
OPTIMIZATION OF DISTRIBUTED OLAP CUBES WITH AN
ADAPTIVE SIMULATED ANNEALING ALGORITHM
Jorge Loureiro
Departamento de Informática, Escola Superior de Tecnologia de Viseu
Instituto Superior Politécnico de Viseu, Campus Polit
écnico de Repeses, 3505-510 Viseu, Portugal
Orlando Belo
Departamento de Informática, Escola de Engenharia
Universidade do Minho, Campus de Gualtar, 4710-057 Braga, Portugal
Keywords: Distributed Data Cube Selection, Adaptive Simulated Annealing Algorithm, Multi-Node OLAP Systems
Optimization.
Abstract: The materialization of multidimensional structur
es is a sine qua non condition of performance for OLAP
systems. Several proposals have addressed the problem of selecting the optimal set of aggregations for the
centralized OLAP approach. But the OLAP structures may also be distributed to capture the known
advantages of distributed databases. However, this approach introduces another term into the optimizing
equation: space, which generates new inter-node subcubes’ dependencies. The problem to solve is the
selection of the most appropriate cubes, but also its correct allocation. The optimizing heuristics face now
with extra complexity, hardening its searching for solutions. To address this extended problem, this paper
proposes a simulated annealing heuristic, which includes an adaptive mechanism, concerning the size of
each move of the hill climber. The results of the experimental simulation show that this algorithm is a good
solution for this kind of problem, especially when it comes to its remarkable scalability.
1 INTRODUCTION
The multidimensional vision, a main characteristic
of On-Line Analytical Processing (OLAP) systems,
makes their success. But the increasing complexity
and size of the multidimensional structures, denoted
as materialized views or subcubes, the support of a
fast query answering, independently of the
aggregation level of the required information, imply
new approaches to their optimization, beyond the
classical cube selection solutions, e.g. (Harinarayan
et al., 1996), (Gupta & Mumick, 1999), (Liang et al.
2001), using greedy heuristics, (Zhang et al., 2001),
(Lin & Kuo, 2004), using genetic approaches or in
(Kalnis et al. 2002), using randomized approaches.
One of the new solutions is the distribution of the
materialized subcubes, aiming to capture the known
advantages of database distribution: a sustained
growth of processing capacity (easy scalability)
without an exponential increase of costs, and an
increased availability of the system, as it eliminates
the dependence from a single source and avoids
bottlenecks. This distribution may be achieved in
different ways; in this paper, we focus in one of
them: distributing the OLAP cube by several nodes,
inhabiting in close or remote sites, interconnected by
communication links, generating a multi-node
OLAP approach (M-OLAP). The traditional cube
selection problem (the materialization of only the
most beneficial subcubes) is now extended, as we
have a new dimension: space. It’s not enough to
select the most beneficial subcubes; they also have
to be conveniently located. In the distributed
scenery, we have n storage and processing nodes,
named OLAP server nodes (OSN), with a known
processing power and storage space, interconnected
by a network, being able to share data or redirecting
queries to other nodes.
The authors in (Bauer & Lehn
er, 2003)
introduced the distributed aggregation lattice and
proposed a distributed node set greedy algorithm
that addressed the distributed view selection
21
Loureiro J. and Belo O. (2007).
OPTIMIZATION OF DISTRIBUTED OLAP CUBES WITH AN ADAPTIVE SIMULATED ANNEALING ALGORITHM.
In Proceedings of the Second International Conference on Software and Data Technologies - Volume ISDM/WsEHST/DC, pages 21-28
DOI: 10.5220/0001342800210028
Copyright
c
SciTePress
problem, being shown that this algorithm has a
superior performance than the corresponding
standard greedy algorithm, using a benefit per unit
space metric. But they didn’t include maintenance
costs into the general optimization cost goal and also
didn’t include communication and node processing
power parameters into the cost formulas. This
distributed lattice framework is used in (Loureiro &
Belo, 2006a), but including real communication cost
parameters and processing node power, which led to
heterogeneity in the nodes and the network. To this
modified model, several estimation cost algorithms
were proposed (Loureiro & Belo, 2006a), (Loureiro
& Belo, 2006b), which used the intrinsic parallel
nature of the distributed OLAP architecture and time
as the cost unit. Framed on this model, in (Loureiro
& Belo, 2006c), a genetic co-evolutionary approach
is applied to the selection and allocation of cubes in
M-OLAP systems, where the genotype of each
specie is mapped to the subcubes to materialize in
each node. This problem is also addressed in
(Loureiro & Belo, 2006d), using another heuristic:
discrete particle swarm optimization. Globally, the
reported tests’ results show that both genetic
(especially in its co-evolutionary version) and
swarm approaches (both normal and cooperative
versions) have low complexity (lower for the normal
Di-PSO), being shown that they have a good
scalability, supporting easily an M-OLAP
architecture with several nodes and also suited for
moderate OLAP dimensionalities. Now, we use a
simulated annealing meta-heuristic to this same
problem, but using a more comprehensive cost
model, that introduces non-linearities, a better
support to maintenance cost estimation and different
algorithms to estimate the costs, which include the
use of a pipelining approach to simulate the parallel
tasks’ execution (Loureiro & Belo, 2006b). This
new approach is expected to have a good scalability,
regarding the results referred in (Kalnis et al. 2002),
which also will be welcome in M-OLAP
architectures.
2 HILL CLIMBING WITH
SIMULATED ANNEALING
The hill climbing heuristic is simple: a hill climber
moves randomly through the search space, trying to
find good solutions to the problem, restricted only
by constraints that may be imposed to the optimizing
process. This heuristic may be improved only
allowing moves (
M
ov
+
) which improve the quality
of the solution. This is called iterative improvement
or local search. But if the hill climber falls into a
local optimum, it cannot escape from there, and the
search process ends abruptly. In (Kirkpatrick et al.,
1983) a simulated annealing meta-heuristic able to
solve this problem was proposed: the hill climber
could move to a worst place, jumping then out of the
local minimum. This trick is good, but must be
restricted, including an adaptive probabilistic
mechanism: the probability of accepting “bad”
moves (
M
ov
−
) decreases with the on-going process.
The annealing schema explores the thermodynamic
analogy of the cooling of a melted solid: T (the
temperature) controls the probability of accepting
M
ov
−
moves (and its extent). A simplified version of
the simulated annealing algorithm is shown in
Algorithm 1. As we can see, T (temperature) is a
parameter that controls the possibility of allowing
movements which degrade the solution. As Δ is the
loss of solution’s quality (in terms of the objective
function ), if Δ < 0, the new position is accepted
(the referred local search heuristic), but with a
probability
a movement with Δ > 0 (a
f
/T
e
−Δ
M
ov
−
move) will be possible, allowing the hill climber to
escape from local optima.
This probability has two immediate
consequences:
− Movements which imply low values of delta will
be admitted more often than the opposite: jumps
that imply a great loss in the solution’s quality
will have a low probability of happening.
− The value of T will be a factor which controls this
probability. Its value controls the exploration
versus exploitation trade-off: for the same delta’s
value, a high T implies a higher probability of
accepting moves which imply a higher
degradation of the quality’s solution (accepting
worst moves) and conversely.
Simulated Annealing Meta-Heuristic
Select a initial solution and an initial temperature
T
s
0
>0
Begin
0
TT
←
←
best
While not achieved stop criterion
s
0
←
's
solution in the neighbourhood of
s
Δ
←−() (')fs fs
// f(s) defines the quality of s
if
0
Δ
<
then
←
's
// the new solution is better
s
−Δ
fs
else if
e
> rnd[0,1) then
ss
/T
← '
if
fs
then
ss
>() ( )
best
←
best
TT*
α
←
WhileEnd
Return
s
best
End
Algorithm 1: Simulated annealing meta-heuristic.
ICSOFT 2007 - International Conference on Software and Data Technologies
22

This way, a high initial T value allows the hill
climber to escape from local o
ptima. However, if T
remains the same for all the search process, the algorithm
will keep the exploration, without seeking for a deep
inspection in a particular region, what would be achieved
if the probability of accepting
M
ov
−
moves was low. We
face then with two conflicting objectives. But if T had
initially a high value which would decrease until a low
value, the algorithm would have an initial phase where the
exploration was favored, being the situation reversed at
the end of the process, where almost (or even only) the
exploitation was allowed. In fact, as T decreases with the
iteration’s number, when T approaches zero, the
probability of accepting
M
ov
−
moves almost reaches 0:
. Summarizing, T is set at an initial
high value T
/
0
T
Te
−Δ
→⇒ →0
0
. After a pre-defined iterations’ number, it is
reduced by an
α
factor,
1nn
T
−
, being
01
*T
α
←
α
<
<
.
Other cooling mechanisms were possible, e.g. 1)
decreasing T by a constant value, after a pre-defined
number of iterations or 2) even the decreasing value could
be successively lower as the end of the search process
approached.
3 PROBLEM DEFINITION AND
ALGORITHM’S APPLYING
The problem that we must solve may be defined like
this:
Definition 1: Selection and allocation of
distributed M problem. Let Q={q
1
, …, q
n
} be a set of
queries with access frequencies {fq
1
, …, fq
n
}, query
extension {qe
1
,…,qe
n
}; let update frequency and
extension be {fu
1
, …, fu
n
} and {ue
1
,…,ue
n
},
respectively, and let S
Ni
be the amount of
materializing space by OLAP node i. A solution to
the selection and allocation problem is a set of
subcubes M={s
1
,…,s
n
} with a constraint,
where
is the materializing space of all subcubes S
j
in node
N
i
, so that the total costs of answering all queries Q
and maintaining M, Cq(Q, M)+Cm(M) are minimal.
To use the simulated annealing meta-heuristic we
must, as we can see, referring to Algorithm 1:
1. find a way to code the problem;
2. generate the initial position of all hill climbers;
3. define the neighborhood of any position s;
4. define the hill climber’s movement scheme;
5. know how to evaluate the quality of each
solution (delta computing);
6. define and
0
T
α
(or any other cooling
mechanism).
Figure 1 shows a functional presentation of Hill
Climber with Simulated Annealing M-OLAP (HC-
SA M-OLAP) algorithm.
Concerning to the first referred issue, as we have
a space paradigm of the solutions, we must map
each possible M into the position of a hill climber.
As M may have a maximal number of subcubes
nS=n.Ls (where n is the number of OSNs and Ls is
the number of subcubes into the lattice), we must
have a multidimensional space of d=nS dimensions,
being each dimension mapped to a possible subcube
in M (in right lower corner of Figure 1, we have
shown the multidimensional space for a node with 8
possible subcubes). A position=1 for a dimension d
i
,
means that the corresponding subcube in M is
materialized and conversely. E.g., in Figure 1,
subcube S0 is mapped into the X dimension: as S0 is
materialized, the HC is at a 1 position. Summarizing,
as the search space has d dimensions, the position of
the hill climber is coded by a binary string where
each bit is then mapped to a subcube that may be (or
not) materialized into each node.
Relating to the second issue, as for the
generation of the initial genome in genetic
algorithms or the generation of the initial position of
a particle in particle swarm algorithms that we tested
in other research works, we opted for the random
generation of the initial position of each hill climber.
Concerning to the definition of the neighborhood
of a given position, as , any other
sM=
''sMM
=
≠ will be a new solution in the ’s
neighborhood. We may define a maximal Hamming
distance, mhd, which will limit the range of the
move of each step for any hill climber. Viewing this
scheme under the spatial paradigm, this will imply
that each journey of the HC is limited to a given
maximal range. In terms of the problem to solve, this
implies that the number of subcubes to dematerialize
or materialize in each iteration is limited and may be
changed, by specifying a different value.
s
The forth item, the hill climber’s movement
scheme (shown in the second round cornered
rectangle of Figure 1), is directly related to the
former definition of neighborhood: in each iteration
the dematerialization of dsc subcubes is allowed,
min
, as is the rematerialization of rsc
subcubes
min max
rdh rsc rdh
max
ddh dsc ddh≤≤
≤
≤
, selecting both values
randomly inside the specified interval. Once again,
the balance of the relation exploration versus
exploitation is changed along the search process, by
decreasing dsc and rsc range (at each fudri – update
frequency of dematerialization and rematerialization
interval). In practice, the algorithm randomly selects
a node and subcube to dematerialize, changing the
corresponding position of the HC from 1 to 0. This
operation is repeated dsc times, as long as there are
subcubes to dematerialize.
||
ii
jN N
j
sS≤
∑
||
i
jN
j
s
∑
OPTIMIZATION OF DISTRIBUTED OLAP CUBES WITH AN ADAPTIVE SIMULATED ANNEALING
ALGORITHM
23
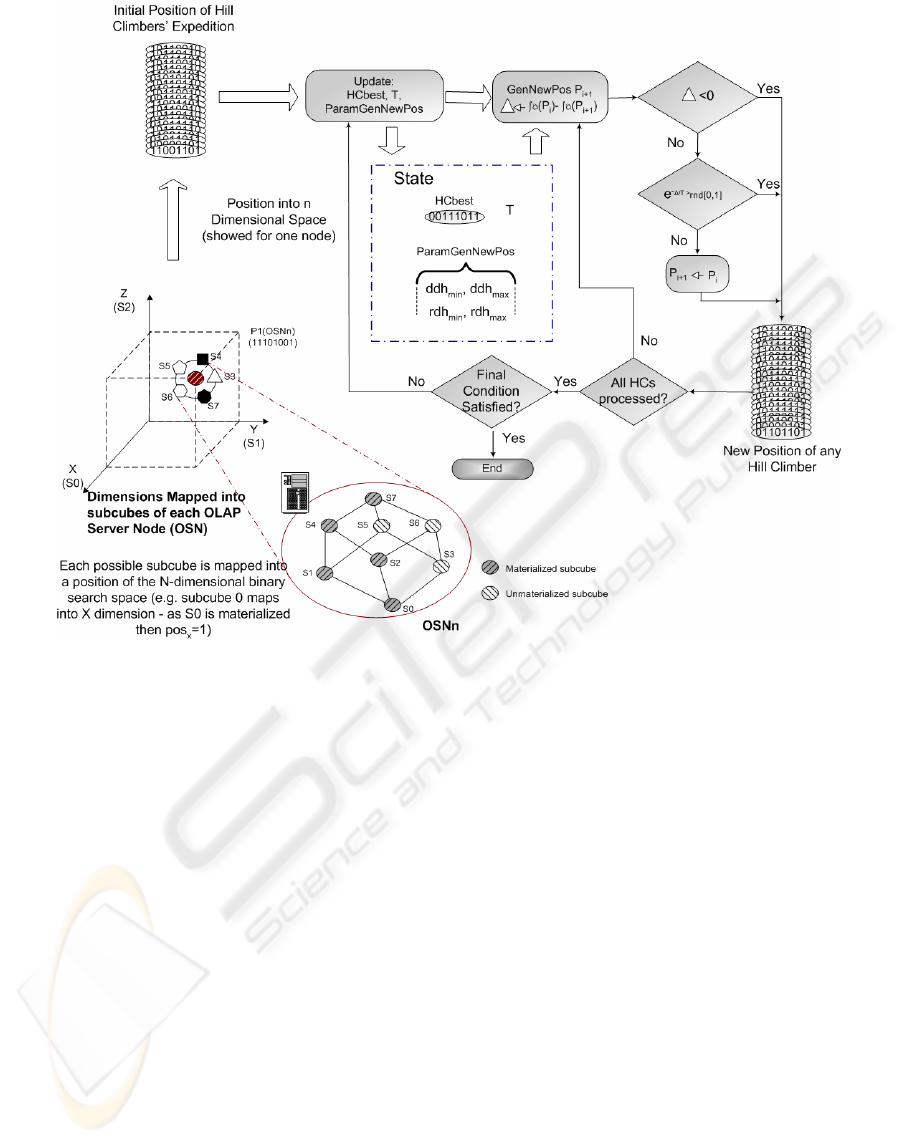
Figure 1: Functional scheme of HC-SA M-OLAP algorithm.
The process of rematerialization is made in an
identical way. The algorithm selects randomly a
dimension where the HC is at a 0 position and
changes its position to 1. In practice, the
corresponding subcube is materialized. All
parameters concerning this issue are user specified,
allowing the tuning of the algorithm.
Concerning to the fifth issue, the fitness function
(fa) of Figure 1, referring to definition 1, the
objective function is the minimizing of Cq(Q,
M)+Cm(M). We used the algorithms Multipipelining
Parallel Query Cost Calculation Algorithm with
Node Allocation by Constrained Reordering (PQA)
(Loureiro & Belo, 2006b) and Two Phase
Hierarchical Sequence with Multipipelining Parallel
Processing (2PHSMPP) (Loureiro & Belo, 2006b)
for estimating query and maintenance costs,
respectively.
Finally, for
0
T
and the cooling mechanism, we
decided for its setting by the user, implying a
preliminary tuning, having adopted a type 1 cooling
mechanism (as referred in section 2).
4 HC-SA M-OLAP ALGORITHM
Algorithm 2 presents the formal definition of the
proposed algorithm. As we can see, it uses the
solutions for the issues described in the last section.
The algorithm is divided into four main sections:
1. the initialization of parameters and objects, e.g.
the expedition of HCs;
2. the generation of the initial position of each HC,
its repairing to obey to the space constraint, the
computing of its fitness and the display of the
state;
3. the iterative module, where the moves of the HCs
are performed, as well as the evaluation of its
fitness, the updating of move’s control
parameters and the display of the state;
4. the returning of the best solution achieved.
Given the comments included, the algorithm
auto-explainable, and then we choose not to add any
further discussion. Among all rules, we highlighted
the one which accepts or rejects the movement of the
HC and the one which implements the movement.
ICSOFT 2007 - International Conference on Software and Data Technologies
24
Algorithm 2. HC-SA M-OLAP algorithm.
As we apply a per node space constraint, the hill
climbers’ moves may produce invalid solutions, as
when the materializing space is higher than the
maximal allowed space. In this work, we employ a
repair method, with the reposition of the HC by
randomly turning 1 positions to 0 until the HC’s
proposal is valid.
Input: L // Lattice (all granularity’s combinations and subcubes’ dependencies)
S=(S
1
... S
n
.) ; Q=(Q
1
... Q
n
) // Max. storage nodes’ space, query set (freq., dist.)
Pb // Base Parameters: Tf (type of Hc fixing), nOSN (number of OSNs),
MaximalSizeMaintWindow
Psa // Parameters of simulated annealing algorithm (NumHC, NumIter,
DefMovim, T
0
, α, tpGerac)
Mt // maintenance costs’ dependencies
P=(P
1
... P
n
.); X=(X
1
... X
n
.) // Nodes’ processing power; connections’ param.
Output: M // Materialized subcubes selected and allocated
Begin
1. Initialization:
M← { c
0
} // initialize with all empty nodes; node 0 has the base virtual relation
E← { }; d← NSCubes * nOSN // HC’ expedit. empty; d=dim. of search space
2. Generation, repairing, evaluation and showing the state of the initial HC’
expedit.
Repeat NumHC Times: // NumHC is the number of HCs of the expedition
While (MaintCost(hc))>MaximalSizeMaintWindow Do: // while position of
// generated hill climber (HC) doesn’t satisfy the maintenance constraint
hc ← GenerateHC(d) // generates the HC into a random position in d
For Each n Into MOLAP, Do: // for each OSN in MOLAP architecture
If (size(pos(hc),n)) >S
n
Then // if size of materialized subcubes proposed
// by solution of HC for node n > available mat. space in node n (S
n
)
Reposition(hc); // relocate HC into the dimensions mapped to node n
// to observe the space constraint
Next n
End While
E ←E
∪
hc; // add the hill climber to the expedition
fitness(hc)= f (hc, Q, M, X);
If fitness(hc)>hcBest Then hcBest ←fitness(hc); // updates hcBest (not really
// necessary, but interesting to show the initial best position)
End Repeat
ShowState(E); // shows the instant state of all hill climbers and hcBest
3. Expedition’s movement, fitness evaluation of each solution and state show:
Iter ←0; // iterations counter
While (Itr < NumIter) Do: // final condition is the number of iterations
T ← update (T); // T varies from T
0
until T→ 0 at each fuT iterations;
If iter>frozenI OR T<frozenT Then frozen ← true; // after frozenI
// iterations or when T is lower than a given value, the system is frozen
interv_Max_Unmat ←update(interv_Max_UnMat); // updates maximal
// number of bits which represent the position of each HC that was allowed
// to change from 1 to 0 in each iteration
intervMaxRemat ←update(intervMaxRemat) ; // updates maximal number of
// bits which represent the position of each HC that was allowed to change
// from 0 to 1 in each iteration
wU←rnd(interv_Max_UnMat); // generates the number of bits
// to change from 1 to 0 (un-materialize)
wR←rnd(interv_Max_ReMat); // generates the number of bits
// to change from 0 to 1 (materialize corresponding subcubes)
// Moves each HC according to the defined movement scheme
For Each hc Into E, Do:
While (MaintCost(hc))>MaximalSizeMaintWindow Do: // while new
// position of HC doesn’t verify the maintenance cost constraint
Repeat wU Times: // un-materilize wU sbcubes (changing bits - 1 to 0)
d ← select (D); // randomly selects node and subcube to un-materialize
hc(d) ← 0; // turns the bit (which represents the HC’s position) - 1 to 0
End Repeat
Repeat wR Times: // rematerilize wR sbcubes (changing bits - 0 to 1)
d ← select (D);// selects node and subcube to un-materialize with a
// prob. proportional to the available space into each node or to the
// relation available space x total space of each node; the subcube to
// rematerialize cannot imply the break of imposed space constraint
hc(d) ← 1; // turns the bit (which represents the HC’s pos. from 0 to 1)
End Repeat
End While
// Accepting or rejecting HC’s movement
delta ← f (hc (iter-1), Q, M, X) – f (hc (iter), Q, M, X); // computes the
// delta (loss of quality) concerning to HC movement,
// f is the fitness function
If delta > 0 AND frozen=true OR delta > 0 AND rnd([0,1))>e
-Δ/T
Then
hc(iter) ← hc(iter-1); // restore prev. pos. of the HC, reject. the new pos.
fitness(hc)= f (hc, Q, M, X);
If fitness(hc)>hcBest Then hcBest ←fitness(hc); // updates hcBest
Next hc;
ShowState(E); // shows the instant state of all hill climbers and hcBest
iter ← iter ++; // increments iterations’ counter
End While
4. Returning of result:
Return M(hcBest) // ret. M corresp. to the best posit. ever achieved by any HC
End
5 EXPERIMENTAL
PERFORMANCE STUDY
To perform the experimental study of the algorithms
we used the test set of Benchmark’s TPC-R (TPC-
R), selecting the smallest database (1 GB), from
which we used 3 dimensions (customer, product and
supplier). To broaden the variety of subcubes, we
added additional attributes to each dimension,
generating hierarchies, as follows: customer (c-n-r-
all); product (p-t-all) and (p-s-all); supplier (s-n-r-
all). Whenever the virtual subcube (base relation) is
scanned, this has a cost three times the subcube of
lower granularity.
We have used a 3 and 6 nodes’ M-OLAP
architecture (plus the base node), several randomly
generated query sets (of different sizes), and we
considered incremental maintenance costs. With this
environment we intend to evaluate the impact of the
following parameters onto the algorithm’s
performance: 1) the number of iterations, 2) the
value of T, 3) the number of HCs, 4) the number of
queries, and 5) the scalability of the algorithm
relating to the number of M-OLAP architecture’s
nodes. Given the stochastic nature of the algorithms,
all presented values are the average of 10 runs.
5.1 Parameters Tuning
Several preliminary tests were performed to tune
some parameters, whose selected values are shown
in Table 1. Other parameters, as fudri, the frequency
of T updating, and the iteration of the freezing of the
simulated annealing (when the simulated annealing
mechanism stops acting, thus the algorithm starts
behaving like a local search algorithm), are changed
accordingly to the selected values, for the associated
parameters. To make things clear, in this table, all
parameters are described.
As said above, the balance of the relation
exploration versus exploitation is changed along the
search process, by decreasing dsc and rsc range (at
each fudri – update frequency of dematerialization
and rematerialization interval). Reducing the range
of each HC’s journey with the running of the
algorithm implies that, in the beginning, the
exploration is favored; in opposite, in the later
OPTIMIZATION OF DISTRIBUTED OLAP CUBES WITH AN ADAPTIVE SIMULATED ANNEALING
ALGORITHM
25

phases, the same is valid for the exploitation (as the
range of the search is lower).
Table 1: Specified values for several parameters of HC-SA
M-OLAP algorithm.
Parameter Description Value
ddh
min
minimal number of
subcubes to dematerialize
4
ddh
max
maximal number of
subcubes to dematerialize
9
rdh
min
minimal number of
subcubes to rematerialize
3
rdh
max
maximal number of
subcubes to rematerialize
8
DecrD
the decrease of
ddh
min
and
ddh
max
1
DecrR
the decrease of r
dh
min
and
r
dh
max
1
InitPosGen
the way of generating the
initial position of each hill
climber
Random
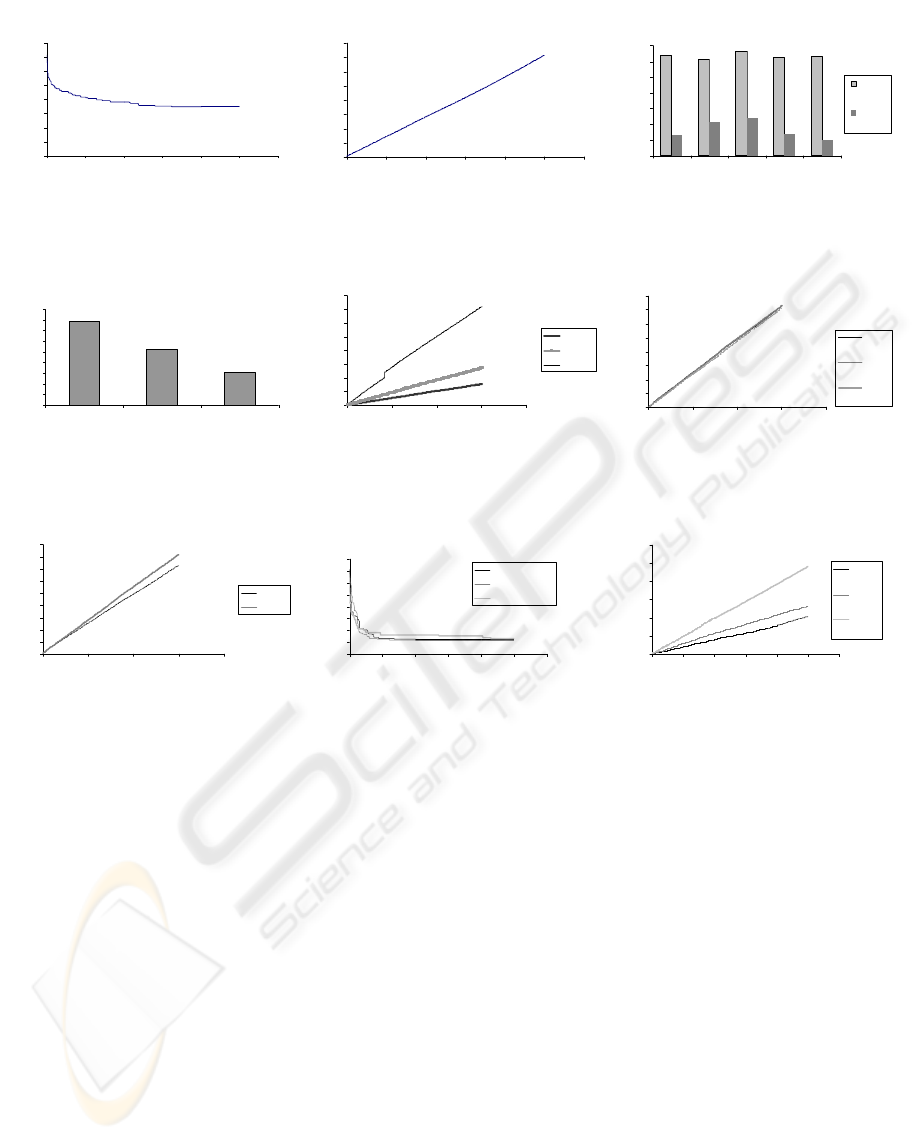
5.2 Performed Tests
The first test tries to evaluate the impact of the
number of iterations over the quality of the achieved
solutions and also on the run-time of the algorithm.
We used 20 HCs and T
0
=30. Figure 2-a shows the
evolution of the quality of the solutions proposed by
the algorithm. As we can see, the quality of the
solutions has an initial fast improvement till about
100 iterations, followed by a slower evolution and
an almost null improvement beyond 300 iterations.
Moreover, another test, where 1000 iterations were
allowed, revealed a small improvement of the
quality of the solutions (3435 sec. for 500 iterations
versus 3411 sec. for 1000 iterations). Moreover, as
there is a linear relation between the number of
iterations and the run-time execution (as we can see
in Figure 2-b), the increase of the run-time doesn’t
pay off.
With the second test we tried to evaluate the
impact of the initial T
0
value over the quality of the
solutions. We used a limit of 300 iterations
(according to the conclusions of the last test). The
results are shown in Figure 2-c. As we can see, we
may say that the algorithm’s performance is almost
independent of T
0
(a difference of 1.2% on average
fitness and 4% for final fitness). Also, the plots don’t
allow deducing a behavior pattern, as they exhibit a
non monotonic variation. Watching the plots and
inspecting the relative values for the final solution’s
quality and its average, the value T
0
=30 seems to be
the one that ensures a better trade-off. Then, we
adopted this value for the remaining tests.
Another characteristic that is important to
evaluate, concerning to the algorithm’s behavior, is
the impact of the HCs’ number on the quality of the
achieved solutions and on the run-time. The plots of
Figure 2-d and 2-e show the obtained results. As we
can see, the plot of Figure 2-d shows that the number
of HCs has a reduced impact on the quality of the
achieved solutions (only 2.7 %). This is something
that was expected, given the absence of any
competition or cooperation mechanisms. E.g.
genetic algorithms are based on struggle for survival
and genoma diversity is a condition for evolution.
Also the learning process – through Pbest and Gbest
– which rules the particles’ dynamics in particles
swarm algorithm optimization, or stigmergy, in ants
algorithms, need a population of solutions. Here,
each HC acts independently of any other and there
isn’t any learning process. On the other side,
analyzing the plot of Figure 2-e, it is easy to
understand that there is an almost linear increase of
run-time with the HCs’ number. These two
evidences allowed us to conclude that it is
interesting to keep a low number of HCs, which
induces good solutions in a substantially inferior
time.
Finally, it is mandatory, as scalability is at
premium (recall the algorithm’s use to the M-OLAP
architecture), to evaluate the impact of the number
of queries and especially the nodes’ number (as we
are using the algorithm for optimizing an M-OLAP
system) on the run-time of the algorithm.
This way, for the first case, we used sets with 30,
60 and 90 queries, randomly generated. The run-
times are shown in plot of Figure 2-f. Observing this
plot, we may see that there is an almost null
dependency of the run-time in face of the number of
queries (the three lines are almost superposed). Also
observing Figure 2-g, we may see that an increase of
3 to 6 nodes in the M-OLAP architecture’s has
motivated a reduced increase of the run-time: for the
300 iterations there was only an increase of 10.6%.
These two observations show that the HC-SA M-
OLAP algorithm evidences a very good scalability,
being capable to deal with many queries and also
with M-OLAP architectures with many nodes.
Adding the easy scalability of hill climbing with the
simulated annealing, algorithm concerning to the
cube’s dimensionality (Kalnis et al. 2002), we have
an algorithm capable to scale in all directions.
ICSOFT 2007 - International Conference on Software and Data Technologies
26
Fitness Evolution
0
1000
2000
3000
4000
5000
6000
7000
8000
0 100 200 300 400 500 600
Iteration
Cost (s)
Run-Time
0
200
400
600
800
1000
1200
1400
1600
0 100 200 300 400 500 600
Iteration
Time (s)
Average and Final Fitness for Several T
0
Values
3400
3500
3600
3700
3800
3900
4000
4100
510203050
T
0
value
Cost (s)
Average
Fitness
Final
Fitness
(a) (b) (c)
Hill Climbers' Number Impact on the Quality of
the Achieved Solutions
3380
3400
3420
3440
3460
3480
3500
3520
3540
3560
20 40 100
Hill Climbers' Number
Cost
Hill Climbers' Number Impact on the Run-Time
0
500
1000
1500
2000
2500
3000
3500
4000
0 100 200 300 400
Iteration
Run-Time (s)
20 HCs
40 HCs
100 HCs
Queries' Number Impact on the Run-Time
0
100
200
300
400
500
600
700
800
0 100 200 300 400
Iteration
Run-Time (s)
30
Querie
s
60
Querie
s
90
Querie
s
(d) (e) (f)
Nodes' Number Impact on the Run-Time
0
100
200
300
400
500
600
700
800
900
0 100 200 300 400
Iteration
Run-Time (s)
3 OS Ns
6 OS Ns
HC-SA M-OLAP x Di-PSO M-OLAP x Ga M-OLAP
Algorithms Solution's Quality
4000
5000
6000
7000
8000
9000
10000
11000
12000
0 100 200 300 400 500 600
Iteration
Costs
HC-SA M-OLAP
Di-PSO M-OLAP
GA-P M-OLAP
Algorithms' Run-Time
0
1000
2000
3000
4000
5000
6000
0 100 200 300 400 500 600
Iteration
Run-Time (s)
HC-SA
M-OLAP
Di-PSO
M-OLAP
GA-P M
-
OLAP
(g) (h) (i)
Figure 2: Plots that show the results of the performed tests.
6 CONCLUSIONS AND FUTURE
WORK
This work proposes an adaptive simulated annealing
algorithm to optimize the selection and allocation of
a distributed cube for multi-node OLAP systems.
This algorithm improves existent proposals in three
distinct ways: 1) it uses a non-linear cost model to
support the estimation of the fitness of each solution,
simulating a parallel execution of tasks (using the
inherent parallelism of the M-OLAP architecture)
which deals with real world parameter values,
concerning to nodes, communication networks and
the measure value – time (Loureiro & Belo, 2006b);
2) it includes the maintenance cost into the cost
equation to minimize; 3) it also introduces simulated
annealing meta-heuristic onto the distributed OLAP
cube selection problem, extending the work of
(Kalnis et al. 2002) into the distributed arena. Also
concerning to this work, the HC-SA M-OLAP
algorithm includes a mechanism which dynamically
reduces the range of searched space in each iteration.
The run-time execution results show an easy
scalability of HC-SA M-OLAP in both directions:
the cube’s complexity and the number of nodes,
allowing to manage a distributed OLAP system,
capitalizing the advantages of computing and data
distribution, with light administration costs.
Also, observing the results of figure 3-h, the HC-
SA M-OLAP algorithm is competitive face to
standard genetic and particle swarm optimization
algorithms for this kind of problem. Moreover,
figure 3-i shows that the absolute run-time was also
the shortest of the three tested algorithms.
OPTIMIZATION OF DISTRIBUTED OLAP CUBES WITH AN ADAPTIVE SIMULATED ANNEALING
ALGORITHM
27

In the near future we intend to include this
algorithm into a general framework which includes
also a genetic, a co-evolutionary and a discrete
particle swarm algorithms. Any of these algorithms
may be used in its individuality or combined, where
each search agent may assume one of several forms
(a particle, an individual or a hill climber), switching
through a metamorphosis process. This mechanism
is also life inspired, as, in nature, the individuals of
many species assume different shapes in their
phenotype in different life epochs or under different
environmental conditions. Between each phenotypic
appearance many transformations occur, during the
so called metamorphosis, which many times
generates a totally different living being. Assuming
completely different shapes seems to be a way for
the living being to have a better global adaptation,
changing its ways to a particular sub-purpose. E.g.
for the butterflies, the larva state seems to be ideal
for feeding and growing; the butterfly seems to be
perfectly adapted to offspring generating, especially
increasing the probability of diverse mating and
colonization of completely new environments (recall
the spatial range that a worm could run and the
space that a butterfly could reach and search). But
all these states contribute to the main purpose:
struggle for survival.
While designing this algorithm and keeping in
mind some knowledge about each meta-heuristics’
virtues and limitations that are somewhat disjoint,
we figured that, if combined, they may generate a
globally better algorithm. What is more, this schema
could be easily implemented as a unified algorithm
because of the similarities between the solutions’
evaluation scheme and the easy transposing of
solutions’ mapping. This new meta-heuristic may be
denoted as “metamorphosis algorithm”, which is
expected to have an auto-adaptation mechanism.
ACKNOWLEDGEMENTS
The work of Jorge Loureiro was supported by a
grant from PRODEP III, acção 5.3 – Formação
Avançada no Ensino Superior, Concurso N.º
02/PRODEP/2003.
REFERENCES
Bauer, A., and Lehner, W., 2003. On Solving the View
Selection Problem in Distributed Data Warehouse
Architectures. In Proceedings of the 15th International
Conference on Scientific and Statistical Database
Management (SSDBM’03), IEEE, pp. 43-51.
Gupta, H. and Mumick, I.S., 1999. Selection of Views to
Materialize under a Maintenance-Time Constraint. In
Proc. of the International Conference on Database
Theory.
Harinarayan, V., A. Rajaraman, and J. Ullman, 1996.
Implementing Data Cubes Efficiently. In Proceedings
of ACM SIGMOD, Montreal, Canada, pp. 205-216.
Kalnis, P., Mamoulis, N., and D. Papadias, 2002. View
Selection Using Randomized Search. In Data
Knowledge Engineering, vol. 42, number 1, pp. 89-
111.
Kirkpatrick, S, Gelatt, C. D. and Vecchi, M. P., 1983.
Optimization by Simulated Annealing. Science, vol.
220, pp. 671-680, 1983.
Liang, W., Wang, H., and Orlowska, M.E., 2001.
Materialized View Selection under the Maintenance
Cost Constraint. In Data and Knowledge Engineering,
37(2) (2001), pp. 203-216.
Lin, W.-Y., and Kuo, I.-C., 2004. A Genetic Selection
Algorithm for OLAP Data Cubes. In Knowledge and
Information Systems, Volume 6, Number 1, Springer-
Verlag London Ltd., pp. 83-102.
Loureiro, J., and Belo, O., 2006a. Evaluating Maintenance
Cost Computing Algorithms for Multi-Node OLAP
Systems. In Proceedings of the XI Conference on
Software Engineering and Databases, Sitges,
Barcelona, October 3-6, 2006.
Loureiro, J., and Belo, O., 2006b. Establishing more
Suitable Distributed Plans for MultiNode-OLAP
Systems. In Proceedings of the 2006 IEEE
International Conference on Systems, Man, and
Cybernetics, Taipei, Taiwan, October 8-11, pp. 3573-
3578.
Loureiro, J. and Belo, O, 2006c. An Evolutionary
Approach to the Selection and Allocation of
Distributed Cubes. In Proceedings of the 2006
International Database Engineering & Applications
Symposium (IDEAS2006), Delhi, India, December 11-
14, 2006.
Loureiro, J. and Belo, O., 2006d. Swarm Intelligence in
Cube Selection and Allocation for Multi-Node OLAP
Systems. To appear in Proceedings of the 2006
International Conference on Systems, Computing
Sciences and Software Engineering (SCSS 06).
Transaction Processing Performance Council (TPC): TPC
Benchmark R (decision support) Standard
Specification Revision 2.1.0. tpcr_2.1.0.pdf, available
at
http://www.tpc.org.
Zhang, C., Yao, X., and Yang, J., 2001. An Evolutionary
Approach to Materialized Views Selection in a Data
Warehouse Environment. In IEEE Trans. on Systems,
Man and Cybernetics, Part C, Vol. 31, n. 3.
ICSOFT 2007 - International Conference on Software and Data Technologies
28
