
INITIAL DEVELOPMENT OF HABLA (HARDWARE
ABSTRACTION LAYER)
A Middleware Software Tool
Andrés Faíña, Francisco Bellas and Richard J. Duro
Integrated Group for Engineering Research, University of Coruña, Mendizabal S/N, Ferrol, Spain
Keywords: Middleware software tool, control s
ystem abstraction, autonomous robotics.
Abstract: In this work we present the initial implementation of a m
iddleware software tool called the Hardware
Abstraction Layer (HABLA). This tool isolates the control architecture of an autonomous computational
system, like a robot, from its particular hardware implementation. It is provided with a set of general sensors
and typical sensorial processing mechanisms of this kind of autonomous systems allowing for its application
to different commercial platforms. This way, the HABLA permits the control designer to focus its work on
higher-level tasks minimizing the time spent on the adaptation of the control architecture to different
hardware configurations. Another important feature of the HABLA is that both hardware-HABLA and
HABLA-control communications take place through standard TCP sockets, permitting the distribution of
the computational cost over different computers. In addition, it has been developed in JAVA, so it is
platform independent. After presenting the general HABLA diagram and operation structure, we consider a
real application using the same deliberative control architecture on two different autonomous robots: an
Aibo legged robot and a Pioneer 2Dx wheeled robot.
1 INTRODUCTION
The origin of this work can be found in the research
on autonomous robotics carried out in our group. It
usually implies the acquisition of one or more
commercial robots or the construction of new ones.
In any case, the robots must be programmed in their
own programming language (C, C++, Lisp, etc) and
their particular hardware architecture must be taken
into account when developing its control software.
Manufacturers usually provide an API (Application
Program Interface) with a reduced set of high level
commands to develop basic functionalities.
Examples of these tools are AIBO SDE (AIBO,
2007) (a software development environment for
AIBO robots) or Aria (Aria, 2006) (that supports
different robot models from Activmedia Robotics).
The main problem with these tools is that they are
specific for a given family of robots and they require
the designer to develop the control architecture in a
preestablished programming language.
Nowadays, there is no standardization or even a
gene
ral preference about the most appropriate
programming language to be used in autonomous
robotics, and the trend is to continue in the same
way. As a consequence, even though two robots may
have the same sensors and actuators, if we want to
execute the same control architecture on both, we
must modify the programming and adapt it to the
particular language and implementation of each
robot.
In order to deal with this problem, more general
fram
eworks have been developed in recent years
trying to
achieve complete independence from the
robot m
anufacturer. These tools can be classified as
middleware software that abstracts the control
architecture from the particular hardware. Examples
of this kind of tools are
Miro (Utz, 2002), Webots
(Mich
el, 2004) or YARP (Metta, 2006) that permit
development in a broad range of different robotic
systems. Miro is a distributed object oriented
framework for mobile robot control, based on
CORBA (Common Object Request Broker
Architecture) technology. It is focused on wheeled
robots such as Pioneer or Sparrow and it does not
provide support, for example, for legged robots like
Sony’s AIBO (very popular in autonomous robotics
research) or humanoid prototypes. Webots “provides
a rapid prototyping environment for modelling,
programming and simulating mobile robots”. It
includes several libraries that allow the designer to
transfer the control programs to many commercially
available real mobile robots. Finally, YARP “is
written by and for researchers in humanoid robotics,
who find themselves with a complicated pile of
53
Faíña A., Bellas F. and J. Duro R. (2007).
INITIAL DEVELOPMENT OF HABLA (HARDWARE ABSTRACTION LAYER) - A Middleware Software Tool.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 53-58
DOI: 10.5220/0001627800530058
Copyright
c
SciTePress
hardware to control with an equally complicated pile
of software”.
The abstraction level provided by these tools
could be necessary in other autonomous
computational systems (different from robotics) with
sensors and actuators of very different nature and
with a complex control system like, for example,
domotic applications. Taking into account these
generalization, in this work we propose the creation
of a middleware tool to be applied in different
autonomous computational systems characterized by
different sensors and actuators controlled through a
complex architecture that could be executed
remotely. The only reference we have found that
follows this philosophy and supports different
hardware devices and application fields is Player
(Gerkey, 2003). This tool provides an interface and a
protocol to manage sensorial devices and robots over
a network and accepts different programming
languages for the control architecture. It runs on
several robotic platforms and supports a wide range
of sensors. At this time the developments outside the
robotics field are limited. The general middleware
tool we propose is called the Hardware Abstraction
Layer (HABLA).
2 HARDWARE ABSTRACTION
LAYER (HABLA)
The desired features for the Hardware Abstraction
Layer can be summarized into a group of six:
Device independence: it must support the most
common sensors and actuators present in
autonomous computational systems such as cameras,
microphones, infrared sensors, sonar sensors, motion
sensors, etc. In addition, it should be provided with
particular implementations for the most typical
commercial platforms, for example, the robots used
in research like Pioneer, Kephera, Aibo, etc.
Virtual sensing and actuation: it must provide
typical sensorial processing such as color
segmentation or sound analysis so that higher level
information like distance to nearby objects or sounds
can be considered by the control architecture.
Computational cost distribution: it must support
communications through a computer network by
TCP sockets in order to execute the control
architecture, the low-level control program and the
different elements of the HABLA itself over
different computers. It seems obvious that, for
example, sound or image processing should not be
executed directly in the robot.
Control architecture independence: it must be
independent of the programming language used in
the control architecture, this is, we do not impose
any particular programming language.
Scalability: the HABLA should present a
modular design and an open architecture in order to
increase the number of supported sensors and
actuators corresponding to new commercial
platforms.
Operating System independence: it must be
implemented in JAVA to achieve operating system
independence. In addition, JAVA is the most
standard object oriented language, so the HABLA
could easily include contributions from the research
community.
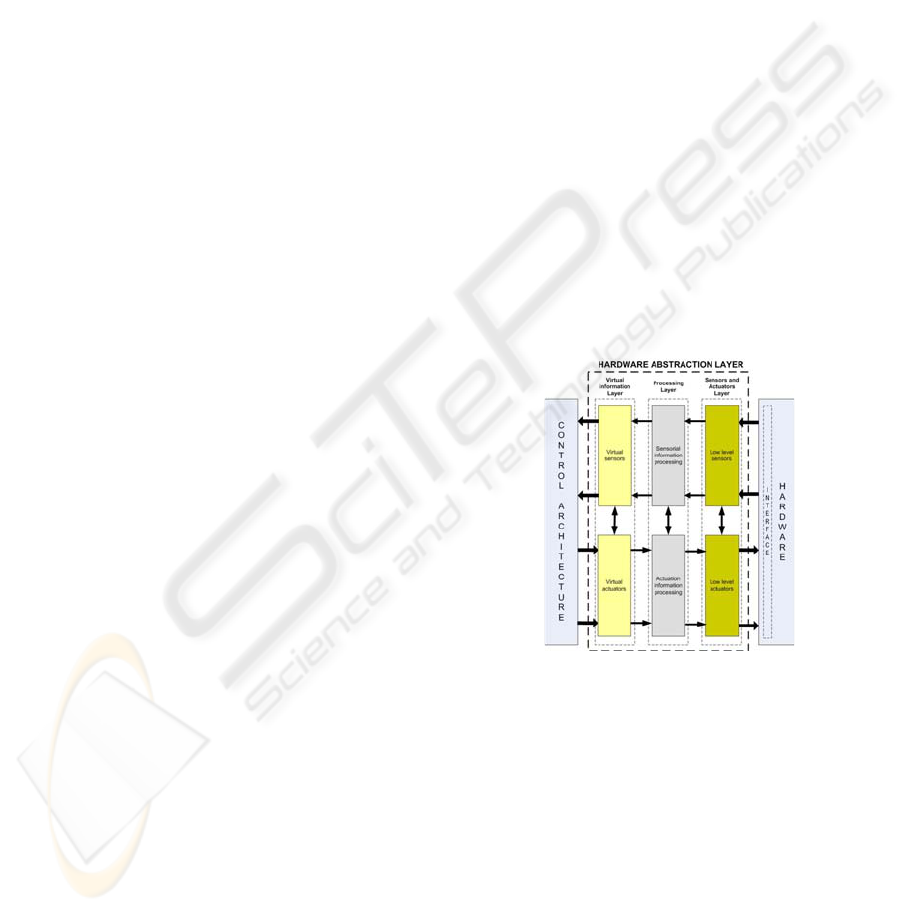
Figure 1 shows a general diagram of the
Hardware Abstraction Layer for a typical
autonomous computational system. The left block
represents the control architecture that requests
sensorial information from the low level devices and
provides the action or actions to be executed through
the actuators. A basic idea behind the HABLA
development is that we assume that the control
architecture requires high level sensorial
information, this is, the basic sensorial processing is
not executed in the control architecture. In addition,
the actions selected can be complex actions, and not
only individual commands to the actuators.
Figure 1: General diagram of the Hardware Abstraction
Layer for a typical robotic system.
The right block in Figure 1 represents the
hardware (sensors and actuators) that provides
sensorial information to the control architecture and
receives the action or actions that must be applied.
In this case, the sensors provide low level
information (with no processing) and the actuators
require low level data too.
As shown in Figure 1, the middle block
represents the Hardware Abstraction Layer, an
element that isolates the high level information
handled by the control architecture from the low
level information handled by the sensors and
actuators. The communications between control
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
54
architecture and HABLA and between HABLA and
hardware use TCP sockets, as commented before, in
order to permit the distributed execution of these
three basic elements.
Inside the HABLA we can see three sequential
layers: the sensors and actuators layer, the
processing layer and the virtual information layer in
order of increasing processing of the information.
The HABLA is implemented using JAVA and each
layer contains methods that perform a particular
function. The methods of a given layer can use and
provide information from/to the neighboring layer as
represented by the arrows in Figure 1. The
information exchange between methods of the same
layer is also possible, but not the exchange between
non-neighboring layers (such as the case of the
sensors and actuators layer and the virtual
information layer). The sensors and actuators layer
includes a general set of methods that store the
sensorial information provided by the physical
devices and that provide the commands to be applied
to them. These methods may perform some kind of
processing, as we will see later, and provide their
outputs to the methods of the processing layer. In
this layer, the sensorial information is processed in a
general way, carrying out common signal processing
tasks. In addition, the general processing of the
commands is executed in this layer when required.
The last layer is the virtual information layer where
the information provided by the methods of the
processing layer is treated and presented to the
control architecture. As we can see, we are assuming
a very general case where the low level sensorial
information must be treated in two higher levels
prior to the presentation to the control architecture.
This scheme includes the simple case where the
control architecture requires low level information,
because “trivial” methods that simply transmit this
information without processing could be present in
the processing layer and virtual information layer.
Although the HABLA has been designed to be
run in a single computer, the methods are
independent and can execute a routine or program in
a different computer by means of TCP socket
communications. This way, a highly time consuming
process can be run outside the HABLA computer to
improve efficiency.
All of the methods present in the HABLA must
be as general as possible in order to apply the
HABLA to very different hardware devices or
robotic platforms without changes. This is achieved
by establishing a clear methodology in the creation
of the methods for the sensors and actuators layer
and the virtual information layer. In the case of the
low level methods, we have created a protocol that
must be followed by any software that controls the
hardware at low level. As displayed in Figure 1, the
right block that represents the hardware includes an
internal part called interface. This element
represents the methods or routines that must be
programmed in the native language of the hardware
device controller in order to provide sensorial
information to the HABLA. For example, if the
HABLA is working with a given robotic platform
and we want to use a different one, we will have to
program this interface layer in the new robot to
communicate it with the HABLA according to our
simple protocol.
In the case of the high level methods (virtual
information layer), the HABLA is endowed with a
configuration file that provides the list of active TCP
sockets and the information that is provided on each.
The control architecture that uses the HABLA must
be reprogrammed in order to read the sensorial
information or to write the commands in the
appropriate socket. But, as commented before, a
very important feature of the HABLA is that no
limitation is imposed on the type of programming
language for the control architecture.
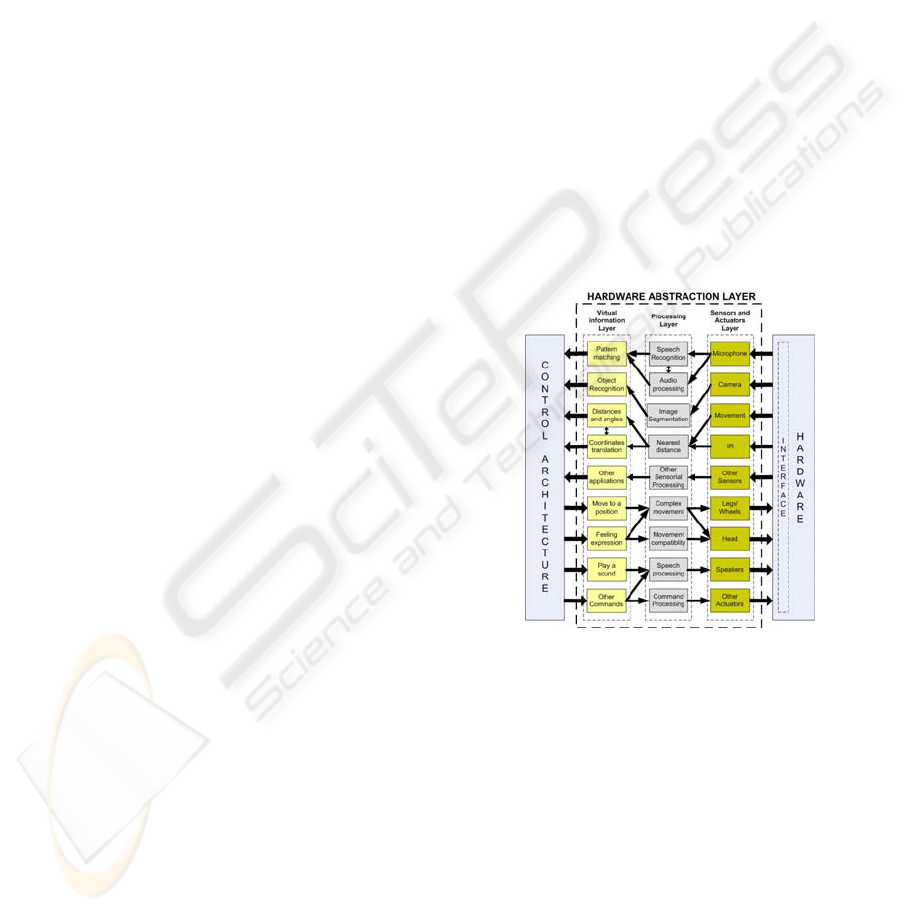
Figure 2: Diagram of the Hardware Abstraction Layer
with sample methods for the case of an autonomous robot.
Figure 2 shows an example of a more detailed
diagram of HABLA in the typical autonomous
computational system we are dealing with,
containing some of the methods that have been
implemented in the HABLA at this time. In the
sensors and actuators layer we have methods that
store sensorial information from typical sensors such
as microphones, cameras, infrared sensors, sonar
sensors, bumpers, light sensors, GPS, motion
sensors, etc. In addition, in this layer we have
methods that send actuation commands, such as
movements of the legs, wheels or head, or a sound to
be played by the speakers, to the interface layer.
In the processing layer we have methods that
INITIAL DEVELOPMENT OF HABLA (HARDWARE ABSTRACTION LAYER) - A Middleware Software Tool
55

carry out, for example, speech recognition or image
segmentation and methods that can compose
complex actuations or control and prevent
impossible movements. These are typical processing
routines, general to different robotic platforms and
environmental intelligence systems. On one hand,
these methods need sensorial information from the
low level methods and provide information to be
used by different methods in the virtual information
layer. On the other, these methods receive data from
the high level ones and execute low level methods to
apply the commands. In general, the methods of this
layer perform a processing function required by
more that one high level method or that affect more
than one actuator. For example, as represented in
Figure 2, the information provided by the sonar
sensors and by the infrared sensors could be
combined in method that provides the distance to the
nearest object.
The virtual information layer has methods that
perform high level processing and present the
information to the control architecture. An example
of this kind of applications could be an emotion
recognition method that provides the control
architecture a string of data corresponding to a
sentence or word that the user has said to the system
with information about the intonation or the volume
to detect the emotion in the user. This method needs
information from the speech recognition method that
provides the spoken sentence or word and
information from the audio processing method that
provides details of the physical signal in order to
determine an emotion.
In Figure 2 we have represented two typical
communications between methods of the same layer.
For example, in the virtual information layer
communications could take place between the
method that calculates the distance and angle to all
the objects in the vision field of the robot and the
method that performs the translation of coordinates.
After presenting the general HABLA structure,
in the next section we will try to make it clearer
through robotic application examples.
3 PIONEER 2 WITH MDB
In order to show the basic operation of the HABLA
in a real experiment with a real robotic platform, we
have decided to reproduce the example presented in
(Bellas, 2005). In this experiment we used a wheeled
robot from Activmedia, the Pioneer 2 DX model,
and a deliberative control architecture developed in
our group called the Multilevel Darwinist Brain
(MDB) and first presented in (Duro, 2000).
The MDB is a general cognitive architecture that
has been designed to provide an autonomous robot
with the capability of selecting the action (or
sequence of actions) it must apply in its environment
in order to achieve its goals. The details of the MDB
are not relevant in this work and can be found in
(Bellas, 2005). In the experiment presented in that
paper we demonstrate the basic operation of the
MDB in a real robot with a high level task. As
commented before, the robot was a Pioneer 2 DX
robot, a wheeled robot with a sonar array around its
body and with a platform on the top in which we
placed a laptop where the MDB was executed.
Basically, the experiment consists on a teacher that
provides commands to the robot in order to capture
an object. The commands were translated into
musical notes perceived by a microphone. Initially,
the robot had no idea of what each command meant.
After sensing the command, the robot acts and,
depending on the degree of obedience, the teacher
provides a reward or a punishment through a
numerical value as a pain or pleasure signal
introduced via keyboard.
The main objective was to show that the MDB
allows the agent to create, at least, two kinds of
models that come about when modeling different
sets of sensors: one related to the sound sensor for
the operation when the teacher is present and an
induced model or models relating to the remaining
sensors. The robot will have to resort to these
models when the teacher is not present in order to
fulfill its motivations. In this experiment, an induced
behavior appears from the fact that each time the
robot applies the correct action according to the
teacher’s commands, the distance to the object
decreases. This way, once the teacher disappears, the
robot can continue with the task because it
developed a satisfaction model related to the
remaining sensors that tells it to perform actions that
reduce the distance to the object.
The execution of this experiment as explained in
(Bellas, 2005) involved the programming of all the
sensorial processing in the MDB. The sonar values
were processed in a function to calculate the
distance and angle to the object, and the audio signal
perceived through the microphone was analyzed and
treated in another function. The action selected by
the MDB was decoded into the Pioneer ranges in
another function that was programmed in the MDB.
As we can see, with this basic set up we were
overloading the laptop’s CPU with the low level
tasks and with the high level calculations (MDB).
At this point, we decided to introduce the
HABLA with the set of sensors and actuators of this
robot. Figure 3 shows the basic HABLA diagram
particularized for this example, with the methods
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
56
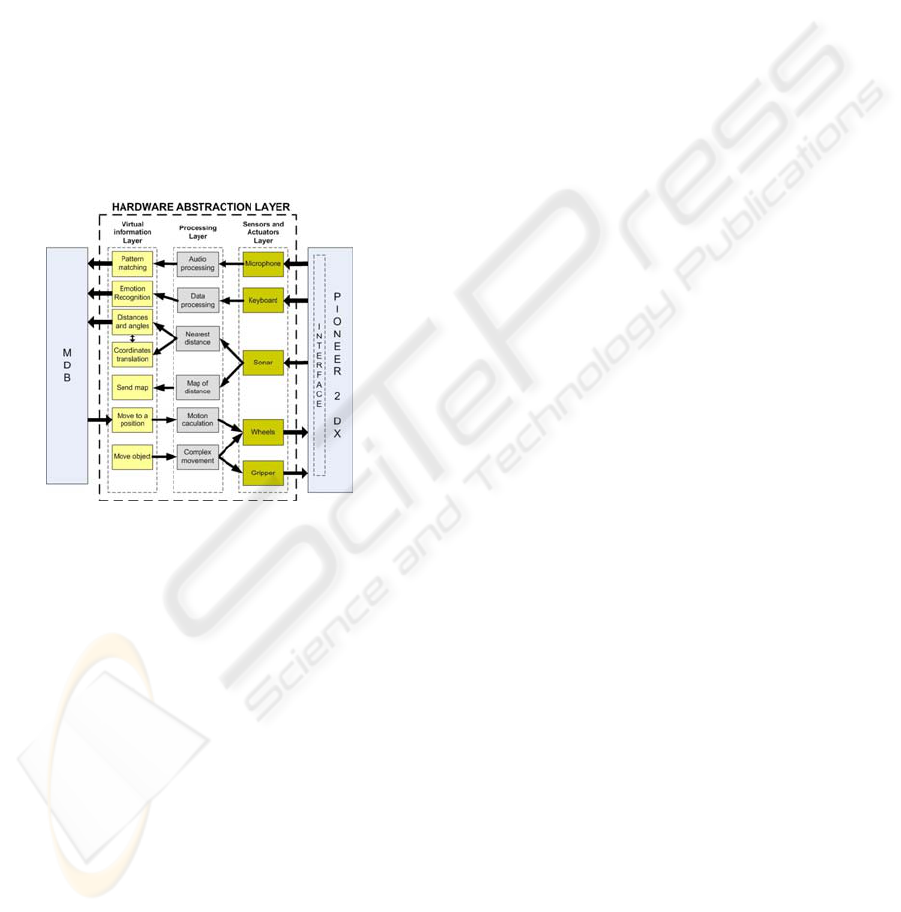
developed. In the sensors and actuators layer we
have five methods according to the sensors and
actuators used in the experiment. For example, the
Microphone method reads from a socket the sound
data received in the laptop’s microphone and
performs a basic filtering process to eliminate signal
noise and provides the data to the methods of the
next layer. In the processing layer, we have included
six methods that provide typical processed
information. For example, the Nearest Distance
method receives an array of sonar values, detects the
nearest one and provides this information to the
Distance and Angle method. In the last layer (virtual
information layer) we have programmed six high
level methods. To continue with the same example,
the Distance and Angle method calculates the angle
from the information provided by the Nearest
Distance method and sends the MDB the exact
distance and angle in a fixed socket.
Figure 3: HABLA diagram with the particular methods of
the Pioneer 2 robot.
With this basic implementation of the HABLA,
we have re-run the example presented in (Bellas,
2005) obtaining the same high level result, this is,
the Pioneer 2 robot autonomously obtained an
induced behavior. What is important in this
experiment is that, using the HABLA, the MDB
doesn’t have to compute low level processes. This
allows us to work with a more general version of the
architecture which is highly platform independent.
In addition, we can execute the MDB in a much
more powerful computer and use the laptop just for
the HABLA and the communications.
4 AIBO WITH MDB
Once the successful operation of the MDB with a
real robot has been shown, our objective is simply to
repeat the experiment but using a different robot, in
this case the robot is a Sony Aibo. The example is
the same as in the previous case from the control
architecture’s point of view, but, as the robot is
different, we have used a different group of sensors
and actuators. In this case, the Aibo robot has to
reach a pink ball it senses through a camera and the
commands are spoken words provided by the
teacher. In addition, the punishment or reward signal
is provided by touching the back or the head of the
robot, this is, using a contact sensor. The robot
movements are different and it is able to speak some
words through its speakers to show some emotion.
In this case, the experiment was performed in a
closed scenario with walls.
Figure 4 represents the HABLA with the new
methods included for this robot. The philosophy
behind the programming of the new methods is that
they should be as general as possible in order to be
useful for other robotic platforms similar, in this
case, to the Aibo robot. Furthermore, we can see in
Figure 4 that the previous methods developed for the
Pioneer 2 robot are still present and, as we will
explain later, some of them are used again.
The first thing we had to do in this experiment
was to program the low level routines in the
Interface layer of the Aibo robot using the Tekkotsu
development framework (Touretzky, 2005). In this
case, this tool follows the same idea as we use in the
HAL, and all the sensorial information from the
robot can be accessed by TCP sockets, so
programming cost involved was very low. In the
case of commands, Tekkotsu provides very simple
functions to move the legs with a given gait that are
accessed by sockets again.
In the sensors and actuators layer, we have
included very general methods to deal with sensors
such as a camera, infrared sensors, buttons or with
actuators like a head or a speaker. In the processing
layer we have included, as in the case of the Pioneer
robot, very general processing related with the new
sensors of the previous layer, such as image
segmentation or speech recognition. In fact, the
speech recognition method was the most important
development in this experiment because this feature
is not present in Tekkotsu software or in Sony’s
original framework. We think that owner-dog
communication through spoken words is very
important because it is a very intuitive way to teach
this robot. In fact, the speech recognition was
implemented using Sphinx-4 (Walker, 2004) which
is a speech recognizer written entirely in the Java
programming language. In our case, the Speech
Recognition method basically executes Sphinx-4,
which obtains the sound data from the microphone
method, and outputs a string of data with the
recognized word or phrase. In this case, we have
INITIAL DEVELOPMENT OF HABLA (HARDWARE ABSTRACTION LAYER) - A Middleware Software Tool
57

used a reduced grammar but Sphinx includes a
configuration file where more words or phrases can
be added, so the method is very general.
Aibo is
always sending the data of the two microphones to a
fixed port with a Tekkotsu behavior called
“Microphone Server”.
Figure 4: HABLA diagram with the particular methods of
the Aibo robot
As shown in Figure 4, in the processing layer we
find, for example, a method called Audio Processing
that was created for the Pioneer robot, and is reused
here. In the virtual information layer we have
created more abstract methods than in the previous
case, because the new sensors and actuators of this
robot (like the buttons in the back or the head)
permit us to create new methods such as Emotion
Recognition, that provide information to the MDB
related to the teacher’s attitude.
Finally, we must point out that the execution
result was successful, obtaining exactly the same
behavior as in the Pioneer robot (Bellas, 2006).
What is more relevant in this case is that there was
no time spent in MDB reprogramming, because
using the HABLA the low level processing was
absolutely transparent to the control architecture. In
addition, in this experiment we have executed the
Tekkotsu software on the Aibo’s processors, the
HABLA in another computer and the MDB in a
different one, optimizing this way the computational
cost.
5 CONCLUSIONS
In this paper we have presented the initial
implementation of the Hardware Abstraction Layer
(HABLA) middleware tool. Its main features are:
hardware devices independence, virtual sensing and
actuation capabilities, computational cost
distribution, control architecture independence,
scalability and operating system independence. We
have presented practical implementations of the
methods in the HABLA that support two very
different robotic platforms (Pioneer 2 and Aibo) in a
real application example using the MDB control
architecture. Currently, we are expanding the
HABLA concept to different application fields,
developing a practical example in an “intelligent”
room.
ACKNOWLEDGEMENTS
This work was partially funded by the Ministerio de
Educación y Ciencia through projects DEP2006-
56158-C03-02/EQUI and DPI2006-15346-C03-01.
REFERENCES
AIBO SDE webpage, 2007: http://openr.aibo.com/
ARIA webpage, 2006:
http://www.activrobots.com/SOFTWARE/aria.html
Bellas, F., Becerra, J.A., Duro, R.J., 2005. Induced
behaviour in a Real Agent using the Multilevel
Darwinist Brain, LNCS, Vol 3562, Springer, 425-434.
Bellas, F., Faiña, A., Prieto, A., Duro, R.J., 2006,
Adaptive Learning Application of the MDB
Evolutionary Cognitive Architecture in Physical
Agents, LNAI 4095, 434-445
Duro, R. J., Santos, J., Bellas, F., Lamas, A., 2000. On
Line Darwinist Cognitive Mechanism for an Artificial
Organism, Proc. supplement book SAB2000, 215-224.
Genesereth, M.R., Nilsson, N., 1987. Logical Foundations
of Artificial Intelligence, Morgan Kauffman.
Gerkey, B. P. , Vaughan, R. T., Howard, A., 2003. The
Player/Stage Project: Tools for Multi-Robot and
Distributed Sensor Systems, In Proc. of the
International Conference on Advanced Robotics, 317-
323.
Metta, G., Fitzpatrick, P. Natale, L., 2006, YARP: Yet
Another Robot Platform, International Journal on
Advanced Robotics Systems, 3(1):43-48
Michel, O., 2004. Webots: Professional Mobile Robot
Simulation, International Journal of Advanced
Robotic Systems, Vol. 1, Num. 1, 39-42.
Touretzky, D. S., Tira-Thompson, E.J., 2005. Tekkotsu: A
framework for AIBO cognitive robotics, Proc. of the
Twentieth National Conference on Artificial
Intelligence.
Utz, H., Sablatnög, S., Enderle, S., Kraetzschmar, G,
2002. Miro - Middleware for Mobile Robot
Applications, IEEE Transactions on Robotics and
Automation, Special Issue, Vol. 18, No. 4, 493-497.
Walker, W., Lamere, P., Kwok, P, Raj, B., Singh, R.,
Gouvea, E., Wolf, P., Woelfel, J., 2004. Sphinx-4: A
flexible open source framework for speech
recognition, Technical Report SMLI TR2004-0811,
Sun Microsystems, Inc.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
58
