
MAKING SENSOR NETWORKS INTELLIGENT
Peter Sapaty
Institute of Mathematical Machines & Systems, National Academy of Sciences
Glushkova Ave 42, Kiev 03187, Ukraine
Masanori Sugisaka
Department of Electrical and Electronic Engineering, Oita University
700 Oaza Dannoharu 870-1192 Japan
Joaquim Filipe
Departamento Sistemas e Informática, Escola Superior de Tecnologia de Setúbal
Setúbal 2910-761, Portugal
Keywords: Sensor networks, intelligent management, distributed scenario language, distributed interpreter, tracking
objects, hierarchical data fusion.
Abstract: A universal solution for management of dynamic sensor networks will be presented, covering both
networking and application layers. A network of intelligent modules, overlaying the sensor network,
collectively interprets mission scenarios in a special high-level language that can start from any nodes and
cover the network at runtime. The spreading scenarios are extremely compact, which may be useful for
energy saving communications. The code will be exhibited for distributed collection and fusion of sensor
data, also for tracking mobile targets by scattered and communicating sensors.
1 INTRODUCTION
Sensor networks are a sensing, computing and
communication infrastructure that allows us to
instrument, observe, and respond to phenomena in
the natural environment, and in our physical and
cyber infrastructure (Culler at al., 2004; Chong,
Kumar, 2003). The sensors themselves can range
from small passive microsensors to larger scale,
controllable platforms. Their computation and
communication infrastructure will be radically
different from that found in today's Internet-based
systems, reflecting the device- and application-
driven nature of these systems.
Of particular interest are wireless sensor
networks, WSN (Wireless; Zhao, Guibas, 2004)
consisting of spatially distributed autonomous
devices using sensors to cooperatively monitor
physical or environmental conditions, such as
temperature, sound, vibration, pressure, motion or
pollutants, at different locations. WSN, however,
have many additional problems in comparison to the
wired ones. The individual devices in WSN are
inherently resource constrained--they have limited
processing speed, storage capacity, and
communication bandwidth. These devices have
substantial processing capability in the aggregate,
but not individually, so we must combine their many
vantage points on the physical phenomena within the
network itself. In addition to one or more sensors,
each node in a sensor network is typically equipped
with a radio transceiver or other wireless
communications device, a small microcontroller, and
an energy source, usually a battery. The size of a
single sensor node can vary from shoebox-sized
nodes down to devices the size of grain of dust.
Typical applications of WSNs include
monitoring, tracking, and controlling. Some of the
specific applications are habitat monitoring, object
tracking, nuclear reactor controlling, fire detection,
92
Sapaty P., Sugisaka M. and Filipe J. (2007).
MAKING SENSOR NETWORKS INTELLIGENT.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 92-100
DOI: 10.5220/0001640200920100
Copyright
c
SciTePress
traffic monitoring, etc. In a typical application, a
WSN is scattered in a region where it is meant to
collect data through its sensor nodes. They could be
deployed in wilderness areas, where they would
remain for many years (monitoring some
environmental variable) without the need to
recharge/replace their power supplies. They could
form a perimeter about a property and monitor the
progression of intruders (passing information from
one node to the next). At present, there are many
uses for WSNs throughout the world.
In a wired network like the Internet, each router
connects to a specific set of other routers, forming a
routing graph. In WSNs, each node has a radio that
provides a set of communication links to nearby
nodes. By exchanging information, nodes can
discover their neighbors and perform a distributed
algorithm to determine how to route data according
to the application’s needs. Although physical
placement primarily determines connectivity,
variables such as obstructions, interference,
environmental factors, antenna orientation, and
mobility make determining connectivity a priori
difficult. Instead, the network discovers and adapts
to whatever connectivity is present.
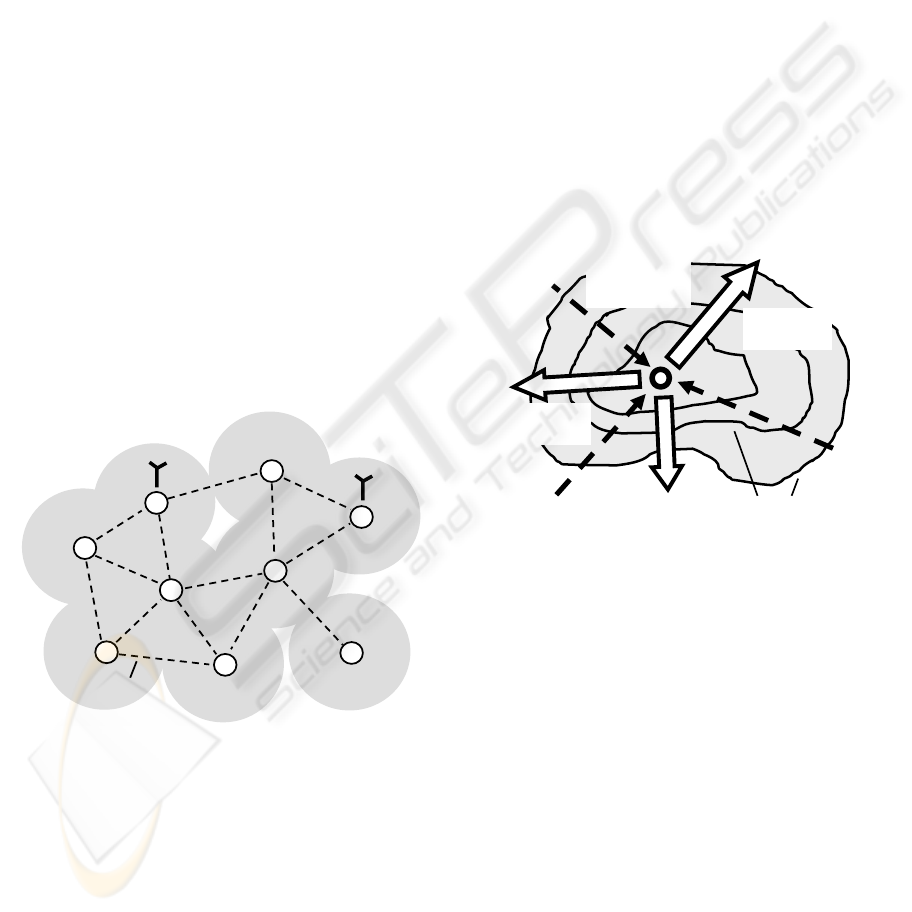
Fig. 1 shows what we will mean as a sensor
network for the rest of this paper.
S
S
S
S
S
S
S
S
S
Transmitter
Transmitter
Sensor
Sensor
Sensor
Local communication
capabilities
Figure 1: Distributed sensors and their emergent network.
It will hypothetically consist of (a great number of)
usual sensors with local communication capabilities,
and (a limited number of) those that can additionally
transmit collected information outside the area (say,
via satellite channels). Individual sensors can be on a
move, some may be destroyed while others added at
runtime (say, dropped from the air) to join the
existing ones in solving cooperatively distributed
problems.
The aim of this paper is to show how any
imaginable (or even so far unimaginable) distributed
problems can be solved by dynamic self-organized
sensor networks if to increase their intelligence as a
whole, with a novel distributed processing and
control ideology and technology effectively
operating in computer networks.
2 THE DISTRIBUTED
MANAGEMENT MODEL
The distributed information technology we are using
here is based on a special Distributed Scenario
Language (DSL) describing parallel solutions in
computer networks as a seamless spatial process
rather than the traditional collection and interaction
of parts (agents). Parallel scenarios in DSL can start
from any interpreter of the language, spreading and
covering the distributed space at runtime, as in Fig. 2.
Spreading
activities
Hierarchical
echoing and
control
Advances in space
Start
Spreading
activities
Figure 2: Runtime coverage of space by parallel scenarios.
The overall management of the evolving scenarios is
accomplished via the distributed track system
providing hierarchical command and control for
scenario execution, with a variety of special echo
messages. We will mention here only key features of
DSL, as the current language details can be found
elsewhere (Sapaty et al., 2007), also its basics from
the previous versions (Sapaty, 1999, 2005; Sapaty et
al., 2006).
A DSL program, or wave, is represented as one
or more constructs called moves (separated by a
comma) embraced by a rule, as follows:
wave → rule ({ move , })
Rules may serve as various supervisory, regulatory,
coordinating, integrating, navigating, and data
processing functions, operations or constraints over
moves.
MAKING SENSOR NETWORKS INTELLIGENT
93

A move can be a constant or variable, or
recursively an arbitrary wave itself:
move → constant | variable | wave
Variables classify as nodal, associated with space
positions and shared by different waves, frontal,
moving in space with program control, and
environmental, accessing the environment navigated.
Constants may reflect both information and physical
matter.
Wave, being applied in a certain position of the
distributed world, can perform proper actions in a
distributed space, terminating in the same or in other
positions. It provides final result that unites local
results in the positions (nodes) reached, and also
produces resultant control state. The (distributed)
result and the state can be subsequently used for
further data processing and decision making on
higher program levels. Parallel waves can start from
different nodes in parallel, possibly intersecting in
the common distributed space when evolving in it
independently.
If moves are ordered to advance in space one
after the other (which is defined by a proper rule),
each new move is applied in parallel in all the nodes
reached by the previous move. Different moves (by
other rules) can also apply independently from the
same node, reaching new nodes in parallel. The
functional style syntax shown above can express any
program in DSL, but if useful, other notations can be
used, like the infix one. For example, an
advancement in space can use period as operator
(separator) between successive steps, whereas
parallel actions starting from same node can be
separated by a semicolon. For improving readability,
spaces can be inserted in any places of the programs-
-they will be automatically removed before
execution (except when embraced by quotes).
The interpreter may have its own physical body
(say, in the form of mobile or humanoid robot), or
can be mounted on humans (like in mobile phones).
A network of the interpreters can be mobile and
open, changing its volume and structure, as robots or
humans can move at runtime. We will be assuming
for the rest of this paper that every sensor has the
DSL interpreter installed, which may have a
software implementation or can be a special
hardware chip.
In the following sections we will show and
explain the DSL code for a number of important
problems to be solved by advanced sensor networks,
which confirms an efficiency of the proposed
distributed computational and control model.
3 ELEMENTARY EXAMPLE
3.1 The Task
An elementary task to be programmed in DSL may
look like follows. Let it needs to go to the physical
locations of a disaster zone with coordinates (using
x-y pair here for simplicity) x25_y12, x40_y36, and
x55_y21, measure temperature there, and transmit
its value, together with exact coordinates of the
locations reached, to a collection center. The
corresponding program in DSL will be as follows:
Hop(x25_y12, x40_y36, x55_y21).
Transmit(Temperature & Location)
The program moves independently to the three
locations given, and in every destination reached
measures temperature using special environmental
variable Temperature. Using another
environmental variable Location, it attaches to
the previous value exact coordinates of the current
physical position (which, by using GPS, may differ
from the initially intended, rough coordinates). The
two-value results are then independently transmitted
from the three locations to a collection center.
This program reflects semantics of the task to be
performed in a distributed space, regardless of
possible equipment that can be used for this. The
latter may, for example, be a set of sensors scattered
in advance throughout the disaster zone, where
hopping by coordinates may result in a wireless
access of the sensors already present there--not
necessarily moving into these points physically. As
another solution, this program may task mobile
robots (single or a group) to move into these
locations in person and perform the needed
measurement and transmission upon reaching the
destinations.
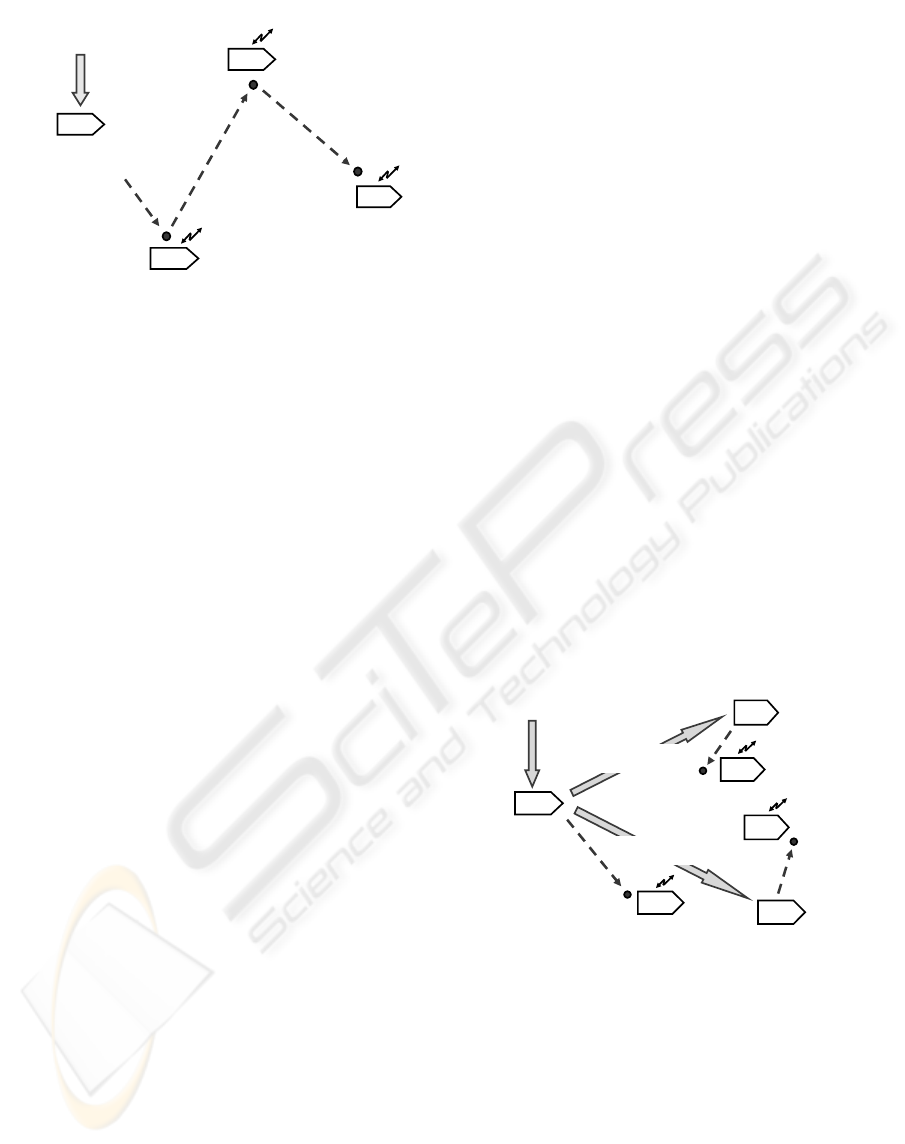
3.2 Single-Robot Solution
Let us consider how the previous program will be
executed with only a single robot available (let it be
Robot 1, assuming other robots not reachable). After
its injection into the robot’s interpreter (see Fig. 3),
the first, broadcasting statement:
Hop(x25_y12, x40_y36, x55_y21)
will be analyzed first. It naturally splits into three
independent hops, but only one can be performed at
the start by a single robot.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
94
x25_y12
x55_y21
x40_y36
Hop(x25_y12, x40_y36,
x55_y21). Transmit
(Temperature &
Location)
Hop(x40_y36, x55_y21).
Transmit (Temperature
& Location)
Hop(x55_y21).
Transmit
(Temperature
& Location)
Robot 1
Robot 1
Robot 1
Robot 1
Transmit
(Temperature
& Location)
Program
injection
Hop(x25_y12, x40_y36, x55_y21).
Transmit(Temperature & Location)
Figure 3: Single-robot solution.
The interpreter hops virtually into the point
x25_y12 ordering robot to move into the
corresponding physical location. Upon arrival, the
second statement:
Transmit(Temperature & Location)
will be executed by measuring temperature,
attaching coordinates, and transmitting the result via
channels available. The rest of the program,
represented as:
Hop(x40_y36, x55_y21).
Transmit(Temperature & Location)
will be analyzed again, with hop to x40_y36
extracted, robot moved into the second location, and
measurement result transmitted as before. The
program’s remainder, now as:
Hop(x55_y21).
Transmit(Temperature & Location)
will cause movement and operation in the third
location x55_y21. The program terminates after
shrinking to:
Transmit(Temperature & Location)
All these steps are depicted detail in Fig. 3.
3.3 Multiple-Robot Solution
Let us consider now the case where other robots can
be requested and accessed from the robot into which
we injected our program (let it be Robot 1 again),
see Fig. 4. After analyzing the first statement,
splitting it into individual hops and attaching to each
of them the replicated rest of the program (i.e.
second statement) the interpreter in Robot 1 will
produce the following three independent programs:
Hop(x25_y12).
Transmit(Temperature & Location)
Hop(x40_y36).
Transmit(Temperature & Location)
Hop(x55_y21).
Transmit(Temperature & Location)
Leaving one of them (say, the first) for execution in
itself, Robot 1 requesting other available robots (let
them be Robot 2 and Robot 3) by a wireless channel
sends electronically the obtained other two programs
to them. After this, all three programs will be
operating in the three mentioned robots
independently and in parallel.
Each robot first executes the hop statement,
moving into the location given by physical
coordinates, and upon reaching the destination,
executes the second statement measuring
temperature and detecting exact coordinates,
subsequently transmitting these to the collection
center, exactly as for the previous case with a single
robot. All this is depicted in detail in Fig. 4.
x25_y12
x55_y21
x40_y36
Hop(x25_y12).
Transmit
(Temperature &
Location)
Transmit(Temperature
& Location)
Robot 1
Robot 2
Robot 1
Hop(x25_y12, x40_y36, x55_y21).
Transmit(Temperature & Location)
Transmit
(Temperature
& Location)
Transmit
(Temperature
& Location)
Hop(x55_y21). Transmit
(Temperature & Location)
Hop(x40_y36). Transmit
(Temperature & Location)
Initial
program
injection
Spreading
to other
robots
Robot 3
Robot 2
Robot 3
Figure 4: Multiple-robot solution.
The shown above were only elementary examples of
DSL code and rules of its execution. In other, more
complex cases DSL allows us to dynamically form
networked knowledge arbitrarily distributed between
dynamic resources, also providing hierarchical
control of distributed processes. DSL can provide
description of system missions on a semantic level,
with telling what, where, and why to do rather than
how and who should do this, effectively abstracting
from the resources (computer networks, robots,
MAKING SENSOR NETWORKS INTELLIGENT
95

humans) that can implement them, which can be
emergent and not known in advance. These
programs can be executed by any number of
technical or biological processors, where
organization of resources, their communication and
synchronization are delegated to efficient automatic
interpretation, with strict and simple implementation
rules.
Application programs in DSL are often hundreds
of times shorter than in conventional languages (like
C or Java). The DSL programs are interpreted rather
than compiled, adjusting to the execution
environment at runtime, which is especially
important when system components may be changed
or damaged during the execution. The approach is
based on the new, universal, formal system within
which any distributed and parallel algorithms can be
expressed and implemented.
4 COLLECTING EVENTS
THROUGHOUT THE REGION
Starting from all transmitter nodes, the following
program regularly (with interval of 20 sec.) covers
stepwise, via local communications between sensors,
the whole sensor network with a spanning forest,
lifting information about observable events in each
node reached. Through this forest, by the internal
interpretation infrastructure, the lifted data in nodes
is moved and fused upwards the spanning trees, with
final results collected in transmitter nodes and sent
in parallel outside the system using rule Transmit
(See Fig. 5).
Hop(all transmitters).
Loop(
Sleep(20).
IDENTITY = TIME.
Transmit(
Fuse(
Repeat(free(observe(events));
Hop(directly reachable,
first come)))))
Globally looping in each transmitter node (rule
loop), the program repeatedly navigates (rule
repeat) the sensor set (possibly, in competition
with navigation started from other transmitters),
activating local space observation facilities in
parallel with the further navigation.
The resultant forest-like coverage is guaranteed
by allowing sensor nodes to be visited only once, on
the first arrival in them. The hierarchical fusion rule
fuse, collecting the scattered results, also removes
record duplicates, as the same event can be detected
by different sensors, leaving only most credible in
the final result. To distinguish each new global
navigation process from the previous one, it always
spreads with a new identity for which, for example,
current system time may be used (using
environmental variables IDENTITY and TIME of
the language).
S
S
S
S
S
S
S
S
S
Failed
Start
Start
Fused
data
Global
loop
Global
loop
Repeated
parallel
navigation
Figure 5: Parallel navigation and data collection.
5 CREATING HIERARCHICAL
INFRASTRUCTURES
In the previous program, we created the whole
spanning forest for each global data collection loop,
which may be costly. To optimize this process, we
may first create a persistent forest infrastructure,
remembering which nodes were linked to which, and
then use it for a frequent regular collection and
fusion of the scattered data. As the sensor
neighborhood network may change over time, we
can make this persistent infrastructure changeable
too, updating it with some time interval (much larger,
however, than the data collection one), after
removing the previous infrastructure version. This
can be done by the following program that regularly
creates top-down oriented links named infra
starting from the transmitter nodes (as shown in Fig.
6).
Hop(all transmitters).
Loop(
Sleep(120).
IDENTITY = TIME.
Repeat(
Hop(directly reachable,
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
96

first come).
Remove links(all).
Stay(create link(-infra, BACK)))
S
S
S
S
S
S
S
S
S
infra
infra
infra
Persistent
links
Looping
updates
Looping
updates
Active
code
Figure 6: Runtime creation of hierarchical infrastructure.
This infrastructure creation program provides
competitive asynchronous spatial processes, so each
time even if the sensors do not change their positions,
the resultant infrastructure may differ, as in Fig. 7.
S
S
S
S
S
S
S
S
S
infra
infra
infra
infra
Figure 7: Another possible infrastructure.
Having created a persistent infrastructure, we can
use it frequently by the event collection program,
which can be simplified now as follows:
Hop(all transmitters).
Loop(
Sleep(20).
Transmit(
Fuse(
Repeat(
Free(observe(events));
Hop(+infra)))))
The global infrastructure creation program (looping
rarely) and the event collection and fusion one
(looping frequently) can operate simultaneously,
with the first one guiding the latter on the data
collection routes, which may change over time.
6 ROUTING LOCAL EVENTS TO
TRANSMITTERS
We have considered above the collection of
distributed events in the top-down and bottom-up
mode, always with the initiative stemming from root
nodes of the hierarchy--the latter serving as a
parallel and distributed tree-structured computer. In
this section, we will show quite an opposite, fully
distributed solution, where each sensor node, being
an initiator itself, is regularly observing the vicinity
for the case an event of interest might occur.
Having discovered the event of interest, each
node independently from others launches a spatial
cyclic self-routing process via the infrastructure
links built before, which eventually reaches the
transmitter node, bringing with it the event
information, as shown in Fig. 8. The data brought to
the transmitters should be fused with the data
already existing there.
S
S
S
S
S
S
S
S
S
infra
infra
Event
discovered
Event
discovered
Observing
Observing
Observing
Figure 8: Routing scattered events to transmitters.
The corresponding program will be as follows.
Hop(all nodes).
Frontal(Transfer).
Nodal(Result).
Loop(
Sleep(5).
Nonempty(
Transfer = observe(events)).
Repeat(hop(-infra)).
Result = Result & Transfer)
MAKING SENSOR NETWORKS INTELLIGENT
97

The transmitter nodes accumulating and fusing local
events, arriving from sensor nodes independently,
can subsequently send them outside the system.
Different strategies can be used here. For example,
one could be waiting until there are enough event
records collected in the transmitter before sending
them, and the other one waiting for a threshold time
and only then sending what was accumulated (if any
at all). The following program combines these two
cases within one solution, where arriving data from
sensors is accumulated in nodal variable Result.
Hop(all transmitters).
Loop(
Or(
Quantity(Result) >= 100,
(Sleep(60). Result != nil)).
Transmit(Result))
This program in every transmitter can work in
parallel with the previous program collecting events
and looping in every sensor (in transmitters as well,
assumed to be sensors too), and also with the earlier
program, starting in transmitters, for the regular
infrastructure updates.
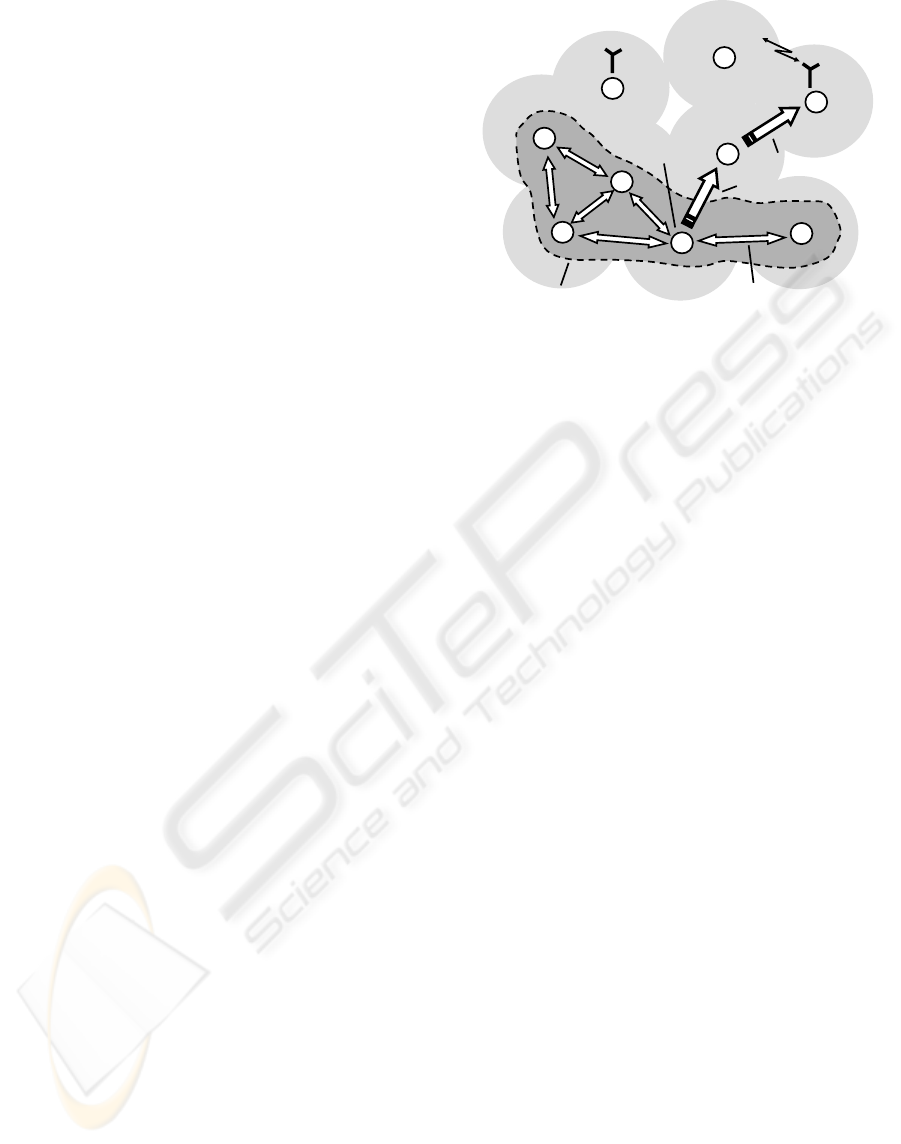
7 TRACKING MOBILE OBJECTS
Let us consider some basics of using DSL for
tracking mobile (say ground or aerial) objects
moving through a region controlled by
communicating sensors, as shown in Fig. 9. Each
sensor can handle only a limited part of space, so to
keep the whole observation continuous the object
seen should be handed over between the neighboring
sensors during its movement, along with the data
accumulated during its tracking and analysis.
The space-navigating power of the model
discussed can catch each object and accompany it
individually, moving between the interpreters in
different sensors, thus following the movement in
physical space via the virtual space (Sapaty, 1999).
This allows us to have an extremely compact and
integral solution unattainable by other approaches
based on communicating agents. The following
program, starting in all sensors, catches the object it
sees and follows it wherever it goes, if not seen from
the current point any more (more correctly: if its
visibility becomes lower than a given threshold).
S
S
S
S
S
S
S
S
S
Moving
object
Tracking mobile
intelligence
Looping
in nodes
Figure 9: Active tracking of a mobile object.
Hop(all nodes).
Frontal(Threshold) = 0.1.
Frontal(Object) = search(aerial).
Visibility(Object) > Threshold.
Repeat(
Loop(
Visibility(Object) > Threshold).
Maximum destination(
Hop(directly reachable).
Visibility(Object) > Threshold))
The program investigates the object’s visibility in all
neighboring sensors in parallel and moves control
along with program code and accumulated data to
the neighboring sensor seeing it best (if visibility
there exceeds the threshold given).
This was only a skeleton program in DSL,
showing the space tracing techniques for controlling
single physical objects. It can be extended to follow
collectively behaving groups of physical objects (say,
flocks of animals, mobile robots, or troops). The
spreading individual intelligences can cooperate in
the distributed sensor space, self-optimizing jointly
for the pursuit of global goals.
8 AVERAGING PARAMETERS
FROM A REGION
Let us consider how it could be possible to asses the
generalized situation in a distributed region given,
say, by a set of its border coordinates, in a fully
distributed way where sensors located in the region
communicate with direct neighbors only. Assume,
for example, that the data of interest is maximum
pollution level throughout the whole region (it may
also be temperature, pressure, radiation level, etc.)
together with coordinates of the location showing
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
98
this maximum.
The following program, starting in all sensors
located in the region, regularly measures the
pollution level in its vicinity, updates local
maximum and, by communication with direct
neighbors, attempts to increase the recorded
maximum there too. Eventually, after some time of
this purely local communication activity all sensors
will have the same maximum value registered in
them and corresponding to the maximum on the
whole region (see the overall organization in Fig.
10).
Nodal(Level, Max, Region).
Frontal(Transfer).
Region = region definition.
Hop(all nodes, Region).
Loop(
Or parallel(
Loop(
Sleep(5).
Level = measure(pollution).
Stay(Level > Max. Max=Level).
Transfer = Max.
Hop(directly reachable,Region).
Transfer > Max. Max=Transfer),
sleep(120)).
Level == Max.
Transfer = Max & WHERE.
Repeat(hop(-infra)).
Transmit(Transfer))
As there may be many sensors located in the region
of interest, we will need forwarding only a single
copy of this resultant maximum value to a
transmitter for an output. This can be achieved by
delegating this task only to the sensor whose
measured local value is equal to the accumulated
maximum in it, which corresponds to the overall
region’s maximum.
Having discovered that it is the leader (after a
certain time delay), such a sensor organizes repeated
movement to the nearest transmitter via the earlier
created virtual infrastructure, carrying the resultant
maximum value in frontal variable Transfer, and
sending it outside the system in the transmitter
reached, as shown in Fig. 10.
Similar, fully distributed, organization may be
introduced for finding averaged values, or even for
assembling the global picture of the whole region
with any details collected by individual sensors (the
latter may be costly, however, with a more practical
solution skeleton shown in the next section).
S
S
S
S
S
S
S
S
Generalized
result
Local communications
S
Self-routing
to transmitter
Region of interest
Emergent
leader
node
Figure 10: Distributed averaging with active routing.
9 ASSEMBLING FULL PICTURE
OF THE REGION
To collect details from some region via local sensors
and merge them into the whole picture could, in
principle, be possible via local single-level
exchanges only, as in the previous section, but the
amount of communications and data transfer as well
as time needed may be unacceptably high. We were
finding only a single value (maximum) via frequent
internode communications, with minimal code
length.
But for obtaining the detailed global picture of
the region or of some distributed phenomenon, we
may have to gradually paint (grow) this picture in
every sensor node simultaneously, with high
communication intensity between the nodes. Also,
there may be difficult to determine the completeness
of this picture staying in local sensors only. A higher
integrity and hierarchical process structuring may be
needed to see a distributed picture via the dispersed
sensors with limited visual capabilities and casual
communications.
Different higher-level approaches can be
proposed and expressed in DSL for this. We will
show only a possible skeleton with spanning tree
coverage of the distributed phenomenon and
hierarchical collection, merging, and fusing partial
results into the global picture. The latter will be
forwarded to the nearest transmitter via the
previously created infrastructure (using links
infra), as in Fig. 11.
Hop(random, all nodes,
detected(phenomenon)).
Loop(
Frontal(Full) = fuse(
MAKING SENSOR NETWORKS INTELLIGENT
99

Repeat(
Free(collect(phenomenon));
Hop(directly reachable,
first come,
detected(phenomenon)))).
Repeat(hop(-infra)).
Transmit(Full))
In the more complex situations, which can be
effectively programmed in DSL too, we may have a
number of simultaneously existing phenomena,
which can intersect in a distributed space. We may
also face combined phenomena integrating features
of different ones. The phenomena (like flocks of
birds, manned or unmanned groups or armies,
spreading fire or flooding) covering certain regions
may change in size and shape, they may also move
as a whole preserving internal organization, etc.
In the previous language versions (Sapaty, 1999,
2005; Sapaty et al., 2006), a variety of complex
topological problems in computer networks were
investigated and successfully programmed in a fully
distributed and parallel manner, which included
connectivity, graph patterns matching, weak and
strong components like articulation points and
cliques, also diameter and radius, optimum routing
tables, etc., as well as topological self-recovery after
indiscriminate damages (Sapaty, 1999).
S
S
S
S
S
S
S
S
S
Full
picture
Initiator
Self-routing
to transmitter
Active space
coverage
Echoed
partial results
Figure 11: Space coverage with global picture fusion.
10 CONCLUSIONS
We have presented a universal and flexible approach
of how to convert distributed sensor networks with
limited resources in nodes and casual
communications into a universal spatial machine
capable of not only collecting and forwarding data
but also solving complex computational and logical
problems as well as making autonomous decisions in
distributed environments.
The approach is based on quite a different type
of high-level language allowing us to represent
system solutions in the form of integral seamless
spatial processes navigating and covering
distributed worlds at runtime. This makes parallel
and distributed application programs extremely short,
which may be especially useful for the energy
saving communications between sensors.
The code compactness and simplicity are
achieved because most of traditional synchronization
and data or agent exchanges (which are also on a
high level, with minimum code sent) are shifted to
efficient automatic implementation, allowing us
concentrate on global strategies and global solutions
instead.
REFERENCES
Chong, C.-Y., Kumar, S. P., 2003. Sensor networks:
Evolution, opportunities, and challenges. Proc. of the
IEEE, Vol. 91, No. 8, August, pp.1247-1256.
Culler, D., Estrin, D., Srivastava, M., 2004. Overview of
sensor networks, Computer, August, pp.41-49, publ.
by the IEEE Computer Society.
Sapaty, P. S., 1999. Mobile Processing in Distributed and
Open Environments, John Wiley & Sons, ISBN:
0471195723, New York, February, 436p.
(www.amazon.com).
Sapaty, P. S., 2005. Ruling Distributed Dynamic Worlds,
John Wiley & Sons, New York, May, 256p, ISBN 0-
471-65575-9 (www.amazon.com).
Sapaty, P., Sugisaka, M., Finkelstein, R., Delgado-Frias, J.,
Mirenkov, N., 2006. Advanced IT support of crisis
relief missions. Journal of Emergency Management,
Vol.4, No.4, ISSN 1543-5865, July/August, pp.29-36
(www.emergencyjournal.com).
Sapaty, P., Morozov, A., Finkelstein, R., Sugisaka, M.,
Lambert, D., 2007. A new concept of flexible
organization for distributed robotized systems. Proc.
Twelfth International Symposium on Artificial Life and
Robotics (AROB 12th’07), Beppu, Japan, Jan 25-27,
8p.
Wireless sensor network. Wikipedia, the free encyclopedia,
www.wikipedia.org.
Zhao, F., Guibas, L., 2004. Wireless Sensor Networks: An
Information Processing Approach (The Morgan
Kaufmann Series in Networking). Morgan Kaufmann,
376p.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
100
