
PERFORMANCE ANALYSIS OF SCHEDULING-BASED LOAD
BALANCING FOR DISTRIBUTED AND PARALLEL SYSTEMS
USING VISUALSIM
Abu Asaduzzaman, Manira Rani
CSE Department, Florida Atlantic University, 777 Glades Rd, Boca Raton, FL, USA
Darryl Koivisto
Architecture Modeling Group, Mirabilis Design, Inc., 830 Stewart Dr, San Jose, CA, USA
Keywords: Distributed and parallel sys
tem, scheduling algorithm, load balancing, performance analysis, VisualSim.
Abstract: The concurrency in a distributed and parallel system can be used to improve the performance of that system
b
y properly distributing the tasks among the processors. However, the advantage of parallelism may be
offset by the increased complexity of load balancing techniques. Scheduling is proven to be an effective
technique for load balancing in any distributed and parallel system. Studies indicate that for application-
specific systems static scheduling may be the potential choice due to its simplicity. In this paper, we analyze
the performance of load balancing by static scheduling for distributed and parallel systems. Using
VisualSim, we develop a simulation program that models a system with three processors working
simultaneously on a single problem. We obtain the response time and completion time for different
scheduling algorithms and task groups. Simulation results show that load balancing by scheduling has
significant impact on the performance of distributed and parallel systems.
1 INTRODUCTION
In a distributed and parallel system, tasks are
simultaneously executed on multiple processors in
order to improve performance. Scheduling and load
balancing techniques are key areas for obtaining
good performance in parallel and distributed
applications. Such techniques can be provided either
at the application level, or at the system level. In
application level, mapping of a parallel computation
onto a parallel computer system is one of the most
important issues. Similarly, the concept of
scheduling and load balancing is very important at
system level. System-level simulation using
computer programs is an effective technique for
performance analysis of complex distributed and
parallel systems (Asaduzzaman, 2004), (Amoroso,
2006), (Dunigan, 2005), (Wikipedia, 2007).
Two types of load balancing policies (static and
dy
namic) are often used for balancing the workload
of distributed and parallel systems. Static policies
use only the system statistical information in making
load balancing decisions, and their principal
advantage is their simplicity in mathematical
analysis and implementation. They do not, however,
adapt to fluctuations in workload. On the other hand,
dynamic load balancing policy reacts to the current
system state. Dynamic policies attempt to balance
the workload dynamically as jobs arrive and are
therefore thought to be able to further improve
system performance. This makes dynamic policy
necessarily more complex than the static one.
Studies concerning dynamic load balancing may
oversimplify the system and introduce inaccurate
results (Renard, 2003), (Zhangt, 1995). Studies show
that static scheduling policies are easy to implement
and help improving performance. In an application-
specific system where the expected workload is
almost known, static scheduling may be the potential
choice to balance the load.
In this work, performance of schedule-based
lo
ad balancing is analyzed for distributed and
parallel systems using VisualSim. In Section 2, some
related articles are presented. Section 3 discusses
scheduling and load balancing issues. Simulation
details are presented in Section 4. In Section 5, the
106
Asaduzzaman A., Rani M. and Koivisto D. (2007).
PERFORMANCE ANALYSIS OF SCHEDULING-BASED LOAD BALANCING FOR DISTRIBUTED AND PARALLEL SYSTEMS USING VISUALSIM.
In Proceedings of the Second International Conference on Software and Data Technologies - PL/DPS/KE/WsMUSE, pages 106-111
Copyright
c
SciTePress

simulation results are discussed. Finally, we
conclude our work in Section 6.
2 RELATED WORK
A lot of research work has been done and a lot of
articles have been published on load balancing in
distributed and parallel systems. In this section, we
include only those that are very relevant to the work
presented in this paper.
In (Renard, 2003), dynamic, static, and a mixture
of both techniques are used for load balancing in a
distributed and parallel system. In dynamic
strategies, data dependencies, in addition to
communication costs and control overhead, may
well lead to slow the whole process down to the
pace of the slowest processors. In static strategies,
data redistributions and control overhead are
suppressed or minimized during execution. This
article concludes that static allocations are necessary
for a simple and efficient system.
A static load balancing scheme for partial
differential equation solvers in a distributed
computing environment is described in (Ichikawa,
2000). Both communication and computing time are
considered to minimize the total execution time.
This method is expected to be applicable to a wide
variety of parallel processing applications.
(Lee, 2000) proposes a load balancing algorithm
for scalable high performance cluster-based shared-
memory multiprocessor systems. This algorithm
performs load redistribution in a cost-effective way
only when the possible savings outweigh the
redistribution costs. Results show that this algorithm
may enhance performance if using it properly.
A simpler version of single-point algorithms than
those of Tantawi and Towsley are proposed in (Kim,
1992) for the models of distributed computer
systems with a single communication channel and
star network configurations. (Soklic, 2002)
introduces a new load balancing algorithm, called
diffusive load balancing. The algorithms are tested
in three simulated client-server environments – a
small-scale, Intranet, and Internet environment.
Experimental results are impressive. Various
scheduling and load balancing issues related to
distributed and parallel systems are addressed in
(Kemada, 2000), (Zhang, 1991), (Magee, 2000). The
fundamental ideas of their algorithms may be useful
for some other related models.
(Anguille, 1995) implements both a static-load
balancing algorithm and a receiver-initiated dynamic
load-sharing algorithm to achieve high parallel
efficiencies on both the IBM SP2 and Intel
IPSC/860 parallel computers. Significant speedup
improvement was recorded for both methods.
The performances of adaptive and static load
balancing policies in a heterogeneous distributed
system model are compared using simulation
(Zhangt, 1995). Simulation results show that both
dynamic and static policies improve performance
dramatically. It is also shown that when overheads
are non-negligibly high at heavy system loads, static
policies can provide performance more stable and
better than that provided by dynamic policies.
In this work, we use static scheduling to balance
the load of a distributed and parallel system.
3 SCHEDULING AND LOAD
BALANCING
Scheduling and load balancing techniques are
important keys to obtain good performance in
distributed and parallel applications.
3.1 Distributed System
In a distributed system, different parts of a program
run simultaneously on multiple processors that
communicate with each other via a network in order
to improve the overall system performance. The
Berkeley Open Infrastructure for Network
Computing (BOINC) is a good example of a
distributed system.
3.2 Parallel System
In a parallel system, computation of a task is
performed simultaneously on multiple processors in
order to obtain results faster. According to Flynn's
taxonomy, parallel architectures are SIMD (Single
Instruction Multiple Data) or MIMD (Multiple
Instruction Multiple Data) type.
Distributed computing is a type of parallel
processing. Parallel processing requires that a
program be parallelized (i.e., divided into parts that
can run simultaneously); distributed computing also
requires that the division of the program take into
account the different environments on which the
different parts of the program will be running.
3.3 Deadlock and Starvation
Deadlock and starvation are two common problems
in distributed and parallel system where many
processes share a specific mutually exclusive
resource. Deadlock refers to a specific circumstance
when two or more processes are each waiting for
another to release a resource. Starvation refers to a
PERFORMANCE ANALYSIS OF SCHEDULING-BASED LOAD BALANCING FOR DISTRIBUTED AND
PARALLEL SYSTEMS USING VISUALSIM
107
situation where a process is continuously denied to
acquire necessary resources.
There are four necessary “Coffman” conditions
for a deadlock to occur (Wikipedia, 2007).
Mutual exclusion (ME) – there should be at
least one non-sharable resource. Only one
processor can access/use the non-sharable
resource at any time.
No pre-emption – resources cannot be pre-
empted. A requesting processor can not have
immediate access to the requested resource(s)
until the holding processor is done and give up.
Hold and wait – processes already holding
resources may request new resources.
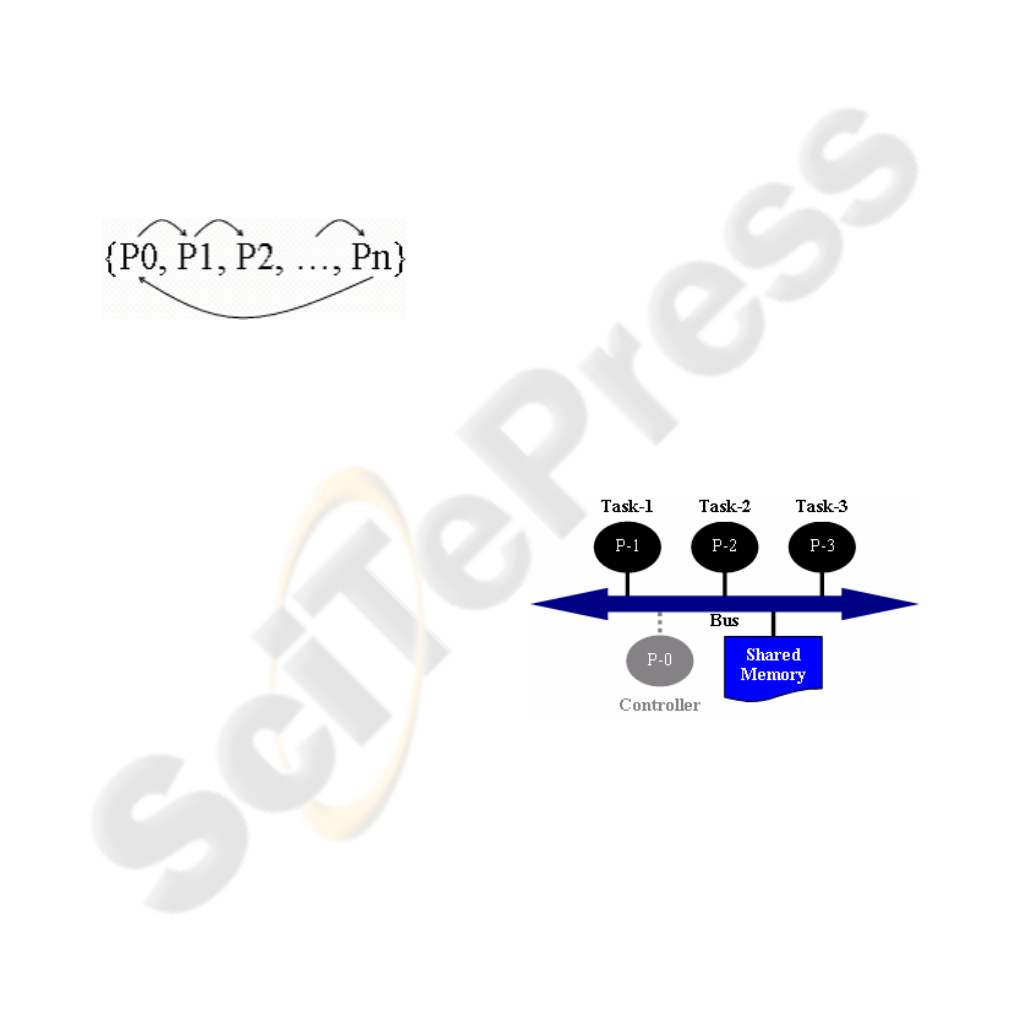
Circular wait – two or more processes form a
circular chain where each process waits for a
resource that the next process in the chain holds.
In Figure 1, P0 is waiting on P1, P1 is waiting
on P2, …, and finally, Pn is waiting on P0.
Figure 1: Circular waiting.
In our simulation, we experience both deadlock
and starvation. In order to keep the simulation
program simple, we avoid deadlock and starvation
by using ME, pre-emption, and priority.
3.4 Scheduling
Scheduling is a key factor that refers to the way
processes are assigned priorities in a priority queue.
This assignment is carried out by software known as
a scheduler. The primary goal of the scheduler is to
balance loads among the processors and prevent any
deadlock or starvation in the system. Some popular
algorithms are discussed here.
First come first serve (FCFS): FCFS is non-pre-
emptive and the simplest scheduling algorithm. It is
troublesome for time-sharing systems.
Priority: Each process has a priority, the highest
priority wins, and the equal-priority follows FCFS
FCFS + Pre-emption + Priority: A process must
give up resources it may acquire before it completes
its task, if higher priority jobs arrive.
Round robin (RR): RR is equivalent to FCFS +
pre-emption + time-quantum. RR is appropriate for
time-sharing systems.
In this work, FCFS, pre-emption + priority, RR,
and pre-emption + time-slice algorithms are
considered.
3.5 Load Balancing
Load balancing is a technique to spread work among
many processes/processors in order to get optimal
resource utilization and decrease computing time.
The load balancing methods help improving
performance by selecting the appropriate resources
to run the specific tasks.
We use different task groups and scheduling
algorithms for balancing the load of in a distributed
and parallel system.
4 SIMULATION
In this work, we focus on evaluating the
performance of scheduling-based load balancing
techniques for a distributed and parallel system
using VisualSim.
4.1 Simulated Architecture
In a distributed and parallel system, a large task is
divided into small tasks and assigned among the
processors. Figure 2 shows the simulated
architecture with three processors working together
to solve a single problem and one processor
controlling the system.
Figure 2: Multiprocessor architecture.
Scheduling activities are maintained by the
controlling processor (P-0). Each working processor
(P-1 to P-3) needs to access shared memory in order
to complete the task. Processors submit their
requests for the shared memory to the scheduler and
scheduler allow one processor at a time to access the
shared memory.
ICSOFT 2007 - International Conference on Software and Data Technologies
108
4.2 Assumptions
We make the following assumptions to simplify the
model and run the VisualSim simulation.
1. Tasks from the same processor are assigned
numbers and are executed in order. Tasks from
different processors are assigned priorities.
2. For two independent tasks T1 and T2, both
orders T1Æ T2 and T2 Æ T1 are okay.
3. Like memory, the bus in the architecture is also
shared, but the impact of the shared bus on
performance is considered negligible.
4.3 System Parameters
Various task groups and scheduling schemes are
used to run the simulation. Each task may have start
time, mean time (when the next task may generate),
priority, and ME indicator. We consider three
different task groups based on the task generation
criteria as shown in Table 1.
Table 1: Three task groups.
Task
Group
Task-1
Start
Time
Task-2
Start
Time
Task-3
Start
Time
1 0.0 0.0 0.0
2 0.0 2.0 4.0
3 Random
(0.0, 3.0)
Random
(0.0, 3.0)
Random
(0.0, 3.0)
We use five different scheduling schemes using
FCFS, priority + pre-emption, and RR + time-
slicing. All three task groups are tested using these
scheduling schemes. Table 2 shows Schedule 1,
which is simple FCFS scheme – no priority, no ME
are involved.
Table 2: Schedule 1 – FCFS.
Proc. Task
No. No.
Task
Group
Priority
(NA)
ME
(NA)
1 1 All NA NA
2 2 All NA NA
3 3 All NA NA
Schedule 2 is FCFS with Pre-Emption (PreE) and
priority but no ME as shown in Table 3.
Table 3: Schedule 2 – FCFS with PreE, and priority.
Proc. Task
No. No.
Task
Group
Priority ME
(No)
1 1 All 1 No
2 2 All 2 No
3 3 All 3 No
Schedule 3 is a variation of Schedule 2 where
ME=Yes for Proc-1 and ME = No for Proc-2 and
Proc-3.
Table 4 shows Schedule 4, which is RR with
PreE, priority, and no ME. Time slice (TS) is 1 time
unit for all tasks.
Table 4: Schedule 4 – RR (TS = 1) with PreE and Priority.
Proc/
Task
Time
Slice
Task
Group
Priority ME
1 / 1 1 All 1 No
2 / 2 1 All 2 No
3 / 3 1 All 3 No
Schedule 5 is a variation of Schedule 4 where
Task-1 is allowed for 3 TS, Task-2 is for 2, and
Task-3 is only for 1 TS.
The task groups and schedules are used to run
the simulation model.
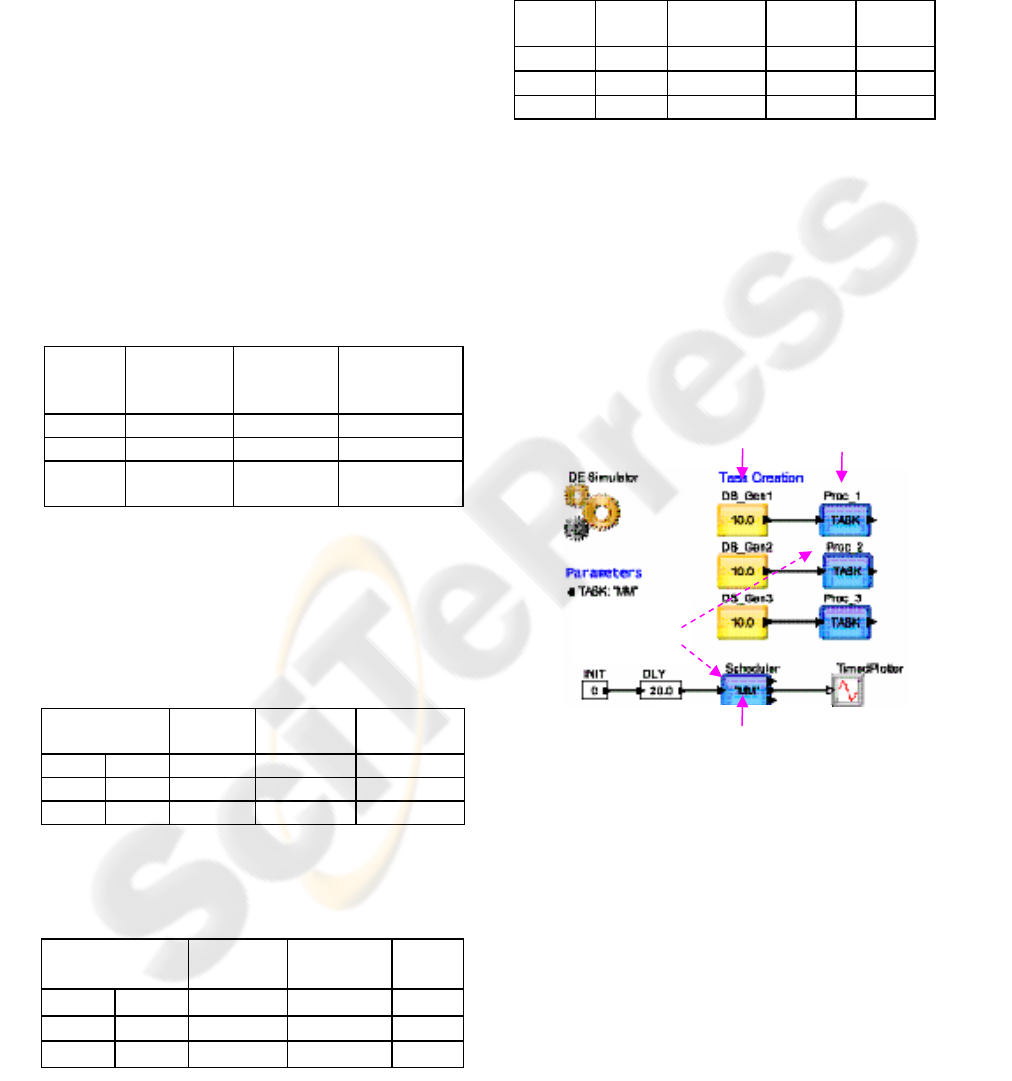
4.4 VisualSim Model
VisualSim is a system-level simulation tool from
Mirabilis Design, Inc. The simulated architecture is
modelled using VisualSim as shown in Figure 3. In
VisualSim, a system is described in three major
pasts - Architecture, Behaviour, and Workload.
Figure 3: VisualSim model of the architecture.
Architecture includes the major elements such as
processor and memory. Behaviour describes the
actions performed on the system. Workload captures
the transactions that traverse the system during the
simulation (VisualSim, 2007).
5 RESULTS
In this paper, we evaluate the performance of
scheduling-based load balancing techniques for a
distributed and parallel system. First we discuss the
Workload Processors
Shared Memory
Vi
r
tual
Execution
PERFORMANCE ANALYSIS OF SCHEDULING-BASED LOAD BALANCING FOR DISTRIBUTED AND
PARALLEL SYSTEMS USING VISUALSIM
109
impact of scheduling on load balancing. Then we
present the response time and completion time for
different scheduling schemes.
Average Response Time Vs Schedule
for Task Group-1
0
2
4
6
8
10
Sch-1 Sch-2 Sch-3 Sch-4 Sch-5
Schedules
Time (unit)
Task-1
Task-2
Task-3
Total
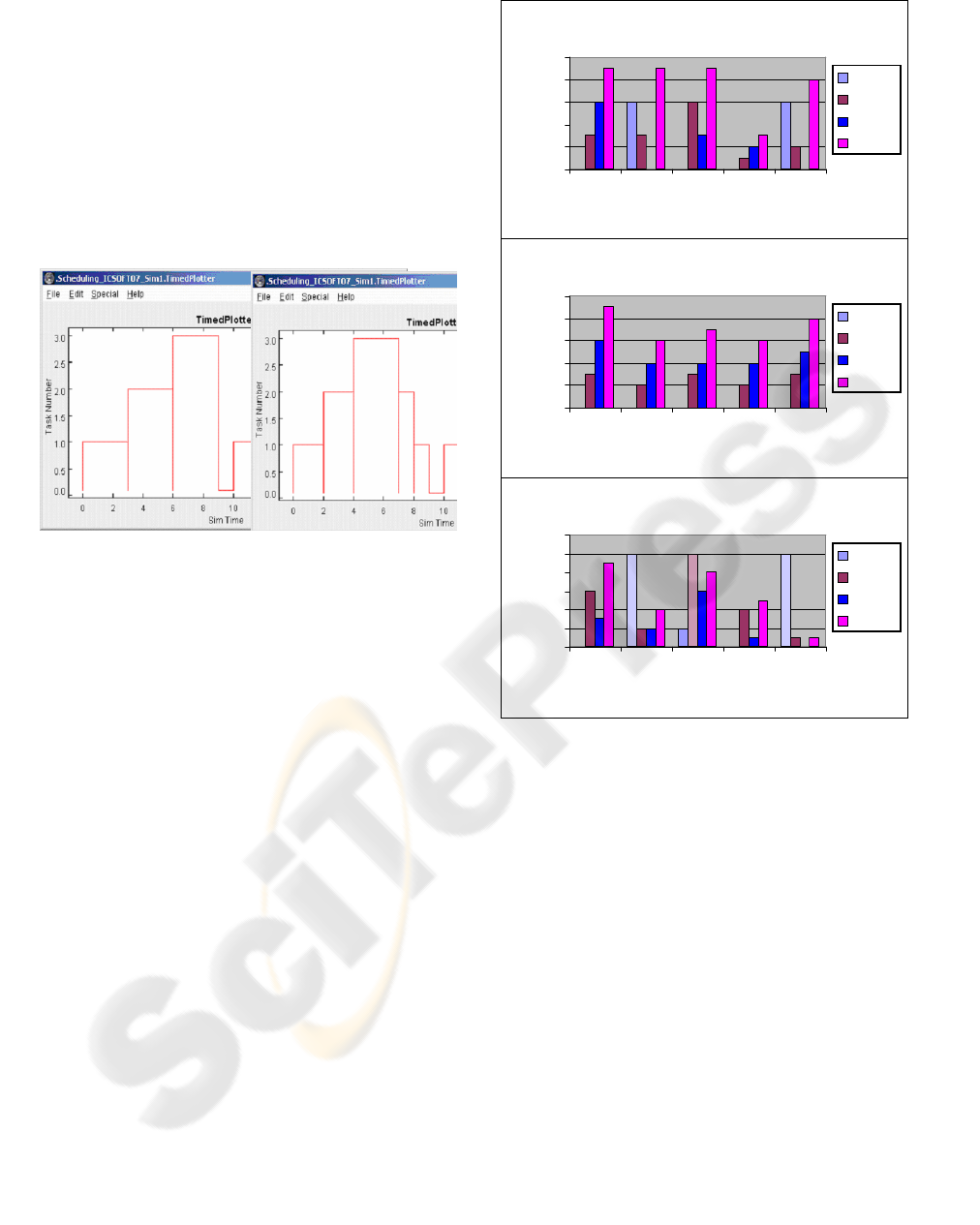
Figure 4(a) shows the simulation output for
schedule FCFS (no pre-emption). Task-1 (from
Proc-1 with priority 1) starts at 0.0. Task-2 is
generated by Proc-2 at time 2.0 with priority 2.
Task-1’s ME = ‘Yes’. So, Task-2 waits (for 1.0 unit
of time) until Task-1 is finished at 3.0. Similarly,
Task-3 (from Proc-3) is issued at 4.0 with priority 3,
waits for 2.0 units of time, starts at 6.0, and
completes at 9.0.
(a) ME = Yes (b) ME = No
Figure 4: Task versus time for FCFS; (a) ME = Yes and
(b) ME = No.
Now we investigate the impact of FCFS with
pre-emption and ME = No. Figure 4(b) shows the
simulation output for this schedule. Here, Task-1
should give the resources at time 2.0 even though it
is not completed and Task-2 starts. Similarly Task-3
is issued at 4.0 with priority 3 ad starts at 4.0, and
completes at 7.0. Task-2 and Task-1 are completed
later time (at time 8.0 and 9.0 respectively) based on
their priorities.
Figure 4 indicates that scheduling has significant
impact on load balancing in a distributed and
parallel system. The impact of load balancing by
scheduling on performance is presented in the
following subsections.
5.1 Response Time
Response time is a measure of time a system takes to
react to a given input (from request to the first react).
The average response time versus schedules for task
group 1, 2, and 3 are presented in Figure 5.
Figure 5: Average response time versus schedules for task
groups 1, 2, and 3.
Simulation results show schedule 4 offers the
best average response time for task group 1.
Similarly, schedules 2 and 4 offer the best
performance for task group 2. For task group 3,
simulation results show that Task-1 of schedule 2
never starts, even though Task-2 and Task-3 start at
2.0. Similarly, Task-2 of schedule 3 and Task-1 of
schedule 5 never start.
5.2 Completion Time
Task completion time is the time a system takes to
perform a task (from start to finish). Figure 6 shows
the completion time required by task groups 1, 2,
and 3 for various schedules. Simulation results show
that schedule 1 offers the best total completion time
for all task groups. For task group 3, some tasks
(example: Task-1 of schedule 2) never start.
Average Response Time Vs Schedule
for Task Group-2
0
2
4
6
8
10
Sch-1 Sch-2 Sch-3 Sch-4 Sch-5
Schedules
Time (unit)
Task-1
Task-2
Task-3
Total
Average Response Time Vs Schedule
for Task Group-3
0
2
4
6
8
10
12
Sch-1 Sch-2 Sch-3 Sch-4 Sch-5
Schedules
Time (unit)
Task-1
Task-2
Task-3
Total
Task-3
Task-2
Task-1
ICSOFT 2007 - International Conference on Software and Data Technologies
110
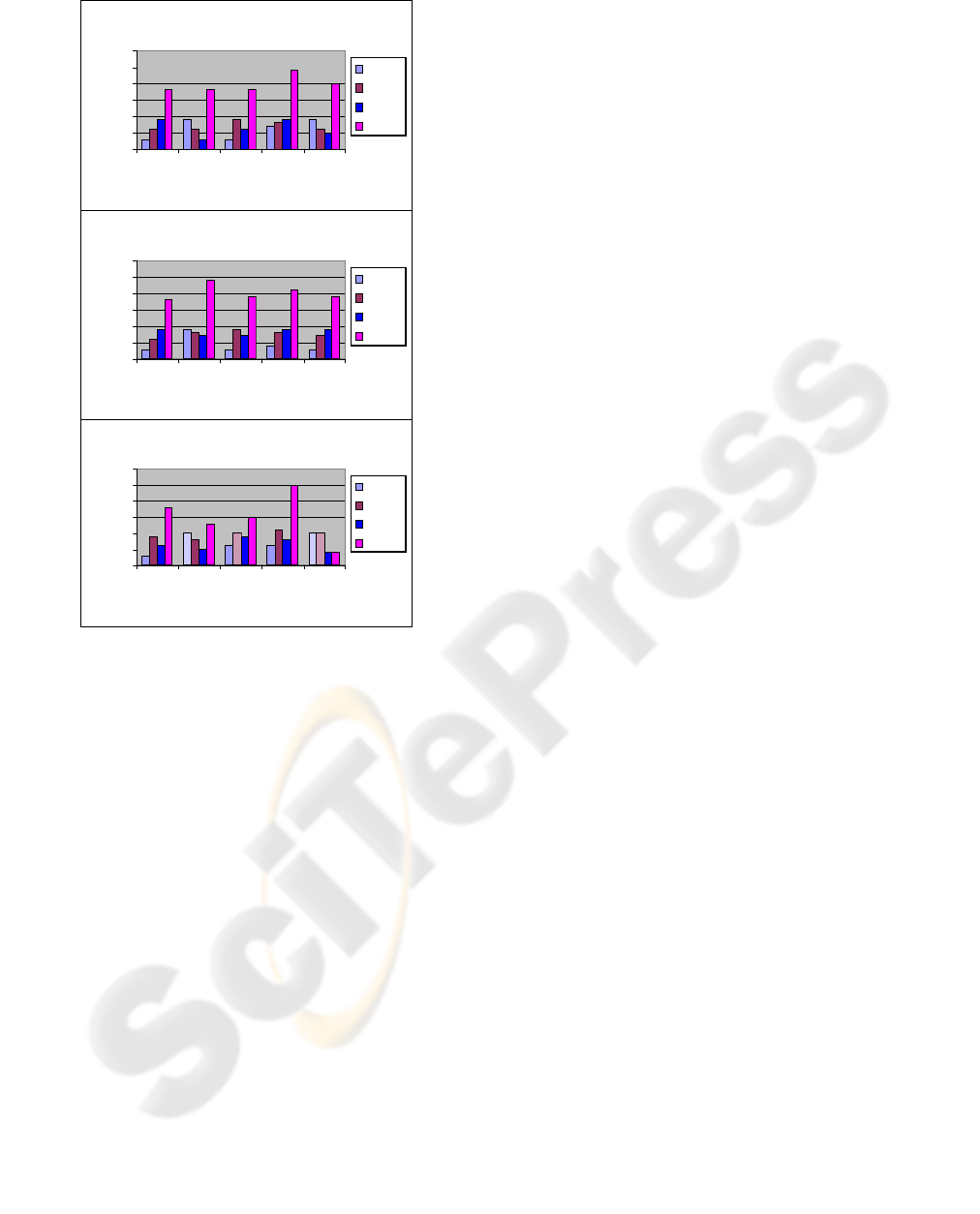
Figure 6: Total completion time versus schedules for task
groups 1, 2, and 3.
6 CONCLUSIONS
In a distributed and parallel system, performance can
be improved by properly distributing the concurrent
tasks among the processors. However, the advantage
of parallelism may be offset by the increased
complexity of load balancing techniques. Scheduling
is proven to be an effective technique for load
balancing in distributed and parallel systems. Studies
indicate that when the expected workload is (almost)
known, static scheduling may be a potential choice
to balance the load in such a system (Renard, 2003),
(Zhangt, 1995). Therefore, static scheduling may be
used in order to improve the overall system
performance by balancing the load. In this paper, we
analyze the performance of load balancing technique
by static scheduling for a distributed and parallel
system. We develop a simulation program using
VisualSim. Simulated architecture includes three
processors working on a single task simultaneously
using the shared memory (and one controlling
processor to run the scheduler). We obtain the
performance in terms of the average response time
and the total completion time for different
scheduling algorithms and task groups. Simulation
results show that scheduling technique has
significant impact on load balancing. Simulation
results also show that load balancing by scheduling
can be used to improve the performance of
distributed and parallel systems.
Total Completion Time Vs Schedule
for Task Group-1
0
5
10
15
20
25
30
Sch-1 Sch-2 Sch-3 Sch-4 Sch-5
Schedules
Time (unit)
Task-1
Task-2
Task-3
Total
We plan to evaluate the performance of dynamic
scheduling and load balancing in distributed and
parallel systems in our next endeavour.
Total Completion Time Vs Schedule
for Task Group-2
0
5
10
15
20
25
30
Sch-1 Sch-2 Sch-3 Sch-4 Sch-5
Schedules
Time (unit)
REFERENCES
Task-1
Task-2
Asaduzzaman, A., Mahgoub, I., 2004. Evaluation of
Application-Specific Multiprocessor Mobile System,
SPECTS’04
Task-3
Total
Amoroso, A., Marzullo, K., 2006. Multiple Job
Scheduling in a Connection-Limited Data Parallel
System, IEEE Tran on Parallel & Distributed Systems
Dunigan, T., Vetter, J., White, J., Worley, P., 2005.
Performance Evaluation of the Cray X1 Distributed
Shared-Memory Architecture, IEEE Computer Society
Total Completion Time Vs Schedule
for Task Group-3
0
5
10
15
20
25
30
Sch-1 Sch-2 Sch-3 Sch-4 Sch-5
Schedules
Time (unit)
Wikipedia, 2007. Distributed and Parallel Computing,
Task-1
http://en.wikipedia.org/wiki/
Task-2
Renard, H., Robert, Y., Vivien, F., 2003. Static load-
balancing techniques for iterative computations on
heterogeneous clusters,
Task-3
Total
Zhangt, Y., Hakozakit, K., Kamedat, H., Shimizu, K.,
1995. A Performance Comparison of Adaptive and
Static Load Balancing in Heterogeneous Distributed
Systems, IEEE
Ichikawa, S., Yamashita, S., 2000. Static Load Balancing
of Parallel PDE Solver for Distributed Computing
Environment, Proceedings ISCA 13th Int'l Conf. on
Parallel and Distributed Computing Systems
Lee, S., Yang, C., Tseng, S., Tsai, C., 2000. A Cost-
Effective Scheduling with Load Balancing for
Multiprocessor Systems
Kim, C., Kameda, H., 1992. An Algorithm for Optimal
Static Load Balancing in Distributed Computer
Systems, IEEE Transactions on Computers
Soklic, M., 2002. Simulation of load balancing algorithms:
a comparative study, ACM Press, New York
Anguille, L., Killough, J., LI, T., Toepfer, J., 1995. Static
and dynamic load-balancing strategies for parallel
reservoir simulation, Symposium on reservoir
simulation, TX
Kameda, H., Fathyy, E., Ryu, I., Li, J., 2000. A
Performance Comparison of Dynamic vs. Static Load
Balancing Policies in a Mainframe - Personal
Computer Network Model, CDC00-INV1601
Zhang, Y., Kameda, H., Shimizu, K., 1991. Parametric
analysis of optimal static load balancing in distributed
computer systems. J. Inf. Process.
Magee, J., Kramer, J., 2000. Concurrency: State Models &
Java Programs, John Wiley & Sons Publisher,
London, 2Rev Ed edition.
VisualSim, 2007. System-level simulator from Mirabilis
Design, Inc.
http://www.mirabilisdesign.com
PERFORMANCE ANALYSIS OF SCHEDULING-BASED LOAD BALANCING FOR DISTRIBUTED AND
PARALLEL SYSTEMS USING VISUALSIM
111
