
An Elementary Communication Framework for Open
Co-operative RoboCup Soccer Teams
Lu
´
ıs Mota
1,2
and Lu
´
ıs Paulo Reis
2
1
DCTI-Instituto Superior de Ci
ˆ
encias do Trabalho e da Empresa, Portugal
2
LIACC-Faculdade de Engenharia da Universidade do Porto, Portugal
Abstract. One of the present day challenges in RoboCup is the development of
Open Co-operative teams, where different research labs join efforts to build a
common team. Such teams bring together robots with heterogeneous hardware,
architectures and control software, which hinders straightforward co-operation.
The robots in these teams might co-operate through a-priori strategic knowledge
and structured communication during the game. This paper presents the kernel
of a communication framework, defining a robotic soccer vocabulary, as well as
rules to manage communication.
1 Introduction
id[0..1]: String
team[0..1]: String
playerNumber[0..1]: PositiveInteger
colour[0..1]: Colour
width[0..1]: PositiveDecimal
depth[0..1]: PositiveDecimal
height[0..1]: PositiveDecimal
averageSpeed[0..1]: PositiveDecimal
kickingDevice[0..1]: Boolean
kickReach[0..1]: Decimal
kickAngleCSU[0..1]: Angle
Player
OwnTeamPlayer
OpponentTeamPlayer
Fig.1. Player definition.
RoboCup
3
has the goal of ”By the year 2050, develop a team of autonomous robots
that can win against the human world soccer champion team.” This team will surely be
formed by heterogeneous robots, a selection of the best players, which will outperform
3
http://www.robocup.org
Mota L. and Paulo Reis L. (2007).
An Elementary Communication Framework for Open Co-operative RoboCup Soccer Teams.
In Proceedings of the 3rd International Workshop on Multi-Agent Robotic Systems, pages 97-101
Copyright
c
SciTePress

any single-origin team. If this is to be the case, how will such a team be built and
managed, and how will it play?
This subject has recently been the subject of a prospective analysis[1]. In the present
paper, a Communication Framework that leads to implementing these scenarios is de-
fined. To fulfil this scenario, there will be the need for a vocabulary relative to robotic
soccer, presented in section 2. The management of interactions between players during
the game must also be determined, and a proposal is made in section 3. Finally, we
present a summary and look into future work in section 4.
2 Robotic Soccer Domain Concepts
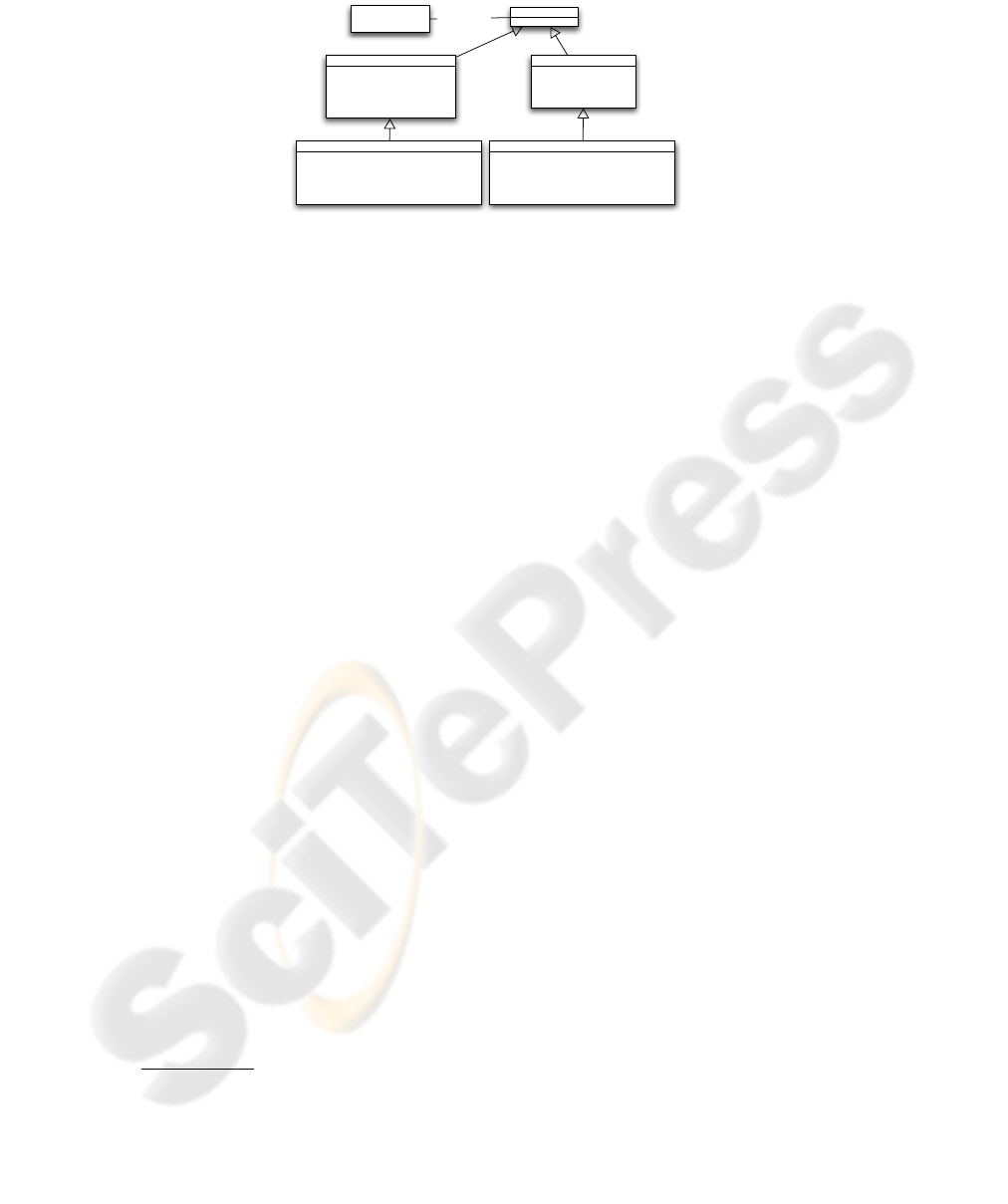
2.1 Physical Objects and Positioning
As pointed out in the scenario presented in [1], robots will have to share the world
state, having thus to use a proper vocabulary describing players. Information about
their colour and shape should also be expressable. They should be characterised by their
skills, like average motion speed and kicking device. This modelling can be seen as an
UML diagram in figure 1. Other relevant physical objects are the ball and the referee.
Positioning of objects should be shared among team-mates, to enhance the state of the
id[0..1]: String
height[0..1]: Decimal
trousersColour[0..1]: Colour
shirtColour[0..1]: Colour
Referee
id[0..1]: String
colour[0..1]: Colour
radius[0..1]: Decimal
Ball
id[0..1]: String
(...)
Player
PhysicalObject
Fig.2. Physical Objects.
world. The absolute pose of an object is based on a right-hand cartesian co-ordinate
system, with the origin placed at the centre of the field, the x-axis pointing at the blue
goal and the z-axis up. The robot’s orientation, i.e., the direction it is facing, is modelled
as a yaw angle relative to the x-axis on the xy plane. The full definition can be found in
figure 3.
The uncertainty in positioning determination must be dealt with. In fact, no mea-
surement is entirely reliable and different sensors introduce different kinds of uncer-
tainty. We chose to use the Standard Uncertainty[2]. AbsolutePositioningWithSU ex-
tends ’AbsolutePositioning’. There can also be uncertainty about the identity of the ob-
served object (targetIdentificationConfidence). In the scenario in [1], most of the posi-
tioning exchanged are determined from the viewpoint of the robot, and are thus relative
to it. The class (RelativePositioning) represents relative positioning with respect to the
observer, useing polar co-ordinates. ’RelativePositioningWithSU’ extends the former.
Coach-Unilang[3] introduces a definition of field regions, including predefined areas
and freely definable areas like circles, which will be included in this framework.
x: Decimal
y: Decimal
z[0..1]: PositiveDecimal
yaw[0..1]: Angle
AbsolutePositioning
observerID: String
theta: Angle
distance: PositiveDecimal
altitude [0..1]: PositiveDecimal
yaw[0..1]: Angle
RelativePositioning
Positioning
targetIdentificationConfidence[0..1]: Decimal
thetaSU[0..1]: Angle
distanceSU[0..1]: PositiveDecimal
altitudeSU[0..1]: PositiveDecimal
yawSU[0..1]: Angle
RelativePositioningWithSU
targetIdentificationConfidence[0..1]: Decimal
xSU[0..1]: Angle
ySU[0..1]: PositiveDecimal
zSU[0..1]: PositiveDecimal
yawSU[0..1]: Angle
AbsolutePositioningWithSU
PhysicalObject
hasPosition
0..1
1
Fig.3. Positioning related concepts.
2.2 Game Events, Player Moves, Actions and Tactics
During the game, some events occur and may be reported to team-mates, since they are
relevant to the world state. Such events are related to temporarily absent players, which
may influence decisions or even strategy changes. These events are: sentOff(player),
returnedToGame(player), malfunctioning(player) and functioning(player).
Co-operation can be enhanced by the intentional exchange of messages to co-ordinate
robots’ behaviour. When a robot well positioned to score a goal decides to ask its
team-mate holding the ball to perform a pass. Coach-Unilang[3] defines a set of ac-
tions, which will be used. Some of these actions have added arguments. These ac-
tions and moves are: shoot(), pass(player), forward(fieldRegion), dribble(direction),
run(direction), hold(), clear(), intercept(), tackle(player), mark( player), markPassLine
(player1, player2), gotoBall() and move(fieldRegion).
Tactics define the players’ preferred positioning on the field, as well as the team’s
pressure and mentality. These definitions will influence the players’ options. During a
game, a tactics change may have to be communicated to all the players. A set of classes
for this purpose can be seen in figure 4. Most of the attributes in the ’Tactics’ class have
a discrete set of possible values, e.g. from veryDefensive to veryOffensive or from 0 to
100. There are predefined formations, like 442 and 433. There may be the need to use
arbitrary formations, using the ArbitraryFormation class, as represented in figure 4 by
FormationPosition. In this class, the positioning of each player is characterised by an
horizontal and vertical position. playerRole will define the attitude of the player.
3 Inter-robot Communicative Interactions
Since the information in the previous section is to be shared between heterogeneous
agents, one also needs to establish how this exchange will be managed. The autonomous
agents’ community has been dealing with these problems for several years, and one can
profit from the results previously obtained.
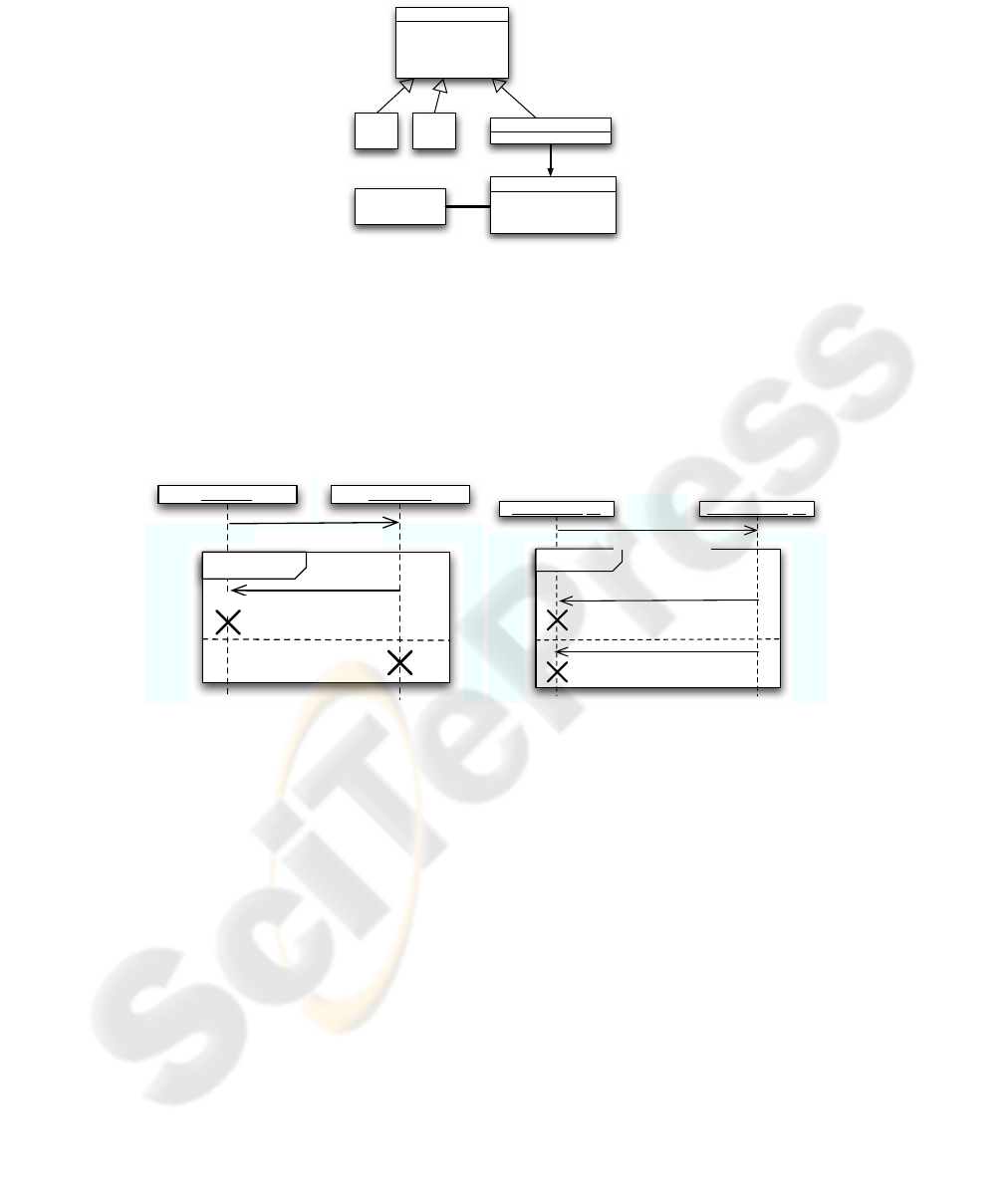
The transmission of observed information needs only a simple interaction, where
one player (Sender) will inform some other players (Receivers). The acknowledgement
is optional. This interaction protocol is represented as an AUML diagram
4
. This proto-
4
http://www.auml.org
teamMentality[0..1]
gamePace[0..1]
teamPressure[0..1]
riskTaken[0..1]
Tactics
433 442 ...
ArbitraryFormation
verticalPosition
horizontalPosition
playerRole[0..*]
FormationPosition
Player
1..11
1 1
Fig.4. Tactics related concepts.
col will also be used to advertise choices. An example, where a robot informs others that
it intends to shoot at the opposite goal, uses the intends (I) operator[4], is as follows:
(inform :sender robot1 :receiver robot2 (...) :contents (I robot1 (shoot)))
Sender Receiver
inform(Contents)
acknowledge(Contents)
alternative
Sender: Player
alternative
Receiver: Player
request(Action)
accept(Action)
refuse(Action)
Fig.5. Inform and Request interaction protocols.
Other interactions are more complex: if a player wants a team-mate to perform a
specific action, it will have to request this action, and the requested player will have
to either accept or reject the request. Such an interaction resembles the FIPA Request
Protocol[5] (figure 3).
4 Summary, Conclusions and Future Work
A communication framework has been defined, contributing to the development of
joint, multi-partner, heterogeneous, co-operative and open RoboCup soccer teams. This
framework introduces a vocabulary defining a fundamental set of concepts needed by
robots during a match. Two kinds of interactions have been defined. The first kind al-
lows robots to share information about the game and their individual intentions. The

second enables momentary co-operation that will lead to more complex moves involv-
ing several robots.
This framework is therefore a fundamental set of concepts and protocols for robots
to communicate. In order to take co-operation to a higher level, it will need concepts
such as role changes and set plays. Further, there is also the need for game statistics,
which enable the modelling of the opponent team and could be the basis for a better
choice of tactics, prior to and during the game. All these concepts will be considered in
the future as possible extensions.
References
1. Mota, L., Reis, L.P., Burkhard, H.D.: Communication challenges raised by open co-operative
teams in robocup. In: Encontro Cient
´
ıfico do Festival Nacional de Rob
´
otica 2006. (2006)
2. ISO: Guide to the expression of uncertainty in measurement. International Organization for
Standardization (ISO). (1995)
3. Reis, L.P., Lau, N.: Coach unilang - a standard language for coaching a (robo) soccer team.
In Birk, A., Coradeschi, S., Tadokoro, S., eds.: RoboCup-2001: Robot Soccer World Cup V.
Volume 2377 of Lecture Notes in Artificial Intelligence., Berlin, Springer Verlag (2002) 183–
192
4. FIPA: FIPA SL Content Language Specification. Foundation for Intelligent Physical Agents.
(2002)
5. FIPA: FIPA Request Interaction Protocol Specification. Foundation for Intelligent Physical
Agents. (2002)
