
Multi-Robot Task Allocation with Tightly Coordinated
Tasks and Deadlines using Market-Based Methods
Robert Gaimari, Guido Zarrella and Bradley Goodman
The MITRE Corporation, 202 Burlington Road, Bedford MA 01730, USA
Abstract. The domain of Collaborative Time Sensitive Targeting requires
agents to assess and prioritize tasks, dynamically form heterogeneous teams of
agents to perform the tightly coordinated tasks, and to complete them within
time deadlines. In this paper, we describe extensions to market-based, multi-
robot task allocation to allow for these requirements.
1 Introduction
The motivation for the research described in this paper is to extend the state of the art
in market-based multi-robot planning algorithms to handle the challenges presented
by real world domains with tightly-coordinated and time-constrained tasks. Past
research into market-based robot coordination algorithms [2, 3, 11] has been
motivated by an attempt to design an algorithm to reason in an efficient fashion about
resource utilization and task allocation while preserving the ability to quickly and
robustly respond to a dynamic environment.
Prior work has demonstrated the effectiveness of the TraderBots algorithms [2, 3]
in several domains. It has been used in domains with tightly coordinated tasks
requiring heterogeneous, dynamically formed teams [7]. It has also been used in
domains requiring homogeneous teams to perform tasks with time deadlines [8].
There are other real world applications that bring together elements from both of these
areas. The Collaborative Time Sensitive Targeting (TST) problem, for instance, is a
domain in which agents must assess and prioritize multiple tasks, form heterogeneous
teams dynamically, and perform tightly-coordinated tasks with tight deadlines. Search
and rescue is one real-world example of a TST problem. Multiple rescue workers,
each having different skills, must work together to save the maximum number of
victims within a limited time period. New information will be discovered during the
rescue, forcing the workers to reassess and reprioritize.
The TST domain requires tightly-coupled coordination between agents, as agents
with complementary capabilities are required to form sub-teams in order to
successfully perform a task. The TST domain also requires agents to reason about
tasks with time deadlines.
Section 2 of this paper explains our task domain, a type of TST problem. Section 3
describes the standard approach of market-based, multi-robot task allocation, as
Gaimari R., Zarrella G. and Goodman B. (2007).
Multi-Robot Task Allocation with Tightly Coordinated Tasks and Deadlines using Market-Based Methods.
In Proceedings of the 3rd International Workshop on Multi-Agent Robotic Systems, pages 54-63
Copyright
c
SciTePress

presented in [2]. Section 4 describes our implementation in detail, along with our
extensions to the standard approach. And in Section 5, we show our results.
2 Task Domain
Our task domain is a variant of the TST problem. In our scenario, autonomous robots
perform a Search and Rescue mission by locating and treating sick sea animals. Over
the course of an exercise (90 “minutes” long, sped up in the simulation), messages
come in from outside the system with reports of the general locations where sick
animals might be found. These animals move over time. The message will list the
name of the animal (e.g. “Sick Manatee”), the approximate latitude-longitude location
(either a single point, or an area of ocean), a deadline which the task has to be
completed by (e.g. cure the manatee within 30 minutes or it will die), and the
maximum reward offered for completing the task. If a task is completed before the
deadline, the robots receive the full reward; if the deadline passes, they receive no
reward, even if they complete the task. The robots already have an incentive to finish
tasks as quickly as possible; the faster they complete one task, the faster they can
begin a new one. If we wanted to make finishing as quickly as possible even more
important, we might allow the maximum reward to drop as the deadline approached,
gradually falling to zero.
In this domain, all tasks are of equal priority; therefore, the maximum rewards are the
same for all tasks. If we wanted to indicate that some tasks have higher priority than
others, we could set some rewards higher than others, making them more valuable to
perform.
We have a heterogeneous set of robots available to perform these jobs. They are in
three main groups:
1. Radar Sensors – Planes and boats with radar and sonar sensing capabilities. They
are very fast and have large sensing range; so they can get to the location quickly
and easily pinpoint where the animal is located. However, since they are sensing
electronically, they cannot diagnose the illness.
2. Video Sensors – Planes, boats, and helicopters with video sensing capabilities.
Because they have video, they are able to diagnose the disease the animal has and
report it to the rest of the team. However, they are very slow and have limited
sensing range.
3. Rescue Workers – Boats or submarines capable of capturing or curing animals in
distress. They are generally about as fast as radar sensors. However, they have no
sensors of their own; they must rely on reports from the sensor robots for
navigation data. Also, they can act only with the proper diagnosis from a video
sensor.
The robots within each group vary in their specific characteristics, such as speed and
sensing range. Also, there are three separate areas of ocean to be searched; the set of
55

robots on each map is confined to that area. Initially, some robots are stationary near
their home base and will remain there until they receive a task; others have initial
paths that they follow once the clock begins, whether they have a task or not.
To complete a task, there must be a minimum of two robots: a video sensor to find the
animal and make the diagnosis, and a rescue worker to administer the treatment. A
radar sensor is not required, but because of its speed and sensor range, it can reduce
the cost of finding the animal.
3 Market-Based Task Allocation
In a market-based system, such as the one described in [2], the problem space is
modeled as an economy. The currency may be simply an abstract measure, or it may
represent something concrete, such as time, fuel, resources, etc. It represents the value
of performing tasks and achieving goals.
There are a set of tasks which need to be performed. These tasks will generally take
one or a group of agents to complete. Each task is a source of revenue for the agents;
each has a monetary reward associated with it, which is given to the agent(s) that
successfully complete the task. These rewards vary according to a number of
measures, such as relative priority, difficulty, risk, etc.; they are set at the beginning
of the exercise, generally by the human assigning the tasks. Performing a task also
costs an agent a certain amount of money, as resources must be consumed to complete
them.
The players in this economy are the robots. They may be physical or virtual,
depending upon the jobs they must do. In a homogenous group, all of the robots have
the same capabilities and any job may be done by any robot. More complex systems
may be made up of heterogeneous groups. In these systems, jobs may require several
robots working together as a team to complete the mission. Individual agents are
“self-interested”; that is, each agent works to earn as much profit as possibly by
minimizing its own costs and maximizing its own revenue. The goal of the system as
a whole is to minimize the cost of resources consumed by the team while maximizing
the value of the tasks completed. Free market economic theory holds that a collection
of self-interested agents will self-organize through spontaneous cooperation and
competition to create an emergent, globally efficient behavior. Market-based planning
algorithms seek to mimic this behavior with a simulated economy.
Tasks are distributed through auction. As each task is introduced to the system, it is
given to a special type agent called an “OpTrader”. An OpTrader sends out an
announcement to all of the participating robots describing the task and the maximum
reward available for performing the task. This is the call for bids. Each robot
interested in placing a bid for the job does three things:
1. Calculate the estimated cost for performing the task. In a domain where there is no
ambiguity, the robot may be able to determine exactly how much performing the
task will cost. But in most realistic systems, there will be hidden information that
56

will not be revealed until the task is already under way. For example, there may be
unknown obstacles between the robot’s current location and the destination; or the
destination may only be partially defined.
2. Calculate the desired profit. The profit must be high enough to make it worth the
robot’s time to perform the task. The robot must decide how much payment it will
require to make the task worthwhile. A common method for calculating a profit
margin is to use a set percentage of the costs or available revenue.
3. Calculate the bid. This is generally the cost plus the profit margin. If this bid
amount is lower than the maximum reward available, then send it to the auctioneer.
The OpTrader will gather all of the bids and award the ownership of the task to the
robot with the lowest bid. The difference between the maximum reward and the
lowest bid is kept by the OpTrader as its profit.
Once the initial round of bids is completed, and all tasks have been awarded, each
robot that owns a task may decide to put it up for another round of auction. Now that
each robot has a plan of where it will be going and what it will be doing, it can have a
better idea of its costs for performing other tasks. If it has already committed to
performing a task in a certain location, then it might be relatively inexpensive to also
perform another task in the same area. Inter-robot trading (reauctioning) allows the
tasks to be redistributed to the robots that can perform that at lower costs. To
complete such a deal both robots must be happy with the exchange – the buyer robot
has a new task at low cost, and the seller robot has a nice profit (the difference
between the maximum reward it announced and the buyer’s bid) for no extra work.
This inter-robot trading will continue until there are no more mutually profitable deals
to be made, at which time the robots will begin performing their tasks. As they move
and explore the environment on their paths, they will be gathering additional
information on the environment. As new and more accurate data becomes available,
the robots may periodically put some of the tasks on their agendas up for reauctioning
again; others may have discovered things that would allow them to more accurately
estimate cost and buy the tasks from the seller.
When a robot completes a task, it sends a message to the agent it bought the task
from, requesting payment. That agent will send a message up the chain to the next
level where it got the task from, and so on. Once it reaches the top (the OpTrader),
payments will work their way back down the chain, until each robot along the way
has been paid what it was promised.
Auction-based task assignment and multi-robot coordination allows the system to
approach an approximation of the optimal solution of minimal cost and maximal
reward while keeping communication costs relatively low, avoiding single points of
failure, and robustly handling robot failure and communication difficulties.
57

4 Implementation and Extensions
We developed our simulation and agent environment entirely in Java using the JADE
agent framework [1]. Task allocation through auction was handled using inter-agent
communication. The market-based task allocation is performed using the methods
described in Section 3, with our extensions.
4.1 Agents
The primary type of agent in our system is the TraderAgent. Each TraderAgent is
associated with a single robot in the simulation environment. When they are first
initialized, TraderAgents have a back and forth communication with their assigned
robots to learn their capabilities (what type of robots they are, their speeds, sensing or
rescue ranges, and so on) and current status (their current locations, their remaining
fuel, and, in the case of sensors, lists of objects detected and their locations). Each
clock tick of the environment thereafter, each robot will send its agent the latest status
report. If the TraderAgent wants its robot to move to a new location, it sends a
message directing it on the new path.
A TraderAgent’s primary job, as the name implies, is to trade tasks. When a new task
is announced, an agent may attempt to buy it through auction. This process is
described in Section 4.2. An agent which owns a task may put it up for auction, either
to off-load the task to a new robot, or in team building. These re-auctioning methods
are described in Section 4.3.
When tasks are introduced to the system, they are initially given to the special
OpTrader agent. This agent differs from a standard TraderAgent only in that it does
not have a robot associated with it. The OpTrader immediately puts tasks given to it
up for auction, with a maximum offered reward that is part of the task description.
When the task is completed, it is responsible for sending the payment for the job to
the original purchasing agent. Because it is not associated with a robot, it cannot be a
member of a team. In a system where robustness is essential, there could easily be
multiple copies of these agents, either ready to take over in the event of a problem or
performing their jobs in parallel with their counterparts; however, in our system, one
of each is sufficient.
4.2 Bidding on Auctions
When a TraderAgent receives an auction announcement, it follows the three steps
described Section 3, on standard auction-based systems.
1. The agent calculates its estimated cost for performing the task. In our system, cost
is based upon the time spent performing the task. The locations given in the
auction message are general locations, not specific; once sensors arrive there, there
may need to be some exploration before finding the actual animal. Also, this cost
58

may be affected by other locations that the agent already intends to visit. If the new
area is nearby somewhere the agent is already headed, the estimated cost for the
new task would be lower.
2. It calculates the desired profit. The TraderAgent calculates, as its base profit, a
percentage of the difference between the maximum reward offered and its
estimated cost. In addition, an opportunity cost for accepting the task is calculated.
This represents the likelihood that the agent will be able to purchase other tasks at
a future date. The agents know the locations and capabilities of other nearby robots
with similar capabilities, since this information is periodically broadcast locally.
The agent selects a number of random locations on the map and simulates how
many of these locations it would be likely to win in a hypothetical auction. This
represents opportunity cost. An agent with a high OC can safely lose out on the
current auction without fearing for its own economic well-being. Therefore, a high
OC agent is able to request a higher profit margin. Meanwhile agents in less
desirable circumstances are willing to lower their profit margin in an attempt to
win the current auction. This means that the lowest cost agent may not always win
an auction, particularly in cases where the overall team can benefit by saving a
high OC agent for future tasks. We apply this opportunity cost function to help
prevent over-committal of scarce resources.
3. The TraderAgent decides whether or not to place the bid, based upon cost plus
desired profit. If this value is less than the maximum reward, then it places the bid.
If the value is higher than the maximum reward, or if the TraderAgent realizes it
cannot complete the task in the required amount of time (causing the task to be
finished after the task deadline), it will decide not to place a bid and it sends a “no
thanks” message to opt out of the auction.
4.3 Re-Auctioning Tasks
There are two situations in which an agent will attempt to re-auction a task it owns
but has not yet completed. The first is in the team building stage. This step is critical
to robots performing tightly coupled tasks. After a robot wins a task at auction, it is
sent a list of other robots that already have ownership of the task. These robots make
up the team that will eventually perform the task. If the team is not yet complete, for
instance if no rescue worker has joined the team, the robot will place this task on the
auction block with a caveat that it is only accepting bids from a certain type of buyer.
At the conclusion of the auction, the winning bidder is assigned ownership of the task,
but the seller retains ownership as well, and all members of the team update their
team lists.
Robots will also periodically attempt to place tasks they own up onto the auction
block for the purposes of offloading the task onto another robot. In this case the task
can only be sold to a robot with the same capabilities as the seller. If there are no bids
the seller retains ownership of the task. On the other hand, if new information has
arrived and cost estimates have been updated, a different robot may choose to buy the
task. This will occur only when the new robot is willing to charge less to perform the
59

task than the seller’s expected costs, allowing both robots to earn a profit. In this case,
the winning bidder replaces the seller on the original team list, and the seller is freed
of its obligation.
4.4 Collecting Payment for Completed Tasks
As described earlier, the tasks in this system must be performed by a team of robots
including at least one video sensor and rescue worker. This team can also optionally
include a radar sensor. The rescue worker is the robot that actually finishes the task,
which it accomplishes by administering medicine curing the animal. Once the rescue
worker has done this, its TraderAgent reports the fact to its teammates. Each
teammate then requests payment from the agent that it purchased the task from.
Our system varies in this regard, however, from the standard auction-based algorithm.
In our task the teams are made up of robots that perform their jobs at greatly different
speeds. Even though the estimated cost for a radar sensor may be very low, the actual
cost is greatly increased by having to wait around while the slow video sensor travels
to the location and does its own part of the job. Since the agents associated with fast
robots generally win the tasks before the slower ones, there is no way to know ahead
of time what the additional costs might be.
There are a number of ways that this inefficiency could be dealt with. For example,
we could include information about slower robots in the cost estimation functions of
each TraderAgent. Another option would be to have the agents, once a team is
completed, share their cost estimates and allow the faster ones to recalculate. We
chose a method that requires a lower amount of inter-robot communication, in which
agents incur penalties on the agents below them in the chain.
The request for payment is the same. Each agent requests the amount of money it bid
for the task from the agent it bought the task from. However, as the payments are
distributed down the chain, each agent compares the actual cost to the estimated cost
it had initially planned upon. The difference between these is deducted from the
amount paid to the next agent. This agent adds, as a penalty to the next agent down,
the difference in its actual cost and the cost estimate, plus the amount it was penalized
by its seller. This penalty will move down the chain, until it finally winds up where it
belongs, on the slowest member of the team. These payments reflect the amount of
money the original agents would have bid if they had known the true cost based upon
the slowest robot. See an example in Figure 1. This example assumes that there was
no inter-robot trading or adding and removing of team members, but the details would
be essentially the same even with other agents in the chain. Future versions of the
algorithm may be able to use these penalties to learn the hidden costs of working with
certain other robots.
60
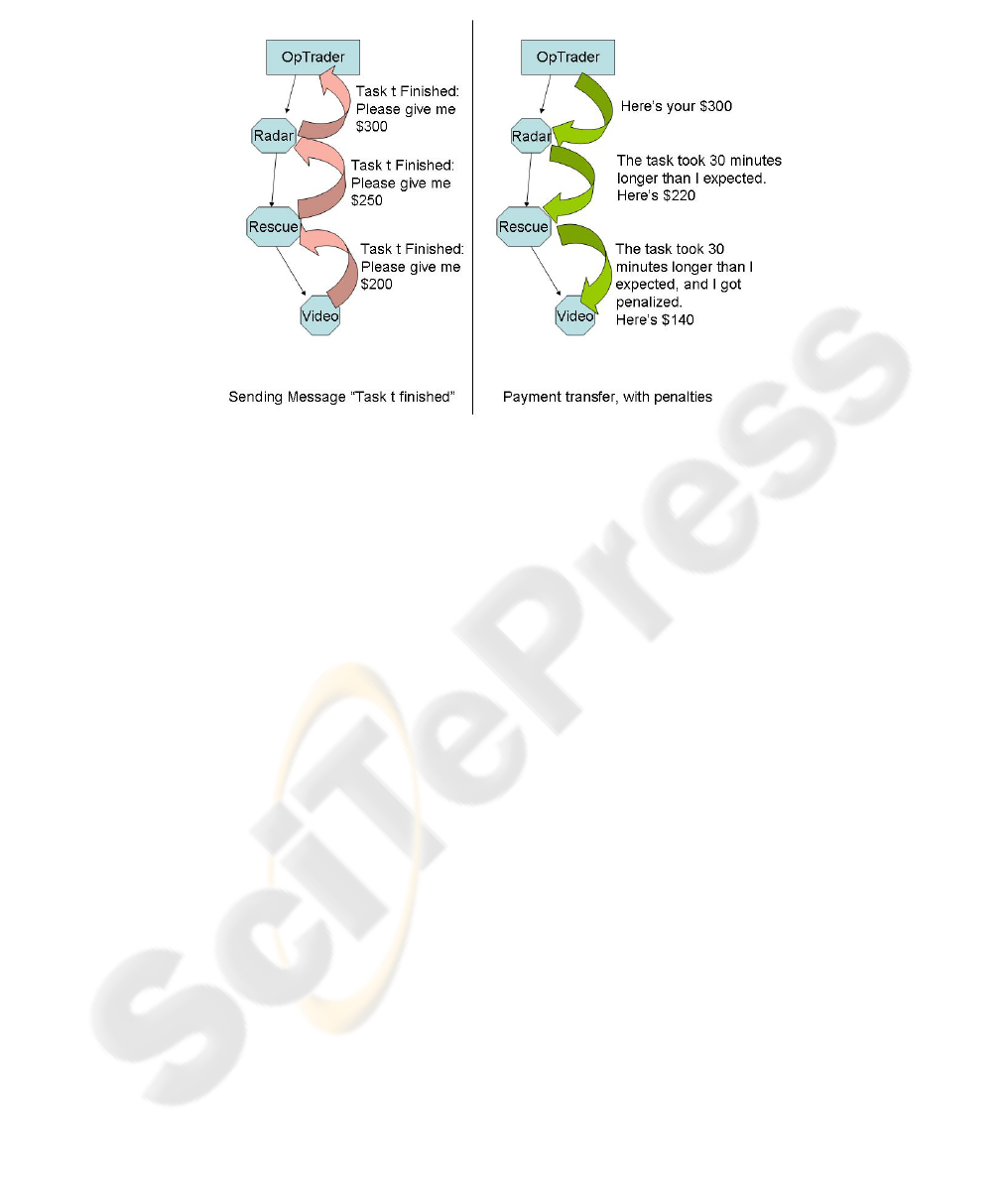
Fig. 1. Task Completion.
5 Results
The TST domain provides an ideal testbed for the market-based task allocation
algorithm, since completion of each TST task requires effective communication and
task assignment strategies. Furthermore the TST problem provides clear metrics for
evaluating group performance, as we can measure both the percentage of tasks
completed and the time needed to complete each task. We use this domain to
demonstrate our hypothesis that as the self-interested agents earn money in the virtual
economy, they also contribute toward the team goals and overall group performance,
even when performing tightly coupled tasks under pressure of time deadlines.
We built a test problem for our robot planning algorithm by performing a direct
translation of tasks used in a set of human experiments we performed into our own
modified aquatic TST domain. The translation was completely isomorphic, meaning
that the speeds, positions, and other attributes of all elements of the environment were
identical. Only the labels and images were changed for the purposes of the demo. The
robots planned and executed their own actions for 90 simulated minutes while
following the rules of the team-based economic system outlined above. A total of six
tasks were fed electronically at timed intervals into the robot auction environment.
The results of the robot and human teams are displayed in Table 1. The results show
that the robots were able to demonstrate effective team building and task assignment
strategies. The team of robots completed five of the six tasks with plenty of time to
spare before the task deadlines.
61
Table 1. Time (hh:mm:ss) to complete each task, comparing market-based robot task allocation
algorithm and human team performance.
Task:
Manatee
Killer
Whale
Blue
Whale
Dolphin
Sea
Turtle
Toxic
Leak
Robot
Completion
Time
0:42:00 0:40:00 1:22:00 1:09:00 1:07:00 N/A
Avg
Human
Team
Completion
Time
0:56:12 0:59:39 1:21:24 N/A 1:20:36 N/A
The robot team results also compare very favorably to the human teams’ results. The
robots completed five of six tasks, while no human team completed more than four.
The agents were able to complete the Dolphin task, which none of the ten human
teams had successfully prosecuted. The robots were also significantly faster than the
best human teams in three of the four tasks that were solved by both humans and
robots. The simulated agents did fail to complete one task, but none of the human
teams were able to successfully complete that task either. For more details on the
human version of the experiment, and comparing human/robot results, see our paper
submitted to the main conference.
6 Conclusion
We have shown that market-based multi-robot task planning can be successfully
extended into domains requiring tightly-coordinated actions to solve tasks with time
deadlines. In the case of our simplified TST domain, teams of autonomous robots
were able to provide significant gains over the performance of teams of humans.
We are not suggesting removing humans from the loop of the TST process. In real
world TST of any kind, there are many decisions that cannot possibly be made
without humans. Instead, our hope is that lessons learned from this research that can
be applied to real world problems.
Acknowledgements
The MITRE Technology Program supported the research described here. We are also
grateful for the assistance of Brian C. Williams and Lars Blackmore at the
Massachusetts Institute of Technology
62

References
1. Bellifemine F., Poggi A., Rimassa G. (2001). Developing multi-agent systems with a FIPA-
compliant agent framework. Software-Practice and Experience, 31, 103–128.
2. Dias M.B. (2004). TraderBots: A New Paradigm for Robust and Efficient Multirobot
Coordination in Dynamic Environments. Doctoral dissertation, Robotics Institute, Carnegie
Mellon University.
3. Dias M.B., Zlot R.M., Zinck M.B., Gonzalez J.P., Stentz A. (2004). A Versatile
Implementation of the TraderBots Approach for Multirobot Coordination. Retrieved from
www.ri.cmu.edu/pubs/pub_7477.html
4. Gerkey B., Mataric M. (2004). Multi-robot Task Allocation: Analyzing the Complexity and
Optimality of Key Architectures. International Journal of Robotics Research, 23 (9).
5. Goodman B., Linton F., Gaimari R., Hitzeman J., Ross H., Zarrella G. (2005). Using
Dialogue Features to Predict Trouble During Collaborative Learning. User Modeling and
User-Adapted Interaction, 15 (1-2), 85-134.
6. Grunwald T., Clark D., Fisher S. S., McLaughlin M., Narayanan S., Piepol D. (2004).
Using Cognitive Task Analysis to Facilitate Collaboration in Development of Simulator to
Accelerate Surgical Training. Studies in Health Technology and Informatics, 98, 114-120.
7. Jones E., Browning B., Dias M. B., Argall B., Veloso M., Stentz A. (2006, May).
Dynamically Formed Heterogeneous Robot Teams Performing Tightly-Coordinated Tasks.
Proceedings of International Conference on Robotics and Automation.
8. Jones E., Dias M. B., Stentz A. (2006, October). Learning-enhanced Market-based Task
Allocation for Disaster Response. Tech report CMU-RI-TR-06-48, Robotics Institute,
Carnegie Mellon University.
9. Lagoudakis M., Markakis E., Kempe D., Keskinocak P., Kleywegt A., Koenig S., Tovey
C., Meyerson A., and Jain S. (2005). Auction-based multi-robot routing. Robotics: Science
and Systems. Retrieved from http://www.roboticsproceedings.org/rss01/p45.pdf
10. Schneider J., Apfelbaum D., Bagnell D., Simmons R. (2005). Learning Opportunity Costs
in Multi-Robot Market Based Planners. IEEE Conference on Robotics and Automation.
11. Walsh W., Wellman M., Wurman P., MacKie-Mason J. (1998). Some Economics of
Market-Based Distributed Scheduling. International Conference on Distributed Computing
Systems. 612-618.
63
