix
model (see Subsection 2.1).
Braun et al. used the ETC matrix model to gener-
ate a benchmark of instances, which are classified into
12 different types of ETC matrices (each of them con-
sisting of 100 instances) according to three criteria:
job heterogeneity, machine heterogeneity and consis-
tency of computing. All instances consist of 512 jobs
and 16 machines and are labelled as u
x yyzz.k where:
- u means uniform distribution (used in generating
the matrix).
- x means the type of consistency (c–consistent,
i–inconsistent and s means semi-consistent).
- yy indicates the heterogeneity of the jobs (hi
means high, and lo means low).
ICSOFT 2007 - International Conference on Software and Data Technologies
132
- zz indicates the heterogeneity of the resources
(hi means high, and lo means low).
- k is the instance index (k = 0..99).
In order to evaluate the nine ad hoc methods, we
run each ad hoc methods on instances of the bench-
mark and observed which method did most frequently
yield the best result out of 100 runs. These instances
are of different characteristics regarding consistency
of computing, job heterogeneity and resource hetero-
geneity. In the following we use the instance notation
x
yyzz, for instance
c hilo
, to indicate the group of
instances having ETC consistency x, heterogeneity of
jobs yy and heterogeneity of resources zz. We give in
Figures 1 to 3 the results.
OLB
MCT
MET
SA
KPB
Min-
Min
Max-
Min
Suff
RC
c_hihi
X X
c_hilo
X X
c_lohi
X X
c_lolo
X X
i_hihi X X
i_hilo X X
i_lohi X X
i_lolo X X
s_hihi
X X
s_hilo
X X
s_lohi
X X
s_lolo
X X
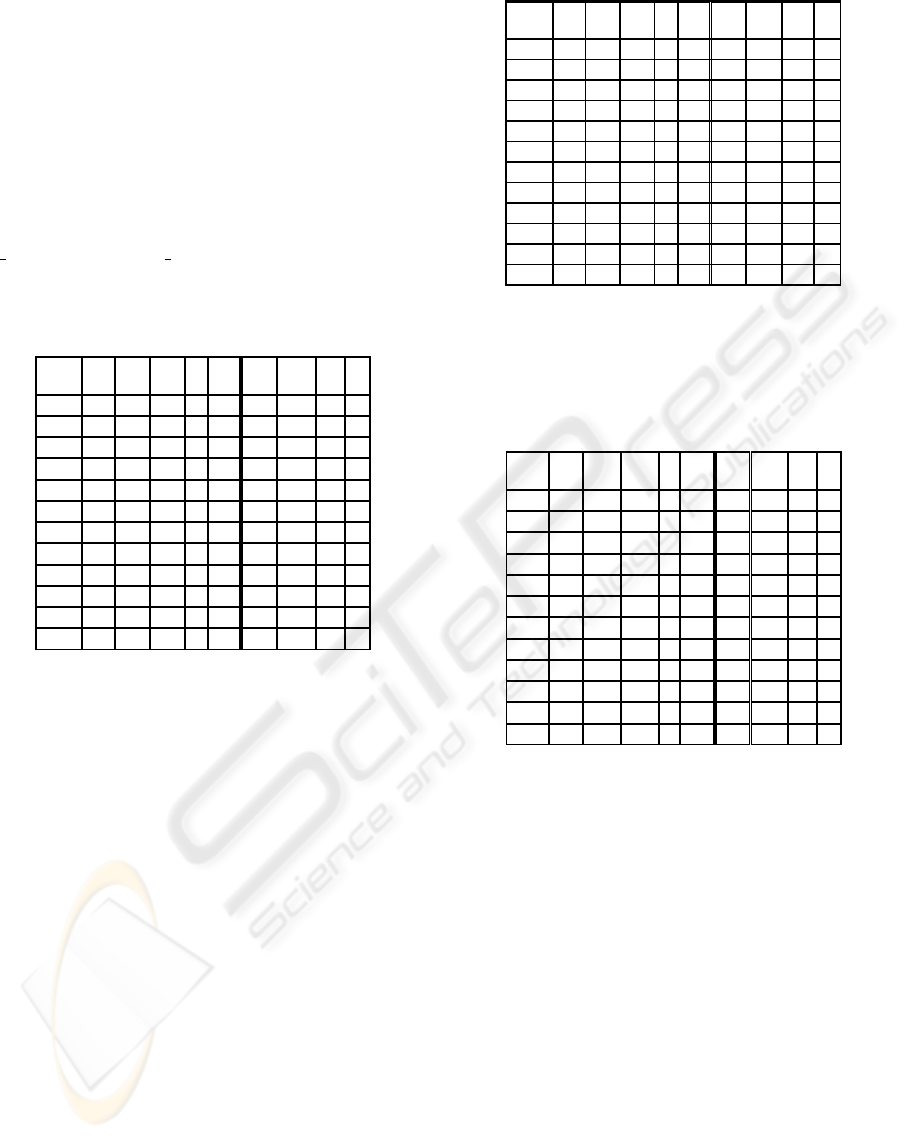
Figure 1: Performance of nine ad hoc... methods for Braun
et al.’s instances - Makespan values. The X mark means that
the method was chosen most of the times out of 100 runs
on different instances. The first five columns correspond
to immediate methods and the last four columns to batch
methods.
4 DESIGN OF THE
HYPER-HEURISTIC
The hyper-heuristic is conceived as high-level algo-
rithm capable of deciding which of ad hoc heuristics
to use according to the resource and job character-
istics. To this end, the hyper-heuristic uses a set of
parameters for decision-taking. More precisely, the
following parameters are used:
• A threshold parameter for job heterogeneity.
• A threshold parameter for resource heterogeneity
threshold.
• A parameter to indicate the objective to optimize
(makespan, flowtime or resource utilization).
Based on this parameters, the hyper-heuristic
takes the decision which of the immediate or batch
OLB
MCT
MET
SA
KPB
Min-
Min
Max-
Min
Suff
RC
c_hihi X X
c_hilo X X
c_lohi X X
c_lolo X X
c_hihi X X
i_hilo X X
i_lohi X X
i_lolo X X
s_hihi X X
s_hilo X X
s_lohi X X
s_lolo X X
Figure 2: Performance of nine ad hoc... methods for Braun
et al.’s instances - Flowtime values. The X mark means that
the method was chosen most of the times out of 100 runs
on different instances. The first five columns correspond
to immediate methods and the last four columns to batch
methods.
OLB
MCT
MET
SA
KPB
Min-
Min
Max-
Min
Suff
RC
c_hihi
X
X
c_hilo
X
X
c_lohi
X
X
c_lolo
X
X
i_hihi
X
X
i_hilo
X
X
i_lohi
X
X
i_lolo
X
X
s_hihi
X
X
s_hilo
X
X
s_lohi
X
X
s_lolo
X
X
Figure 3: Performance of nine ad hoc... methods for Braun
et al.’s instances - Resource Utilization values. The X mark
means that the method was chosen most of the times out
of 100 runs on different instances. The first five columns
correspond to immediate methods and the last four columns
to batch methods.
methods to use. The values of the first two parame-
ters are fixed similarly as in (Braun et al., 2001).
Input:
Parameters, ready-times, ETC matrix
1.
Evaluate job heterogeneity
. The variance of
the job workloads is computed and if it is larger
than the threshold parameter the instance of jobs
is considered of high heterogeneity, otherwise it is
considered of low heterogeneity.
2.
Evaluate resource heterogeneity
. The vari-
ance of the computing capacity of resources is
computed and if it is larger than the threshold pa-
rameter the instance of resources is considered of
high heterogeneity, otherwise it is considered of
A HYPER-HEURISTIC FOR SCHEDULING INDEPENDENT JOBS IN COMPUTATIONAL GRIDS
133
low heterogeneity.
3.
Examine ETC matrix to deduce its
consistency
. The ETC matrix is explored
by columns –columns correspond to resources–
and deduce which of three cases (consistent,
inconsistent or semi-consistent) holds.
4.
Choose the ad-hoc method to execute
based on parameters and results of steps 1.-3.
Essentially, the decision process embeds the
“maps” of Figures 1 to 3.
5.
Execute the chosen ad-hoc method.
Output:
The schedule
5 COMPUTATIONAL RESULTS
We use a Grid Simulator implemented with the Hy-
perSim discrete event simulation library (Phatana-
pherom and Kachitvichyanukul, 2003) to test the per-
formance of the hyper-heuristic. The simulator is
highly parameterizable through:
• distributions of arriving and leaving of resources
in the Grid and their Mips;
• distributions of job arrival to the Grid and their
workloads;
• the initial resources/jobs in the system and maxi-
mum jobs to generate;
• job and resource types
• percentage ratio of immediate/batch jobs.
For a schedule event, the simulator calls the hyper-
heuristic and passes to it the ETC matrix, ready times,
resources and jobs to be scheduled as input and re-
ceives the schedule from the hyper-heuristic in turn
(see Figure 4).
Simulator
Hyper
Heuristic
per
Parameters
Statistic
Results
Figure 4: The use of the hyper-heuristic with the Grid Sim-
ulator.
We used the Grid simulator for generating three
Grid types, namely, small, medium and large size and
conducted tests for three objectives: makespan, flow-
time and resource utilization. We compare the result
of the hyper-heuristic versus a pure random method
(that is, the method to run is chosen at random among
all considered immediate/batch methods). Moreover,
we varied the percentage ratio of immediate/batch
jobs: 0%, 25%, 75% and 100%.
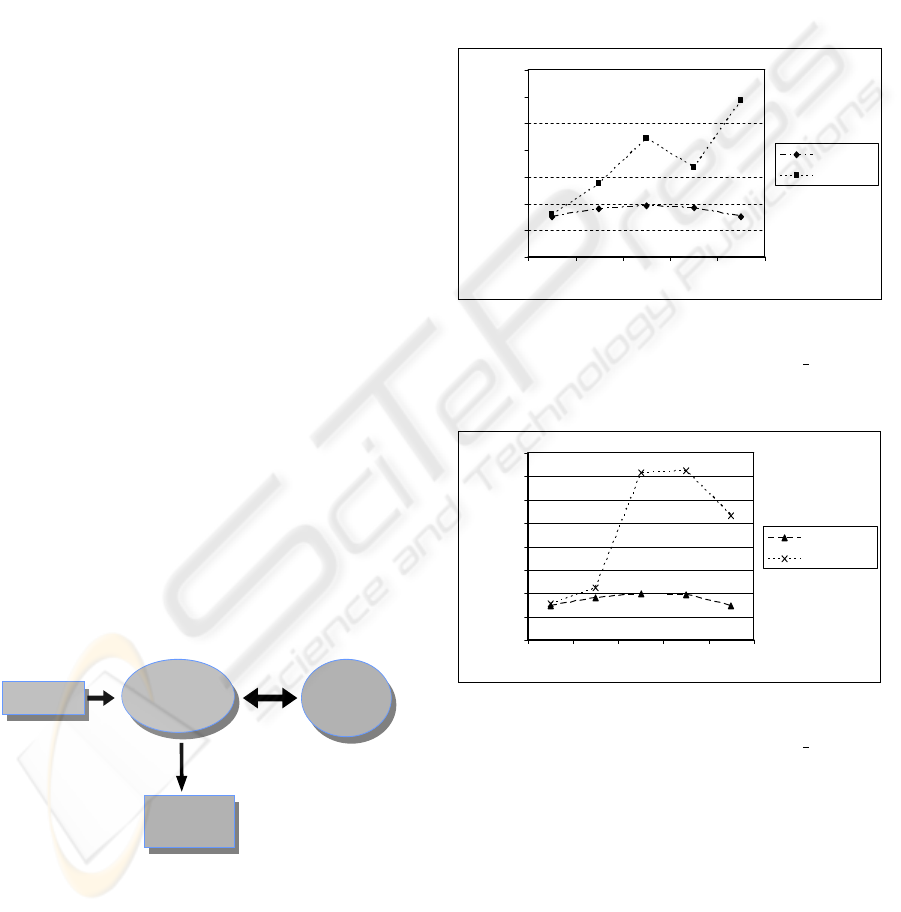
The results of makespan for small, medium and
large size Grids obtained with the hyper-heuristic are
compared with those of a random choice method (see
Figures 5 to 7). In these figures, the Y-axis indicates
the makespan value (in arbitrary time units) and the
X-axis the immediate vs batch ratio used.
0
2000000
4000000
6000000
8000000
10000000
12000000
14000000
0.00 0.25 0.50 0.75 1.00
Small
Small_RND
Figure 5: Comparison of makespan values for the dynamic
environment (small size grid) obtained with the hyper-
heuristic and a random choice method (denoted
RND
).
0
2000000
4000000
6000000
8000000
10000000
12000000
14000000
16000000
0.00 0.25 0.50 0.75 1.00
Medium
Medium_RND
Figure 6: Comparison of makespan values for the dynamic
environment (medium size grid) obtained with the hyper-
heuristic and a random choice method (denoted
RND
.
5.1 Evaluation
From the results of static setting (see Figures 1 to 3)
we can observe that the ad hoc methods perform quite
differently on the set of considered static instances.
On the other hand, it can also be observed that, their
performance depends on the objective to optimize.
Thus, for instance, MCT performs well for optimizing
makespan but very bad for optimizing flowtime. As a
matter of fact, these results were the starting point to
ICSOFT 2007 - International Conference on Software and Data Technologies
134
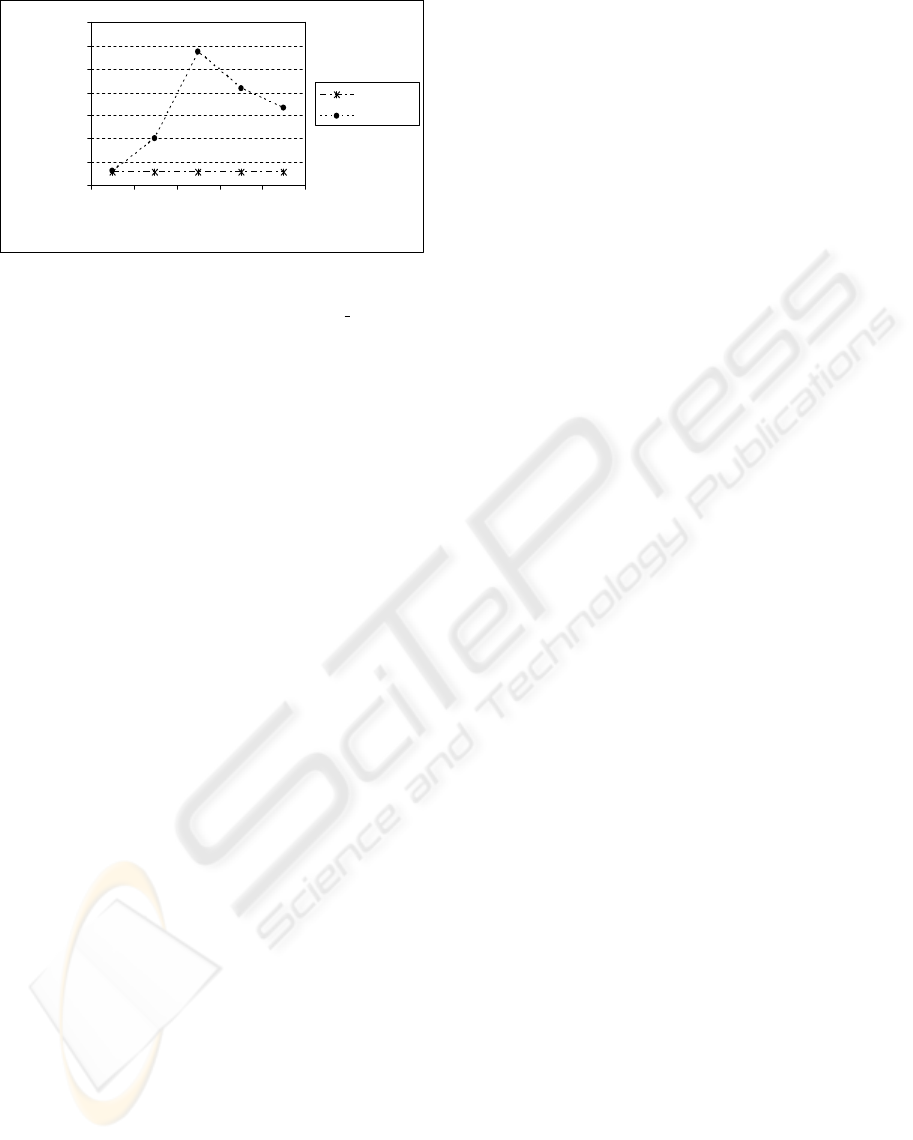
0
5000000
10000000
15000000
20000000
25000000
30000000
35000000
0.00 0.25 0.50 0.75 1.00
Immediate vs Batch ratio
Makespan (miillisecs)
Large
Large_RND
Figure 7: Comparison of makespan values for the dynamic
environment (large size grid) obtained with the hyper-
heuristic and a random choice method (denoted
RND
).
study the performance of the hyper-heuristic using a
Grid simulator. On the dynamic setting (see Figures 5
to 7) we clearly see that the hyper-heuristic produces
high quality planning of jobs as compared to pure ran-
dom choices of ad hoc methods.
6 CONCLUSION AND FUTURE
WORK
In this work we have presented an hyper-heuristic
that uses a set of parameters and ad hoc methods for
scheduling independent jobs to Grid resources. The
hyper-heuristic tries to deduce the Grid resources and
jobs characteristics and applies the ad hoc method
that yield the best planning of jobs for the Grid con-
figuration.
From the experimental evaluation, we observed
that the planning of jobs to grid resources obtained by
the hyper-heuristic using guided decisions are much
better and coherent than pure random decisions (with-
out any knowledge of the underlaying Grid charac-
teristics). For makespan, we have seen that the re-
sults worsen when the ratio of immediate/batch jobs
is close to 0.5, which is an indicator that immediate
and batch methods “damage” each others strategy. On
the other hand, for flowtime, when the ratio of im-
mediate/batch is favorable to batch, better results are
obtained.
We plan to evaluate the hyper-heuristic in a real
grid, on the one hand by developing an interface to
use it, and on the other, by incorporating a module
that will be in charge of extracting the state of the net
(grid characteristics, job characteristics etc.) and will
pass it to the hyper-heuristic.
ACKNOWLEDGEMENTS
This research is partially supported by Projects
ASCE TIN2005-09198-C02-02, FP6-2004-ISO-
FETPI (AEOLUS) and MEC TIN2005-25859-E.
REFERENCES
Abraham, A., Buyya, R., and Nath, B. (2000). Nature’s
heuristics for scheduling jobs on computational grids.
In The 8th IEEE International Conference on Ad-
vanced Computing and Communications, India.
Braun, T., Siegel, H., Beck, N., Boloni, L., Maheswaran,
M., Reuther, A., Robertson, J., Theys, M., and Yao,
B. (2001). A comparison of eleven static heuristics
for mapping a class of independent tasks onto hetero-
geneous distributed computing systems. Journal of
Parallel and Distributed Computing, 61(6):810–837.
Casanova, H. and Dongarra, J. (1998). Netsolve: Network
enabled solvers. IEEE Computational Science and
Engineering, 5(3):57–67.
Foster, I. and Kesselman, C. (1998). The Grid - Blueprint
for a New Computing Infrastructure. Morgan Pub.
Foster, I., Kesselman, C., and Tuecke, S. (2001). The
anatomy of the grid. International Journal of Super-
computer Applications, 15(3).
Garey, M. and Johnson, D. (1979). Computers and
Intractability – A Guide to the Theory of NP-
Completeness. W.H. Freeman and Co.
Linderoth, L. and Wright, S. (2003). Decomposition algo-
rithms for stochastic programming on a computational
grid. Computational Optimization and Applications,
24:207–250.
Maheswaran, M., Ali, S., Siegel, H., Hensgen, D., and Fre-
und, R. (1999). Dynamic mapping of a class of in-
dependent tasks onto heterogeneous computing sys-
tems. Journal of Parallel and Distributed Computing,
59(2):107–131.
Phatanapherom, S. and Kachitvichyanukul, V. (2003). Fast
simulation model for grid scheduling using hypersim.
In Proceedings of the 2003 Winter Simulation Confer-
ence, New Orleans, USA.
Wright, S. (2001). Solving optimization problems on com-
putational grids. Optima, 65.
Wu, M.-Y. and Shu, W. (2001). A high-performance map-
ping algorithm for heterogeneous computing systems.
In Proceedings of the 15th International Parallel &
Distributed Processing Symposium, page 74.
A HYPER-HEURISTIC FOR SCHEDULING INDEPENDENT JOBS IN COMPUTATIONAL GRIDS
135
