
Fuzzy Clustering Methods in Multispectral Satellite
Image Segmentation
Rauf Kh. Sadykhov
1
, Andrey V. Dorogush
1
and Leonid P. Podenok
2
1
Computer Systems Department, Belarusian State
University of Informatics and Radioelecrtronics
6 P. Brovka st, Minsk, Belarus
2
Laboratory of System Identification, United Institute of
Informatics Problems, National Academy of Sciences of Belarus
6 Surganov st, Minsk, Belarus
Abstract. Segmentation method for subject processing the multispectral satel-
lite images based on fuzzy clustering and preliminary non-linear filtering is rep-
resented. Three fuzzy clustering algorithms, namely Fuzzy C-means, Gustafson-
Kessel, and Gath-Geva have been utilized. The experimental results obtained us-
ing these algorithms with and without preliminary nonlinear filtering to segment
multispectral Landsat images have approved that segmentation based on fuzzy
clustering provides good-looking discrimination of different land cover types. Im-
plementations of Fuzzy C-means, Gustafson-Kessel, and Gath-Geva algorithms
have got linear computational complexity depending on initial cluster amount
and image size for single iteration step. They assume internal parallel imple-
mentation. The preliminary processing of source channels with nonlinear filter
provides more clear cluster discrimination and has as a consequence more clear
segment outlining.
1 Introduction
It is known that forests and wetland are the main factors preventing the decline in bio-
diversity on the Earth in aggressive conditions of human activity. The main problem is
agricultural expansion and deforestation. Deforestation is the consequence of two main
reasons – agricultural expansion and accidental events. But forestry and agriculture are
inseparable and condemned to work hand in hand. Significant part of forest is damaged
by fire, pests, irrational agricultural politics leading to change of ground water level
and as result leads to sickness and wreck. At now it is possible to discriminate forest
areas on early stage of damaging using multispectral images of high spatial resolution
received from satellites. That technology started about 40 years ago to monitor Earth
surface at now is the effective instrument of ecological and agricultural monitoring such
the regions as forests and wetland and preventing any accidents. Multispectral satellite
images are able to bring us information in both visible and invisible spectral bands about
vegetation, water temperature and land cover.
Kh. Sadykhov R., V. Dorogush A. and P. Podenok L. (2007).
Fuzzy Clustering Methods in Multispectral Satellite Image Segmentation.
In Proceedings of the 3rd International Workshop on Artificial Neural Networks and Intelligent Information Processing, pages 91-98
DOI: 10.5220/0001635200910098
Copyright
c
SciTePress

Multi-dimensional cluster analysis and segmentation are base procedures in the-
matic processing the multispectral images received from remote sensing satellites. There
are lot of clustering and segmentation methods which have different benefits and im-
perfections. The special class of such the methods is represented by fuzzy clustering
ones.
2 Method Description
Three clustering algorithms based on fuzzy methods where developed and utilized as
part of segmentation software. There are fuzzy c-means[1] (FCM) and its variants –
Gustafson-Kessel clustering algorithm [2, 3] and Gath-Geva one [4].
FCM is a method of data clustering which allows one data objects to be a member
of two or more clusters. This method developed by [5] and improved by [6] is based on
minimization of the following objective function:
J =
N
X
i=1
C
X
j=1
µ
m
ij
k x
i
− s
j
k, (1)
where m is real number ≥ 0, µ
ij
– degree of membership of x
i
in cluster s
j
, x
i
is
the multi-dimensional data object, s
j
is the multi-dimensional center of the cluster, and
k · k is any norm expressing the similarity between any measured data and the cluster
center.
Fuzzy clustering is carried out through an iterative optimization of the J
m
with the
update of membership matrix µ
ij
and the cluster centers s
j
using folowing algorithm:
1. The data set X = (x
j
) = (x
j1
, x
j2
. . . , x
jp
)
T
given. We choose the number of
clusters 1 < c < n, where p – dimension of data set.
2. Initialize the partition matrix µ
ij
using random number genetrator in range [0, 1]:
c
X
i=1
µ
ij
= 1, (2)
3. Calculate the cluster centers s
i
= (s
i1
, s
i2
, . . . , s
ip
)
T
(i = 1, 2, ..., c):
s
i
=
n
X
j=1
µ
2
ij
x
j
,
n
X
j=1
µ
2
ij
, (3)
4. Calculate the error:
E =
c
X
i=1
n
X
j=1
µ
2
ij
(s
i
− x
j
)
T
(s
i
− x
j
). (4)
If error is small enough, then stop iterations, else go to item 5.
92

5. Calculate the ”new“ partition matrix µ
ij
:
µ
ij
=
n
X
m=1
d
2
ij
/d
2
mj
!
−
1
2
(5)
and then go to step 3.
where d
2
mj
is similarity measure k · k.
Fuzzy c-means, Gustafson-Kessel, and Gath-Geva clustering algorithms are distin-
guished in the definition of distance function between the objects to be classified: Fuzzy
C-means:
d
2
ij
= (s
i
− x
j
)
T
(s
i
− x
j
), (6)
Simple euclidean distance provides hyper-spherical form of clusters.
Gustafson-Kessel:
d
2
ij
= (s
i
− x
j
)
T
(det(F
i
)
1
2
F
−1
i
)(s
i
− x
j
), (7)
Gath-Geva:
d
2
ij
=
det(F
i
)
1
2
α
i
exp(
1
2
(s
i
− x
j
)
T
(F
−1
i
)(s
i
− x
j
)), (8)
where F
i
is covariance matrix, that provides ellipsoidal form of clusters and more com-
prehensive partitioning the multi-dimensional data, α
i
is calculated in following man-
ner:
α
i
=
1
n
n
X
j=1
µ
ij
. (9)
Covariance matrix is used to form non-spherical clusters which are more suitable for
multi-dimensional data partitioning. That also leads to visible difference in algorithm
convergence, effectivity and performance of processing the multispectral images.
Distance function for Gustafson-Kessel and Gath-Geva algorithms uses covariance
matrix to take into account different metrics (scales) in different dimensions. The large
images to be processed might be the reason of weak covariance matrix conditional-
ity that results in heavy losses of aptitude for discrimination for Gustafson-Kessel and
overflows for Gath-Geva when fixed digit capacity arithmetics based on atomic numer-
ical types is used. To keep of that problems standard normalization methods and arbi-
trary (multi-precision) arithmetics are the sufficient efforts. When d
2
ij
becomes small
the overflow may occure. To prevent that case the distant function is confined from
below by some smallest value d
min
.
Due to source signal noise the some spatial segment granularity occurs. To reduce
that granularity the weak nonlinear filtering using algorithm [7] was applied to source
channels. That algorithm may be used both for edges extraction and for nonlinear filter-
ing. It does not lower the sharpness of transitions of channel brightness the boundaries
of cover types remain clear. As a result the boundaries of spatial segments after cluster-
ing process also remain legible. Algorithm works with values of brightness and pixels’
coordinates simultaneously. To form the homogeneous areas or search the edges on the
gray-scale image a round mask is used. Usually the mask’s radius is 3.4 pixels which
93

Fig.1. Channels 2-5 of multispectral Landsat image to be processed with fuzzy clustering algo-
rithm.
gives mask of 37 pixels size. The mask is placed at each point of the image and the
brightness of each pixel of the mask is compared with the brightness of the mask cen-
tral pixel.
c(r, r
0
) =
(
1, I(r) − I(r
0
) ≤ t
0, I(r) − I(r
0
) > t,
(10)
where I(r
0
) – the brightness value of the mask’s center, I(r) – the brightness value of
the mask pixel, t specific threshold.
The result of the comparisons is sum:
n(r
0
) =
X
r
c(r, r
0
). (11)
where n is the quantity of pixels in the USAN (Univalue Segment Assimilating Nu-
cleus). Then that sum should be minimized, so the algorithm is called SUSAN (Small-
est USAN). Parameter t means the maximum of ignored noise. Then n is compared
with it’s thresholding value g, which is 3n
max
/4, where n
max
– maximum value which
could be assigned to n.
3 Experimental Results
To test the fuzzy clustering algorithms the multispectral Landsat images have been used.
Fig. 1 shows channels 2-5 which were chosen for processing. Landsat channels shown
on fig.1 have different dispersion and were equalized using netpbm utilities to make
them visible more clearly. The channel data to be fed into clustering software remain
untouched because of clustering algorithm takes in to account real distribution of chan-
nel signal level on one’s own.
Raw output data of developed segmentation software is 2-d vector field over R
N
,
where N is a number of clusters. Each component of that field is strictly increasing
function of probability for pixel to be member of one of N clusters.
On presented images one can see some well discriminated land cover types. There
are open water, forests, wetlands, bushes and agriculture areas. Results of segmentation
on 15 clusters using fuzzy C-means without any preliminary filtering show that there
94

also are fuzzy boundaries of segments on the cluster map going on to sand in some
places. To diminish such the phenomena one can use filter which will smooth slightly
changing areas rather blur clearly discriminated land cover type edges. Most appropri-
ate filter having got such the behavior is the non-linear one described in [7]. The fig. 2
demonstrates smoothing properties of that filter when brightness threshold was choosed
be equal to 7, 15, and 20. Besides the brightness threshold parameter the filter has spa-
tial one – distance threshold which was set into default value corresponding to radius
equal to about 3.4 and was not changed across experiments. As one can see, smooth-
(a) (b) (c) (d)
Fig.2. Nonlinear filtering samples: (a) original image, (b) brightness threshold = 7, (c) bright-
ness threshold = 15, (d) brightness threshold = 20.
ing property of that filter increases with brightness threshold grows. At the same time
some part of edges remains sharp. Amount of sharp edges and consequently cluster
granularity depend on brightness threshold. Thus we get additional degree of freedom
in segmentation process control that could dramatically improve the segmentation re-
sults. Nonlinear filtering lowers intraclass covariance but practically doesn’t touches
interclass ones, so cluster discrimination doesn’t suffer. Smoothing the channels before
segmentation allows to eliminate fine granularity of output segment map and to merge
the small cluster with large ones. In reality this means disappearance of some real small
objects, for example, bushes in wetland areas. Nevertheless, sometimes it is necessary
to get generalized segment map. The SUSAN filter allows to fulfil nonlinear processing
variyng the threshold in wide region achieveing the smoothing results from neglible
small up to very strong.
Fig. 3-6 demonstrate examples of segmentation using non-linear filtering with dif-
ferent brightness threshold for Gustafson-Kessel and Gath-Geva clustering algorithms.
The cluster number was choosen taking into account real diversity of land covers for
territory being ivestigated. Actually a lot of experiments with different cluster number
were fulfiled. As soon as segmentation become to look stable cluster number was stated.
Obtained results have transformed into scalar field using simple maximal probabil-
ity solver to get the possibility of visual evaluation and have presented as colour map
of spatial partitions. As a result every pixel became a member of one cluster. All pixels
of same colour are members of same cluster. No any intelligent algorithm was used to
colourize segment map so the same areas on different pictures have different colours.
As one can see the growth of the threshold leads to raising the segment area when
target number of clusters is fixed. However it should be pointed that general structure
of segment arrangement and its structure in relation with land cover types is not signif-
icantly changed.
95
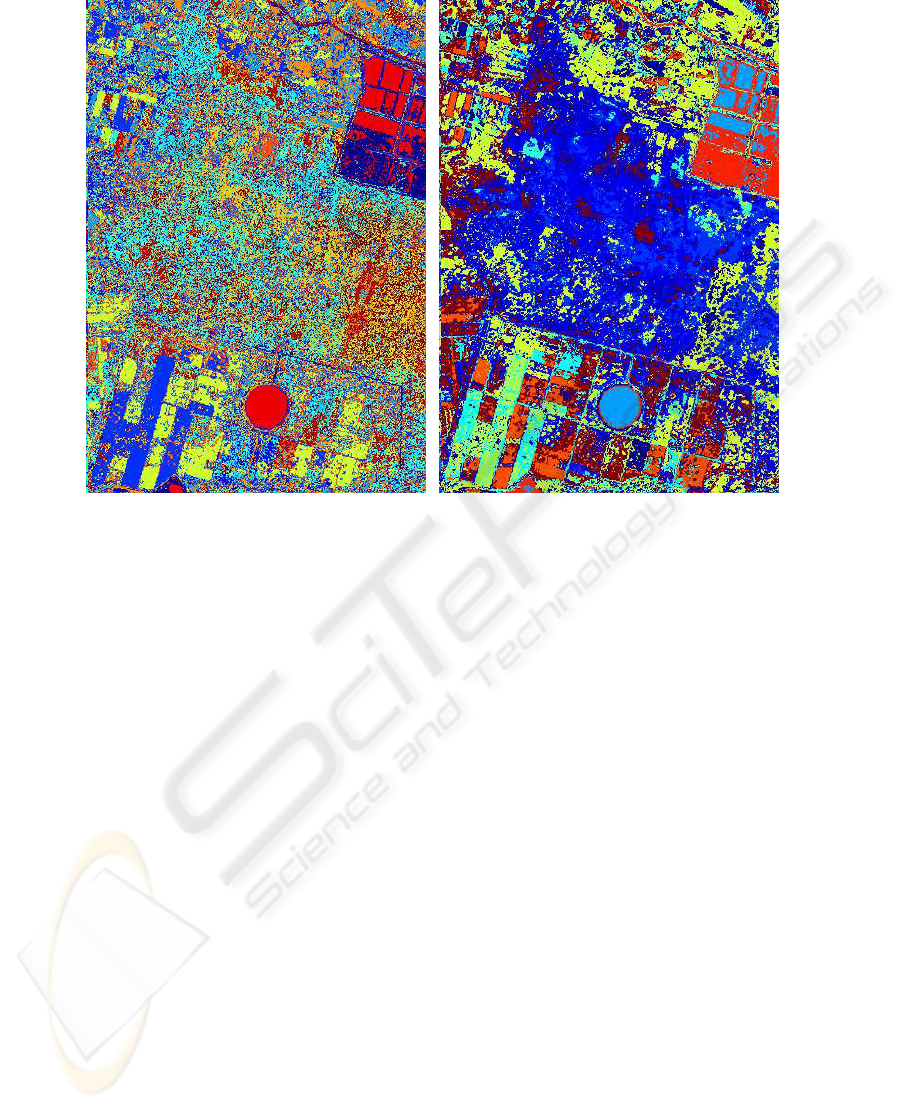
(a) (b)
Fig.3. Segmentation results using Gustafson-Kessel (a) and Gath-Geva (b) algorithms at 20 clus-
ters without any filtering.
4 Conclusion
Segmentation results of multispectral Landsat images obtained using fuzzy clustering
methods such as Fuzzy C-means, Gustafson-Kessel, and Gath-Geva with and without
preliminary nonlinear filtering testify that segmentation using fuzzy clustering meth-
ods provides good-looking discrimination of land cover types that occurs in uch the
complex cases as wetland, water-meadow, and bush areas. The discrimination quality
of segmented images was tested and approoved by land-improvement specialists using
data of land-based expedition. The non-linear filtering with guided smoothing is the
convenient instrument of preliminary processing for semi-automatic segmentation of
complex land covers.
Implementations of Fuzzy C-means and Gustafson-Kessel algorithms have got lin-
ear computational complexity depending on innitial cluster amount and image size for
single iteration step. All the algorithms assume internal parallel implementation for
MPP computer. The preliminary processing of source channels with nonlinear filter
provides more clear cluster discrimination and has as a consequence more clear seg-
ment outlining and provides operated generalization of output segment maps.
Really, segmentation software returns the results as 2-d vector field v
i
, which is the
strictly increasing function of probability p
i
that pixel is a member of i-th cluster. When
using more complex tool then simple maximal probability solver, for example, maximal
96
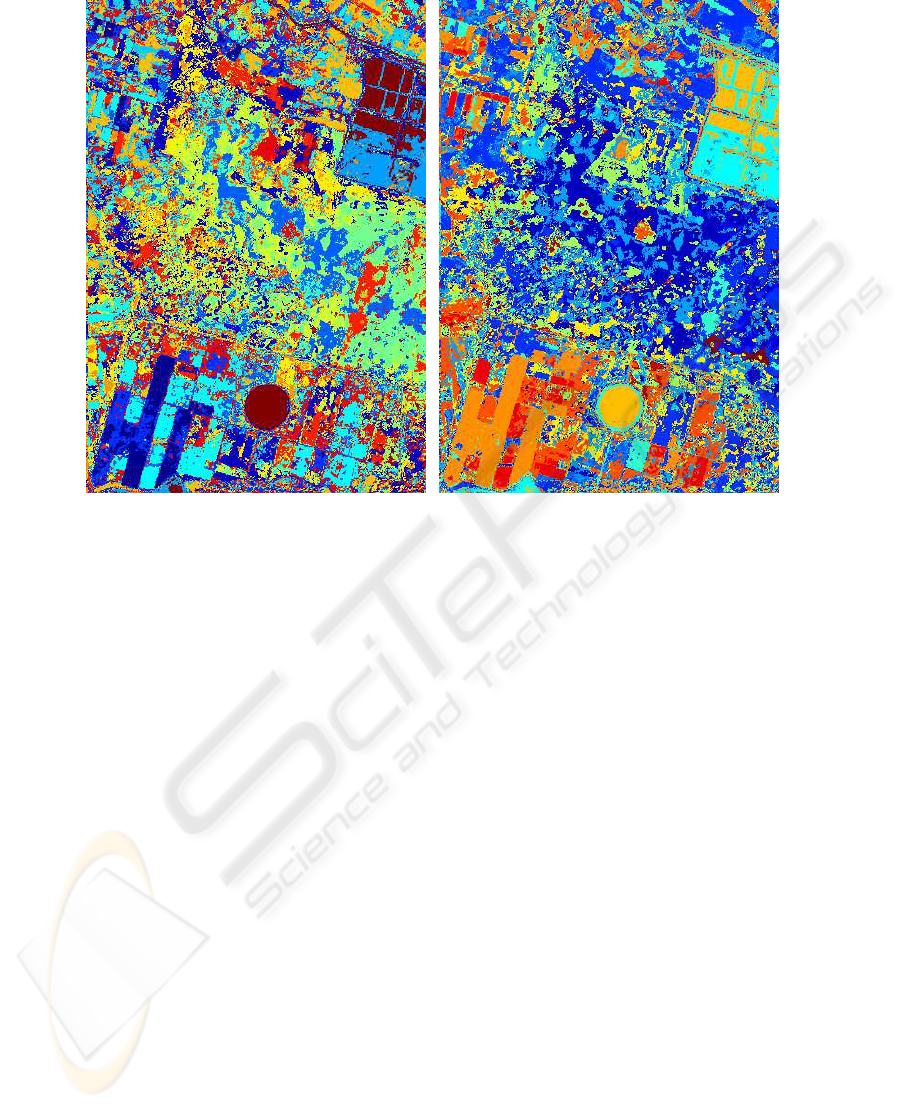
(a) (b)
Fig.4. Segmentation results using Gustafson-Kessel (a) and Gath-Geva (b) algorithms at 20 clus-
ters using filtering with threshold = 7.
likehood one, it is possible to significantly improve the results of segmentation and to
avoid large part of manual processing the multispectral data.
References
1. Hoppner, F., Klawonn F., Kruse, R., Runkler, T.: Fuzzy Cluster Analysis. Wiley, Chichester
(1999).
2. Gustafson, D. E., Kessel, W. C.: Fuzzy clustering with fuzzy covariance matrix. In Proceed-
ings of the IEEE CDC, INSTICC Press, San Diego (1979) 761–766
3. Babuska, R., van der Veen, P. J., Kaymak, U.: Improved covariance estimation for Gustafson-
Kessel clustering. IEEE International Conference on Fuzzy Systems (2002) 1081–1085”
4. Gath, I., Geva, A. B.: Unsupervised optimal fuzzy clustering. IEEE Transactions on Pattern
Analysis and Machine Intelligence (1989) 7:773–781
5. Dunn, J. C.: A Fuzzy Relative of the ISODATA Process and Its Use in Detecting Compact
Well-Separated Clusters. Journal of Cybernetics (1973) 3: 32-57
6. Bezdek, J. C.: Pattern Recognition with Fuzzy Objective Function Algoritms. Plenum Press,
New York (1981)
7. Smith, S. M., Brady, J. M.: SUSAN – a new approach to low level image processing. Interna-
tional Journal of Computer Vision May (1997) 23(1):45-78
97
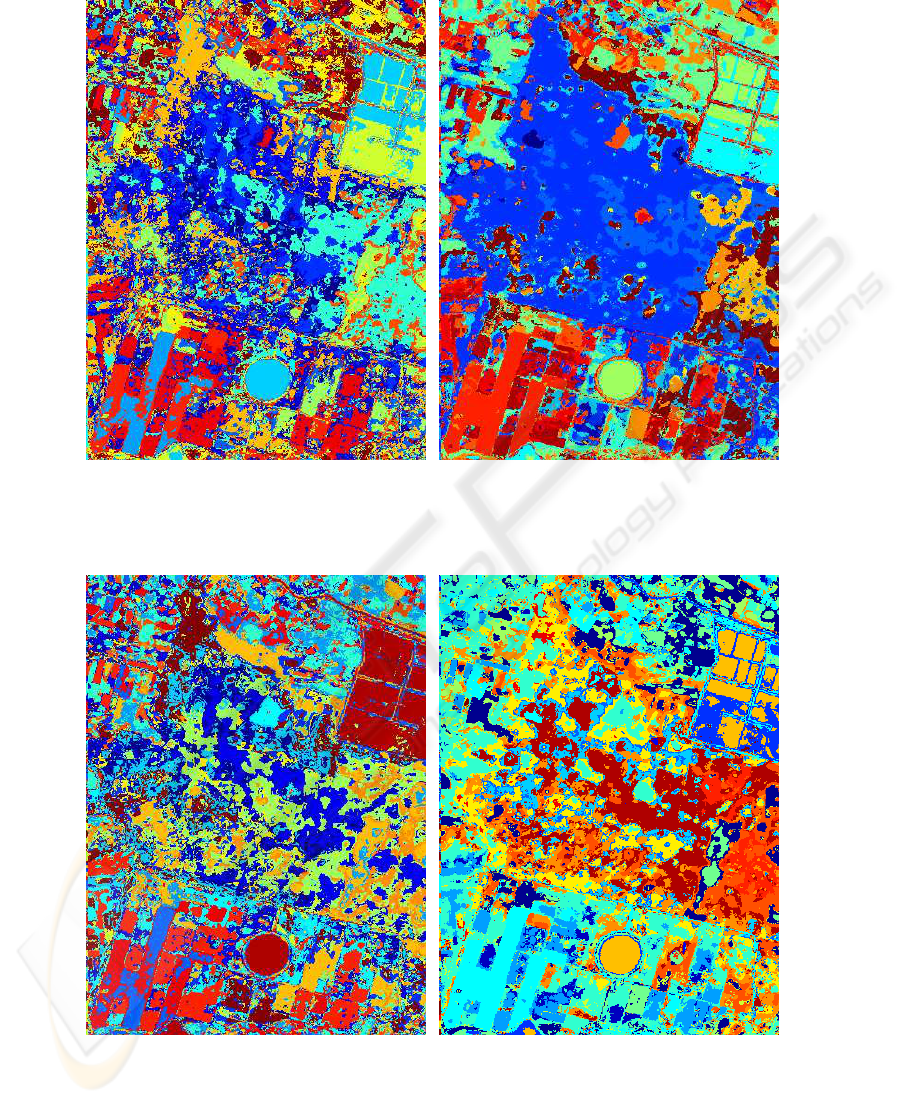
(a) (b)
Fig.5. Segmentation results using Gustafson-Kessel (a) and Gath-Geva (b) algorithms at 20 clus-
ters using filtering with threshold = 15.
(a) (b)
Fig.6. Segmentation results using Gustafson-Kessel (a) and Gath-Geva (b) algorithms at 20 clus-
ters using filtering with threshold = 20.
98
