
INTROSPECTION ON CONTROL-GROUNDED CAPABILITIES
A Task Allocation Study Case in Robot Soccer
Christian G. Quintero M., Salvador Ibarra M., Josep Ll. De la Rosa and Josep Vehí
University of Girona, Campus Montilivi, 17071, Girona, Catalonia, Spain
Keywords: Machine learning in control applications, Software agents for intelligent control systems, Mobile robots and
autonomous systems, Autonomous agents, Reasoning about action for intelligent robots.
Abstract: Our proposal is aimed at achieving reliable task allocation in physical multi-agent systems by means of
introspection on their dynamics. This new approach is beneficial as it improves the way agents can
coordinate with each other to perform the proposed tasks in a real cooperative environment. Introspection
aims at including reliable physical knowledge of the controlled systems in the agents’ decision-making. To
that end, introspection on control-grounded capabilities, inspired by the agent metaphor, are used in the task
utility/cost functions. Such control-grounded capabilities guarantee an appropriate agent-oriented
representation of the specifications and other relevant details encapsulated in every automatic controller of
the controlled systems. In particular, this proposal is demonstrated in the successful performing of tasks by
cooperative mobile robots in a simulated robot soccer environment. Experimental results and conclusions
are shown, stressing the relevance of this new approach in the sure and trustworthy attainment of allocated
tasks for improving multi-agent performance.
1 INTRODUCTION
In recent years, Artificial Intelligence (AI)
approaches have been combined with traditional
control theory to obtain intelligent systems. In this
sense, the advances of the AI community, together
with the new techniques in the control community,
have presented a fresh path for further progress
(Halang et al., 2005) (Murray et al., 2003). In
particular, complex control systems (Sanz et al.,
2003) have been managed using agents. Nowadays,
a complex control system is a distributed,
asynchronous and networked framework and the
whole process must be considered as a multi-agent
system that requires coordination and cooperation to
perform the proposed tasks (Luck et al., 2005)
(Stone and Veloso, 2000). Specifically, agent
technology helps to solve task allocation problems in
real control scenarios by means of its distributed and
cooperative problem-solving paradigm (Jennings
and Bussmann, 2003). However, these agents lack
appropriate reasoning on knowledge related to the
physical features of the controlled system (physical
knowledge mainly related to dynamics). In addition,
such relevant knowledge is not appropriately
reflected and communicated by the agents. These
lacks do not facilitate more suitable task allocation
by the agents in a multi-task scenario. Explicitly,
lack of appropriate reasoning on physical knowledge
results in a lower number of successful coordinated
tasks performed by agents. In fact, this lack is
currently a significant impediment to reducing
complexity and achieving appropriate levels of
control, coordination and autonomy in task
allocation problems (Murray et al., 2003). That is to
say, agents don’t reflect on their control-oriented
knowledge and this knowledge is not currently
properly taken into account in the utility/costs
functions used in the agents’ decision-making for
allocating tasks. Physical agents are particular
examples of controlled systems. In recent years,
mobile robots - one typical representation of
physical agents - have become progressively more
autonomous and cooperative. So we have used
mobile robots in this approach without loss of
general applicability. Such autonomous cooperating
robots must then have reliable self-knowledge if
they are to improve the task allocation performance
in a multi-robot environment. Specifically, this self-
knowledge must be based on an appropriate agent-
oriented representation of their automatic controllers
in the utility/cost functions used for allocating tasks.
With this representation, the physical agents can
consider their bodies in a better and more reliable
461
G. Quintero M. C., Ibarra M. S., Ll. De la Rosa J. and Vehí J. (2007).
INTROSPECTION ON CONTROL-GROUNDED CAPABILITIES - A Task Allocation Study Case in Robot Soccer.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 461-467
DOI: 10.5220/0001641504610467
Copyright
c
SciTePress

way, whenever it is necessary to allocate and
perform tasks in a multi-agent system. In this sense,
the paper proposes an introspection-based approach
to provide agents a cognitive ability for reasoning on
their physical knowledge, aiming at making
physically feasible task allocation to improve the
cooperative multi-agent performance.
2 RELATED WORK
Several authors (Goldberg and Matarić, 2000)
(Gerkey and Matarić, 2002) (Scheutz, 2002)
(Balakirsky and Lacaze, 2002) (Goldberg et al.,
2003) (Gerkey and Matarić, 2004) (Dahl et al.,
2004) (Lagoudakis et al., 2005) (Koenig et al.,
2006) (Sariel and Balch, 2006) (Ramos et al., 2006)
have studied the problems related to task allocation
in multi-robot environments based on utility/cost
functions. These approaches present suitable
approaches to task/action selection mainly take into
account domain knowledge in the agents’ decision-
making. However, an approach based on control-
oriented knowledge has not been completely carried
out. In this sense, we want to show how
introspection on the physical agents’ dynamics
contributes to a more suitable task allocation by
considering the physical agents’ bodies in a better
and more reliable way. Such consideration is
directly related to the automatic controllers of the
physical agents. Thus, reliable information is
extracted from the controllers to obtain appropriate
control-oriented knowledge of the physical agent’s
body. In this sense, such knowledge is represented
by means of specific attributes (control-grounded
capabilities) focused mainly on the physical agents’
dynamics.
3 OUR APPROACH
Before an agent starts a task, it should make a plan
for how to reach a given goal. This planning requires
the agent to have knowledge about the environment,
knowledge that can be represented in the agent’s
knowledge base. It is the agent’s ability to model its
own environment that makes it able to reason about
this environment, to plan its actions and to predict
the consequences of performing these actions.
However, much intelligent behavior seems to
involve an ability to model not only the agent’s
external environment but also itself and the agent’s
own reasoning. Such ability is called introspection
(Bolander, 2003).
Introspection is yet another aspect of human
reasoning in artificial intelligence systems (Wilson
et al., 2001). To have introspection in an artificial
intelligence system means that the system is able to
reflect on its own knowledge, reasoning, tasks and
planning (Bolander, 2003). For instance, before an
agent commits in the execution of a task, the agent
should register the fact of knowing if it can or
cannot perform the task, this needs introspection,
due to the agent has to look introspectively into its
own knowledge base and from it to arrive at a
suitable decision. In addition, in order to decide how
well the agent is doing or will do the proposed task,
an agent will also need this self-examination
capability (introspection) (McCarthy, 1999).
The agent is non-introspective when no
information in the knowledge base expresses facts
concerning the agent itself. Any non-introspective
agent only models its external environment.
Otherwise, introspective agents differ from non-
introspective ones by modelling not only their
external environment but also themselves. It is by
also have models of themselves they are given the
ability to introspect (Bolander, 2003).
In particular, introspection on the physical agents’
dynamics is a previously unexplored research area.
So we have focused our work just on this topic for
examining its impact in the performance of
cooperative multi-agent systems.
3.1 Introspection on the Physical
Agents’ Dynamics
Physical agents require a sense of themselves as
distinct and autonomous individuals able to interact
with others, i.e. they require an identity (Duffy,
2004). A complete concept of identity therefore
constitutes the set of internal and external attributes
associated with any given physical agent based on
introspection of its physical and “mental” states and
capabilities. In this work, the notion of internal and
external relates to the attributes of a physical agent
analogous to Shoham’s notion of capabilities in
multi-agent systems (Shoham, 1993). Thus, there are
two distinct attributes that are local and particular to
each physical agent within a cooperative system:
• Internal Attributes: beliefs, desires, intentions,
the physical agent’s knowledge of self, experiences,
a priori and learned knowledge.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
462

• External Attributes: the physical presence of the
agent in an environment; its actuator and preceptor
capabilities (e.g., automatic controllers) and their
physical features.
In particular, a subset of internal attributes
(control-grounded capabilities) is used to describe
the physical agents’ dynamics.
Introspection on physical agents’ dynamics refers
then to the self-examination by a physical agent of
the above capabilities to perform tasks. This self-
examination mainly considers the agent body’s
dynamics.
In this sense, an agent’s knowledge of its
attributes therefore allows a sufficient degree of
introspection to facilitate and maintain the
development of cooperative work between groups of
agent entities (Duffy, 2004). When an agent is
“aware” of itself, it can explicitly communicate
knowledge of self to others in a cooperative
environment to reach a goal. This makes
introspection particularly important in connection
with multi-agent systems.
In this context, physical agents must reach an
agreement in cooperative groups to obtain sure and
trustworthy task allocation. Sure and trustworthy
task allocation refers to an allocation accepted by the
agents only when they have a high certainty about
correctly performing the related tasks.
To achieve sure and trustworthy task allocations,
each physical agent must introspect, consider and
communicate their physical limitations before
performing the tasks. Without introspection,
physical agents would try to perform actions with no
sense, decreasing the number of successful tasks
performed by them.
3.2 Formalization Aspects
Let us to suppose that a physical agent A
α
is a part of
a cooperative group G. A cooperative group must
involve more than one physical agent. That is,
AAGAA|GA,A
jiji
⊆∧
≠
∈∃
Where AA is the set of all possible physical agents
in the environment. Let us to define the set of
control-grounded capabilities CC to represent the
physical agent’s dynamics as a subset of the internal
attributes IA of a physical agent A
α
such that:
)A(IA)A(CC
αα
⊆
A capability is part of the internal state of a
physical agent that must be useful to represent the
physical agent’s dynamics, must allow
computational treatment to be accessible and
understandable by agents and must be comparable
and combined with other capabilities to be exploited
as a decision tool by agents.
Let us to define the set of automatic controllers C,
whose actions provoke the physical agent’s
dynamics, as a subset of the external attributes EA of
a physical agent A
α
such that:
)A(EA)A(C
αα
⊆
The controllers allow and limit the tasks’
executions. So they are key at the moment physical
agents introspect on their control-grounded
capabilities to perform tasks.
Let us to consider the domain knowledge DK for
a physical agent A
α
made up of a set of
environmental conditions EC (e.g., agents’ locations,
targets’ locations), a set of available tasks to perform
T, and a set of tasks requirements TR (e.g., achieve
the target, avoid obstacles, time constraints, spatial
constraints,) as is described by (1).
)1()A(TR)A(T)A(EC)A(DK
αααα
∪∪
=
}tr,,tr,task,task,ec,,ec{)A(DK
q1p1o1
………
=
α
Each physical agent has associated a subset of
controllers for the execution of tasks of the same
kind such that:
)A(C)A(C),A(Ttask
k
taskk ααα
⊆
∃
∈
∀
All controllers involve in the same task has
associated the same kind on capabilities such that:
)A(CC)A(CC),A(Cc
kik
task,ctaski ααα
⊆
∃
∈
∀
The capabilities for a controller i in the
execution of a particular task k, are obtained, as in
(2), taking into account the agent’s domain
knowledge related to the proposed task such
that:
ki
task,c
CC
k
task
DK
)A(IA)A(CC)A(CC
ki
task,c ααα
⊆⊆
)A(DK)A(DK
k
task αα
⊆
|
)2())A(DK()A(CC
kkiki
tasktask,ctask,c αα
Ψ
=
INTROSPECTION ON CONTROL-GROUNDED CAPABILITIES - A Task Allocation Study Case in Robot Soccer
463

ki
task,c
Ψ
is a self-inspection function that allows
physical agents introspect on their capabilities using
the controller i for the task k.
A self-evaluation function uses the
capabilities in an appropriate way to allow physical
agents know a certainty index related to the
correct execution of the proposed task k using the
controller i as is described in (3).
ki
task,c
Φ
ki
task,c
ci
)3())A(CC()A(ci
kikiki
task,ctask,ctask,c αα
Φ=
The set of all certainty indexes for a specific task
k is constituted by all of the controllers in
this task:
ki
task,c
ci
)A(CI)A(ci),A(Cc
kkik
tasktask,ctaski ααα
⊆∃∈∀
Where
)A(CI)A(CI
k
task αα
⊆
CI constitutes the set of all certainty indexes
related to the available tasks T for the agent A
α
. A
certainty index provides physical agent a degree of
conviction concerning the truth of its knowledge and
ability to perform a particular task.
In summary, the functions (Ψ,Φ) provide physical
agents powerful tools for introspection-level
reasoning and suitable model of themselves.
Currently, there are several alternatives to
implement independently or jointly the above
functions. Thus, soft-computing techniques (e.g.,
neural networks, case-based reasoning and fuzzy
logic) and control techniques (e.g., model-predictive
control, multiple model adaptive controllers and
switching control systems) are commonly used.
3.3 Task Allocation Algorithm
There are several coordination parameters to take
into account in the utility/cost functions for
allocating tasks. Our approach considers jointly with
the introspection, the proximity and the trust.
The introspection parameter refers to
a comparative analysis between all possible certainty
indexes of the controllers in a specific task
that allows physical agent, if it is possible, to select a
controller for the execution of this task as is
described in (4).
)A(I
k
task α
k
task
CI
)4())A(CImax()A(I
kk
tasktask αα
=
]1,0[)A(I
k
task
∈
α
A high value represents that the agent
A
)A(I
k
task α
α
can perform the task k correctly. A low
value indicates that the agent cannot
perform the task.
)A(I
k
task α
Proximity represents the physical situation of each
agent in the environment. The proximity parameter
is related to the distance between the
current location of the agent A
)A(P
k
task α
α
and the location of
the target as is described in (5).
)5(max)d/)A(d1()A(P
kk
tasktask αα
−
=
]1,0[)A(P
k
task
∈
α
Where is the distance between the
physical agent A
)A(d
k
task α
α
and the target task
k
and dmax
establishes a fixed maximal radius limit according to
the target’s location.
Trust represents the social relationship among
physical agents that rule the interaction and behavior
of them. The trust parameter takes into
account the result of the past interactions of a
physical agent with others. The performance of the
proposed task is then evaluated based on
. Equation (6) shows the reinforcement
calculus if goals are correctly reached by the agent.
Otherwise, the agent is penalized if goals are not
reached using (7).
)A(T
k
task α
)A(T
k
task α
)6()A(A)A(T)A(T
kkk
tasktasktask ααα
Δ+
=
)7()A(P)A(T)A(T
kkk
tasktasktask ααα
Δ−
=
]1,0[)A(T
k
task
∈
α
Where
)A(A
k
task α
Δ
and are the
awards and punishments given to A
)A(P
k
task α
Δ
α
in the task k
respectively. A high value represents a
more trusted physical agent in the task.
)A(T
k
task α
The utility/cost function is therefore
constituted as a proper average of the element-by-
element multiplication of the tuples as in (8).
)A(U
k
task α
(
)
)8(
Ok
)A(PaOkTh
)A(U
k
kkk
k
task
tasktasktask
task
∑
∑
α
α
⋅⋅
=
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
464
Where is a tuple formed by the
coordination parameters such that:
)A(Pa
k
task α
)]A(T)A(P)A(I[Pa
kkkk
tasktasktasktask ααα
=
k
task
Th
is a set of flags (1 or 0) that establishes if the
above coordination parameters fulfill their respective
decision thresholds such that:
]th_Tth_Pth_I[Th
kkkk
tasktasktasktask
=
We have selected appropriate decision thresholds
to set or not the above flags.
k
task
Ok
is a set of flags (1 or 0) that establishes if the
above coordination parameters are currently taking
into account in the utility/cost function such that:
]ok_Tok_Pok_I[Ok
kkkk
tasktasktasktask
=
Thus, the tasks are allocated to physical agents
according to the value of their utility/cost functions
(see Equation 8).
4 CASE STUDY
We have used a simulated robot soccer environment
to evaluate our approach. Here, task allocation is
related to achieve targets with different time and
spatial constraints.
In particular, the environment is divided is several
scenes S = {scene
1
, scene
2
, scene
3
,…, scene
N
}, each
one with a specific set of tasks to allocate
. Here,
scenes refer to the spatial regions where agents must
meet and work jointly to perform the proposed tasks.
Physical agents are represented by nonholonomic
mobile robots. The robots have just one controller to
control its movements in the environment. These
physical agents must therefore coordinate their
moves to increase the system performance by means
of a suitable task allocation in each scene. At the
beginning of each simulation, the physical agents are
not moving. In addition, the agents’ locations are set
randomly in each simulation.
} task,, task, task,{task T
)M(scene321
j
…=
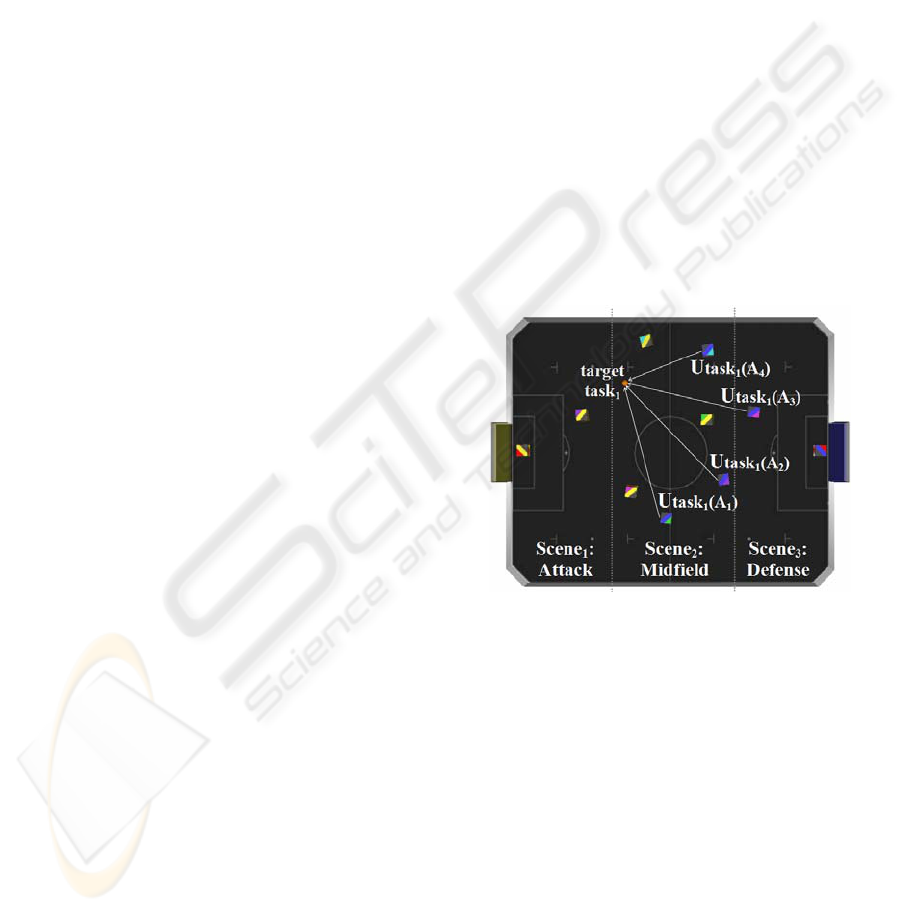
5 IMPLEMENTATION
In our implementation, we have designed a
heterogeneous team such that G = {A
1
, A
2
, A
3
, A
4
,
A
5
} where each agent has a different movement
controller such that: C(A
1
) = {c
1
}, C(A
2
) = {c
2
},
C(A
3
) = {c
3
}, C(A
4
) = {c
4
} and C(A
5
) = {c
5
}. There
are three scenes S = {attack, midfield, defense} in
the environment as is shown in Figure 1. The current
scene is established taking into account the current
ball’s location. For the sake of simplicity, the main
task to allocate is to kick the ball in each scene
toward the opposite goal. In this sense, for each
physical agent is calculated its utility/cost function
in the current scene. Such function
allows selecting the most suitable agent for that task
while the other remaining agents follow a fixed
strategy. Specifically, the introspection approach
was implemented by using feed-forward back-
propagation neural networks. Similarly, the awards
and punishments of the trust parameter are different
in each scene.
)A(U
k
task α
Figure 1: Robot soccer simulator environment.
6 EXPERIMENTAL RESULTS
We established empirical experiments featuring
simulated robot soccer tournaments to test system
performance when introspection on physical agents’
dynamics is used. Our tests used models of the
MiroSot robots simulator. The selected simulation
experiments consist of a predefined number of
championships (10), each one with a predefined
number of games (10). The performance is measured
as a ratio between the total points (won game: 3
points, tied game: 1 point) achieved by our team in
each championship and the all possible points (30)
in this championship where our team play versus a
INTROSPECTION ON CONTROL-GROUNDED CAPABILITIES - A Task Allocation Study Case in Robot Soccer
465
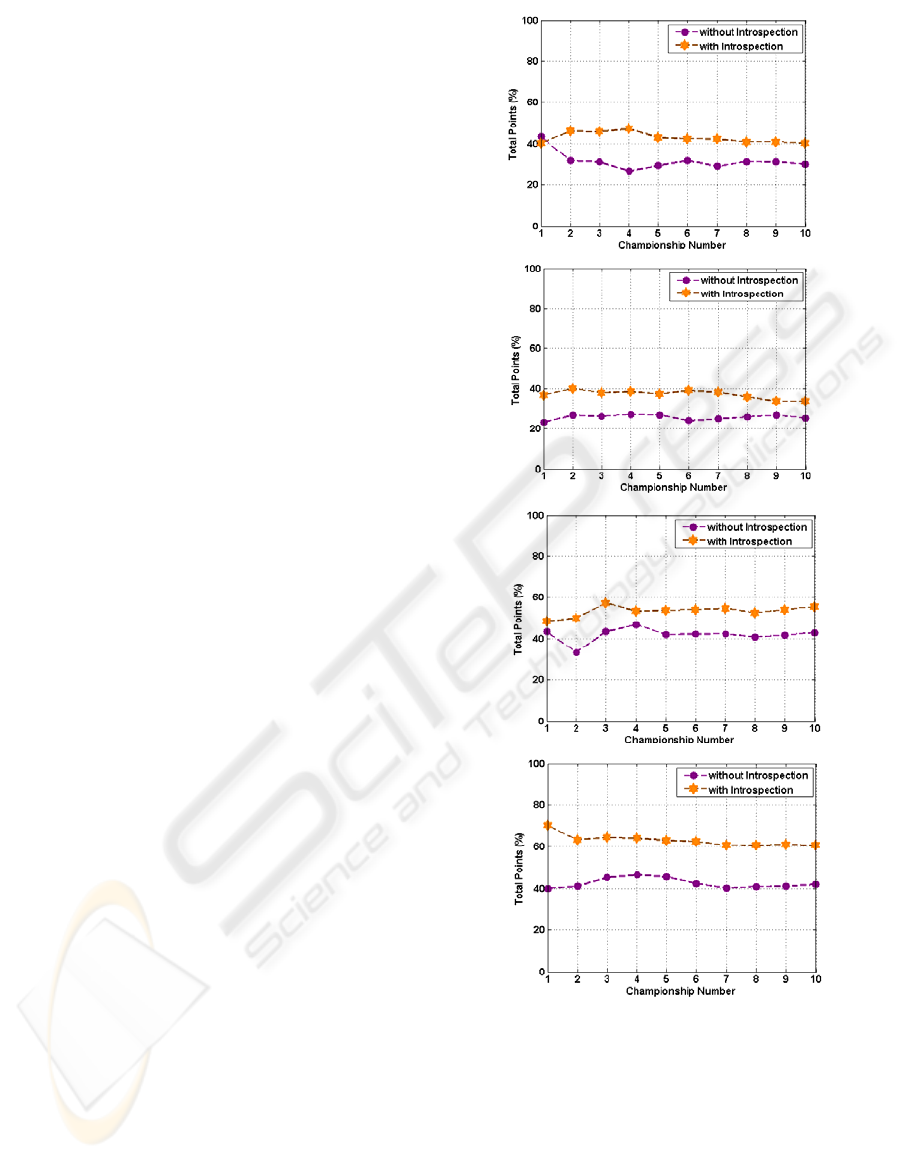
a
blind opponent robotic team. The initial state of each
physical agent was randomly set at every game.
We have compared the system performance
highlighting the influence of the introspection in the
decisions of our team. In particular, we compared
the following teams R vs. I, P vs. P + I, T vs. T + I
and P + T vs. P + T + I by modifying the set of flags
such that, e.g., for R and
for I, where R: random, I:
introspection, P: proximity and T: trust.
k
task
Ok ]000[Ok
k
task
=
]001[Ok
k
task
=
Figure 2 illustrates how the best system
performance is achieved by using introspection in all
cases. Here follows a preliminary conclusion: the
composition of any parameters with introspection
increase the performance as the result of most
suitable task allocation in the system. The system
performance always improves when the physical
agents take into account their physical capabilities
based on introspection. The figure also confirms that
successful decisions related to task allocation
increase when agents use introspection: agents can
make better decisions and can consequently make
more sure and trustworthy task allocations. In
addition, it should be noted that the improvement
rate of the introspection approach over the other
approaches is a result of the possibility of including
the misses in the agents’ decisions. In fact, this is an
advantage of introspection. Agents can discriminate
between the trials in which they have a chance of
successfully performing the tasks and those in which
they have no chance. In summary, all the above
results show that a good decision tool based on
introspective reasoning can increase the autonomy
and self-control of agents and obtain reliable
utility/costs functions in task allocation problems.
Introspection and decisions based on capabilities
give a trustworthy indication of the real reliability
with which each agent performs tasks in cooperative
systems.
7 CONCLUSIONS
We argue the need for introspective skills in relation
to control-oriented knowledge in physically
grounded agents to improve the physical agents’
decision-making performance in task allocation
problems. Introspection allows physical agents to
achieve sure and trustworthy task allocations in
cooperative systems, thereby improving the
performance of agents in a multi-task environment.
b
c
d
Figure 2: Performance comparison a) R vs. I, b). P vs. P +
I, c). T vs, T + I, d). P + T vs. P + T + I.
We considered a representation based on capabilities
related to the agent body’s dynamics. These
capabilities were managed in an introspective
manner when agents were required to select the most
suitable task to perform. Nevertheless, it is still
difficult to choose the necessary information to
include in the capabilities to represent control-
oriented knowledge. In spite of this, our
experimental results show that introspection on
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
466

control-oriented features helps physical agents to
make a reliable task allocation and to form sure,
achievable and physically grounded commitments
for these tasks. Here, introspection on control-
oriented features is closely related to the automatic
controllers of physical agents. From the controllers,
suitable information was extracted to obtain reliable
control-oriented knowledge of the physical agent’s
body. There is still much to explore about how to
take advantage of this approach. In the future, we
want to extend the contribution to other controlled
systems with a larger number of tasks, physical
agents, controllers and capabilities, as well as to
include introspection-based approaches in auction-
based methods for coordination. Furthermore,
selection of a paradigm for the implementation of
these concepts is not at all trivial, and its
development is still an open question.
ACKNOWLEDGEMENTS
This work was supported in part by the Grant
TIN2006-15111/ “Estudio sobre Arquitecturas de
Cooperación” from the Spanish government.
REFERENCES
Halang W., Sanz R., Babuska R. and Roth H., 2005.
“Information and Communication Technology
Embraces Control,” Status Report by the IFAC
Coordinating Committee on Computers, Cognition
and Communication.
Murray R., Astrom K.J., Boyd S., Brockett R.W. and Stein
G., 2003. “Future Directions in Control in an
Information-Rich World,” IEEE Control Systems
Magazine, vol. 23, no. 2, pp. 20-33.
Sanz R., Yela A. and Chinchilla R., 2003. “A Pattern
Schema for Complex Controllers”. IEEE Emergent
Technologies for Factory Automation (ETFA), pp.
101-105.
Luck M., McBurne P., Shehory O. and Willmott S., 2005.
“Agent Technology: Computing as Interaction,” A
Roadmap for Agent Based Computing, pp. 11-12.
Stone P. and Veloso M., 2000. “Multiagent Systems: A
Survey from a Machine Learning Perspective,”
Autonomous Robots, vol. 8, no. 3, pp. 345–383.
Jennings N.R. and Bussmann S., 2003. “Agent-Based
Control Systems. Why Are They Suited to
Engineering Complex Systems?” IEEE Control
Systems Magazine, vol. 23, no. 3, pp. 61-73.
Goldberg, D. and Matarić, M. J., 2000. “Robust Behavior-
Based Control for Distributed Multi-Robot Collection
Tasks”. Technical Report IRIS-00-387, USC Institute
for Robotics and Intelligent Systems.
Gerkey, B. P. and Matarić, M. J., 2002. “Sold!: Auction
Methods for Multi-robot Coordination”. IEEE
Transactions on Robotics and Automation, 18(5):758-
768.
Scheutz, M., 2002. “Affective Action Selection and
Behavior Arbitration for Autonomous Robots”. In
Proc. of IC-AI 02.
Balakirsky, S. and Lacaze, A., 2002. “Value-Driven
Behavior Generation for an Autonomous Mobile
Ground Robot”. In Proc. of the SPIE 16th Annual
International Symposium on Aerospace/Defense
Sensing, Simulation and Controls.
Goldberg, D., Cicirello, V., Dias, M. B., Simmons, R.,
Smith, S., and Stentz, A. T., 2003. “Market-based
Multi-robot Planning in a Distributed Layered
Architecture”. Proceedings from the 2003
International Workshop on Multi-Robot Systems, vol.
2, pp. 27-38.
Gerkey, B. P. and Matarić, M. J., 2004. “A Formal
Analysis and Taxonomy of Task Allocation in Multi-
robot Systems. Int. J. of Robotics Research, 23(9):939-
954.
Dahl, T. S., Matarić, M. J., and Sukhatme, G. S., 2004.
“Emergent Robot Differentiation for Distributed
Multi-Robot Task Allocation”. In Proc. of the 7
th
International Symposium on Distributed Autonomous
Robotic Systems (DARS), pages 191-200.
Lagoudakis, M. G., Markakis, E., Kempe, D., Keskinocak,
P., Kleywegt, A., Koenig, S., Tovey, C., Meyerson,
A., and Jain, S., 2005. “Auction-based Multi-robot
Routing”. In Proc. of Robotics: Science and Systems,
Cambridge, USA.
Koenig, S., Tovey, C., Lagoudakis, M., Markakis, V.,
Kempe, D., Keskinocak, P., Kleywegt, A., Meyerson,
A., and Jain, S., 2006. “The Power of Sequential
Single-Item Auctions for Agent Coordination”. In
Proc. of the Twenty-First National Conference on
Artificial Intelligence.
Sariel, S. and Balch, T, 2006. “Efficient Bids on Task
Allocation for Multi Robot Exploration”. In Proc. of
the 19th International FLAIRS Conference.
Ramos, N., Lima, P., and Sousa, J. M., 2006. “Robot
Behavior Coordination Based on Fuzzy Decision-
Making”. In Actas do Encontro Cientifico do
Robotica.
Bolander, T., 2003. “Logical Theories for Agent
Introspection”. Ph.D. thesis, Informatics and
Mathematical Modelling (IMM), Technical University
of Denmark.
Wilson R. A. and Keil F. C. (Eds.), 2001. “The MIT
Encyclopedia of the Cognitive Sciences”. Cambridge,
MA: The MIT Press, ISBN 0-262- 73144-4.
McCarthy, J., 1999. “Making Robots Conscious of Their
Mental States”. Machine Intelligence 15, Intelligent
Agents, St. Catherine's College, Oxford, pp.3-17.
Duffy, B. , 2004. “Robots Social Embodiment in
Autonomous Mobile Robotics”, Int.. Journal of
Advanced Robotic Systems, vol. 1, no. 3, pp. 155 –
170, ISSN 1729-8806.
Shoham, Y., 1993. “Agent-oriented programming”.
Artificial Intelligence, vol. 60, no. 1, pp. 51-92.
INTROSPECTION ON CONTROL-GROUNDED CAPABILITIES - A Task Allocation Study Case in Robot Soccer
467
