
MATHEMATICAL FRAMEWORK FOR
GENERALIZATION AND INSTANTIATION OF KNOWLEDGE
Marek Reformat
thinkS
2
: thinking Software and System laboratory
Electrical and Computer Engineering, University of Alberta
ECERF Building W6-023, 9107-116 Street, Edmonton, Alberta, Canada, T6G 2V4
Keywords:
Knowledge representation, protoforms, instances, category theory, fibration, abstract data types.
Abstract:
Templates, patterns, and blueprints are constructs that humans use to represent highly abstract knowledge.
Quality of such processes as reasoning, speaking, running, and driving depends on people’s abilities to process
these constructs. Recently, they have been named protoforms. On the other hand, concrete pieces of knowledge
can be seen as instances of the protoforms.
A very important task is to find mechanisms that will be able to organize and control protoforms and their
instances. They would provide methods for defining properties of protoforms and their instances, describing
their interactions, and controling ways how they can be merged. The paper describes a concept of applying
category theory to describe protoforms and their instances in a more formal way.
1 INTRODUCTION
The fundamental goal of knowledge representation
is to prepare an environment suitable for performing
analysis and processing of represented knowledge.
Zadeh’s (Zadeh, 2002) observation is that humans use
patterns representing different aspects of everyday ac-
tivities, such as building sentences, and making de-
cisions. To generalize this observation, Zadeh intro-
duced the concept of protoforms (prototypical forms).
They represent a wide range of concepts, procedures,
and schemes related to different activities.
At the time when protoforms represent a general-
ized knowledge, a specific pieces of knowledge are
instances of protoforms. A single protoform together
with its instances can be related to other protoform
and their instances. In general we can talk about a net-
work of ”relations” among different protoforms and
instances.
Category theory (Barr and Wells, 1999) is a disci-
pline of mathematics dedicated to the theory of struc-
tures – it deals with structures and relationships be-
tween them in an abstract way. The basic elements of
category theory are objects and morphisms (arrows).
Category theory focuses on relations that exist among
objects, it tries to describe objects via their interac-
tions with an environment and among themselves.
In the paper, a mathematical scheme for analysis
and inference about protoforms and their instances is
described. The categories Protoforms and Instances
are defined. Each object of the category Protoforms
is a single protoform represented as an algebraic sig-
nature containing a set of types, and a set of opera-
tions over those types. In this category, morphisms
are ”relations” that translate the vocabulary (types)
and operations of one signature (protoform) into the
vocabulary and operations of another. Objects of the
category Instances are instances (individuals) build
on protoforms. Relations among objects of both cat-
egories, i.e., Protoforms and Instances, are defined
by special relations called fibrations. This means that
instances are fibers built over protoforms.
2 PROTOFORMS
The concept of protoforms, introduced by Zadeh in
(Zadeh, 2002), represents an interesting idea of gener-
alization. A protoform – a short of prototype form – is
defined as ”an abstracted summary”. The protoform
is a symbolic expression defining a construct - a con-
cept, proposition, command, question, scenario, case,
249
Reformat M. (2007).
MATHEMATICAL FRAMEWORK FOR GENERALIZATION AND INSTANTIATION OF KNOWLEDGE.
In Proceedings of the Second International Conference on Software and Data Technologies - PL/DPS/KE/WsMUSE, pages 249-254
DOI: 10.5220/0001344802490254
Copyright
c
SciTePress

or a system of such constructs. It has been already
shown that protoforms have a universal character, and
are useful for building intelligent systems (Kacprzyk
and Zadrozny, 2005) (Yager, 2006).
Example: One of the simplest protoforms are con-
cepts. A concept car is such an example. This proto-
form identifies components of a car, and ”relations”
between them. There are many concepts related to
car, for example racing car, sport utility car, and all
of them constitute a network of concepts.
Example: Another portoform can be a single propo-
sition V is B, where V is a variable, and B is a subset
indicating the allowable values for the variable. This
protoform can be a building block of more complex
protoforms (Yager, 2006).
Example: Protoforms can be also used to represent
database query summaries (Kacprzyk and Zadrozny,
2005). In this case, a query summary such as Most
records meeting conditions B match query S can be
represented by a profotorm: Most BRs are S, where
R means records, B is a filter, and S is a query. Ev-
idently, as protoforms may form a hierarchy, higher
level (more abstract) protoforms can be defined, for
instance replacing most by a general linguistic quan-
tifier Q: QBRs are S.
3 CATEGORY THEORY
3.1 Basics of Category Theory
Category theory (Barr and Wells, 1999) is a branch
of mathematics that deals with structures and rela-
tionships among them. The structures are called ob-
jects and a relationship between two objects is called
a morphism. The essence of category theory, as stated
in (Fiadeiro, 2005), is that category theory character-
izes objects in terms of their ”social life”. This so-
cial life represents interaction of objects among them-
selves and their universe (environment).
Due to the space limitation we do not provide def-
initions of basic concepts of category theory, such as
category, morphism, functor, and universal construc-
tions (for example, pushouts). Definitions of these
concepts can be found in any category theory book,
for example (Jacobs, 2001).
3.2 Fibrations
Special types of functors, that define relationships
that exists among objects that belong to two differ-
ent categories, are called fibrations (Barr and Wells,
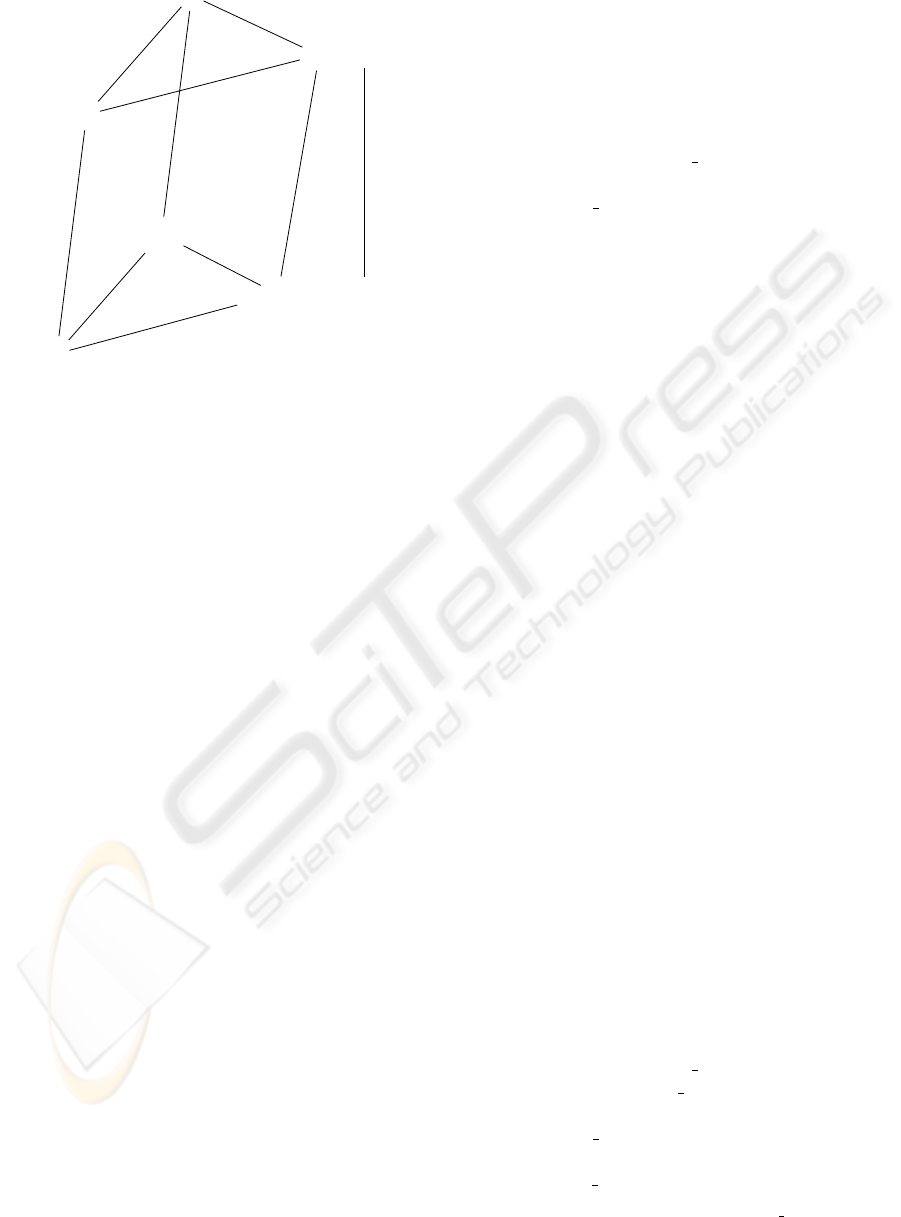
1999). A fibration is designed to capture collections
ϕ
−1
(i) ϕ
−1
( j)
X
i
?
j
?
I
ϕ
?
Figure 1: Fibers over i and j (each box represents a set of
objects X that are mapped into i and j respectively.
of categories varying over a base category. An exam-
ple can be collections of sets (X
i
)
i∈I
varying over a
base, or index, set I, Fig. 1. Let’s consider a functor
ϕ : X → I . The sets in the category X appear as
fibers over elements/objects of category I
ϕ
−1
(i) = {x ∈ X|ϕ(x) = i}
for each i ∈ I . In other words, a fiber is a collec-
tion of items of one category that can be mapped (via
fibration) into a single element (object) of another cat-
egory.
A formal definition of fibration is based on the
concept of cartesian morphisms
1
.
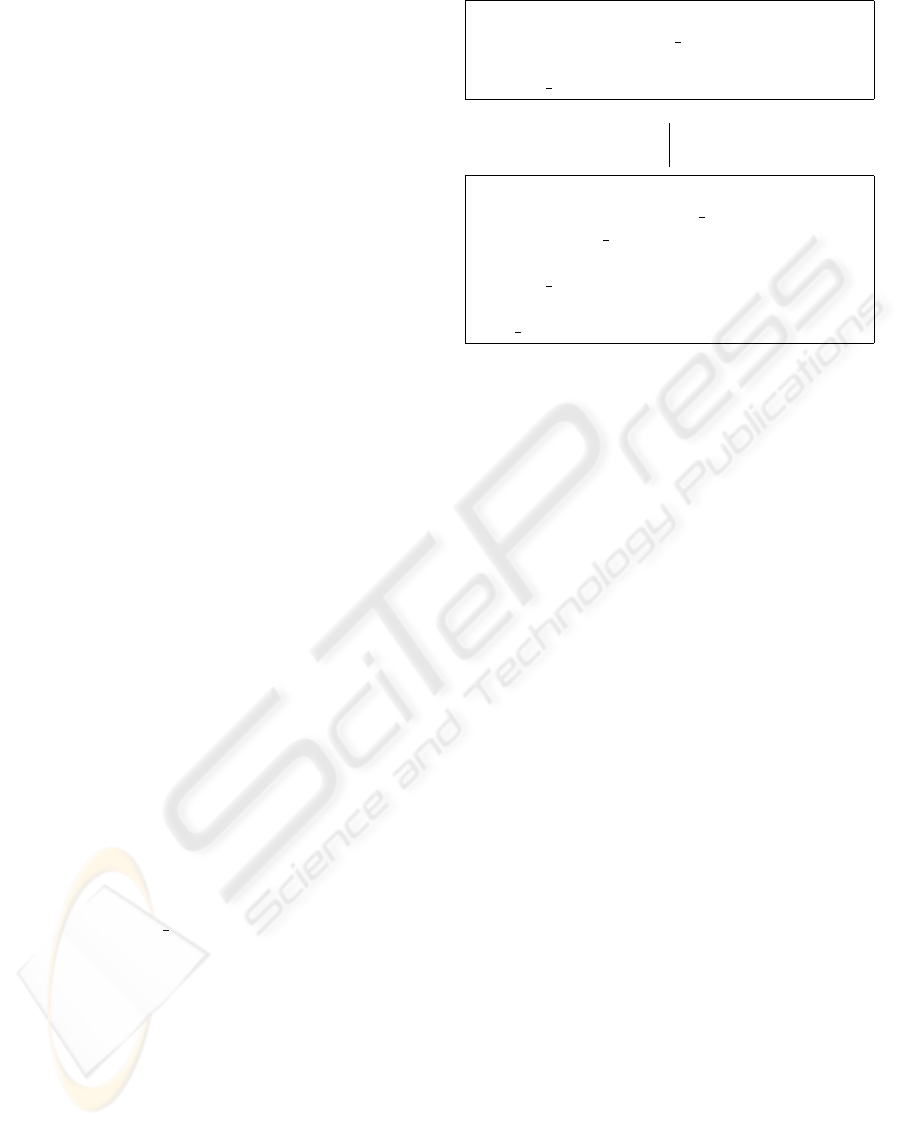
Definition 1 Let P : E → C be a functor between
categories, let f : C → D be an arrow of C , and let
P(Y) = D. An arrow u : X → Y of E is cartesian for
f and Y if (see Fig. 2 for a graphical representation):
• P(u) = f
• for any arrow v : Z → Y of E and any arrow h :
P(Z) → C of C for which f ◦ h = P(v), there is a
unique w : Z → X in E for which u ◦ w = v and
P(w) = h.
Definition 2 A functor P : E → C is a fibration if
there is a cartesian arrow for every f : C → D in C
and every object Y in E for which P(Y) = D.
If P : E → C is a fibration, one also says that E is
fibered over C . In that case, C is the base category
and E is the total category of the fibration. Some
authors represent a fibration vertically:
E
↓
C
This way of representing a fibration is very intuitive.
1
There is also a dual concept to fibration called cofibra-
tion or opfibration. We skip the formal definition of opfi-
bration, but elements of opcartesian (dual to cartesian) mor-
phism are used in Section 7 to illustrate benefits of the ap-
proach we proposed in the paper.
ICSOFT 2007 - International Conference on Software and Data Technologies
250
Z
Y
v
-
E
X
w
u
-
P(Z)
P(Y)=D
P(v)
-
C
P
?
C
h = P(w)
f
-
Figure 2: Formal definition of a fibration (objects X, Y, Z are
of E , and C, P(Z), P(Y)=D of C ).
4 ALGEBRAIC
REPRESENTATION
4.1 Abstract Data Types and Signatures
An abstract data type (ADT) is a mathematical speci-
fication of data and operations that can be performed
on the data. An ADT is created by identifying types
of data that become its elements, and providing in-
formation about operations that can be performed on
these identified types of data. The only information
is a name of operation, its domain and co-domain.
The actual implementation, i.e., values of the identi-
fied types and the results of operations on these values
are not defined.
The technique of algebraic specification of ab-
stract data types can be introduced informally by
defining the concept of signature, called also an al-
gebraic signature. The signature defines types of data
that are used by the abstract data type, and a set of
operations. Its formal definition is shown below.
Definition 3 A signature SIG = (T, OP) consists
• T, the set of types (also called sorts);
• OP, the set of constant and operation symbols; K
t
is a set of constant symbols of types t ∈ T, OP
w,t
is a set of operation symbols with argument types
w ∈ T
∗
(T
∗
is a set of strings built using types t ∈
T, i.e., ht
1
, ..., t
n
i), and a range type t ∈ T (t
n+1
∈
T).
An intuitive data type: boolean can be defined us-
ing ADT. Its signature is the following:
bool =
sort bool
opns: TRUE, FALSE → bool
NOT: bool → bool
AND: bool bool → bool
engine =
sort piston, valve, engine
block, engine
opns eASSEMBLY: piston × valve
× engine block, → engine
Figure 3: Signature of a concept engine.
where T = {bool}, and K
t
= {TRUE, FALSE},
OP
w,t
= {NOT, AND}. As it can be seen, there is no
information about the values boolean can take, as well
as results of operations AND and NOT.
4.2 Protoforms as Algebraic Signatures
High level of abstraction and universal character of
both protoforms and ADT have led us to the idea of
applying algebraic signatures for representing proto-
forms. The very aspects of ADT, such as focus on
generic nature of relationships among data compo-
nents and an implementation independence, make this
idea very attractive.
Let us take a look at a simple example of a proto-
form signature. The protoform signature presented in
Fig. 3 is the signature of a simple concept engine. It
contains a number of components and a single func-
tion identifying a relation between them.
The signature engine can be treated as an ele-
mentary protoform, and other protoforms can be built
based on it. For example, it can be extended by in-
troducing new types and operations. The extended
signature is shown in Fig. 4.
The signature engine can also be used as a part of
more complex signatures. An example of such signa-
ture is presented in Fig. 5. This signature named car
contains additional types and operations.
turboEngine =
sort piston, valve, engine
block, engine,
turbocharger, turbo
engine
opns eASSEMBLY: piston × valve
× engine
block, → engine
tASSEMBLY: engine × turbocharger
→ turbo engine
Figure 4: Signature of a concept turbo
engine.
MATHEMATICAL FRAMEWORK FOR GENERALIZATION AND INSTANTIATION OF KNOWLEDGE
251
car =
sort engine, body, interior, wheel, car
opns cASSEMBLY: engine × body
× interior × wheel → car
Figure 5: Signature of a concept car.
5 PROTOFORMS AND
CATEGORY THEORY
5.1 Concept
Representation of protoforms using algebraic specifi-
cations (signatures), presented in the Section 4.2, cre-
ates a possibility of formalizing protoforms and pro-
cesses of their construction. Therefore, we define a
category Protoforms in the following way.
Definition 4 The category Protoforms has
objects
protoforms represented by signatures
morphisms
signature morphisms – it maps the sorts and oper-
ations from one signature to another (possible mor-
phisms are substitutions, inclusions, extensions).
Construction of category Protoforms provides
several advantages: a more mathematical approach to
dealing with protoforms, a better understanding of re-
lations between protoforms, a systematic approach to
constructing more complex protoforms.
The category Protoforms is presented here in the
form of examples of their objects, and an example of
application of the pushout construction.
5.2 Protoforms as Objects
The signatures presented in Fig. 3, 4, and 5 are ob-
jects of the category Protoform. It can be shown that
there is a very simple morphism between two of them,
Fig. 6. This morphism is just an extension of the
sort engine into turbo
engine. The protoform turbo-
Engine contains an additional type turbocharger and
one more operation tASSAMBLY that represents a pro-
cess of adding turbocharger to an engine.
For the purpose of the next subsection related
to construction of more complex protoforms, these
protoforms are redefined, Fig. 7, and the signature
car is renamed protoformCar.
5.3 Protoform Category and Universal
Constructs
Universal constructions can be used to define relation-
ships among protoforms.
engine
sort piston, valve, engine
block, engine
opns eASSEMBLY: piston × valve
× engine block → engine
turboEngine
sort piston, valve, engine
block, engine, tur-
bocharger, turbo
engine
opns: eASSEMBLY: piston × valve
× engine block → engine
tASSEMBLY: engine × turbocharger →
turbo
engine
?
Figure 6: An example of a morphism in the category Proto-
forms.
protoformEngine =
sort engine
protoformTurboEngine =
sort turboEngine
Figure 7: Objects of Protoform. category
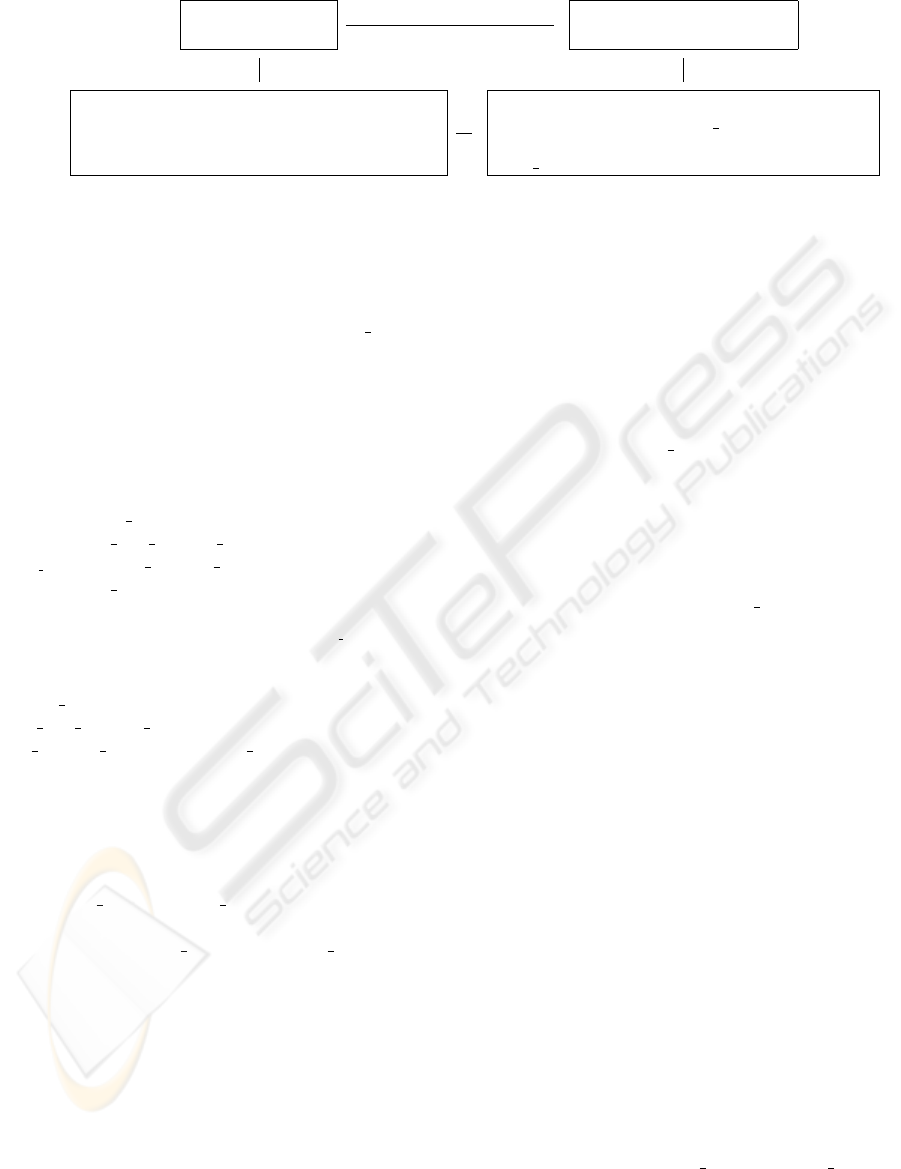
Example A pushout that uses protoformTurboEngine
and protoformCar to create a new protoform - proto-
formTurboCar is shown in Fig. 8. The process of con-
structing a new protoform is ”defined” by the map-
pings of the sort engine of protoformEngine to the sort
engine of protoformCar, and to the sort turboEngine
of protoformTurboEngine. The engine and turbo-
Engine are ”amalgamated”, and the resulting proto-
form has the sort turboEngine.
6 INSTANTIATION AND
CATEGORY THEORY
6.1 Models
The definition of signature (Section 4.1) identifies
sorts (types) and operations, but does not provide any
details about them, i.e., values and relations among
these values. However, each signature can be used to
create a model (an algebra). This is done by assigning
concrete values to each type and operation.
Definition 5 A model or algebra for a signature SIG
consists of a T-indexed collection (A
t
)
t∈T
of carrier
sets together with a collection of suitably typed op-
erations: each operation symbol OP : t
1
, ..., t
n
→ t
n+1
ICSOFT 2007 - International Conference on Software and Data Technologies
252
protoformEngine
sort engine
f
-
protoformTurboEngine
sort turboEngine
PO
protoformCar
sort engine, body, interior, wheel, car
opns cASSEMBLY: engine × body × interior ×
wheel → car
m
?
n
-
protoformTurboCar
sort, turboEngine, body, turbo
car
opns tASSEMBLY: turboEngine × body →
turbo
car
k
?
Figure 8: An example of a pushout (PO) in the category Protoforms.
in SIG is mapped to an actual operation JOPK : A
t
1
×
... × A
t
n
→ A
t
n+1
between the corresponding carrier
sets. Thus a model consists of a pair ((A
t
)
t∈T
, J
K).
In other words a model represents a ”concrete”
piece of knowledge built based on a signature. A sin-
gle signature can be used to create several models.
Example. A simple model (each type has only one
possible value) that can be built based on engine is
presented below.
A
engine
=
A
piston
: {3− ring
pistons}
A
valves
: {intake
and exhaust valves}
A
engine
block
: {block
without sparks}
A
engine
: {diesel
engine}
JeASSEMBLY
A
K: A
piston
× A
valves
× A
engine
block
→ A
engine
(3− ring
pistons,
intake
and exhaust valves,
block
without sparks) → diesel engine
From the perspective of category theory models
built based on signatures can be treated a category.
Definition 6 The category Sig-Model of models of
signatures has
objects
(SIG, (A
s
, J
K) where (A
s
, J K) is a model for SIG
morphisms
(φ, (H
s
)) : (SIG, (A
s
, J K) → (SIG
′
, (A
′
s
, J K
′
)
where each morphism consists of a morphism of sig-
nature φ : SIG → SIG
′
, and a |SIG|-indexed collection
of operations
A relationship between signatures and models re-
sembles the relationship between protoforms and in-
stances. In order to utilize this relationship, we need
to build a category of instances.
Definition 7 The category Instances has
objects
models of protoform signatures
morphisms
model morphisms containing signature morphims
6.2 Instantiation and Fibers
The concept of a fibration (Section 3.2) represents a
very interesting way of formalizing relations between
two categories. It has been found (Jacobs, 2001) that
the relationship between a set of models and a sin-
gle signature is a fibration. So the functor between
the category of models Sig
Model and the category of
signatures Sig is a fibration. This can be represented
in the following way:
Sig-Model
↓
Sig
In other words the functor Sig
Model → Sig
sends models to its underlying signature. A fiber over
an object (signature) SIG ∈ Sig is a model of the sig-
nature SIG. We can induce that similar relation ex-
ists between objects of the categories Instances and
Protoforms.
Instances
↓
Protoforms
This defines and formalizes relationships that exist
between protoforms and instances. All these observa-
tions can be summed-up into a single statement that
instances are fibers over protoforms.
7 DISCUSSION
The idea of treating protoforms as a base category
for instances brings a very elegant way of identify-
ing relationships that exist among protoforms and in-
stances. Fig. 9 represents a very simple knowledge
system that will be used to explain benefits of the
idea we propose in the paper. The system contains
three protoforms engine, turbo
engine, and car turbo.
Each of the protoform signatures is a base for a set
of models – instances. Instances of engine are rep-
resented by small circles with two explicit instances
MATHEMATICAL FRAMEWORK FOR GENERALIZATION AND INSTANTIATION OF KNOWLEDGE
253
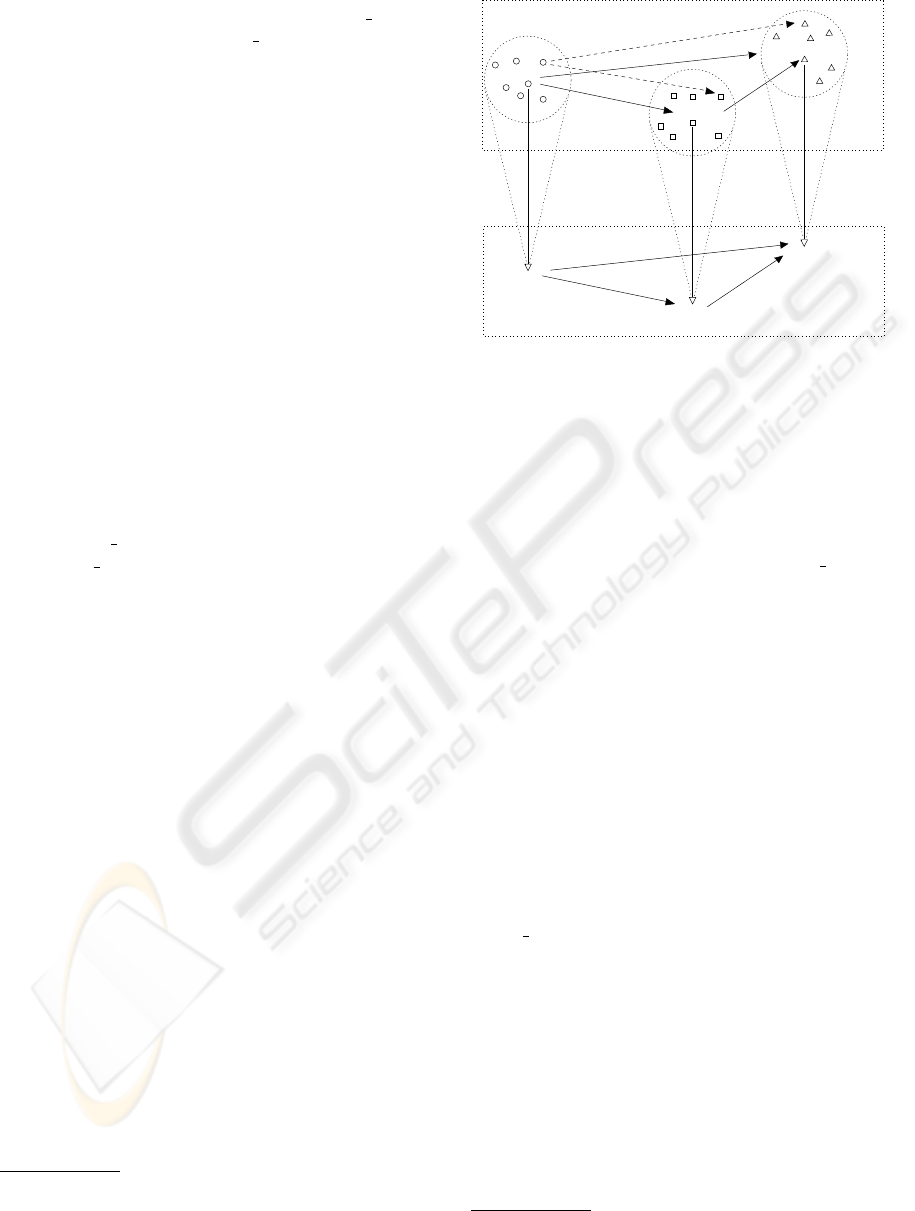
V8 and V6. Similar situation is seen for turbo engine
– squares and turboV8, and car
turbo – triangles and
Porsche911Turbo. There are also morphisms f, g, k
between protoforms, and morphisms , f’, g’, k’, f”,
g” between instances.
Fig. 9 illustrates what it means that instances are
fibers over protoforms, and how this fact influences
relationships between protoforms and instances. A
few interpretations are included here. The first one is
based on the definition of opfibration
2
, and the others
on its consequences:
• let us assume that the morphism f exists and that
the system receives a piece of information V8
which is identified as the instance of the engine;
this means that there is a morphism f’ such that
there should be two morphisms g’ and k inducing
a unique morphism k’;
• if a new piece of knowledge V6 appears, and it is
an instance of the protoform engine, then the sys-
tem should search for morphisms between this in-
stance and other instances, this search is induced
by the existence of morphisms between engine (f)
and turbo
engine (g), as well as between engine
and car
turbo; the system will constantly search
for these morphisms (f” and g” in Fig. 9) until all
relations identified in the definition of opfibration
are satisfied;
• if a morphism (connection) is found between two
instances that belong to the models of different
protoforms not related to each other, the system
would treat this morphism as a ”hint” that both
protoforms should connected; as above, the sys-
tem will search for such a morphism until all re-
lations identified in the definition of opfibration
are satisfied, and the correctness of this new mor-
phism is validated.
8 CONCLUSIONS
This paper presents preliminary results of the work
on application of the ADT and category theory to the
concepts of protoforms and instances. It has been
shown that such application is feasible and promises
a number of benefits. The most important benefits
include a systematic approach to dealing with proto-
forms and their instances; a formal way of merging
protoforms and building new ones; and a formal way
2
Fig. 9 can be used to define opcartesian morphism re-
quired for definition of opfibration. As it was stated in Sec-
tion 3.2, this definition is a dual to fibration. For details
please look (Barr and Wells, 1999).
g’
engine
turbo_engine
car_turbo
k
g
f
f’
Instances
Protoforms
k’
turboV8
V8
Porsche911Turbo
V6
g"
f"
Figure 9: An example of knowledge system built based on
the categories Protoforms and Instances (”balloons” rep-
resent fibers over protoform signatures).
of validating correctness of newly established connec-
tions between protoforms and instances.
Additional work is needed towards a full utiliza-
tion of such concepts as specification of protoforms,
and application of Specware
3
(Kestrel
Institute,
2004), for development of protoform-based systems.
REFERENCES
Barr, M. and Wells, C. (1999). Category Theory for Com-
puting Science. Les Publications CRM, Montreal.
Fiadeiro, J. L. (2005). Categories for Software Engineering.
Springer-Verlag, Berlin.
Jacobs, B. (2001). Categorical Logic and Type Theory. El-
sevier, Amsterdam.
Kacprzyk, J. and Zadrozny, S. (2005). Linguistic database
summaries and their protoforms: towards natural lan-
guage based knowledge discovery tools. In Informa-
tion Sciences, volume 173, pages 281–304.
Kestrel
Institute (2004). Specware 4.1 User’s Manual.
Kestrel Development Corp., Palo Alto, California.
Yager, R. R. (2006). Knowledge trees and protoforms in
question answering systems. In Journal of the Ameri-
can Society for Information Sciences.
Zadeh, L. A. (2002). A prototype-centered approach to
adding deduction capabilities to search engines - the
concept of a protoform. In BISC Seminar, University
of California, Berkeley.
3
An automated software development system based on
principles of ADT and category theory.
ICSOFT 2007 - International Conference on Software and Data Technologies
254
