
SUPERVISORY CONTROL OF HEAP MODELS USING
SYNCHRONOUS COMPOSITION
Jan Komenda
Mathematical Institute, Czech Academy of Sciences, Brno Branch Zizkova 22, 616 62 Brno, Czech Republic
Jean-Louis Boimond and Sébasten Lahaye
LISA Angers, 62, Avenue Notre Dame du Lac, 49000 Angers, France
Keywords:
Heap models, synchronous product, supervisory control, dioid algebra.
Abstract:
Heaps models are powerful models for concurrent timed discrete event systems. They admit linear description
using dioid algebras. Inspired by supervisory control of logical discrete event systems we introduce parallel
composition of heap models, called synchronous product, to formally describe the action of supervisor (rep-
resented by another heap model) on the system. This additional explicit concurrency for naturally concurrent
heap models is useful for studying supervisory control in the algebraic framework of dioid algebras. Timing
aspects of supervisory control, i.e. optimal timing of the controller, is studied based on residuation theory.
1 INTRODUCTION
There are two major streams in control theory of
Discrete Event (dynamical) Systems (DES). The first
stream, known as supervisory control theory, has
been introduced by Wonham and Ramadge for logi-
cal automata (e.g. (Ramadge and Wonham, 1989)).
The second stream more particularly deals with the
class of timed Petri nets, called timed event graphs,
based on linear representation in the (max,+) alge-
bra. Being inspired by papers on (max,+) automata
(e.g. (Gaubert and Mairesse, 1999), (Gaubert, 1995)),
which generalize both logical automata and (max,+)-
linear systems, it is interesting to develop a control
method for (max,+) automata by considering super-
visory control approach. However the time seman-
tics of the parallel composition operation (called su-
pervised product) we have proposed for control of
(max,+) automata in (Komenda et al., 2007) are dif-
ferent from the standard time semantics for timed au-
tomata or timed Petri nets. One has to increase the
number of clocks in order to define a synchronous
product of (max,+) automata viewed as 1-clock timed
automata. This goes in general beyond the class of
(max,+) automata and makes powerful algebraic re-
sults for (max,+) automata difficult to use.
The results of (Gaubert and Mairesse, 1999)
suggest however an alternative for the subclass of
(max,+) automata corresponding to safe timed Petri
nets, where synchronous product is standard com-
position of subnets through shared (synchronization)
transitions. The intermediate formalism of heap mod-
els enables a letter driven (max,+)-linear representa-
tion of 1-safe timed Petri nets. Therefore it is in-
teresting to work with heaps of pieces instead of
(max,+)-automata and introduce a synchronous com-
position of heap models that yields essentially re-
duced nondeterministic (max,+)- automata represen-
tation of synchronous composition of corresponding
(max,+)-automata. This way we obtain representa-
tions allowing for use of powerful dioid algebras tech-
niques and the reduced dimension of concurrent sys-
tems at the same time: the dimension of synchronous
product of two heap models is the sum of each models
dimensions, while the dimension of supervised prod-
uct of (max,+)-automata is the product of the individ-
ual dimensions, which causes an exponential blow up
of the number of states in the number of components.
The extension of supervisory control to timed
DES represented by timed automata is mostly based
on abstraction methods (e.g. region construction turn-
ing a timed automaton into a logical one). On the
other hand abstraction methods are not suitable for
(max,+) or heap automata, because their timed se-
mantics (when weights of transitions are interpreted
as their minimal durations) are based on the earliest
467
Komenda J., Boimond J. and Lahaye S. (2007).
SUPERVISORY CONTROL OF HEAP MODELS USING SYNCHRONOUS COMPOSITION.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 467-475
DOI: 10.5220/0001636104670475
Copyright
c
SciTePress

possible behavior similarly as for timed Petri nets.
The method we propose avoids any abstraction and
works with timed DES (TDES) represented by heap
models. Similarly as for logical DES our approach
to supervisory control is based on the parallel compo-
sition (synchronous product) of the system with the
supervisor (another heap model).
Our research is motivated by applying supervi-
sory control on heap models, which are appropriate
to model 1-safe timed Petri nets. This is realized by
using the synchronous product: the controlled system
is the synchronous product of the system with its con-
troller (another heap model). The algebraization of
the synchronous product that is translated into idem-
potent sum of suitable block matrices together with a
linear representation of composed heap models using
its decomposed morphism matrix is then applied to
the control problem for heap models.
The paper is organized as follows. Algebraic pre-
liminaries needed in the paper are recalled in the next
section. In Section 3 are introduced heap models to-
gether with their synchronous product and their mod-
elling by fixed-point equations in the dioid of for-
mal power series. Section 4 is devoted to the study
of properties of synchronous product of heap models
that will be applied in Section 5 to supervisory con-
trol of heap models. Residuation theory can be used
in supervisory control of heap models.
2 DIOID ALGEBRAS
Basic algebraic structures and their properties that
will be used in the paper are briefly presented in this
section.
An idempotent semiring is a set M endowed with
two inner operations. A commutative and associative
addition denoted ⊕ that has a unit element ε and satis-
fies the idempotency condition (∀a ∈ M : a⊕ a = a).
A second operation, called multiplication, and de-
noted ⊗ is associative and has a unit element e, dis-
tributes over ⊕ both on the left and on the right, and
∀a ∈ M : a ⊗ ε = ε ⊗ a = ε. An idempotent semiring
is said to be commutative if the multiplication ⊗ is
commutative.
There is a naturally defined partial order on any
idempotent semigroup, namely, a b if and only if
a ⊕ b = b. An idempotent semiring M is called to
be complete if any nonempty subset A of M admitss
a least upper bound denoted by
x∈A
x and the dis-
tributivity axiom extends to infinite sums. Idempotent
semirings are usually called dioids.
Let N denote the set of natural numbers with zero.
In complete dioids the star operation can be intro-
duced by the formula
a
∗
=
n∈N
a
n
with a
0
= e. Matrix dioids are introduced in the same
manner as in the conventional linear algebra.
The simplest examples of commutative dioids are
number dioids such as R
max
= (R ∪ {−∞}, max,+)
with maximum playing the role of idempotent addi-
tion, denoted by ⊕: a ⊕ b = max(a, b), and conven-
tional addition playing the role of multiplication, de-
noted by a⊗b or ab when no mistake is possible. Ex-
amples of non commutative dioids are matrix number
dioids, formal languages and formal power series.
Let us recall from (Baccelli et al., 1992) and
(Gaubert, 1992) the following results.
Theorem 2.1 Let D be a complete dioid, x,a,b in D
and
x = x⊗ a⊕ b. (1)
The least solution to equation (1) exists and is given
by b⊗ a
∗
.
Lemma 2.2 Let D be a complete dioid, a,b in D.
Then (a ⊕ b)
∗
= (a
∗
b)
∗
a
∗
= a
∗
(ba
∗
)
∗
= b
∗
(ab
∗
)
∗
=
(b
∗
a)
∗
b
∗
.
In the sequel we will work with the dioid of formal
power series in the noncommutative variables from A
and coefficients from R
max
(corresponding to time).
The standard notation A
∗
is used for the free monoid
of finite sequences (words) from A. The empty word
is denoted by 1. Formal power series form a dioid de-
noted R
max
(A), where addition and (Cauchy or con-
volution) multiplication are defined as follows. For
two formal power series in R
max
(A):
s = ⊕
w∈A
∗
s(w)w) and s
′
= ⊕
w∈A
∗
s
′
(w)w, we have
s⊕ s
′
= ⊕
w∈A
∗
(s(w) ⊕ s
′
(w))w and
s⊗ s
′
= ⊕
w∈A
∗
(⊕
uv=w
s(u)s
′
(v))w.
This dioid is isomorphic to the dioid of generalized
dater functions from A
∗
to R
max
via a natural isomor-
phism similarly as the dioid Z
max
(γ) of formal power
series, used to study Timed Event Graphs (TEG), is
isomorphic to the dioid of daters from Z to Z
max
.
This isomorphism associates to any y : A
∗
→ R
max
the formal power series ⊕
w∈A
∗
y(w)w in R
max
(A). The
zero and identity series are denoted by ε and e, re-
spectively, because it will be clear from the context
whether a number dioid or dioid of formal power se-
ries is meant. Let us recall that ∀w ∈ A
∗
: ε(w) = −∞
and
e(w) =
0 if w = 1
−∞ if w 6= 1.
We consider in the sequel the complete version of
R
max
(A) with coefficients in R
max
∪ ∞. The notion of
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
468

projection will be needed. Similarly as for formal lan-
guages, (natural) projection will be introduced such
that it will be morphism with respect to both ⊕ and
⊗.
Finally, residuation of matrix multiplication will
be needed in Section 5. Residuation theory gener-
alizes the concept of inversion for mappings that do
not necessarily admit an inversion, in particular those
among ordered sets. If f : C → D is a mapping be-
tween two dioids, in most cases there does not exist
a solution to the equation f(x) = b. Instead of so-
lutions to this equation, the greatest solution to the
inequality f(x) b or the least solution to the in-
equality b f(x) are considered. In the case these
exist for all b ∈ D, the mapping f is called residu-
ated, and dually residuated, respectively. The corre-
sponding mappings that to any b ∈ D associate the
greatest, resp. least, solutions of the corresponding
inequalities are called residuated, resp. dually resid-
uated mappings. In this paper only residuated map-
pings of matrix multiplication are used. The residu-
ated mapping of the left matrix multiplication, i.e. the
greatest solution to the inequality A ⊗ X B, is de-
noted A
◦
\B. Similarly, the residuated mapping of the
right matrix multiplication, i.e. the greatest solution
to the inequality X ⊗ A B, is denoted B
◦
/A. Recall
from (Gaubert, 1992) that for matrices A ∈ D
m×n
,B ∈
D
m×p
,C ∈ D
n×p
over a complete dioid D
A
◦
\B ∈ D
n×p
: (A
◦
\B)
ij
=
m
l=1
A
li
◦
\B
l j
B
◦
/C ∈ D
m×n
: (B
◦
/C)
ij
=
p
k=1
B
ik
◦
/C
jk
.
We recall the notation
s∈S
s for the infimal element
of a set S ⊆ D (recall that
s∈S
s is the correspond-
ing supremal element of S when lattice structure of a
complete dioid is considered).
3 SYNCHRONOUS
COMPOSITION OF HEAP
MODELS
Let us first recall the definition of time extension
of heap models (Gaubert and Mairesse, 1999), also
called task-resource systems, which model an impor-
tant class of TDES. Formally, a heap model is the
structure
H = (A,R, r,l,u), where
• A is a finite set of pieces (also called tasks).
• R is a finite set of slots (also called resources).
• r : A → Pwr(R) gives the subset of slots required
by a piece. It is assumed that ∀a ∈ A : R(a) 6=
/
0.
• l : A×R → R ∪ {−∞} is function such that l(a,r)
gives the height of the lower contour of piece a at
the slot r.
• u : A×R → R ∪{−∞} is function such that u(a,r)
gives the height of the upper contour of piece a at
the slot r. By convention, u ≥ l, l(a, r) = u(a, r) =
−∞ if r 6∈ R(a), and min
r∈R(a)
l(a, r) = 0.
The dynamics of heap models is described by row
vectors x(w)
r
, w ∈ A
∗
, r ∈ R corresponding to the
height of the heap w = a
1
... a
n
on slot r ∈ R. It has
been shown in (Gaubert and Mairesse, 1999) that the
upper contour of a heap w, denoted by x(w), and the
overall height of the heap w, denoted y(w), are given
by the following letter driven dynamic equations:
x(1) = (0.. .0) (2)
x(wa) = x(w)µ(a) (3)
y(w) = x(w)(0.. .0)
T
, (4)
where
µ(a)
sr
=
0, if s = r and s 6∈ R(a)
u(a,r) − l(a,s), if r ∈ R(a) and s ∈ R(a)
−∞, otherwise
(5)
is the morphism matrix associated to the heap model
H . It is shown in (Gaubert and Mairesse, 1999) that
heap models are special (max,+)-automata with in-
put and output functions as row, resp. column vec-
tors of identity elements, and the morphism matrix
above. The (max,+)-automaton given by the triple in-
put function, output function, and the morphism ma-
trix described above is then called heap automaton.
Therefore we can associate heap models with special
(max,+)-automata called heap automata.
We assume in the definition of synchronous prod-
uct below that there are no shared resources between
two heap models. Otherwise stated: resources are
shared only by tasks within individual heap mod-
els. This requirement is best understood if one con-
siders safe timed Petri nets (which can be viewed
(Gaubert and Mairesse, 1999) as particular heap mod-
els), where synchronous compositions of subnets is
realized by synchronizing shared transitions (in heap
models tasks), while the set of places (in heap models
resources) of the individual subnets are disjoint.
Definition 3.1 (Synchronous product) Let
H
i
=
(A
i
,R
i
,r
i
,l
i
,u
i
), i = 1, 2 be two heap models with
R
1
∩ R
2
=
/
0. Their synchronous product is the heap
model
H
1
k
H
2
= (A
1
∪ A
2
,R
1
∪ R
2
,r,u,l) (6)
(7)
with
r(a) =
r
1
(a) ∪ r
2
(a), if a ∈ A
1
∩ A
2
r
1
(a), if a ∈ A
1
\ A
2
r
2
(a), if a ∈ A
2
\ A
1
,
SUPERVISORY CONTROL OF HEAP MODELS USING SYNCHRONOUS COMPOSITION
469
u(a,r) =
u
1
(a,r), if r ∈ R
1
u
2
(a,r), if r ∈ R
2
,
and
l(a, r) =
l
1
(a,r), if r ∈ R
1
l
2
(a,r), if r ∈ R
2
.
Since the slots (resources) of component heaps are
disjoint, l and u are well defined: even though A
1
∩
A
2
6=
/
0, for any r ∈ R there is only one i ∈ {1,2},
namely such that r ∈ R
i
, with l
i
(a,r) being defined.
Similarly as in the supervisory control of (logi-
cal) automata the purpose of synchronous product is
twofold. Firstly, explicitly concurrent heap models
(cf. concurrent or modular automata) are heap models
built by the synchronous product of "local" heap mod-
els, whence the interest in studying the properties of
synchronous composition of heap models. Secondly,
synchronous product is used to describe the action of
the supervisor, i.e. interaction of the supervisor with
the system (cf. (Kumar and Heymann, 2000)).
Note that if the above definition is used for con-
trol purposes, it is symmetric with respect to both the
plant (say
H
1
) and the controller (say
H
2
). We then
implicitly assume in the above definition that the su-
pervisor is complete, i.e. that it never attemps to dis-
able an uncontrollable task. This is always true if all
tasks are controllable.
Now (max,+)-linear representation (2), (3), (4) of
heap models will be used in study of the morphism
matrix of the synchronous product of two heap mod-
els. An approach for just in time control of flex-
ible manufacturing systems based on Petri net and
heap models, that builds upon the approach of (Men-
guy, 1997), has been developped in (Al Saba et al.,
2006). Our aim is to develop the control theory di-
rectly for heap models using synchronous composi-
tion of a heap model with its controller (another heap
model).
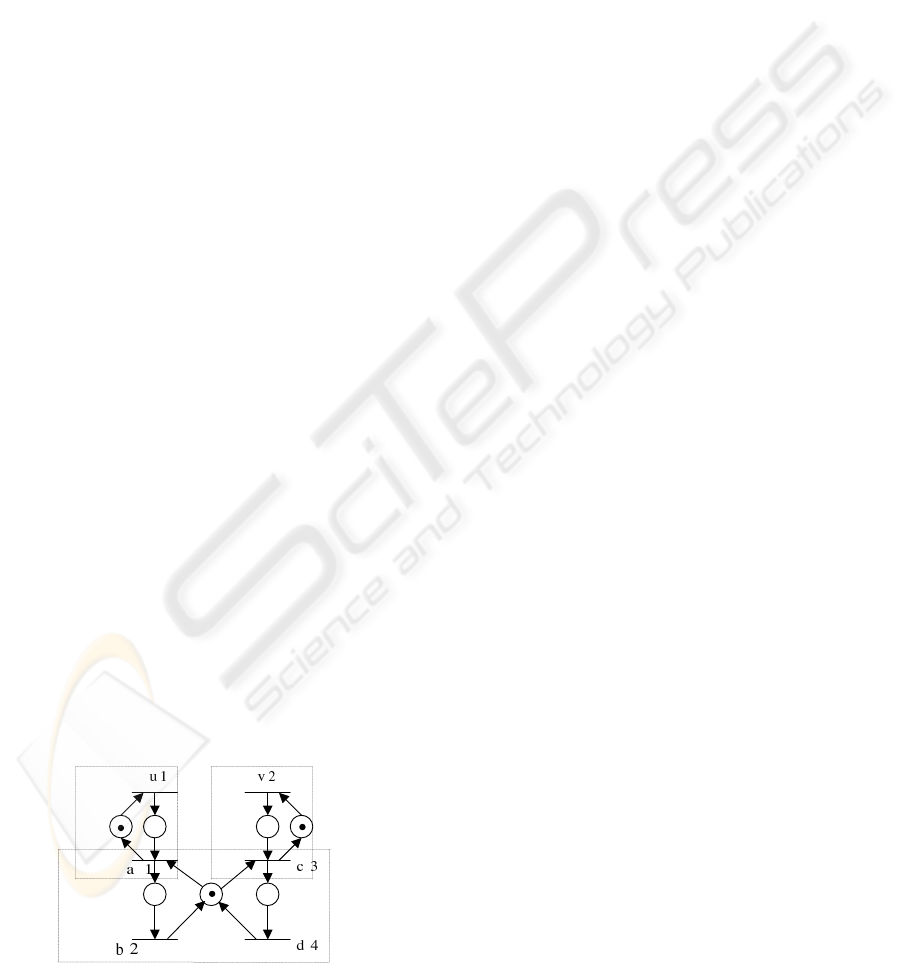
Let us consider the following flexible manufactur-
ing system modelled by Petri net in Figure 1.
Figure 1: The Petri net model of a flexible manufacturing
system.
Note that this 1-safe Petri net is T-timed (timing
is associated to transitions) and it can be decomposed
into three parts, which are synchronized using shared
(synchronization) transitions a and c. Equivalently,
each component of this Petri net can be viewed as a
separate heap model. The "global" heap model cor-
responding to the whole timed Petri net is the syn-
chronous product of "local" heap models.
An order relation on R
max
(A) will be needed for
introduction and study of control problems in Section
5. Let us recall the natural order relation on formal
power series from R
max
(A). For s,s
′
∈ R
max
(A) we
put s s
′
iff ∀w ∈ A
∗
: s(w) ≤ s(w
′
), where in the lat-
ter inequality usual order in R
max
that coincides with
the natural order is used.
Similarly as a TEG admits a linear representation
in the dioid of formal power series Z
max
(γ) (Baccelli
et al., 1992), a heap model admits linear representa-
tion in the dioid of formal power series with noncom-
mutative variables from A: R
max
(A). As example let
us consider the following heap automaton
H .
The set of tasks is A = {a,b,c, d}. The set of re-
sources is R = {r
1
,r
2
,r
3
}. Let r(a) = r(b) = {r
1
,r
2
}
and r(c) = r(d) = {r
1
,r
3
}. The lower and upper con-
tours are given by
l(a, .) = [0 0 − ∞], l(b,.) = [0 0 − ∞]
l(c, .) = [0 − ∞ 0], l(d,.) = [0 − ∞ 0]
u(a,.) = [0 1 − ∞], u(b,.) = [2 0 − ∞]
u(c,.) = [0 − ∞ 3], u(d, .) = [4 − ∞ 0]
It has been shown in (Gaubert and Mairesse, 1999)
that any heap model is a special (max,+)-automaton
with the morphism matrix defined in equation (5).
The graphical interpretation of the morphism matrix
is given in terms of transition weights: µ(a)
ij
= k
means that there is a transition labelled by a ∈ A from
state i to state j with weight k provided k 6= −∞,
in case k = −∞ there is no transition from i to j.
Note that the morphism matrix µ of a heap model
can be also considered as element of R
max
(A)
|R|×|R|
,
i.e. µ = ⊕
w∈A
∗
µ(w)w by extending the definition of µ
from a ∈ A to w ∈ A
∗
using the morphism property
µ(a
1
... a
n
) = µ(a
1
).. .µ(a
n
).
However µ has an important property of being finitely
generated, because it is completely determined by its
values on A. For this reason we have in fact µ
∗
=
(⊕
a∈A
µ(a)a)
∗
. Since we are interested in behaviors
of heap models that are given in terms of µ
∗
we abuse
the notation and write simply µ = ⊕
a∈A
µ(a)a.
The corresponding heap automaton is in Figure
2 below. The state vector is associated to resources
of
H variables (formal power series) x
2
,x
1
,x
3
∈
R
max
(A) from left to right. We obtain the following
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
470

Figure 2: Example of a heap automaton.
equations in dioid R
max
(A) endowed with pointwise
addition and convolution multiplication:
x
1
= x
1
⊗ (0a⊕ 2b⊕ 0c⊕ 4d) ⊕ x
2
⊗ (0a⊕ 2b)
⊕ x
3
⊗ (0c⊕ 4d) ⊕ e
x
2
= x
1
⊗ (1a⊕ 0b)⊕ x
2
⊗ (1a⊕ 0b⊕ 0c⊕ 0d) ⊕ e
x
3
= x
1
⊗ (3c⊕ 0d) ⊕ x
3
⊗ (0a⊕ 0b⊕ 3c⊕ 0d) ⊕ e
y = x
1
⊕ x
2
⊕ x
3
.
The corresponding matrix form is
x = xµ⊕ α
y = xβ,
with x = (x
1
x
2
x
3
), α = (e e e), β = (e e e)
T
, µ =
0a⊕ 2b⊕0c⊕ 4d 1a⊕ 0b 3c⊕ 0d
0a⊕ 2b 1a⊕ 0b⊕ 0c⊕ 0d ε
0c⊕ 4d ε 0a⊕ 0b⊕3c⊕ 0d
.
In general we have the following linear description
of (max,+) automata in the dioid R
max
(A) of formal
power series:
x = xµ⊕ α (8)
y = xβ, (9)
where µ =
a∈A
µ(a)a ∈ R
max
(A) is also called the
morphism matrix.
Recall that the least solution to this equation is y=
αµ
∗
β.
4 MORPHISM MATRIX OF
SYNCHRONOUS PRODUCT OF
HEAP MODELS
Since we introduce supervisory control of heap mod-
els using the synchronous product of the plant heap
model with the controller heap model, it is impor-
tant to study properties of the synchronous product.
In this section the behavior of a synchronous prod-
uct of two heap models will be represented in terms
of morphism matrix of the synchronous product. Ac-
cording to Definition 3.1, the dimension (here number
of resources) of the synchronous product of subsys-
tems is the sum of dimensions of each subsystem. It
should be intuitively clear that morphism matrices of
synchronous products are block matrices, where the
blocks are formed according to dimensions (number
of resources) of the component heap models.
In order to simplify the approach we require that
l(a, r) = 0 whenever r ∈ R(a), which simply means
that pieces are on the ground in all slots. Thus, the
upper contour gives information about the duration of
tasks for different resources used. We recall at this
point that l(a, r) = −∞ for r 6∈ R(a).
Let
H
1
and
H
2
be two heap models with mor-
phism matrices denoted by µ
1
and µ
2
, respectively.
Let ε
ij
, i, j = 1,2 be the rectangular matrices of ze-
ros (−∞) of dimensions m
i
× m
j
and E
i
, i = 1,2 the
square (max,+)-identity matrices of dimensions m
i
×
m
i
. We have the following block form of µ
H
(a), a ∈
A.
Theorem 4.1 The morphism matrix of
H = H
1
k
H
2
admits the following decomposition:
• If a ∈ A
1
∩ A
2
then:
µ
H
(a) =
µ
1
(a)
µ
2
(a)
µ
1
(a) µ
2
(a)
, where
µ
1
(a)
ij
=
µ
1
(a)
i
′
j
: i
′
∈ r
1
(a) arb., if i ∈ r
2
(a)
−∞, if i 6∈ r
2
(a)
and
µ
2
(a)
ij
=
µ
2
(a)
i
′
j
: i
′
∈ r
2
(a) arb., if i ∈ r
1
(a)
−∞, if i 6∈ r
1
(a)
• If a ∈ A
1
\ A
2
then :
µ
H
(a) =
µ
1
(a) ε
12
ε
21
E
2
• If a ∈ A
2
\ A
1
then:
µ
H
(a) =
E
1
ε
12
ε
21
µ
2
(a)
Proof For a ∈ A = A
1
∪ A
2
three cases must be dis-
tinguished. Firstly, a ∈ A
1
∩ A
2
is a shared task. Then
for resources r,s from R
1
∪ R
2
there are four possi-
bilities depending on whether these are in R
1
or R
2
,
whence the block form of µ
H
(a). We recall here
that R
1
∩ R
2
=
/
0. It is easy to see that in the diago-
nal blocks the individual morphism matrices appear.
Also,
µ
1
(a)
ij
=
u(a, j) − l(a,i) = u
1
(a, j)
if i ∈ R
2
(a) and j ∈ R
1
(a)
−∞
if i 6∈ R
2
(a) or j 6∈ R
1
(a)
SUPERVISORY CONTROL OF HEAP MODELS USING SYNCHRONOUS COMPOSITION
471

and similarly for µ
2
(a). Since µ
1
(a)
ij
equals either
u
1
(a, j)(for i ∈ r
2
(a) and j ∈ r
1
(a)) or −∞ otherwise,
we can see that the rows corresponding to i ∈ r
2
(a)
of
µ
1
(a), i.e. µ
1
(a)(i,.), are the same as the rows
µ
1
(a)(i
′
,.) for i
′
∈ r
1
(a), which are all the same, i.e.
an arbitrary one can be taken. Thus, the correspond-
ing entry does not depend on j anymore. Hence, the
morphism matrix of the composed heap µ
H
(a) has
the claimed form. In the much easier situation when
a ∈ A
1
\ A
2
it is sufficient to notice that no resource
from R
2
is used by a. It is easily seen that µ
H
(a) has
again the claimed form. Finally, the case a ∈ A
2
\ A
1
is symmetric.
Theorem 4.1 can be generalized to n ∈ N, where
morphism matrix of synchronous product are matri-
ces with n× n blocks. This is useful for decentralized
control, but in this paper we only need synchronous
product of the system with its controller.
We recall at this point that
µ
H
=
a∈A
µ
H
(a) ⊗ a ∈ R
max
(A).
The algebraization of synchronous product pre-
sented in this section will be useful for control pur-
poses in the next section.
5 SUPERVISORY CONTROL OF
HEAP MODELS
In this section supervisory control of heap models is
studied. The aim is to satisfy a behavioral specifica-
tion given by a formal power series. The closed-loop
system is represented by parallel composition (syn-
chronous product) of the plant with a supervisor to be
found, which is itself represented by a heap model.
In general a supervisor acts on both timing and
logical properties of the plant’s behavior under su-
pervision. Since heap models are special (max,+)-
automata there are two aspects of supervision: dis-
abling and delaying of tasks (events). Here we are
only interested in delaying the different tasks which
is similar to control of TEG in the maxplus algebra,
where input transitions are added in order to delay the
timed behavior of a TEG.
Now we show how Theorem 4.1 can be used
for control of heap models. The synchronous prod-
uct of heap models G = (A
g
,R
g
,r
g
,l
g
,u
g
) and C =
(A
c
,R
c
,r
c
,l
c
,u
c
) of dimensions m and n corresponds
to the controlled (closed-loop) system. The event al-
phabet of the controlled system is denoted by A. Ac-
cording to Definition 3.1, we have A = A
g
∪A
c
. Let us
denote the morphism matrices of G and C by µ
g
and
µ
c
, respectively. Now let us return to the description
of behaviors of heap models in the dioid of formal
power series R
max
(A). The vector of formal power
series from R
max
(A) associated to generalized dater
functions x
G kC
: A
∗
→ R
m×n
max
satisfies the following
equations:
x
G kC
= x
G kC
µ
G kC
⊕ α, (10)
y
G kC
= x
G kC
β, (11)
where µ
G kC
is the morphism matrix of
G kC , α and
β are row, resp. column, vectors of 0’s of dimen-
sion m + n. The structure of the morphism matrix
described in Theorem 4.1 is now used for control pur-
poses. According to Theorem 2.1 the greatest solu-
tions to equations (10) and (11) are
x
G kC
= αµ
∗
G kC
, (12)
y
G kC
= αµ
∗
G kC
β, (13)
whence an interest in studying properties of µ
∗
G kC
.
Given a specification behavior (e.g. language or
formal power series), the goal in supervisory control
of DES is to find a supervisor that achieves this speci-
fication as the behavior of the controlled system. In
a first approach we assume, similarly as in control
of TEG, that the structure of the controller is given,
which means here that the controller heap model only
delays task executions of the plant. This is done by
the choice of upper contour functions ( i.e. duration of
controller’s tasks) from µ
c
(u). The delaying effect of
the controller is naturally realized via its tasks (tran-
sitions of the corresponding heap automaton) shared
with the plant heap.
The morphism matrix of the composed system is
given by
µ
C kG
=
u∈A
c
\A
g
µ
C kG
(u)u⊕
a∈A
c
∩A
g
µ
C kG
(a)a
⊕
a∈A
g
\A
c
µ
C kG
(a)a.
In order to simplify the approach our attention is
from now on limited to the case A
c
= A
g
, which is a
standard assumption in the supervisory control with
complete observations. Since state vector in equa-
tion (8) is associated to resources, it can be written as
x
C kG
= (x u), where the first component corresponds
to the (uncontrolled) plant heap and the second to the
controller heap. Owing to Theorem 4.1 we have:
(x u) = (x u)
a∈A
H(a)a
¯
F(a)a
¯
H(a)a F(a)a
⊕ (α
1
,α
2
),
where α
1
and α
2
are vectors of zeros of correspond-
ing dimensions, µ
g
(a) is for convenience denoted by
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
472

H(a), µ
g
(a) by
¯
H(a), µ
c
(a) by F(a), and µ
c
(a) by
¯
F(a). This can be written as
(x u) = (x u)
A
¯
F
¯
A F
⊕ α,
where H =
a∈A
H(a)a and similarly for F,
¯
F, and
¯
H. Hence,
x = xH ⊕ u
¯
H ⊕ α
1
u = x
¯
F ⊕ uF ⊕ α
2
.
Theorem 2.1 yields u = (x
¯
F ⊕ α
2
)F
∗
as the least
solution of the second equation, which substituted
into the first equation leads to
x = xH ⊕
(x
¯
F ⊕ α
2
)F
∗
¯
H ⊕ α
1
.
The least solution is given by
x = (α
2
F
∗
¯
H ⊕ α
1
)(H ⊕
¯
FF
∗
¯
H)
∗
. (14)
The last equation can be viewed as the expression
of the closed-loop system using the feedback given
by F. Notice that unlike classical control theory the
control variables have their inner dynamics, which is
caused by adopting a supervisory control approach,
where a controller is itself a dynamical system of the
same kind as the uncontrolled system. Therefore, our
¯
F, which plays the role of feedback mapping, is de-
termined by inner dynamics of the controller given by
its morphism matrix F.
There is a strong analogy with the feedback ap-
proach for control of TEG, see (Cottenceau et al.,
2001), which should not be surprising, because super-
visory control (realized here by synchronous product)
is based on a feedback control architecture. In super-
visory control the control specification (as counterpart
of reference output from control of TEG using dioid
algebras) are given in terms of behaviors of (max,+)
automata (i.e. formal power series). In fact, for a ref-
erence output y
ref
we are interested in the greatest F
such that
y ≤ y
ref
,
thus,
(α
2
F
∗
¯
H ⊕ α
1
)(H ⊕
¯
FF
∗
¯
H)
∗
β ≤ y
ref
. (15)
We obtain from Lemma 2.2 that
(H ⊕
¯
FF
∗
¯
H)
∗
= H
∗
(
¯
FF
∗
¯
HH
∗
)
∗
,i.e.
inequality (15) becomes
(α
2
F
∗
¯
H ⊕ α
1
)H
∗
(
¯
FF
∗
¯
HH
∗
)
∗
β ≤ y
ref
(16)
Note that while ⊗ and ⊕ are lower semicontinu-
ous and residuated, the Kleene star is not in general,
but only when the image is suitably constrained (in
which case it is trivially residuated with identity as
the corresponding residuated mapping). Moreover,
as follows from Theorem 4.1,
¯
F can be simply ex-
pressed using F. Hence, there is a hope that at least
in some special cases residuation theory (see Section
2) can be applied to obtain the greatest series F cor-
responding to the "controller part" of the morphism
matrix µ
G kC
such that y
G kC
satisfies a given specifi-
cation (e.g. is less than or equal to a given reference
output series y
ref
). In fact we obtain from the above
inequality the greatest
¯
FF
∗
such that inequality (16)
is satisfied. Thus it is not an easy problem. The sit-
uation is much simpler in case
¯
F = F and
¯
H = H.
This is satisfied if we assume that the controller heap
model has the same number of resources as the un-
controlled heap model and the logical structure of the
controller (given by r
c
: A → Pwr(R
c
)) mimicks the
structure of the plant, formally there exists an isomor-
phism between R
c
and R
g
such that r
c
and r
g
are equal
up to this isomorphism. In terms of Petri nets this
can be interpreted as having a controller net with the
same net topology (i.e. logical structure as the uncon-
trolled net), i.e. in the closed-loop system there are
always parallel places of the controller corresponding
to places of the uncontrolled net. The role of the con-
troller is only to act on the system through holding
times of the controller’s places that correct the hold-
ing times of the places in the original net. Because of
the fixed parallel structure of the controller it is clear
that the controller can in this case only delay the firing
of the transitions, which are all shared by the system
and the controller.
It is easy to check that Theorem 4.1 in such a case
gives
¯
F = F as well as
¯
H = H and α
1
= α
2
= α, row
vector of zeros of dimension n. Hence, inequality (15)
becomes α(F
∗
H ⊕ E)(H ⊕
¯
FF
∗
H)
∗
β ≤ y
ref
, where
E is the identity matrix. An easy calculation yields
(H ⊕
¯
FF
∗
H) = (E ⊕ F
+
)H = F
∗
H, hence
(F
∗
H ⊕ E)(F
∗
H)
∗
= (F
∗
H)
+
⊕ (F
∗
H)
∗
= (F
∗
H)
∗
.
Thus, y = α(F
∗
H)
∗
β ≤ y
ref
, i.e. the problem is to find
the greatest F such that
(F
∗
H)
∗
≤ α
◦
\y
ref
◦
/β.
Since the Kleene star is not a residuated mapping
in general, such a problem has only a solution if
α
◦
\y
ref
◦
/β, playing the role of reference model G
ref
from (Cottenceau et al., 2001) is of a special form to
be studied. Let us notice that H ≥ E, which follows
from the form of morphism matrix and the usual as-
sumption that any resource of the system is used by
at least one task: ∀r ∈ R
g
∃a ∈ A such that r ∈ r
g
(A).
The following Lemma is useful.
Lemma 5.1 If H ≥ E then for any B ∈ R
max
(A)
n×n
every solution of (X
∗
H)
∗
≤ B is a solution of
H(X
∗
H)
∗
≤ B and vice versa.
SUPERVISORY CONTROL OF HEAP MODELS USING SYNCHRONOUS COMPOSITION
473

Proof If X a solution of (X
∗
H)
∗
≤ B, then (X
∗
H)
∗
=
E ⊕(X
∗
H)
+
≤ B, hence also (X
∗
H)
+
≤ B. Therefore,
H(X
∗
H)
∗
≤ X
∗
H(X
∗
H)
∗
= (X
∗
H)
+
≤ B,
where the first inequality follows from isotony of mul-
tiplication and E ≤ X
∗
. Conversely, if X is a solu-
tion of H(X
∗
H)
∗
≤ B, then (X
∗
H)
∗
= E ⊗ (X
∗
H)
∗
≤
H(X
∗
H)
∗
≤ B as follows from isotony of multiplica-
tion and the assumption that E ≤ H.
Using Lemma 5.1 our problem is to find the greatest
solution in F of
H(F
∗
H)
∗
≤ α
◦
\y
ref
◦
/β.
It follows from Lemma 2.2 that
H(F
∗
H)
∗
= (H ⊕ F)
∗
= H
∗
(FH
∗
)
∗
,
thus we get formally the same problem as the one
solved in (Cottenceau et al., 2001) with H
∗
playing
the role of transfer function H in the TEG setting.
The following result adapted from (Cottenceau et al.,
2001), Proposition 3, is useful: If there exists D ∈
R
max
(A) such that α
◦
\y
ref
◦
/β = H
∗
D
∗
or there exists
D
′
∈ R
max
(A) such that α
◦
\y
ref
◦
/β = D
′∗
H
∗
then there
exists the greatest F such that H
∗
(FH
∗
)
∗
≤ α
◦
\y
ref
◦
/β,
namely
F
opt
= H
∗
◦
\[α
◦
\y
ref
◦
/β]
◦
/H
∗
= αH
∗
◦
\y
ref
◦
/H
∗
β.
In the special case we have restricted attention to, our
methods yields the gretest feedback such that timing
specification given by y
ref
is satisfied, provided y
ref
is of one of the special forms. In the special case of a
controller with fixed logical structure only timed be-
havior is under control.
If we are interested in manufacturing systems,
where specificatons are given in terms of Petri nets,
the reference output is not typically required to be met
for all sequences of tasks, but only those having a real
interpretation. These are given by the correponding
(logical) Petri net language, say L. Thus, the problem
is to find the greatest F, such that
αH
∗
(FH
∗
)
∗
β char(L) ≤ y
ref
char(L),
where char(L) =
w∈L
e.w is the series with Boolean
coefficients, i.e. the formal series of language L. Let
us recall (Gaubert and Mairesse, 1999) that such a
restricton is formally realized by the tensor product
(residuable operation) of the heap automaton with the
logical (marking) automaton recognizing the Petri net
language L, which is compatible with Theorem 4.1 of
(Komenda et al., 2007).
Note that specifications based on (multivariable)
formal power series are not easy to obtain in many
practical problems, in particular those coming from
production systems, often represented by Petri nets.
In fact, given a reference output series amounts to
solve a scheduling problem. A formal power series
specification is not given, but it is to be found: e.g.
using Jackson rule (Jackson, 1955).
6 CONCLUSION
It has been shown how methods of dioid algebras can
be used in supervisory control of heap models. We
have proposed a synchronous product of heap models.
The structure of the morphism matrix of synchronous
product of two heap models is derived and applied to
control of heap models.
The present reseach is a very first step in control
of heap automata. Sharing of resources is only al-
lowed inside component heap models. Of potential
interest is supervisory control with partial controlla-
bility, partial observations, and decentralized control
of heap automata.
ACKNOWLEDGEMENTS
Partial financial support of Université d’Angers, of
the Grant Agency GA AV No. KJB100190609, and
of the Academy of Sciences of the Czech Republic,
Institutional Research Plan No. AV0Z10190503 is
gratefully acknowledged.
REFERENCES
M. Al Saba, J.L. Boimond, and S. Lahaye. On just in time
control of flexible manufacturing systems via dioid
algebra. Proceedings of INCOM’06, Saint-Etienne,
France, vol.2, pp. 137-142, 2006.
F. Baccelli, G. Cohen, G.J. Olsder and J.P.Quadrat (1992).
Synchronization and linearity. An algebra for discrete
event systems. New York, Wiley.
B. Cottenceau, L. Hardouin, J.L. Boimond, and J.L. Ferrier.
Model Reference Control for Timed Event Graphs in
Dioid, Automatica, vol. 37, pp. 1451-1458, 2001.
S. Gaubert. Théorie des systèmes linéaires dans les dioïdes.
Thèse de doctorat, Ecole des Mines de Paris, 1992.
S. Gaubert. Performance evaluation of (max,+) automata,
IEEE Trans. on Automatic Control, 40(12), pp. 2014-
2025, 1995.
S. Gaubert and J. Mairesse. Task resource models and
(max,+) automata, In J. Gunawardena, Editor: Idem-
potency. Cambridge University Press, 1997.
S. Gaubert and J. Mairesse. Modeling and analysis of timed
Petri nets using heaps of pieces. IEEE Trans. on Au-
tomatic Control, 44(4): 683-698, 1999.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
474

J.R. Jackson. Scheduling a Production Line to Minimize
Maximum Tardiness. Research report 43. University
of California Los Angeles. Management Science Re-
search Project.
J.Komenda, M.Al Saba, and J.L. Boimond. Supervisory
Control of Maxplus Automata: Quantitative Aspects.
In Proceedings ECC 2007, Kos (Greece).
R. Kumar, M. Heymann. Masked prioritized synchroniza-
tion for interaction and control of discrete-event sys-
tems, IEEE Transaction Automatic Control 45, 1970-
1982, 2000.
F. Lin and W.M. Wonham, On Observability of Discrete-
Event Systems, Information Sciences, 44: 173-198, 1
E. Menguy. Contribution à la commande des systèmes
linaires dans les diodes. Thèse de doctorat, Université
d’Angers, 1997.
P.J. Ramadge and W.M. Wonham. The Control of Discrete-
Event Systems. Proc. IEEE, 77:81-98, 1989.
J. Sifakis and S. Yovine. Compositional specification of
timed systems. Proceedings of the 13th Symp. on The-
oretical Aspects of Computer Science, STACS’96, pp.
347-359, 1996. LNCS 1046.
SUPERVISORY CONTROL OF HEAP MODELS USING SYNCHRONOUS COMPOSITION
475
