
PC-SLIDING FOR VEHICLES PATH PLANNING
AND CONTROL
Design and Evaluation of Robustness to Parameters Change
and Measurement Uncertainty
Mariolino De Cecco, Enrico Bertolazzi, Giordano Miori, Roberto Oboe
Dep. Mech Struct Eng, University of Trento, Via Mesiano 77, Trento, Italy
Luca Baglivo
Dept. Mech. Eng., Universit of Padova, via Venezia 1, Padova, Italy
Keywords: Wheeled Mobile Robot, WMR, path generation, path control, nonholonomic, clothoid.
Abstract: A novel technique called PC-Sliding for path planning and control of non-holonomic vehicles is presented
and its performances analysed in terms of robustness. The path following is based upon a polynomial
curvature planning and a control strategy that replans iteratively to force the vehicle to correct for deviations
while sliding over the desired path. Advantages of the proposed method are its logical simplicity,
compatibility with respect to kinematics and partially to dynamics. Chained form transformations are not
involved. Resulting trajectories are convenient to manipulate and execute in vehicle controllers while
computed with a straightforward numerical procedure in real-time. The performances of the method that
embody a planner, a controller and a sensor fusion strategy is verified by Monte Carlo method to assess its
robustness to parameters changes and measurement uncertainties.
1 INTRODUCTION
Path generation and control is the problem of
determining a feasible set of commands that will
permit a vehicle to move from an initial state to a
final state following a desired geometrical figure in
space while correcting for deviations in real time.
While this problem can be solved for manipulators
by means of inverting nonlinear kinematics, the
common inverse problem for mobile robots is that of
inverting nonlinear differential equations.
A basic method is therefore to plan a geometric
path in the surface of motion, generally a 2D space,
and conceive a suitable control strategy to force the
vehicle to follow it. If the path is feasible its tracking
will be accurate, otherwise there will be non
negligible differences between the planned and the
executed path.
If one plan a continuous curvature path, than can
be sure of its compatibility with respect to
kinematics and partially to dynamics if the
maximum rate of curvature variation is taken into
consideration. This for a huge variety of vehicles. As
a matter of fact differential drive, car-like and all-
wheel steering vehicles have constraints in curvature
variation while moving.
Various methods have been employed to plan
smooth trajectories (Rodrigues 2003). Some of them
use splines (Labakhua 2006, Howard 2006, Solea
2006), other employ clothoids, generally in its linear
curvature representation, to concatenate straight line
segments with circumference arcs (Nagy 2000,
Labakhua 2006). To cope with more complex
representation of curvature, a method for trajectory
planning based upon parametric trajectory
representations have been developed (Kelly 2002).
The method employs a polynomial representation of
curvature. This is still a research field, obviously not
for the geometric representations in itself (Dubins
1957), for the definition of numerical algorithms and
control strategies efficiently employable in Real
Time and for the systematic investigation of their
robustness to parameters changes and measurement
uncertainties.
Starting from the method of Kelly, we optimised
the search strategy in order to extend the converging
11
De Cecco M., Bertolazzi E., Miori G., Oboe R. and Baglivo L. (2007).
PC-SLIDING FOR VEHICLES PATH PLANNING AND CONTROL - Design and Evaluation of Robustness to Parameters Change and Measurement
Uncertainty.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 11-18
DOI: 10.5220/0001634400110018
Copyright
c
SciTePress

solutions. We also added a control algorithm that is
perfectly integrated with the planning method.
The result is a Polynomial Curvature Sliding
control, PC-Sliding, a novel RT procedure for
planning and control that can be summarised as
follows. The steering commands are designed by
means of the polynomial curvature model applying a
two-point boundary value problem driven by the
differential posture (pose plus curvature). While
following the path the vehicle replans iteratively the
path with a repetition rate that must not necessarily
be deterministic. To the actual curvilinear coordinate
it is added a piece forward, than computed the
corresponding posture in the original planned path,
finally replanned the differential path steering the
vehicle from the actual posture to the one just
computed. The result is to force the vehicle to
correct for deviations while sliding over the desired
path. Those little pieces of correcting path have the
property of fast convergence, thanks also to an
optimised mathematical formulation, allowing a
Real Time implementation of the strategy.
Advantages of the proposed method are its
essentiality thanks to the use of the same strategy
both for planning and control. Controlling vehicles
in curvature assures compatibility with respect to
kinematics and partially to dynamics if the
maximum rate of curvature variation is taken into
consideration. The method doesn’t need chained
form transformations and therefore is suitable also
for systems that cannot be transformable like for
example non-zero hinged trailers vehicles (Lucibello
2001). Controls are searched over a set of admissible
trajectories resulting in corrections that are
compatible with kinematics and dynamics, thus
more robustness and accuracy in path following.
Resulting trajectories are convenient to manipulate
and execute in vehicle controllers and they can be
computed with a straightforward numerical
procedure in real-time. Disadvantages could be the
low degrees of freedom to plan obstacle-free path
(Baglivo 2005), but the method can readily be
integrated with Reactive Simulation methods (De
Cecco 2007), or the degree of the polynomial
representing curvature can be increased to cope
with those situations (Kelly 2002, Howard 2006).
Parametric trajectory representations limit
computation because they reduce the search space
for solutions but this at the cost of potentially
introducing suboptimality. The advantage is to
convert the optimal control formulation into an
equivalent nonlinear programming problem faster in
terms of computational load. Obviously the dynamic
model is not explicitly considered thus missing
effectiveness in terms of optimisation (Biral 2001).
By means of this iterative planning sliding
control strategy we obtain a time-varying control in
feedback which produces convergence to the desired
path, guaranteeing at the same time robustness. In
particular, small non-persistent perturbations are
rejected, while ultimate boundedness is achieved in
the presence of persistent perturbations.
Verification of stability convergence and
robustness can be achieved analytically or
statistically. The first way has the merit to synthesise
the results in a general and compact fashion. By
means of its analytic representation it is mostly easy
to isolate the influence parameters and quantify its
effect. The second way has the merit to cope easily
with complex models where interact different
effects. In the present paper we aim at verifying the
performances of the proposed method that embody a
planner, a controller and a sensor fusion strategy for
the vehicle pose estimation that takes into account
an iterative measurement system and an
environment referred one (De Cecco 2003, De
Cecco 2007). The fusion technique takes into
account also systematic effects. This last part
interacts with the control strategy injecting step
inputs of different entity at each fusion step. For the
above reasons we decided to take the second way of
verification employing a Monte Carlo method.
Generally research focuses on control or
measurement goal separately. Seldom the deep
interaction between them is taken into consideration.
In this work the whole system robustness is
investigated by simulation.
2 PATH PLANNING AND
CONTROL PROBLEMS
The main problem with Wheeled Mobile Robots
path planning and control tasks is well known and
it’s strictly related to the nonholonomic constraints
on velocity. These constraints limit possible
instantaneous movements of the robot and cause the
number of controlled states to be less than the
control inputs one. WMR state equations constitute
a non linear differential system that cannot be solved
in closed form in order to find the control inputs that
steer the robot from an initial to a goal posture
(position, heading and curvature). As a consequence
also the control task is non standard with respect to
the case of holonomic systems like the most part of
manipulators. A suitable control law for precise and
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
12
fast mobile robots path following should compute
feasible inputs that generate correcting paths
compliant with nonholonomic constraints.
2.1 Generalized Clothoids
Since the robot velocity vector (and therefore its
forward axis) has to be aligned with the path
tangent, it is natural and convenient to include the
curvature as a state while describing the robot state
equations. In fact the curvature is directly related to
the steering actuator input, therefore its continuity is
an important issue to prevent path following
deviations due to the planning phase.
A system state model that can be used for a car-
like or differential drive robot is:
() cos ()
() sin ()
() ()
() ()
δ
δ
δ
=
=
=
=
x
ss
ys s
sks
ks us
(1)
where the state vector (posture) consists of the
position coordinates x, y, heading
δ
and curvature k.
Assuming, without losing generality, that k(s) is a
control input, the last equation in (1) can be omitted.
The derivatives are expressed with respect to the arc
length s rather than time, considering the robot
velocity as an independent input that doesn’t affect
the path geometry except for actuators dynamics
limitation.
Choosing for curvature a third order polynomial
in arc length allows to steer the robot from a given
starting to a final posture along a feasible smooth
path. In other words, the problem is that of
generating a continuous curvature path connecting
the two end-postures :
x( ) = [0 0 0 ]
x( ) [ ]=
00
fffff
s ,,,k
sx,y,δ ,k
(2)
The first constraint in equation (2) is anyway
general if the reference system is placed with its
origin at the initial position and oriented aligned
with the initial heading. In this way the first three
constraints are automatically satisfied and problem
is reduced to satisfy the remaining five constraints,
that is initial curvature and final posture.
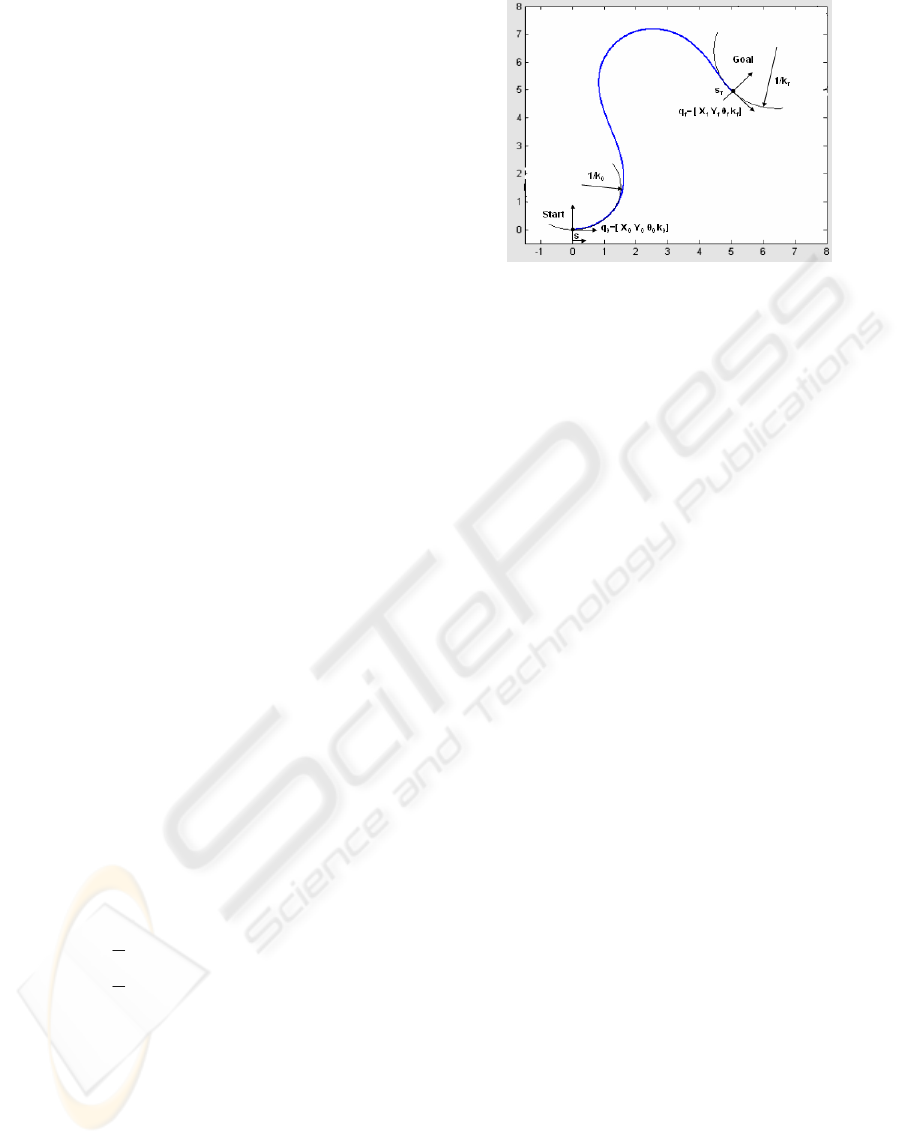
Figure 1: Continuous cubic curvature path planning. A
solution example.
The problem requires the solution of a nonlinear
differential equations system. In fact, while the
heading is obtained as a simple integration of the
curvature polynomial, the calculation of the
cartesian position [x, y] requires the numeric
integration of generalised Fresnel integrals. An
effort to solve the inverse two points boundary
problem (Figure 1) is worth thanks to the many
advantages that this formulation leads to. The aim is
to calculate five parameters, that in this case are the
four coefficients of the curvature polynomial, and
the total arc length s
f
. Once the calculation algorithm
has been designed and optimised, one could have, in
a few parameters, a representation of the planned
path that is nonholonomic compliant and can be
generated in real time. Examples can be an
autonomous path planning of a fork lift which have
to reach a detected pallet or to control a car in a fully
automated car parking. Besides, part of the solving
algorithm is exploited to generate the forward
integration of the curvature polynomial and the input
curvature can be applied to a large variety of WMR,
according to the kinematic model and dynamic
constraints, without changing the planning and
control algorithm.
3 THE PROPOSED METHOD
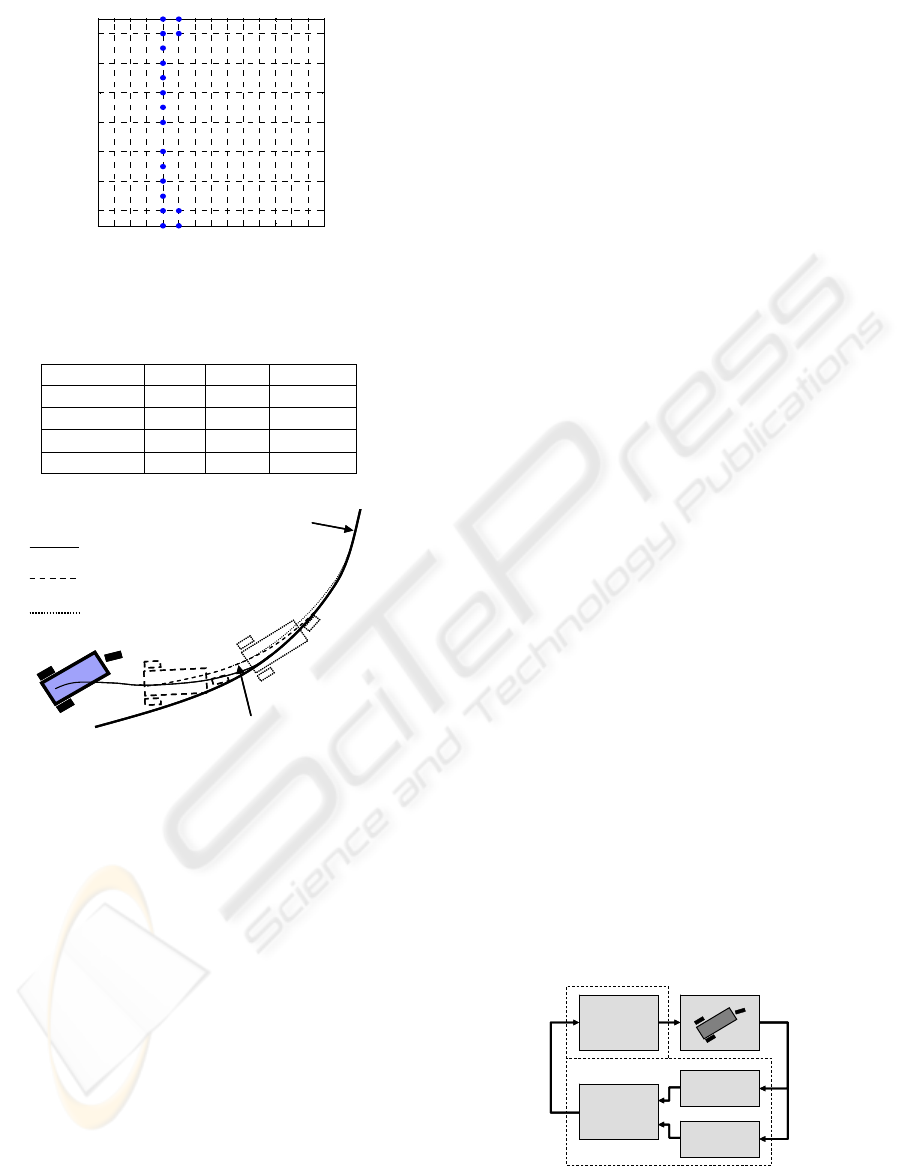
Starting from the method of (Kelly 2002), we
optimised the search strategy in order to extend the
converging solutions upon a large range of possible
final configurations (Figure 2).
The control algorithm we designed has revealed
to be efficient and very well integrated with the
planning method. It uses the same planning
algorithm to calculate feedback corrections,
asymptotically reducing servo errors to the reference
path.
PC-SLIDING FOR VEHICLES PATH PLANNING AND CONTROL - Design and Evaluation of Robustness to
Parameters Change and Measurement Uncertainty
13
-4 -3 -2 -1 0 1 2 3 4 5 6 7 8 9 10
-6
-4
-2
0
2
4
6
x[ m]
Y[ m]
Map of non converging solutions
Figure 2: Validation map of end postures without
convergence.
Table 1: Validation range.
Parameter Min Max Step
x 0 10 1 m
y -7 7 1 m
δ
-π/2
π/2
0.1 rad
k -0.1 0.1 0.02 m
-1
path (k)
path (k+1)
path (k+2)
PC sliding
reference
path
P
k+1
P
k+2
P
k
path (k)
path (k+1)
path (k+2)
PC sliding
reference
path
P
k+1
P
k+2
P
k
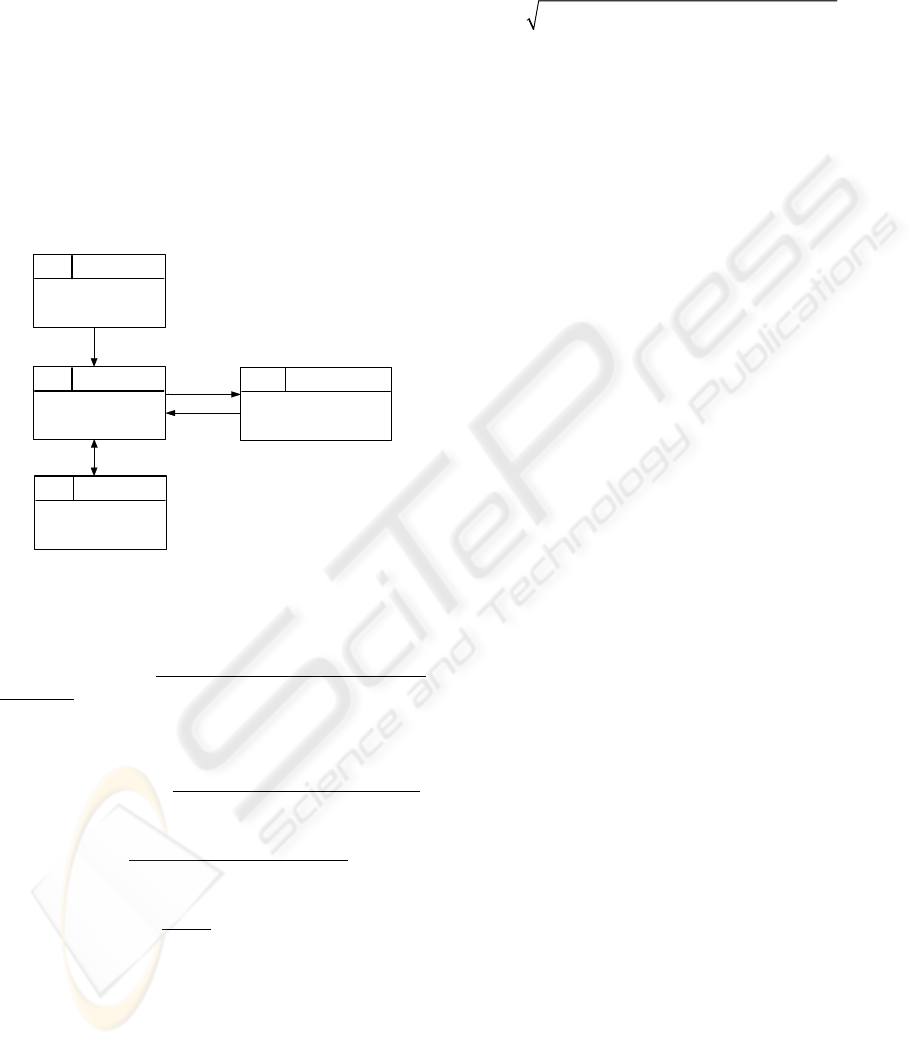
Figure 3: Schematic representation of the control method.
At k·T
PC
time-spaced instants a PC-sliding path is
computed to reach a sliding subtarget thus forcing the
robot to keep the desired planned PC path.
The whole algorithm can be summarized as
follows:
[Initialisation]
a) a reference PC path is planned, mapping the
arc length interval [0, s
f
] into the postures
[x(s), y(s),
δ
(s), k(s)], that describe the robot
posture evolution from an initial posture
defined P
0
= [x
0
, y
0
,
δ
0
, k
0
] to the final
desired posture P
f
= [x
f
, y
f
,
δ
f
, k
f
] within
defined tolerances;
b) at initial condition the robot is placed in any
initial posture also different from P
0
;
c) if initial planning was successful (all
constraints satisfied), start moving at
constant velocity V.
[Loop at T
PC
cycle time]
d) get actual position estimate and compute
the minimum distance position on the main
reference path and its corresponding arc
length s. Add to s an additional defined
length,
Δ
s, proportional to velocity.
If s +
Δ
s < s
f
s
g
= s +
Δ
s, otherwise s
g
= s
f
;
e) compute the correcting PC path by applying
point b) to plan a path between actual
posture and that mapped by s
g
on the
reference PC path [x(s
g
), y(s
g
),
δ
( s
g
), k(s
g
)],
see Figure 3, path(k);
f) If s +
Δ
s > s
f
. Reduce velocity, set the
steering input according to the input
curvature k;
g) set the steering input according to the input
curvature k;
h) if final boundary condition is satisfied then
STOP;
i) GO TO point d)
4 IMPLEMENTATION
Real time feasibility was analyzed taking in mind
possible applications of industrial AGV transpallet.
The simulation tests, reported in §5.1, showed good
results in terms of fastness, low overall tracking
error and robustness. The RT implementation is at
the phase of Real Time cycle time verification and
architecture design.
4.1 Simulation
Simulations were carried out involving a three
wheeled robot (De Cecco 2003): 500 mm wheelbase
and a 50 mm front wheel radius. The path control
model incorporates the path planning and control.
The actuators dynamics is taken into account. A
model of a sensor fusion technique closes the loop
by feeding the current posture to the path controller
(see Figure 4). The sensor fusion algorithm
combines odometric and triangulating laser pose
estimates also taking into account systematic and
random effects (De Cecco 2007).
Odometric
Estimation
Sensor
Fusion
Laser
Estimation
Path
Control
Odometric
Estimation
Sensor
Fusion
Laser
Estimation
Path
Control
Figure 4: Logic scheme of the simulation model.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
14
The simulated vehicle has two control inputs,
velocity and steering angle of the front wheel. The
actuators dynamics are simulated by means of first
order model with a time constant for the steering
mechanism of 0.1 s and that of the driving motor of
0.5 s. PC sliding method is updated with a refresh
cycle time T
PC
of 0.015 seconds. A value of s
f
/20 for
Δs was used for driving velocity of 1.5 m/s.
4.2 RT Implementation
The PC-sliding algorithm was implemented on a
National Instruments 333 MHz PXI with embedded
real-time operating system (Pharlap).
Environment referred
me asu re men t
Tc=10
ms
TAS K 1
[High Priority]
- POSE ESTIMATION
-Low level actuation
Tc=4
ms
TAS K 3
[Critical Priority]
COM MUNICATION WITH
LASER
Tc=15
ms
TASK 2
[Above Normal Priority]
PC-Sliding Path
Controller
Posture
Setpoint
Tc=50
ms
TAS K 4
[Normal Priority]
COM MUNICATION WITH
CLIENT
User data
Figure 5: architecture for real time implementation.
The designed and preliminary verified software
architecture has four main tasks (see Figure 5):
• TASK 1 – Pose estimation & Low level
actuation: computes the best pose estimate starting
from odometers and laser data and computes the
reference commands to the drivers according to the
actual planned path.
• TASK 2 – PC-Sliding Path Controller
:
computes the corrective control action based upon
its current pose and the target one;
• TASK 3 – Communication with Laser
: acquires
the new pose measurement from laser when ready
and makes it available for task 1
• TASK 4 – Client
: communicates with a
reference station to manage the missions start-stop,
acquire and store data, etc.
The priority (static-priority) of the tasks was
assigned according to rate monotonic algorithm
which assign the priority of each task according to
its period, so that the shorter the period the higher
the priority.
Mean calculation times were measured for the
PC-sliding planning algorithm. After optimisation a
large number of paths were computed. The iteration
termination condition was triggered when a
weighted residual norm defined as:
22 22
()()( )()
xf yf f kf
rwx wy w wk
δ
δ
=Δ+Δ+Δ+Δ
(4)
is under a threshold of 0.001, and the weights are
computed in such a way that a fixed error upon final
x
f
or y
f
or
δ
f
or k
f
, alone exceed the threshold. First
two weights in equation (4) were chosen equal to 1
m
-1
, last two weights were chosen to be equal to the
root square of ten. The computation time over all the
iterations showed in Figure 2 (only paths converging
under threshold) spanned from a minimum of
0.0003 to a maximum of 0.005 seconds. The
termination condition was thought to obtain a
feasible path for an industrial transpallet that has to
lift correctly a pallet.
5 VERIFICATION
In this work the whole system robustness is
investigated by simulation. We decided to evaluate
statistically rather than analytically the convergence
and the stability of the proposed method. The main
motivation is the aim to investigate not only the
influence of system delays and parameters bias on
the control, but also the interaction between a near-
reality measurement system used as the source of
feedback to the path controller. Monte Carlo
analysis is a powerful tool for this kind of tasks.
5.1 Simulation Results
Simulations were aimed at verifying control
robustness toward different aspects related to:
A. approximation of forward integration;
B. actuators delay and inaccuracy
C. non ideal initial conditions
D. control model parameters uncertainty
E. pose measurement noise
For all the tests the maximum following absolute
residual eps_path and final position residual eps_fin
were computed in meters.
A. The planned path is not an exact solution
because of generalized Fresnel integrals cannot be
solved in closed form and a reasonable computation
time is required for real time implementation.
Therefore a planning solution is accepted if the
termination condition is satisfied. First simulation
test was about verifying the vehicle model
implementation in ideal conditions, that is without
PC-SLIDING FOR VEHICLES PATH PLANNING AND CONTROL - Design and Evaluation of Robustness to
Parameters Change and Measurement Uncertainty
15
actuator dynamics, using nominal model parameters
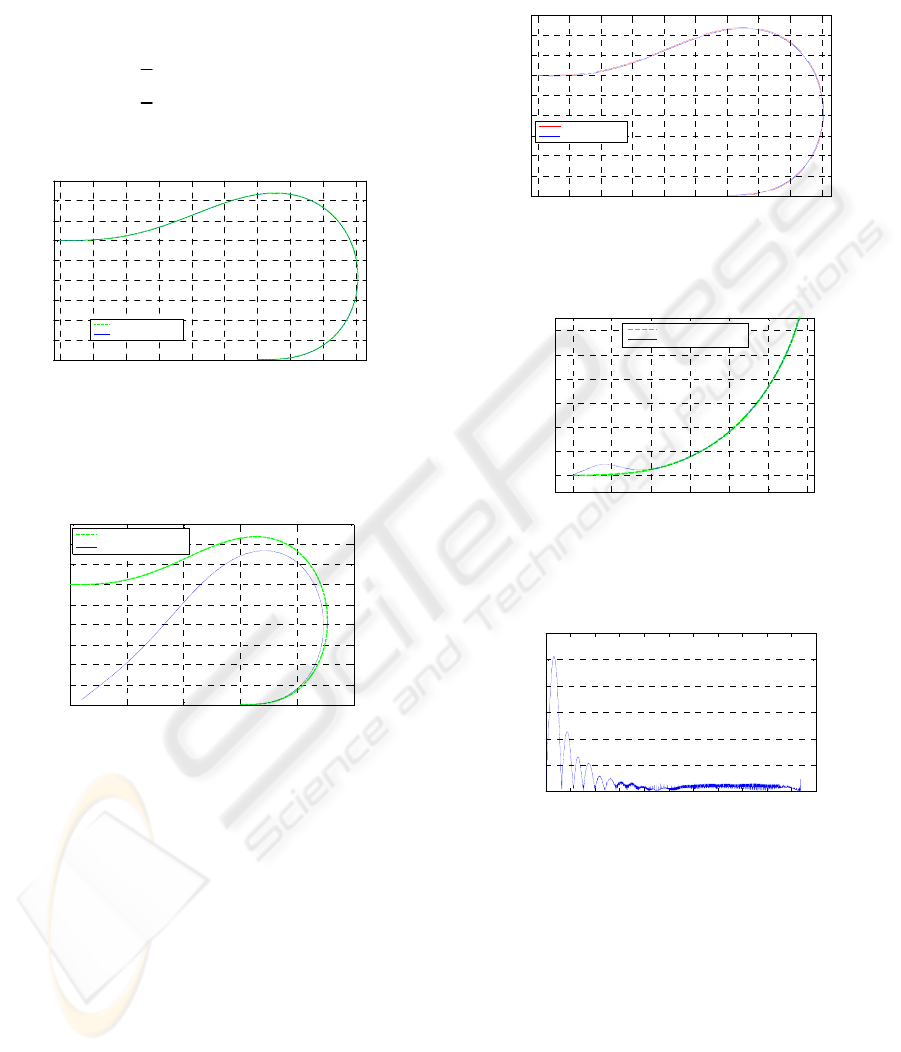
and starting from ideal initial boundary conditions.
The path in Figure 6 has been chosen as the
representative path for the analysis. Boundary
conditions are:
x(0)=[0000]
x( ) [-6,3,π,0]=
f
,,,
s
(5)
-6 -5 -4 -3 -2 -1 0 1 2 3
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
Paths of Open Loop Simulation
x[m]
y[m]
Planned Path
Simulated True Path
Figure 6: open loop ideal path, only approximation affect
the following and final residual in this case.
eps_path= 0.007 m, eps_fin = 10
-4
m .
-6 -4 -2 0 2 4
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
Open Loop Path with Steering Bias and Dela
y
x[m]
y[m]
Planned Path
Simulated True Path
Figure 7: Open loop path with steering actuator biased and
delayed.
B. Without changing any condition with respect
to case A. except for the introduction of a dynamic
steering actuator model with a time constant of 0.1
seconds and a steering actuator bias of 1 degree the
resulting path is the one in Figure 7. To note that the
effect of the steering actuator is the most significant,
while the actuator delay effect is negligible. A proof
is that the simulated true path closes the bend more
than required.
Benefit of the proposed feedback controller can
be seen just making a comparison between the open
loop 1 degree steering angle biased case in Figure 7
and that in Figure 8 which is a result of close loop
applying in the case of 5 degree biased steering
actuation angle. The last could be considered a worst
case due to heavy mechanical skew or simply to bad
steering servo actuation. In this simulation the
residuals were eps_path = 0.026 m, eps_fin = 4·10
-4
m.
-6 -5 -4 -3 -2 -1 0 1 2 3
0
0. 5
1
1. 5
2
2. 5
3
3. 5
4
4. 5
Closed loop with steering 5° bias and delay
x[ m]
y[m]
Planned Path
Simulated True Path
Figure 8: Close loop path with biased steering input angle
0 0.5 1 1.5 2 2.5 3
0
0.2
0.4
0.6
0.8
1
1.2
Initial Heading Error Simulation
x[ m]
y[m]
Planned Path
Simulated True Path
Figure 9: PC-sliding convergence to the reference path
starting from an initial heading of 15 degrees.
0 1 2 3 4 5 6 7 8 9 10 11
0
0. 02
0. 04
0. 06
0. 08
0. 1
0. 12
Time [s]
Foll owing Error [m]
Following Error VS Time
Figure 10: Residuals of the path following of the previous
figure.
C. Another significant simulation is the one
concerning with a non ideal initial condition: an
initial heading difference of 15 degree from the
aligned condition (Figure 9). In this case steering
delay is accounted too.
In Figure 10 it is showed that the following
absolute residual decreases asymptotically
remaining always bounded within reasonable values.
D. A set of simulations concerning the
robustness with respect to control parameters
uncertainties has been achieved. A Monte Carlo
approach was employed to analyse control
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
16
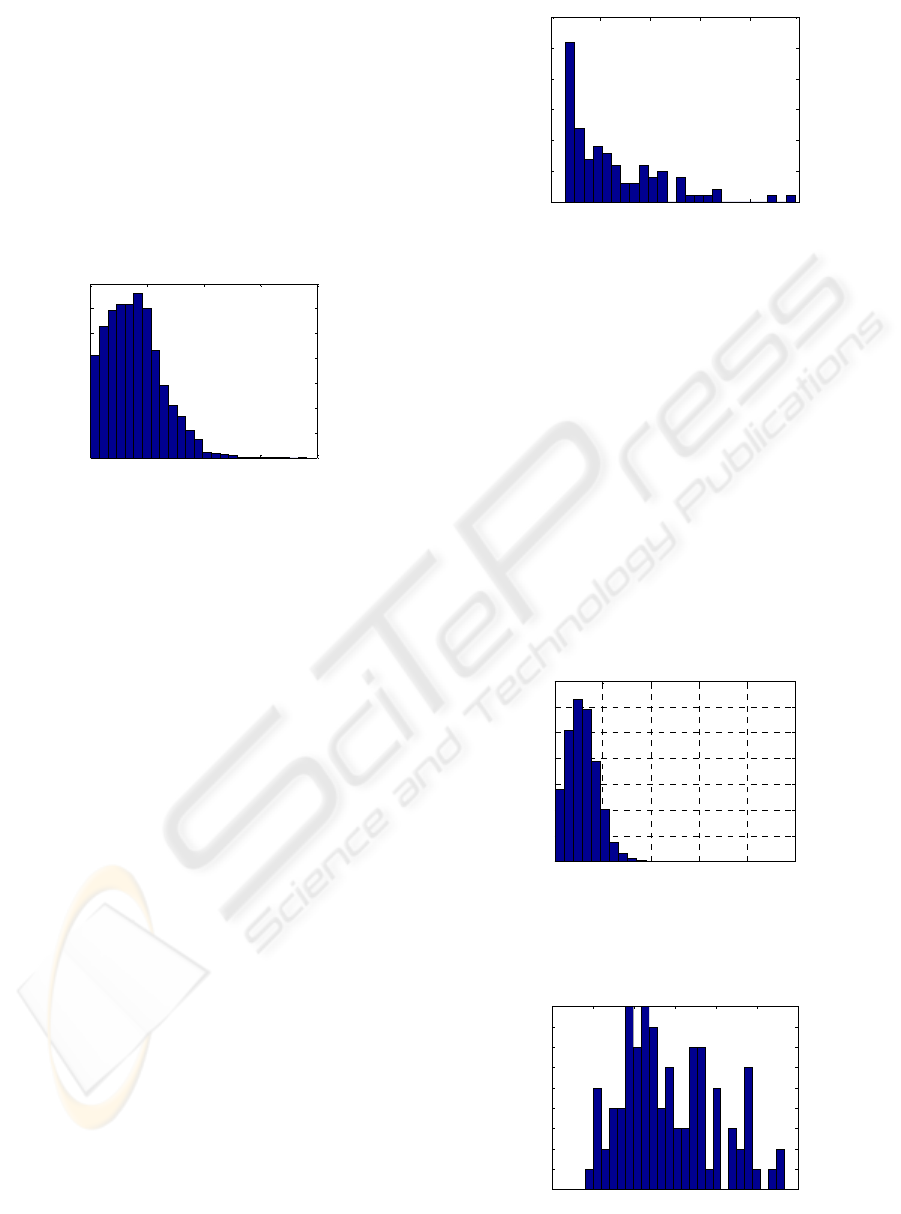
performances when an iterated randomized set of
control parameters is used to carry out a PC-sliding
path following task. More precisely, at each iteration
step the parameters b (wheelbase) and
α
0
(steering
angle for a theoretical straight path) are randomly
drawn from a normal unbiased distribution with
standard deviation σ
b
and σ
α
and then a complete
simulation, with same boundary constraints of the
previously presented cases, is done. Setting σ
b
=
0.002 m and σ
α
= 1 deg, the performance results are
those shown in Figure 11 and Figure 12.
0 0.005 0.01 0. 015 0.02
0
0.5
1
1.5
2
2.5
3
3.5
x 10
4
Error [m]
Occurency []
Path Following Residuals
Figure 11: Position residuals along each trial path
computed for each replan points at T
PC
rate.
In this simulation the residuals were eps_path =
0.019 m, eps_fin = 10
-4
m.
E. Last simulation tests are related to the
analysis of control robustness with respect to pose
measurement uncertainty. The first testing was made
by feeding simulated fused pose measurements to
the PC-sliding control algorithm. The measurement
simulation model involves a sensor fusion algorithm
that combines an odometric pose with a triangulating
laser estimate (see Figure 4). While the odometric
path estimate is smooth but affected by increasing
systematic errors with time, the laser sensor
furnishes unbiased but noisy pose measurements.
The sensor fusion algorithm compounds better
characteristic of the two measurement systems, but
the fused pose remains anyway affected by a certain
bias and by a certain noise. The parameters used for
the odometric model are the wheel radius R, the
wheelbase b and the steering angle offset α
0
. It was
set σ
b
= 0.002 m , σ
R
= 0.0005 m and σ
α
= 0.1 deg
for kinematic model parameters uncertainties. For
the laser pose measurement is reasonable to set the
standard deviation σ
x
= σ
y
=
0.015 m and that of
robot attitude as σ
δ
= 0.002 rad. All the parameters
are ideal. Only the laser estimate is affected by noise
influencing the fused pose proportionally to
odometric uncertainty. Simulation residuals are
reported in Figure 13 and Figure 14. In this
simulation the residuals were eps_path = 0.024 m,
eps_fin = 0.013 m.
0 0.2 0.4 0.6 0.8 1
x 10
-4
0
5
10
15
20
25
30
Err or [ m]
Occurency []
End Point Residuals Histogram
Figure 12: End-point residuals, one for each trial path.
Finally we carried out a simulation set where all
the influencing factors were combined together. In
this case the odometric model was given random
parameters bias that were drawn randomly according
to those of the control model except for an
augmented steering actuation error, as such is
expected to be in reality. The parameters used by
odometric model were drawn from the same normal
distributions which were supposed to be in the
previous simulations set (σ
b
= 0.002 m , σ
R
= 0.0005
m and σ
α
= 0.1 deg) while the control model is
affected by the same wheelbase bias and by a 1
degree constant actuation error. In this simulation
the residuals were eps_path = 0.064 m, eps_fin =
0.028 m. In Figure 15 the worst case in term of
maximum following residual.
0 0.005 0. 01 0. 015 0. 02 0. 025
0
1
2
3
4
5
6
7
x 10
4
Error [m]
Occ urency []
Following Error
Figure 13: Position residuals along each path and for each
trial path in the case of measurement noise influence.
0 0.002 0.004 0. 006 0.008 0.01 0.012
0
1
2
3
4
5
6
7
8
9
Residuals [m]
Occurrency
End-Poi nt Residuals Histogram
Figure 14: End-point residuals, one for each trial path.
PC-SLIDING FOR VEHICLES PATH PLANNING AND CONTROL - Design and Evaluation of Robustness to
Parameters Change and Measurement Uncertainty
17
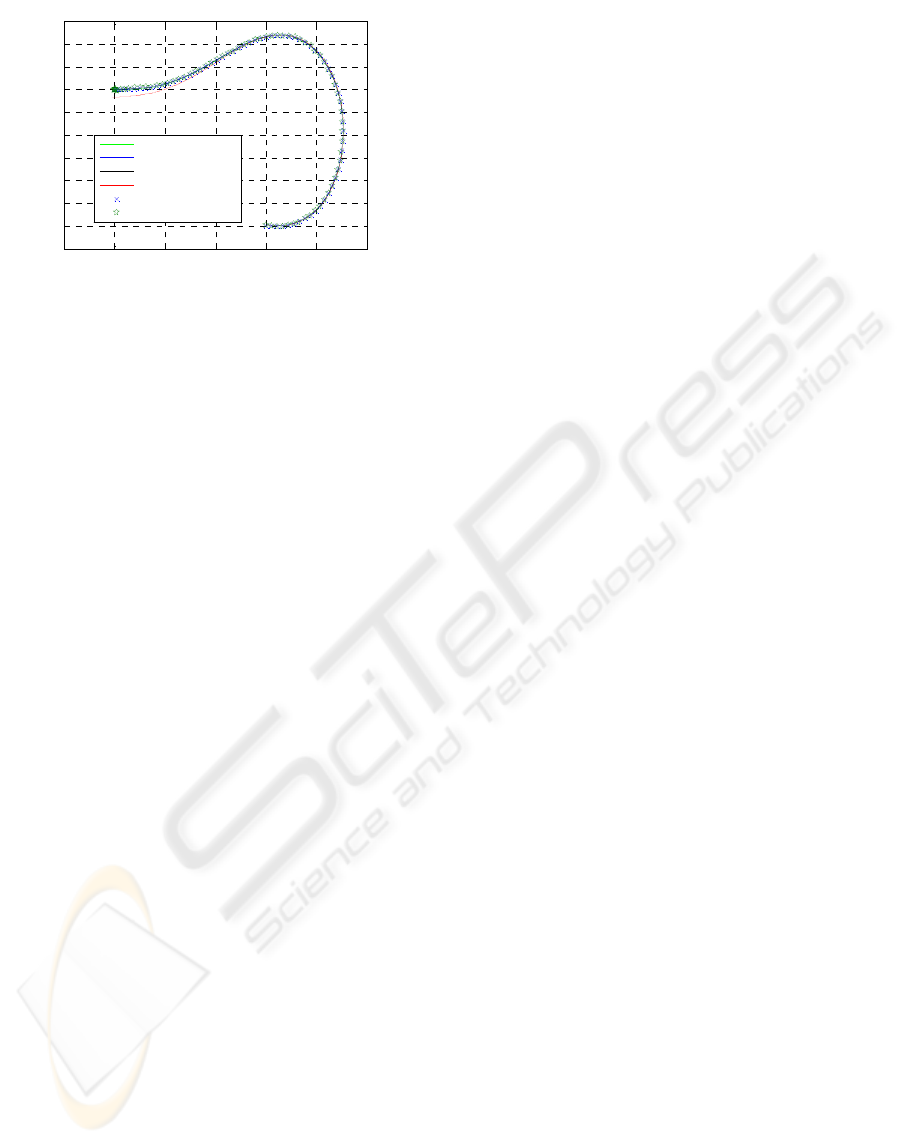
-8 -6 -4 -2 0 2 4
-0.5
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
Worst Case
x[ m]
y[m]
Planned Path
Simulated True Path
Fused Measure
Odometric Measure
Correct Measure
Laser Measure
Figure 15: Worst case in term of maximum following
residual in the combined influence factors simulations.
We would like to underline that in this
preliminary verification it was carried out a limited
number of iteration for the Monte Carlo analysis,
N = 100.
6 FUTURE WORK
Future work envisage an experimental verification
that will give an important verification of the
method effectiveness. Nevertheless simulation
results can be considered reliable from an in-
principle point of view (Baglivo 2005).
A second track of research foresee an increase of
the polynomial degree to achieve flexibility with
respect to obstacles constraints and minimum
curvature.
7 CONCLUSIONS
A novel technique for path planning and control of
non-holonomic vehicles is presented and its
performances verified. The performances of the
method that embody a planner, a controller and a
sensor fusion strategy was verified by Monte Carlo
simulation to assess its robustness to parameters
changes and measurement uncertainties.
The control algorithm showed high effectiveness
in path following also in presence of high
parameters deviations and measurement noise. The
overall performances are certainly compatible with
the operations of an autonomous transpallet for
industrial applications. Just to recall an example,
significant is the ability to compensate for a steering
error of 5° over a path of 180° attitude variation and
about 7 meters translation leading to a final
deviation of only 0.5 mm in simulation.
REFERENCES
Baglivo L., De Cecco M., Angrilli F., Tecchio F., Pivato
A., 2005 An integrated hardware/software platform
for both Simulation and Real-Time Autonomus Guided
Vehicles Navigation, ESM, Riga, Latvia, June 1st -
4th.
Biral F., Da Lio M., 2001 Modelling drivers with the
Optimal Manoeuvre method, ATA Congress, firenze
2001, 01A1029, 23-25 May.
De Cecco M., Baglivo L., Angrilli F., 2007 Real-Time
Uncertainty Estimation of Autonomous Guided
Vehicles Trajectory taking into account Correlated
and Uncorrelated Effects, IEEE Transactions on
Instrumentation and Measurement.
De Cecco M., Marcuzzi E., Baglivo L., Zaccariotto M.,
2007 Reactive Simulation for Real-Time Obstacle
Avoidance, Informatics in Control Automation and
Robotics III, Springer.
De Cecco M., 2003 Sensor fusion of inertial-odometric
navigation as a function of the actual manoeuvres of
autonomous guided vehicles, Measurement Science
and Technology, vol. 14, pp 643-653.
Dubins L. E., 1957 On Curves of Minimal Length with a
Constraint on Average Curvature and with Prescribed
Initial and Terminal Positions and Tangents,
American Journal of Mathematics, 79:497- 516.
Howard T., Kelly A., 2006 Continuous Control Primitive
Trajectory Generation and Optimal Motion Splines for
All-Wheel Steering Mobile Robots, IROS.
Kelly A., Nagy B., 2002. Reactive Nonholonomic
Trajectory Generation via Parametric Optimal
Control, International Journal of Robotics Research.
Labakhua L., Nunes U., Rodrigues R., Leite F. 2006.
Smooth Trajectory planning for fully automated
passengers vehicles, Third International Conference
on Informatics in Control, Automation and Robotics,
ICINCO.
Leao D., Pereira T., Lima P., Custodio L. 2002 Trajectory
planning using continuous curvature paths, DETUA
Journal, vol 3, n° 6.
Lucibello P., Oriolo G., 2001. Robust stabilization via
iterative state steering with an application to chained-
form systems, Automatica vol. 37, pp 71-79.
Nagy, M. and T. Vendel , 2000. Generating curves and
swept surfaces by blended circles. Computer Aided
Geometric Design, Vol. 17, 197-206.
Solea, R., Nunes U., 2006. Trajectory planning with
embedded velocity planner for fully-automated
passenger vehicles. IEEE 9th Intelligent
Transportation Systems Conference. Toronto, Canada.
Rodrigues, R., F. Leite, and S. Rosa, 2003. On the
generation of a trigonometric interpolating curve in
ℜ
3
, 11th Int. Conference on Advanced Robotics,
Coimbra, Portugal.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
18
