
MULTICRITERIAL DECISION-MAKING IN ROBOT SOCCER
STRATEGIES
Petr Tu
ˇ
cn
´
ık
University of Hradec Kr
´
alov
´
e
N
´
am
ˇ
est
´
ı svobody 331, 500 01, Hradec Kr
´
alov
´
e
Jan Ko
ˇ
zan
´
y and Vil
´
em Srovnal
V
ˇ
SB - Technical University of Ostrava
17. listopadu 15, 708 33, Ostrava-Poruba
Keywords:
Multicriterial decision-making, robot soccer strategy.
Abstract:
The principle of multicriterial decision-making is used for the purpose of autonomous control of both in-
dividual agent and the multiagent team as a whole. This approach to the realization of control mechanism
is non-standard and experimental and the robot soccer game was chosen as a testing ground for this control
method. It provides an area for further study and research and some of the details of its design will be presented
in this paper.
1 INTRODUCTION
A great deal of scientific effort is aimed at the multi-
agent systems today. Also, the area of multicriterial
decision-making (or decision-support) is well devel-
oped. Nevertheless, the combination of both princi-
ples mentioned above still stands aside of the scien-
tific interest focus and provides a space for further
study.
The need to follow the restrictions as well as
semantic meanings of general definitions provided
by both principles is the reason why it is necessary
to re-define some notions from the point of view
of multicriterial decision-making (MDM) in multi-
agent systems (MAS). Also, the principle changes
of both little or big importance have to be made ac-
cordingly. It is important to remember the fact, that
there are restrictions and constraints, i.e. above all,
the need of numerical representation of all the facts
relevant for the decision-making (DM) process.
The MDM in MAS shows many features which
make such approach at least very interesting. It is
a method that is capable of providing an autonomous
control to the MAS as a whole or to the individual
agent. We have focused our research of this DM
system on the problem of the robot soccer game.
The game is fast, quickly evolving and represents
a dynamically changing environment, where it is im-
possible to follow long-term plans. We have to make
decisions based on the limited set of attributes (most
of them have to be computed from the processed im-
ages), while there is a theoretically infinite amount
of solutions and a minimal number of possible actua-
tor actions.
2 THE THEORETICAL PART
We introduced the basics of MDM terms in (Tu
ˇ
cn
´
ık
et al., 2006). In (Ram
´
ık, 1999), (Fiala et al., 1997),
the wide scale of methods of multi-criteria decision-
making may befound. The Fig. 1 shows the steps
of the MDM process.
After initialization and goal acquisition in the phase
0, the agent tries to refresh its environmental data
by its sensors – this is the phase 1. The agent’s
environment is described by attributies. Each at-
tribute is expressed numerically and represents mea-
sure of presence of given characteristic in the environ-
ment. The attribute value fits into bordered interval
the endpoints (upper limit and lower limit) of which
428
Tu
ˇ
cn
´
ık P., Koz
ˇ
an
´
y J. and Srovnal V. (2007).
MULTICRITERIAL DECISION-MAKING IN ROBOT SOCCER STRATEGIES.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 428-431
Copyright
c
SciTePress
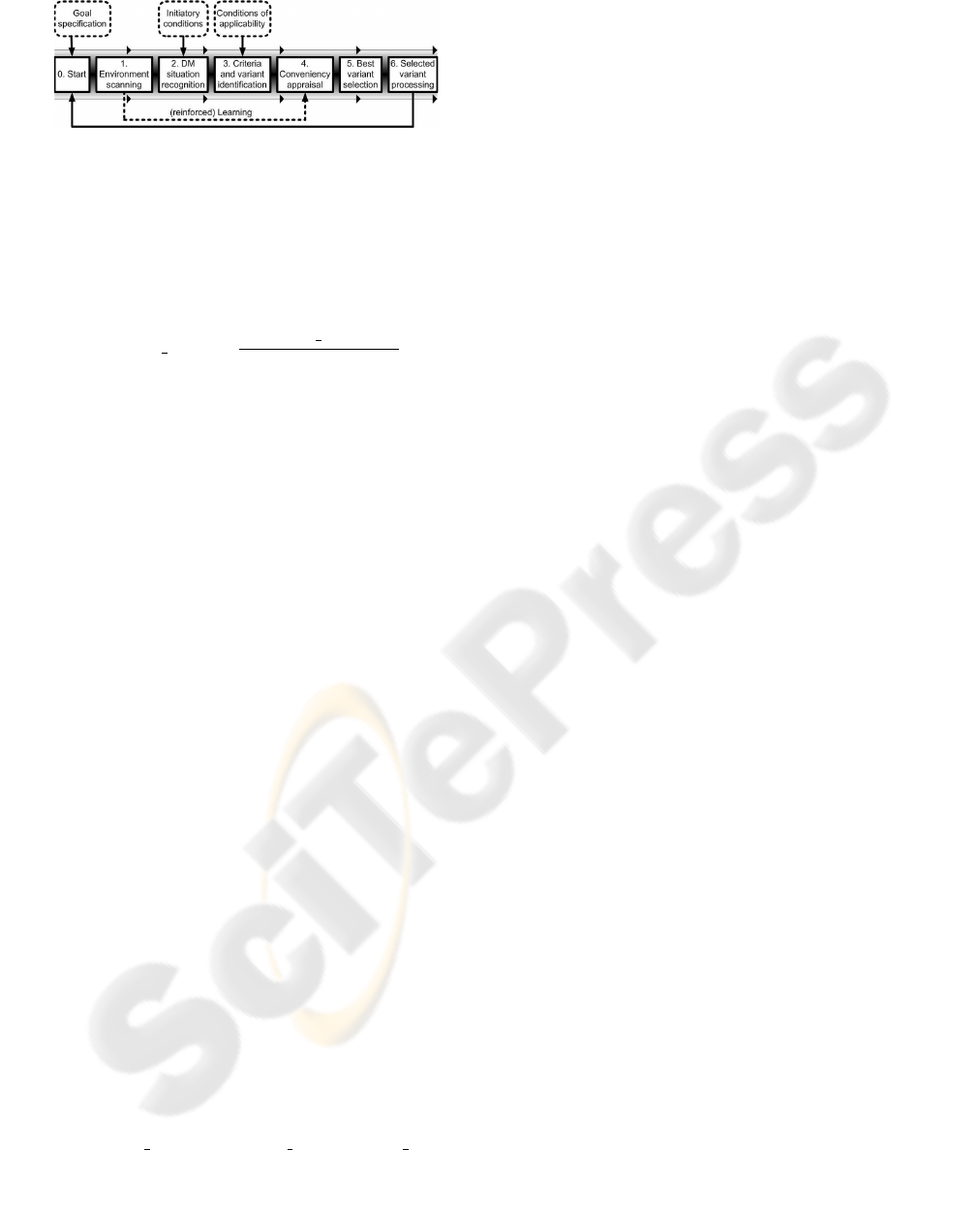
Figure 1: The MDM process.
are specified by the sensor sensitivity and range. Dur-
ing the signal processing, the standard normalization
formula
normalized
value =
attribute
value − k
l − k
(1)
is used. The attribute value is normalized to the in-
terval of h0; 1i and variables k, l are expressing
the lower and upper limit of the sensor scanning
range.
The set of initiatory conditions is used for
the decision-making situation recognition in the phase
2. It has to provide the agent with the ability to re-
act to unexpected changes in the environment dur-
ing its target pursue. Also, it must allow the agent
to change its goal through the decision-making pro-
cess pertinently, e.g. if the prior goal is accomplished
or unattainable. In the phase 3, the conditions of ap-
plicability characterize the boundary that expresses
the relevance of using the variant in the decision-
making process. The most important step is the phase
4, where the convenience appraisal of applicable vari-
ants is performed. This step plays the key part
in the decision-making procedure. The following for-
mula is used:
conv =
X
i
w(inv(norm(a
v
i
))), i = 1, . . . , z, (2)
where v stands for the total number of variants and
z is total number of attribute values that are needed
for computation of convenience value.
The convenience value for the each of assorted
variants is obtained. Attributes a
v
i
stand for presump-
tive values of universum-configuration and the norm
function normalizes the value of the attribute and is
mentioned above (1). The function inv is important,
as it represents reversed value of difference between
real attribute value and ideal attribute value:
inv(current
val) = 1 − |ideal val − current val|.
(3)
The optimal variant remains constantly defined
by m-nary vector of attributes, where m ≤ z, for
the each of the decision-making situations and at-
tributes a
v
i
differ for each variant other than the op-
timal variant. There is a final number of activities that
the agent is able to perform. As the inverse values
of difference between the real and ideal variant are
used, in the most ideal case, the convenience value
will be equal to 1, and in the worst case it will be
close to 0. Im(inv) = (0; 1i . The lower open bound-
ary of the interval is useful, because troubles related
to computation with zero (dividing operations) may
be avoided.
The function w assigns the importance value
(weight) to the each attribute. The machine learning is
realized by proper modifications of the weight func-
tion. Importance of attributes differs in accordance
with the actual state of the agent. E.g. energetically
economical solution would be preferred when the bat-
tery is low, fast solution is preferred when there is
a little time left, etc. Precise definitions of weight
functions are presented in (Ram
´
ık, 1999), (Fiala et al.,
1997). In the phase 5, the variant with the highest
convenience value is selected and its realization is car-
ried out in the phase 6. During processing of the se-
lected solution, the agent is scanning the environ-
ment and if the decision-making situation is recog-
nized, the whole sequence is repeated. The evaluation
function (e.g. reinforced learning functions examples
in (Kub
´
ık, 2000), (Pfeifer and Scheier, 1999), (Weiss,
1999)) provides the feedback and supports the best
variant selection, as it helps the agent in its goal pur-
sue. Based on the scanned environmental data, modi-
fications of the function w are made during the learn-
ing process.
3 THE PRACTICAL PART
As it was said above the robot soccer game is
a strongly dynamical environment (Kim et al., 2004).
Any attempt to follow a long-term plan will very
probably result in a failure. This is a reason why
there are many solutions of this problem founded
on the agent-reactive basis. But such reactive ap-
proach lacks potential to develop or follow any strat-
egy apart from the one implemented in its reactive be-
havior.
On the other hand, the MDM principle, in general,
provides a large variety of solutions and the strategy
may be formed by the modifications of the weight co-
efficients value. Such modifications change behavior
of the team as a whole and/or its members individu-
ally.
Simple reactions do not provide sufficient effort po-
tential, or, in other words, the efficient goal pursue.
There is a need of a quick, yet more complicated, ac-
tions, that would allow us to build up a strategy. Also,
there is an important fact that the efficient strategy
must not omit the agent cooperation.
3.1 Centralized vs. Autonomous
Control
As there are two possible points of view – individ-
ual (agent) and global (team) - there are also two
corresponding goals for the each agent. The global
goals represent target state of the game for the team
as a whole and pursue of global goal is superior to the
individual goal of each agent. Therefore, the aim
of individual goal has to correspond with the global
goal. However, the emphasis on the autonomous
behavior allows the agent to temporarily damage
the team’s effort of the global goal pursue in order
to improve its position significantly in the next it-
eration(s). The autonomous aspect of the multia-
gent approach is therefore used to avoid local maxi-
mum lock-down. These ideas underline our approach
to the solution of this problem.
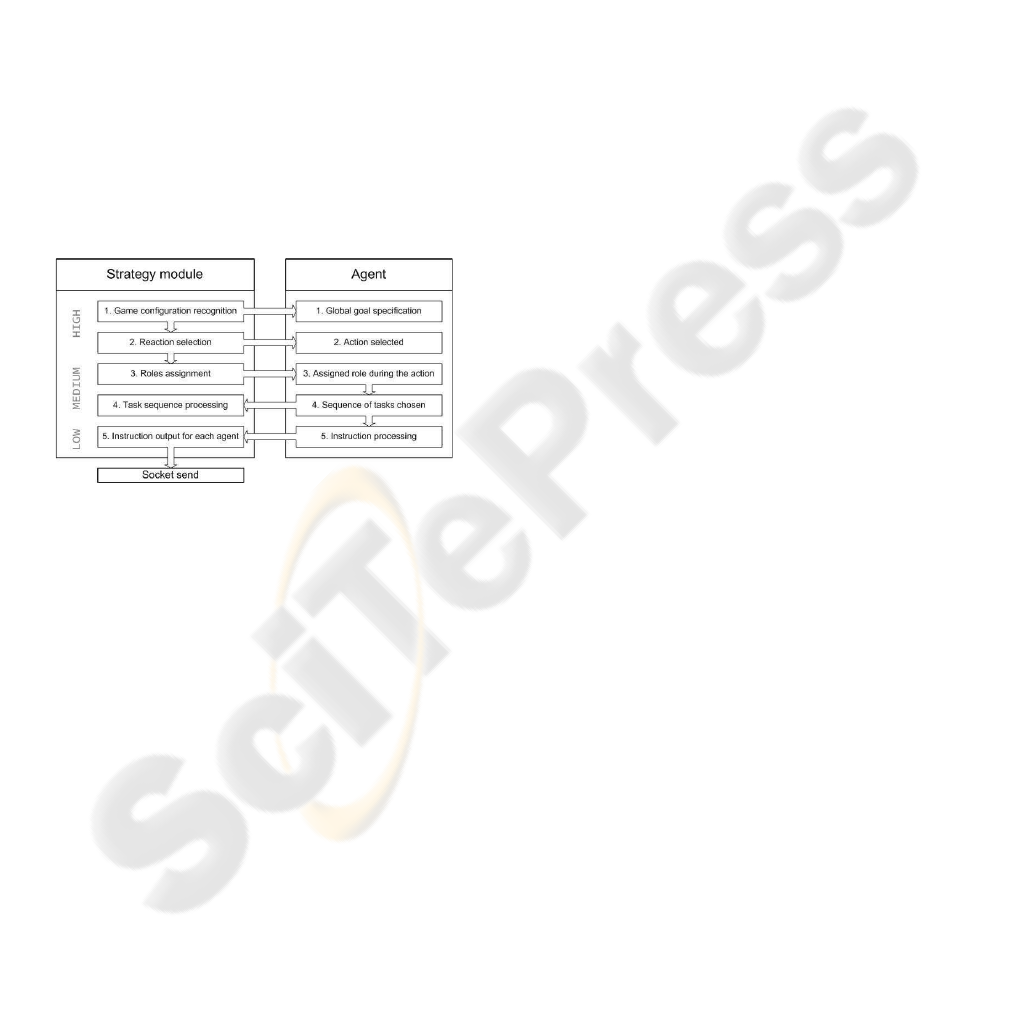
Figure 2: The scheme of communication between
the strategy module and agents (the agent on the right
stands for any agent of our team). At the beginning
the game configuration is recognized and goal spec-
ified for each agent. In the second phase is chosen
the most appropriate reaction in the form of action
the agent has to perform. It is also assigned a role
in the scope of this action. Then the agent itself forms
a sequence of small tasks, which leads it towards ad-
vance in its goal pursue. These tasks are also pro-
cessed in the strategy module, because of possible
conflict check. As the last step, the set of simple in-
structions (i.e. practically HW instructions) is gener-
ated accordingly. These instructions represent the fi-
nal output of the strategy module.
In order to gain maximum profit from both
global (centralized) and individual (autonomous) ap-
proaches, the incremental degradation of central-
ization towards the autonomy was chosen during
the strategy selection process. This means assignment
of more individual instructions at the end of the strat-
egy forming process and, on the contrary, the global
team role assignment at its beginning. Fig. 2
shows the sequence of the decision output assigned
to the agent.
There are three levels of the strategy module
corresponding with three levels of decisions made.
The high level strategy is responsible for the game
configuration assessment and selection of the most
appropriate actions. It is also a level, where the most
centralized evaluations and global decisions are made.
The second layer of the medium level strategy is
where the role and task assignment operations are per-
formed. The notion of a ”task” refers to the quite sim-
ple sequence of orders, for example: GO TO POSI-
TION X, Y, ANGLE 60
◦
.
Such simple tasks are transformed into instruc-
tions in the third (and final) low level strategy layer.
These instructions are hardware-level commands and
are used to set the velocity of the left and right wheel
of the robot, separately. Because these instructions
represents formatted output of the strategy module,
they require no more of our further attention, as it is
no aim of this paper to discuss such issues.
3.2 High Level Strategy
The purpose of this part of the strategy module is
to provide a game configuration analysis and to per-
form a multicriterial selection of an appropriate re-
action to the given state (of the game). There is
an infinite number of configurations. Therefore, lim-
iting, simplifying supportive elements have been im-
plemented.
We will mention just one of these simplifying
tools. The first and most important supportive ele-
ment of the DM process is a ball-possession attribute.
As the ball is the most important item in the game, it
also plays a crucial role in the strategy selection pro-
cess. Whoever controls the ball controls the game.
Accordingly to the ball-possession, the set of all pos-
sible strategies is divided into three subsets. These
subsets are:
• offensive strategies (our team have the ball),
• defensive strategies (opponent has the ball) and
• conflict strategies (no one has the ball or the posses-
sion is controversial (both teams have players very
close tothe ball)).
Each item of these subsets has attached a certain
number of actions to it. These actions represent dif-
ferent ways of superior (global) goal pursue.
In the MDM system, the convenience value must be
obtained (from the formula (2)) for each of the possi-
ble solutions. This procedure is called multicriterial
decision making process (MDMP) in the following
text.

Because we need enough information to make
a qualified decision (see (Fiala et al., 1997), (Ram
´
ık,
1999)), the sufficient amount of attributes has to be
present. But there is a limited amount of data from
the video recognition module. This is the reason, why
it is necessary to perform additional attribute comput-
ing and gain more information needed.
The notion of the game configuration was used be-
fore. It refers, in the first place, to the position and
angle of orientation of the each agent (robot) and
to the position of a ball in the game. These are basics
we can use to form a prediction of state of the game
in next iterations. The prediction is based on the game
configuration data (GCD) of the actual iteration and
a few iterations back. However, it is vain to try to pre-
dict too far into the future, as the game is developing
and the environment changing quickly.
Such approach to information extraction ensures
enough data for GCD processing. The ACTION se-
lected afterwards represents reaction of the multia-
gent system to the present situation. Such ”ACTION”
is the basic concept for the behavior scheme and few
steps in the medium layer of the strategy module have
to follow until the final output (command) is gener-
ated.
3.3 Medium Level Strategy
The function of this layer of the strategy module is
to assign the role to the agent and to ensure, that
the possible collisions of plans between team-mates
will be avoided. The high level of the strategy module
has selected an appropriate action to the given state
of the game. Further steps during the DM process
have to be taken.
One of the most important parts of the ACTION
structure is the ROLE. The ROLE stands for function
the agent has to guarantee during the subsequent per-
formance of chosen activity. The ROLE may be ei-
ther leader or support. For the leader role, the most
convenient agent is assigned. The convenience value
is calculated using the formula (2), and this calcu-
lation is preferentially based on its position and an-
gle of orientation and additional supportive attributes,
such as prediction of positions and movement trajec-
tories. The support roles are assigned in a similar
manner.
The most important are actions of the leading agent
with the ball. All other activities are inferior to it
and all agents required have to cooperate. However,
in the opposite case, there may be a spare potential
of non-employed agents and its utilization should be
arranged.
As the back-up solution, there is also present a stan-
dard behavior algorithm. Such behavior is applied
when there are no other actions possible or suitable
for given situation, or not enough agents available for
execution.
As it is shown in the Fig. 2, the selection of the se-
quence of tasks is the next step. Every action may be
divided into atomic tasks. This decomposition forms
desired sequence and check operations are performed
to avoid collisions and other errors or mistakes. The
possible necessary adaptations are made in a central-
ized manner and all agents proceed to the final low-
level layer of the strategy module.
4 CONCLUSION AND FUTURE
WORK
The implementation of the MDM-based control
mechanism is an experimental matter. The robot soc-
cer game provides the testing and proving ground for
this approach. Further tests have to be performed
as well as adaptation and optimization work. How-
ever, the principle shows a promising potential and
it is able to function as a control mechanism and
decision-making tool.
ACKNOWLEDGEMENTS
The work and the contribution were supported by the
project from Grant Agency of Czech Academy of Sci-
ence - Strategic control of the systems with multia-
gents, No. 1ET101940418 (2004-2008) and by the
project from the Czech Republic Foundation - AMI-
MADES, No. 402/06/1325.
REFERENCES
Fiala, P., Jablonsk
´
y, J., and Manas, J. (1997). V
´
ıcekriteri
´
aln
´
ı
rozhodov
´
an
´
ı. V
ˇ
SE Praha.
Kim, J., Kim, D., Kim, Y., and Seow, K. (2004). Soc-
cer Robotics (Springer Tracts in Advanced Robotics).
Springer-Verlag.
Kub
´
ık, A. (2000). Agenty a multiagentov
´
e syst
´
emy. Silesian
University, Opava.
Pfeifer, R. and Scheier, C. (1999). Understanding Intelli-
gence. Cambridge, Massechusetts.
Ram
´
ık, J. (1999). V
´
ıcekriteri
´
aln
´
ı rozhodov
´
an
´
ı – Analytick
´
y
hierarchick
´
y proces (AHP). Silesian University.
Tu
ˇ
cn
´
ık, P., Ko
ˇ
zan
´
y, J., and Srovnal, V. (2006). Multicriterial
decision-making in multiagent systems. Lecture Notes
in Computer Science, pages 711 – 718.
Weiss, G. (1999). Multiagent Systems – A Modern Ap-
proach to Distributed Artificial Intelligence. Cam-
bridge, Massechusetts.
