
MULTIMODAL COMMUNICATION ERROR DETECTION FOR
DRIVER-CAR INTERACTION
Sy Bor Wang, David Demirdjian, Trevor Darrell
Massachusetts Institute of Technology, 32 Vassar Street, Cambridge MA 02139, USA
Hedvig Kjellstr
¨
om
KTH (Royal Institute of Technology), CSC, SE-100 44 Stockholm, Sweden
Keywords:
Audio-Visual Recognition, System Error Identification, Conversational systems.
Abstract:
Speech recognition systems are now used in a wide variety of domains. They have recently been introduced in
cars for hand-free control of radio, cell-phone and navigation applications. However, due to the ambient noise
in the car recognition errors are relatively frequent. This paper tackles the problem of detecting when such
recognition errors occur from the driver’s reaction. Automatic detection of communication errors in dialogue-
based systems has been explored extensively in the speech community. The detection is most often based on
prosody cues such as intensity and pitch. However, recent perceptual studies indicate that the detection can be
improved significantly if both acoustic and visual modalities are taken into account. To this end, we present a
framework for automatic audio-visual detection of communication errors.
1 INTRODUCTION
In recent years, there has been an increased interest
in more intelligent and emotional car interfaces. This
has been motivated by the need to make driver-car in-
teractions easier and more natural and to reduce the
cognitive load of the driver, who is now confronted
with multiple device, e.g. phone, radio, navigation
system. To this extent, speech recognition technol-
ogy has recently been introduced in the car. However,
due to the difficulty of the environment (e.g. noise
produced by the engine, vibrations), speech recog-
nition is still brittle and satisfying recognition rates
can be obtained only for relatively small vocabular-
ies, limiting the extent of the driver-car interaction. A
speech recognition system that can automatically de-
tect recognition errors would allow for smoother in-
teraction.
Many spoken dialogue systems have difficulty de-
termining whether the communication is going well
or has problems (e.g. due to poor speech recogni-
tion). Various researchers have shown that human
users change their speaking style when the system
misrecognizes their speech as compared to when the
system correctly recognized their speech (Hirschberg
et al., 2001; Litman et al., 2001; Oviatt and VanGent,
1998). For example, users tend to speak slower or
louder when speech misrecognition occurs. Such a
change in speaking style usually leads to worse recog-
nition results since standard speech recognizers are
trained on normal, non-hyperarticulated speech (Ovi-
att and VanGent, 1998). These problems motivated
the monitoring of prosodic aspects of a speaker’s ut-
terances, and several studies have shown that using
automatically extracted prosodic features helps in er-
ror detection (Litman et al., 2001). However, the
level of effectiveness of these prosodic features dif-
fers across studies and the analysis of prosodic fea-
tures are done only on user utterances and not on au-
dio cues of users while they are listening to the sys-
tem response. Such limitations hint at the possible
use of additional modalities or other types of features
(e.g. visual features) to improve error detection.
The co-occurrence of audio and visual modali-
ties has been widely explored for emotion recogni-
tion. Recent work in multimodal recognition of emo-
tions has shown that a combination of prosodic fea-
tures and facial expressions improves affect recog-
nition (Zeng et al., 2004). The primary aim of our
work in this paper is to find an automatic system to
detect communication errors in a conversational sys-
tem. Using both visual and audio features, we com-
365
Bor Wang S., Demirdjian D., Darrell T. and Kjellström H. (2007).
MULTIMODAL COMMUNICATION ERROR DETECTION FOR DRIVER-CAR INTERACTION.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 365-371
DOI: 10.5220/0001637603650371
Copyright
c
SciTePress

pare the performance of different classifiers in the uni-
modal stream and different audio-visual fusion strate-
gies for identification, taking into account asynchrony
between acoustic and visual user reactions, using au-
dio and video data of user interactions with a dialogue
system in a natural setting.
2 RELATED WORK
There has been limited literature on the use of low-
level audio cues and visual features in automatically
detecting dialogue-based system errors in an authen-
tic environment. A perceptual study conducted by
Barkhuysen et al. (Barkhuysen et al., 2004) showed
that audio and visual cues are useful in detecting com-
munication errors. The study also showed that using
visual cues were very effective for detecting system
errors when the user is listening in silence to the re-
ply from the dialog manager. In this study though,
subjects were specifically instructed to face a camera
embedded in a cellphone while speaking to it. Knowl-
edge of this camera could bias the subject’s behav-
ior. As shown by Sebe et al. (Sebe et al., 2004), this
knowledge bias was significant for learning facial ex-
pressions. In this work, subjects were viewing movie
clips in a kiosk, without any knowledge of a cam-
era capturing their facial expressions. However, no
prosody or audio cues of the subjects were collected.
Recent work done in emotion or affect recog-
nition has explored the combined use of prosody
and facial features (Zeng et al., 2004; Chen et al.,
1998). Zeng et al. (Zeng et al., 2004) used a vot-
ing method to combine the facial feature and prosody
classifiers to improve affect recognition. Although
this work addressed the difficult task of classifying
eleven emotional states, it suffers from the use of a
database where subjects generated emotions upon re-
quest, which may not be the genuine expressions in
an authentic environment.
In the domain of detecting communication errors,
also known as system errors, audio cues have been
explored widely. Oviatt (Oviatt and VanGent, 1998)
showed that there is a pattern of hyper-articulation
when there are system errors, which leads to worse
recognition results. Litman et al. (Litman et al., 2001)
and Hirschberg et al. (Hirschberg et al., 2001) auto-
matically extracted prosodic features of a speaker’s
utterances and showed that these features have been
useful in error detection, although the extent to which
prosody is beneficial differs across studies. This im-
plies that the accuracy of error detection can be im-
proved by the addition of other features, e.g. visual
cues, either as a combination with audio cues or sim-
Figure 1: Illustration of communication errors. In a., the
subject is making a query of a restaurant the first time. In
b., the subject is listening to the response of the system. And
in c., the subject repeats his query. The facial expression of
the user in b. and c., as well as the tone of the user’s voice
in c. are the cues our algorithm exploits for the detection of
communication errors.
ply as a separate stream.
In this paper we propose to detect communication
errors multimodally by using visual and audio fea-
tures. We focus on an environment where the user
is interacting with a conversational information query
system similar to the ones present in car navigation
systems. We define a communication error as the
instance where the system misrecognizes the driver
speech, and makes an erroneous reply. This is illus-
trated in Figure 1. We detect the presence of this error
when the user is speaking or when the user is listening
to the system.
The rest of the paper is described as follows. First,
we describe the features we extract from audio and
visual streams to measure confusion. Then we give
a description of our classification models and late fu-
sion strategies, followed by our experiment setup and
procedure. In the last section, we show comparative
results of the different classifiers.
3 MULTIMODAL INPUT
3.1 Visual Component
In this section we describe our algorithm for estimat-
ing head pose and facial motion features from monoc-
ular image sequences. In our framework, head mo-
tion is decomposed into two distinct components. The
first component consists of the 3D rigid motion of the
head. The second component consists of the local
motion generated by the non-rigid parts of the face
(e.g. mouth, lips, eyes).
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
366
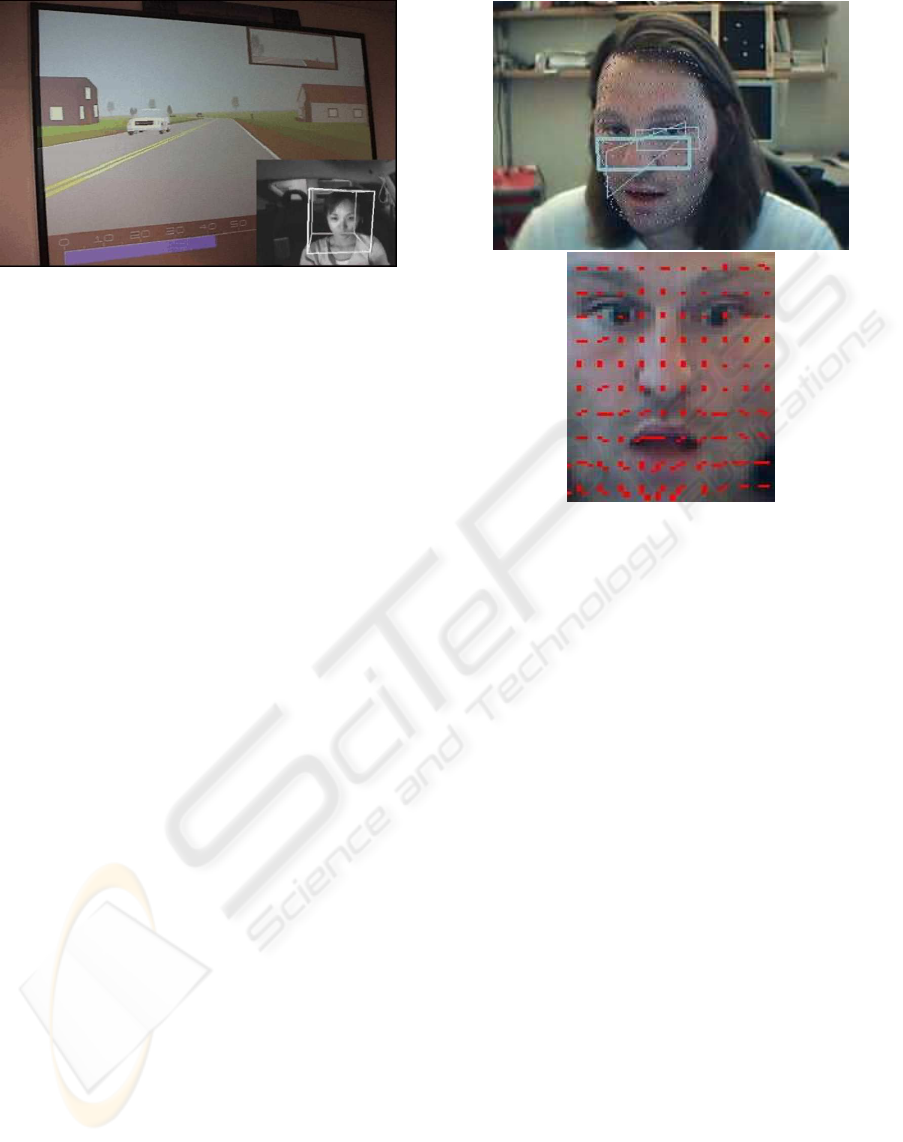
Figure 2: Audio-visual platform installed in a car simulator.
The face of the driver is tracked using a camera installed
near the rear view mirror: the white cube surrounding the
driver’s face corresponds to Π, the location and orientation
of the pose estimate.
The head motion estimation algorithm consists of
first estimating the rigid motion component of the
head by using a robust algorithm. This rigid motion
then is used to compensate the global motion of the
head and to estimate the local motion of the non-rigid
parts.
3.1.1 Head Motion and Pose Estimation
The algorithm for head motion and pose estimation is
an implementation of the drift-free tracking technique
described in (Morency et al., 2003). In contrast to the
original work, which required stereo inputs, our im-
plementation estimates head pose in monocular image
sequences. In addition motion estimation is based on
the robust estimator RANSAC (Fischler and Bolles,
1981) which allows large noise in the data (e.g. tem-
porary occlusions of the face). The face tracking al-
gorithm is initialized in a standard fashion using a
frontal-view face detector (Viola and Jones, 2004).
Our algorithm provides the head pose in a 3D co-
ordinate system and is represented by a 6-vector Π:
Π = (t
x
, t
y
, t
z
, φ
α
, φ
β
, φ
γ
) (1)
where (t
x
, t
y
, t
z
) is the location and (φ
α
, φ
β
, φ
γ
) the ori-
entation (pan, tilt and swing angles) of the head.
3.1.2 Facial Motion Features
Let δ be the rigid motion between the last two frames
t − 1 and t. The facial motion features are defined as
the head motion-compensated optical flow, i.e. the op-
tical flow between the images I
t−1
and I
t
from which
the motion δ has been ‘subtracted’. The facial motion
features correspond to the local non-rigid motion gen-
erated by the muscles of the face only (e.g. lips, jaw,
eyes), independent from the global head motion. In
Figure 3: Our head motion estimation algorithm consists
in estimating the rigid motion component (left image) and
compensated optical flow on the face surface (right image).
our framework, the vision-based features are defined
as:
V
f
= ( ¯u(m
1
), . . . , ¯u(m
N
)) (2)
where ¯u(m
k
) is the head motion-compensated optical
flow for a point m
k
of the face.
3.2 Audio Component
We use three kinds of prosody features: the intensity
E, the pitch, F
0
, and the first formant frequency, F
1
.
The prosody feature vector A
f
is then defined as:
A
f
= (E, F
0
, F
1
) (3)
These features are computed at every 10 msecs us-
ing the speech analysis software, PRAAT (Boersma,
2001). The intensity E is computed as: E =
log(
∑
N
i=1
(x[i] − ¯x)
2
) where N is the window length
and x[i] is the ith sample in that window and ¯x is the lo-
cal average signal value. In our computation (and for
the rest of this section) we used a window length of 40
samples. The pitch F
0
is estimated as the reciprocal
of the fundamental period as described in (Boersma,
1993). In our experiments, we set the search range of
the pitch to be 75 - 1000 Hz. As for the computation
of the first formant frequency, F
1
, a segment of N sam-
ples is extracted for every time step of 1 msec. This
segment is multiplied by a Gaussian-like window and
MULTIMODAL COMMUNICATION ERROR DETECTION FOR DRIVER-CAR INTERACTION
367

the LPC coefficients are computed. This first formant
is then extracted using these coefficients by the Burg
algorithm described in (Childers, 1978).
In previous work (Sebe et al., 2004) syllable rate
was used as a prosody feature. However, in our work,
our audio data consists of spoken as well as non-
spoken words, e.g. exclamations, gasps or humming,
which we want to model for automatic problem de-
tection. and our speech recognizer had a lot of dif-
ficulty computing an accurate syllable rate. Of the
219 utterances processed by the speech recognizer,
97 utterances have an incorrect number of hypothe-
sized vowel phones. On average, these incorrectly
recognized utterances have 2.73 syllables more than
the hypothesized ones.
4 MULTIMODAL DETECTION
OF SYSTEM ERRORS
We explore different techniques to detect communi-
cation errors from sequences of audio-visual features
estimated in Section 3.2. First, we describe unimodal
classification models followed by the multimodal fu-
sion strategies we tested.
4.1 Unimodal Classification Methods
We want to map an observation sequence x to class
labels y ∈
Y , where x is a vector of t consecutive ob-
servations, x = {x
1
, x
2
, . . . x
t
}. In our case, the local
observation x
t
can be an audio feature A
f
, or a visual
feature, V
f
.
To detect communication errors, learning the se-
quential dynamics of these observations is important.
Hidden Markov Models (HMMs) (Rabiner, 1989) are
well known generative probabilistic sequence models
that capture sequence dynamics; Hidden Conditional
Random Fields (HCRFs) (Quattoni et al., 2004; Wang
et al., 2006) are discriminative analogs that have been
recently introduced for gesture recognition. We com-
pare both techniques in our experiments below; exper-
iments with classifiers taking a single observation as
input previously demonstrated poor results, and were
not included in our experiments.
Hidden Markov Models (HMM) - We trained a
HMM model for each communication state. During
evaluation, test sequences were passed through each
of these models and the model with the highest like-
lihood was selected as the recognized communication
state. This is a generative, sequential model with hid-
den states. More details of this model are described
in (Rabiner, 1989).
Hidden Conditional Random Fields (HCRF)
- The HCRF is a model that has recently been
introduced for the recognition of observation se-
quences (Quattoni et al., 2004). Here we describe the
HCRF model briefly:
A HCRF models the conditional probability of a
class label given an observation sequence by:
P(y | x, θ) =
∑
s
P(y, s | x, θ) =
∑
s
e
Ψ(y,s,x;θ)
∑
y
′
∈Y ,s∈S
m
e
Ψ(y
′
,s,x;θ)
(4)
where s = {s
1
, s
2
, ..., s
m
}, each s
i
∈ S captures certain
underlying structure of each class and S is the set of
hidden states in the model. If we assume that s is ob-
served and that there is a single class label y then the
conditional probability of s given x becomes a regular
CRF. The potential function Ψ(y, s, x;θ) ∈ ℜ, param-
eterized by θ, measures the compatibility between a
label, the observation sequence, and the configuration
of the hidden states.
In our paper, the local observations are the visual
features, V
f
, or the audio features, A
f
. We trained a
single two-class HCRF. Test sequences were run with
this model and the communication state class with the
highest probability was selected as the recognized er-
ror state.
For the HMM model, the number of Gaussian
mixtures and states was set by minimizing the error
on training features. For the HCRF model, the num-
ber of hidden states was set in a similar fashion.
4.2 Multimodal Fusion Strategies
We have a choice between early or late fusion when
combining the audio and visual modalities. In early
fusion, we can model the audio and visual features
in a single joint feature space, and use the joint fea-
ture for training a single classifier. In late fusion, we
can train a classifier on each modality separately and
merge the outputs of the classifiers. As illustrated in
Figure 1, our communication error detection has two
different modes: in b. we use visual features only for
error detection and in c. we use both audio and visual
features. The single mode in b. requires us to train
a classifier using a single input stream. In addition,
training classifiers based on individual streams is a
simpler process. As such, we choose late fusion tech-
niques, i.e. fusing the outputs of two classifiers. We
use two common late-fusion strategies as described
in (Kittler et al., 1998).
Let the feature input to the j-th classifier, j =
1, ..., R be x
j
, and the winning label be h. A uniform
prior across all classes is assumed.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
368
PRODUCT rule: h = argmax
k
R
∏
j=1
P(w
k
|x
j
).
With the product rule, we multiply the probabilities
of the visual feature classifier and the audio feature
classifier, and select the winning class based on the
highest scoring multiplication.
SUM rule: h = argmax
k
R
∑
j=1
P(w
k
|x
j
).
With the sum rule, we add the probabilities of the vi-
sual feature classifier and the audio feature classifier,
and select the winning class based on the highest scor-
ing sum.
5 EXPERIMENTS AND RESULTS
5.1 Data Collection
To evaluate the performance of the different classifiers
and fusion strategies, we collected an audio-visual
database where the facial expressions and the audio
cues would correspond to the actual conversational
state of the subject. There were several design issues
we had to consider to minimize bias of our data col-
lection experiment. These issues were approached in
a similar fashion to the database collected for natu-
ral facial expressions (Sebe et al., 2004). In particu-
lar, the subjects could not know that they were being
tested for their communication state
1
. Such knowl-
edge could influence their communication state and
invalidate the results.
We set up a conversational kiosk with a hidden
camera and microphone array. This kiosk contained a
web-based navigation query speech interface consist-
ing of a display showing a Google map with restau-
rant icons. Subjects did not know that they were in-
volved in an experiment about communication error
detection: they were told their task was to test the
navigation system and report what they liked or dis-
liked about it at the end of the experiment. They were
given a list of restaurants to query for information.
The subjects had to make the queries in sequential
order, and repeat the query in any way they wished
(e.g. repeating the same question, or using a different
phrase) when the system did not respond correctly.
They could only proceed to the next query when the
system displayed the correct restaurant information
on the display. The purpose of this sequential query
was to create a need to solve the communication er-
ror when it occurs. The audio and video of the user
1
At the end of the experiment, we procured agreement
for the use of the audio-visual footage from the subjects for
our experiments.
0 0.2 0.4 0.6 0.8 1
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
False Positives
True Positives
HMM
HCRF
0 0.2 0.4 0.6 0.8 1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
True Positives
False Positives
HMM
HCRF
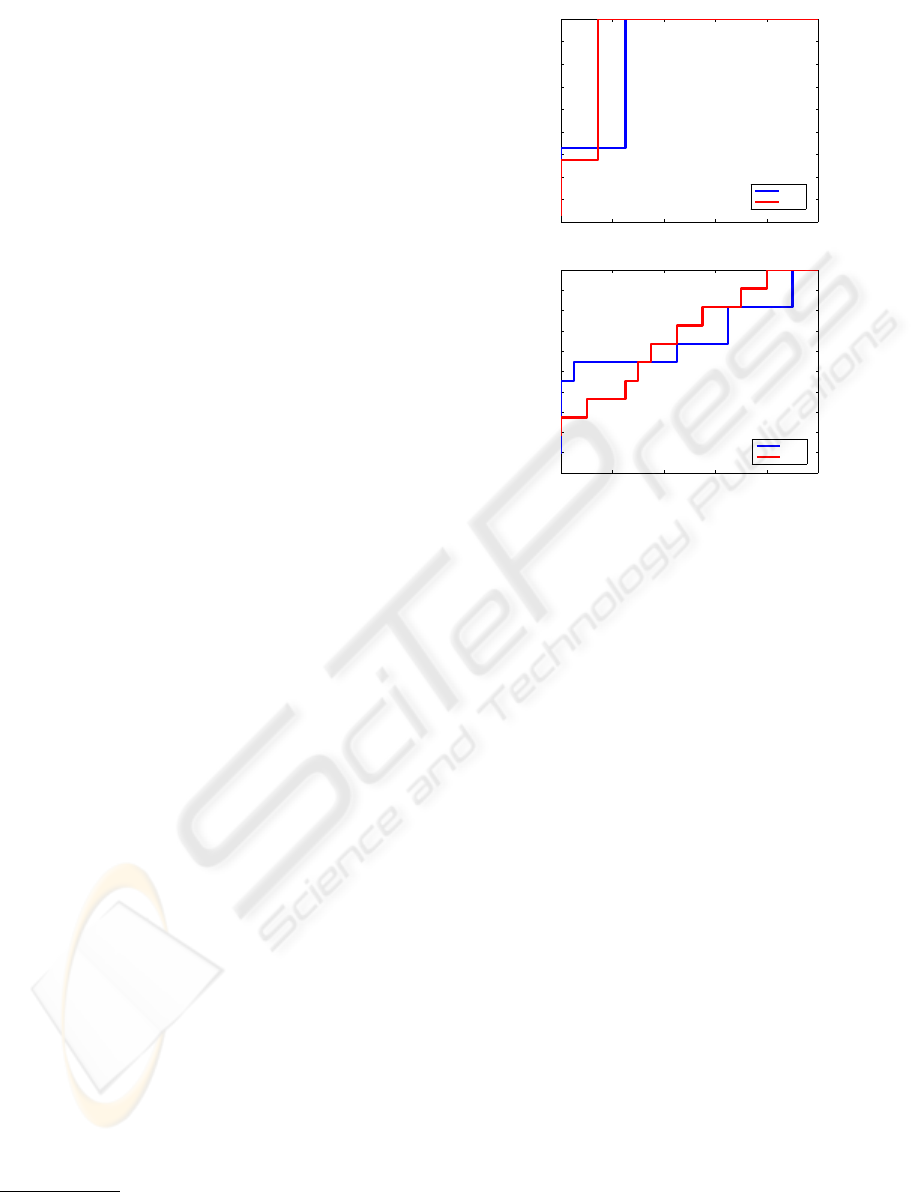
Figure 4: (top) ROC curves showing the performance of the
different classifiers of visual features. (bottom) ROC curves
showing the performance of the different classifiers using
prosody features. From this figure, HMMS and HCRFs do
not perform well on the prosody features, while HCRFs per-
form much better than HMMs on visual features.
were recorded throughout the whole experiment un-
der brightly lit and low noise conditions. The video
was recorded at 15 Hz and the audio at 44kHz. A total
of six subjects performed the study. All six subjects
were male and were between 20-30 years of age.
From the database described above, all the se-
quences were manually labeled and segmented for
training our classifiers described in Section 4.1. A to-
tal of 227 error sequences and 84 error-free ones were
collected. For each human subject, 90% of his/her
data were picked at random and used for training,
while the remaining ones were used for testing.
5.2 Testing and Evaluation
5.2.1 Visual Features Classification
Facial motion features, V
f
, described in Section 3.1
are used as observations for training and testing. Fig-
ure 4 shows the results of the classifiers described in
Section 4.1 using visual features. From this figure,
HCRF performs better than HMMs for visual feature
classification.
MULTIMODAL COMMUNICATION ERROR DETECTION FOR DRIVER-CAR INTERACTION
369
5.2.2 Prosody Features Classification
Using prosody features, A
f
, from Section 3.2 as ob-
servations, we trained two classifiers described in
Section 4.1. Figure 4 shows the ROC curves for the
different classifiers. From this figure, both HCRFs
and HMMs perform poorly for prosody feature clas-
sification. This is due to the use of only three acoustic
characteristics as our prosody features and shows that
such features are not very indicative of communica-
tion problems.
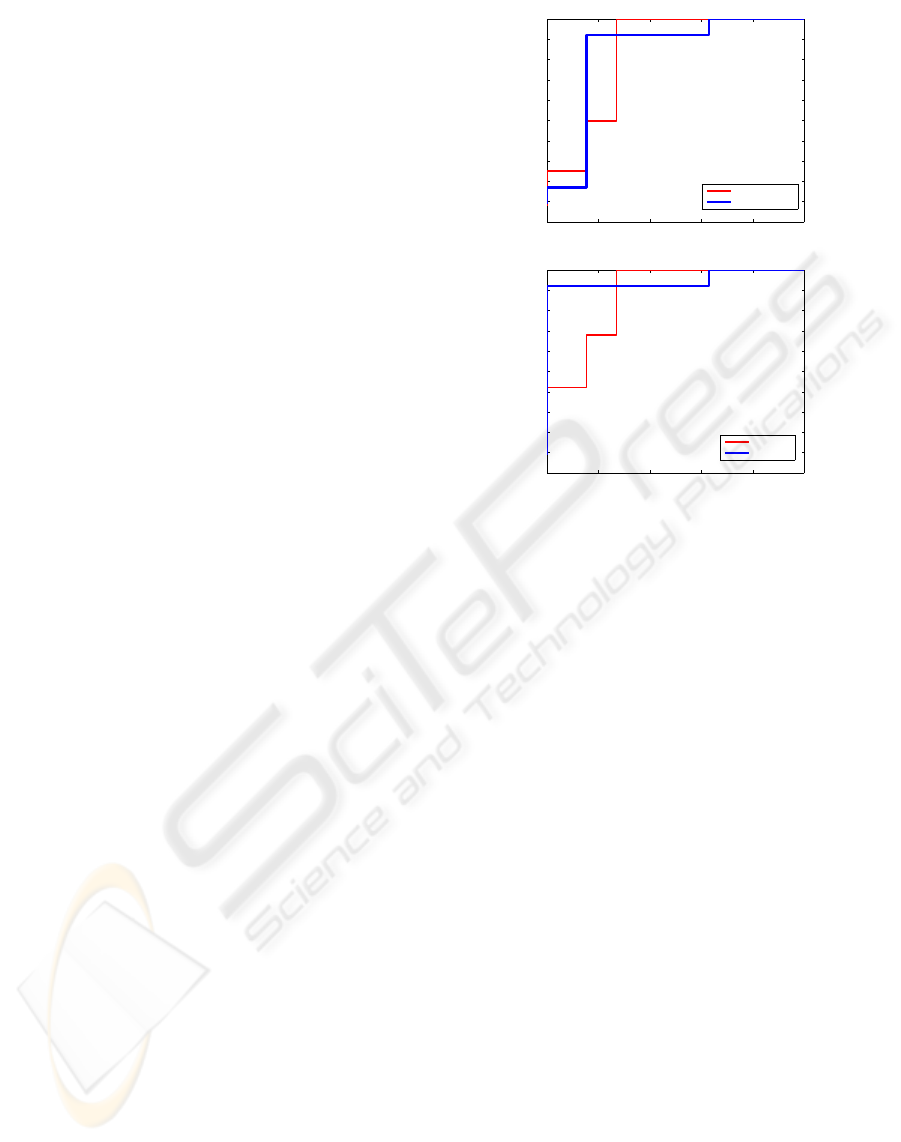
5.2.3 Audio-Visual Classification
We compared the performance of HMMs and HCRFs
in the late fusion experiments. Figure 5 shows the
ROC curve of the combining the various classifiers
using the SUM and PRODUCT rule. The classi-
fiers show a significant improvement using the late fu-
sion strategies, despite a poor performance when only
prosody features are used. Interestingly, this concurs
with findings in the area of audio-visual speech per-
ception (Massaro, 1987; Summerfield, 1987), indi-
cating that humans fuse information from different
modalities at a relatively late stage. In addition, fu-
sion of HCRF classifiers performed better than fusion
of HMM classifiers. Using the SUM rule to combine
the HCRF classifiers produced the best result.
6 CONCLUSIONS
In this paper, we presented experiments evaluating
different classification and fusion methods for detect-
ing communication errors in a conversational system.
Authentic audio-visual data of human-dialogue inter-
actions with the conversational system was collected
and labeled according to the presence of communica-
tion errors, and used to train and test the automatic
system.
Features extracted from the audio included differ-
ent prosody characteristics, such as pitch and inten-
sity and the first formant frequency. From the visual
channel, the user’s global head motion and local face
motion were extracted. Different strategies for clas-
sification from these cues were evaluated, as well as
strategies for fusion of the two modalities. Despite the
problems associated with asynchrony of audio and vi-
sual features, we used simple late fusion strategies of
our HCRF and HMM classifiers and showed that they
have improved error detection. To summarize, we
find that communication errors in a dialogue-based
system can be detected with a better accuracy using
0 0.2 0.4 0.6 0.8 1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
True Positives
False Positives
Fusion using the Product rule
HMM PRODUCT
HCRF PRODUCT
0 0.2 0.4 0.6 0.8 1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
True Positives
False Positives
Fusion using the SUM rule
HMM SUM
HCRF SUM
Figure 5: (top) ROC curve showing the performance of dif-
ferent classifiers using PRODUCT rule for fusion.(bottom)
ROC curve showing the performance of different classifiers
using SUM rule for fusion. Both curves show that despite
poor performance from the audio stream, late fusion im-
proved the performance significantly. In addition, HCRFs
perform better than HMMs after fusion.
a HCRF with audio-visual input and a fusion strategy
using the SUM rule.
REFERENCES
Barkhuysen, P., Krahmer, E., and Swerts, M. (2004). Au-
diovisual perception of communication problems. In
Speech Prosody.
Boersma, P. (1993). Accurate short-term analysis of the fun-
damental frequency and the harmonis-to-noise ratio of
a sampled sound. In IFA.
Boersma, P. (2001). Praat, a system for doing phonetics by
computer. Glot International, 5(9/10):341–345.
Chen, L., Huang, T. S., Miyasato, T., and Nakatsu,
R. (1998). Multimodal human emotion/expression
recognition. In International Conference on Face and
Gesture Recognition.
Childers, D. G. (1978). Modern Spectrum Analysis. IEEE
Press.
Fischler, M. A. and Bolles, R. C. (1981). Random sample
consensus: a paradigm for model fitting with appli-
cations to image analysis and automated cartography.
Communications of the ACM, 24(6):381–395.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
370

Hirschberg, J., Litman, D., and Swerts, M. (2001). Identify-
ing user corrections automatically in spoken dialogue
systems. In 2nd Meeting of the North American Chap-
ter of the Association for Computational Linguistics
on Language Technologies.
Kittler, J., Hatef, M., Duin, R., and Matas, J. (1998). On
combining classifiers. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 20(3):226–239.
Litman, D., Hirschberg, J., and Swerts, M. (2001). Predict-
ing user reactions to system error. In ACL.
Massaro, D. (1987). Speech Perception By Ear and Eye.
Lawrence Erlbaum Associates, Hillsdale, NJ, USA.
Morency, L., Rahimi, A., and Darrell, T. (2003). Adaptive
view-based appearance models. In IEEE Conference
on Computer Vision and Pattern Recognition, pages
803–810.
Oviatt, S. L. and VanGent, R. (1998). Error resolution
during multimodal human-computer interaction. In
SpeechCommunication.
Quattoni, A., Collins, M., and Darrell, T. (2004). Condi-
tional random fields for object recognition. In Neural
Information Processing Systems.
Rabiner, L. R. (1989). A tutorial on hidden markov models
and selected applications in speech recognition. Pro-
ceedings of the IEEE, 77(2):257–286.
Sebe, N., Lew, M., Cohen, I., Sun, Y., Gevers, T., and
Huang, T. S. (2004). Authentic facial expression anal-
ysis. In International Conference on Automatic Face
and Gesture Recognition.
Summerfield, Q. (1987). Some preliminaries to a compre-
hensive account of audio-visual speech perception. In
Dodd, B. and Campbell, R., editors, Hearing by Eye,
pages 3–51. Lawrence Erlbaum Associates, Hillsdale,
NJ, USA.
Viola, P. and Jones, M. J. (2004). Robust real-time face
detection. International Journal of Computer Vision,
57(2):137–154.
Wang, S., Quattoni., A., Morency, L.-P., Demirdjian, D.,
and Darrell, T. (2006). Hidden conditional random
fields for gesture recognition. In IEEE Conference on
Computer Vision and Pattern Recognition.
Zeng, Z., Tu, J., Liu, M., Zhang, T., Rizzolo, N., Zhang, Z.,
Huang, T. S., Roth, D., and Levinson, S. (2004). Bi-
modal hci-related affect recognition. In International
Conference on Multimodal Interfaces.
MULTIMODAL COMMUNICATION ERROR DETECTION FOR DRIVER-CAR INTERACTION
371
