
ADAPTIVE CONTROL BY NEURO-FUZZY SYSTEM OF AN
OMNI-DIRECTIONAL WHEELCHAIR USING A TOUCH PANEL AS
HUMAN-FRIENDLY INTERFACE
Kazuhiko Terashima, Yoshiyuki Noda, Juan Urbano, Sou Kitamura and Takanori Miyoshi
Department of Production Systems Engineering, Toyohashi University of Technology
Hibarigaoka 1-1, Toyohashi, 441-8580, Japan
Hideo Kitagawa
Department of Electronic Control Engineering, Gifu National College of Technology
Kamimakuwa, Motosu, Gifu, 501-0495, Japan
Keywords:
Omni-directional wheelchair, power assistant, operability, human-machine interface.
Abstract:
For improving the operability of an omni-directional wheelchair provided with a power assist system, the
system must be able to adapt to the individual characteristics of the many different attendants that will use it.
For achieving this purpose, an innovative human-interface using a touch panel that provides easy input and
feedback information in real time of the operation of a power-assisted wheelchair was developed. The system
was tested experimentally with many different attendants and the results show that in addition to providing
a human friendly interface by using the touch panel system with monitor it can adapt successfully to the
particular habits of the attendants.
1 INTRODUCTION
In order to satisfy the demand for higher mobility,
designers have created new driving concepts such as
omni-directional movement which allows any com-
bination of forward, sideways, and rotational move-
ment, thus ensuring users much more freedom and
safety in wide or narrow spaces. A variety of
wheelchairs with different options and special add-on
features have been developed to meet a wide range
of needs (Wada and Asada, 1999)-(West and Asada,
1992).
In the author’s laboratory, a holonomic Omni-
directional Wheelchair (OMW) which can act as
an autonomous (Kitagawa et al., 2002) or semi-
autonomous (Kitagawa et al., 2001) omni-directional
wheelchair has been developed. Comfort has been a
subject of study in the case with and without the joy-
stick (Kitagawa et al., 2002), (Terashima et al., 2004).
For handicapped people or elderly people that
can use their arms freely, many power assisted
wheelchairs have been developed such as Seki (Seki
et al., 2005) and Frank Mobility Systems (FrankMo-
bilitySystems, 2002), for example. However, it is nec-
essary to consider that some elderly people or hand-
icapped people can not use their arms because they
are damaged or they are so weak. These people
needs the help of an attendant. Considering this back-
ground, a power assist system that helps attendants
to move a heavy load has been designed and devel-
oped in author’s laboratory (Kitagawa et al., 2004).
Application of power assist for supporting the atten-
dant of an omni-directional wheelchair is one of a
novel research. To the authors knowledge, no other
report about this topic has appeared yet. However,
there is some research about power system for omni-
directional vehicles, but it is related to carts (Maeda
et al., 2000), not to wheelchairs. Moreover, it still has
some problems in rotation and in occupant’s comfort
since this system was developed for a food tray carry
vehicle in a hospital.
However, there is a problem related to the operabil-
ity of the OMW. Due to the application of the power
assist system, operability of the OMW degrades, es-
pecially when the attendant tries to rotate in clockwise
(CW), or counter-clockwise (CCW) direction around
the center of gravity (CG) of the OMW. This problem
is generated from the fact that it is difficult to give the
human force exactly towards the target direction by
means of the handle attached to the wheelchair, hence
the movement of the OMW using conventional power
assist does not provide to the target exactly. Further-
25
Terashima K., Noda Y., Urbano J., Kitamura S., Miyoshi T. and Kitagawa H. (2007).
ADAPTIVE CONTROL BY NEURO-FUZZY SYSTEM OF AN OMNI-DIRECTIONAL WHEELCHAIR USING A TOUCH PANEL AS HUMAN-FRIENDLY
INTERFACE.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 25-32
DOI: 10.5220/0001648700250032
Copyright
c
SciTePress

Figure 1: Omni-directional wheelchair (OMW).
more, the sensor position to measure the force added
by human for power assist is different from the posi-
tion of the gravity center of the OMW, and therefore
the force generated by its difference must be compen-
sated.
It was impossible to find general rules to solve the
both problems stated in the above, but the relation-
ship was found by authors between lateral and ro-
tational movements. These relationships were used
as the base for constructing a fuzzy reasoning system
that helped to improve the operability of the OMW.
Nevertheless, when the system was tested by dif-
ferent attendants, it was found that a complete satis-
factory result was not obtained by every attendant. It
is because each person has its own tendencies and the
fuzzy inference system must be tuned to respond to
them. Tuning of the fuzzy inference system by trial
and error thus has been tried by authors’ group. How-
ever it is a time consuming and needs a lot of trials of
the attendants, then these can become tired and bored.
Thus, a better tuning method, a method that allows
tuning of the fuzzy inference system, is needed. It
can be obtained by adding Neural Networks (NN) to
the fuzzy inference system, obtaining what is known
as a neuro-fuzzy system. There is a lot of research
in this topic (Jang, 1993)-(Lin and Lee, 1991), being
the basic difference the kind of NN that is used in
combination with the fuzzy inference system.
Jang (Jang, 1993) developed ANFIS: Adaptive-
Network-based Fuzzy Inference Systems, a neuro-
fuzzy system in which the fuzzy inference system is
tuned by using the input data of the system.
The desired direction of motion of the attendant as
the teaching reference for the learning could be input
by just using the keyboard of the computer. However
keyboard input is not user-freindly. Furthermore, this
method does not provide feedback information to the
attendant in order to know how well he is accomplish-
ing the desired motion. Then, a human interface that
provides information to the attendant is desired. This
can be achieved by using a touch panel system with
monitor, which is a device that can be used as an input
and at the same time can show the resultant motion of
the OMW. The desired motion and the real motion
of the OMW are compared in order to obtain the dif-
ference, or error, that will be used for the training of
ANFIS, as explained in a previous paper (Terashima
et al., 2006).
In a previous paper (Terashima et al., 2006) by
the authors, the forwards-bacwards velocity was not
included in the ANFIS system of the OMW and
then a Reduction Multiplicative Factor (RMF) was
used for the improvement of the rotational motion
of the OMW when there was some interference of
the forwards-backwards velocity. By using the RMF
it was possible to achieve good operability in the
forwards-backwards motion, lateral motion and rota-
tional motion. However the results were not satisfac-
tory in the case of slanting motion. By including the
forwards-backwards velocity in the ANFIS system as
shown in Fig. 6, and with the use of the touch panel
for providing teaching reference for the learning, it
was possible to acomplish a general omni-directional
motion. Simulation and experimental results in the
case of diagonal motion are shown in Fig. 13 and Fig.
14.
Hence, in this paper, an innovative method for
improving the operability of a power assist omni-
directional wheelchair by using a touch panel with
neuro-fuzzy controller as a human interface is pro-
posed.
2 CONSTRUCTION OF OMW
USING A TOUCH PANEL AS
HUMAN INTERFACE
A holonomic omni-directional wheelchair (OMW)
using omni-wheels has been built by authors’ gropup,
as is described in (Kitagawa et al., 2002)-(Kitagawa
et al., 2001). Figure 1 shows an overview of the
OMW developein by authors’ group.
The OMW is able to move in any arbitrary direc-
tion without changing the direction of the wheels.
In this system, four omni-directional wheels are in-
dividually and simply driven by four motors. Each
wheel has passively driven free rollers at their circum-
ference. The wheel that rolls perpendicularly to the
direction of movement does not stop its movement
because of the passively driven free rollers. These
wheels thus allow movement that is holonomic and
omni-directional.
The OMW is also equipped with a handle and a six-
axis force sensor, as shown in Fig. 1, that allows the
OMW’s use in power-assist mode. The force that the
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
26
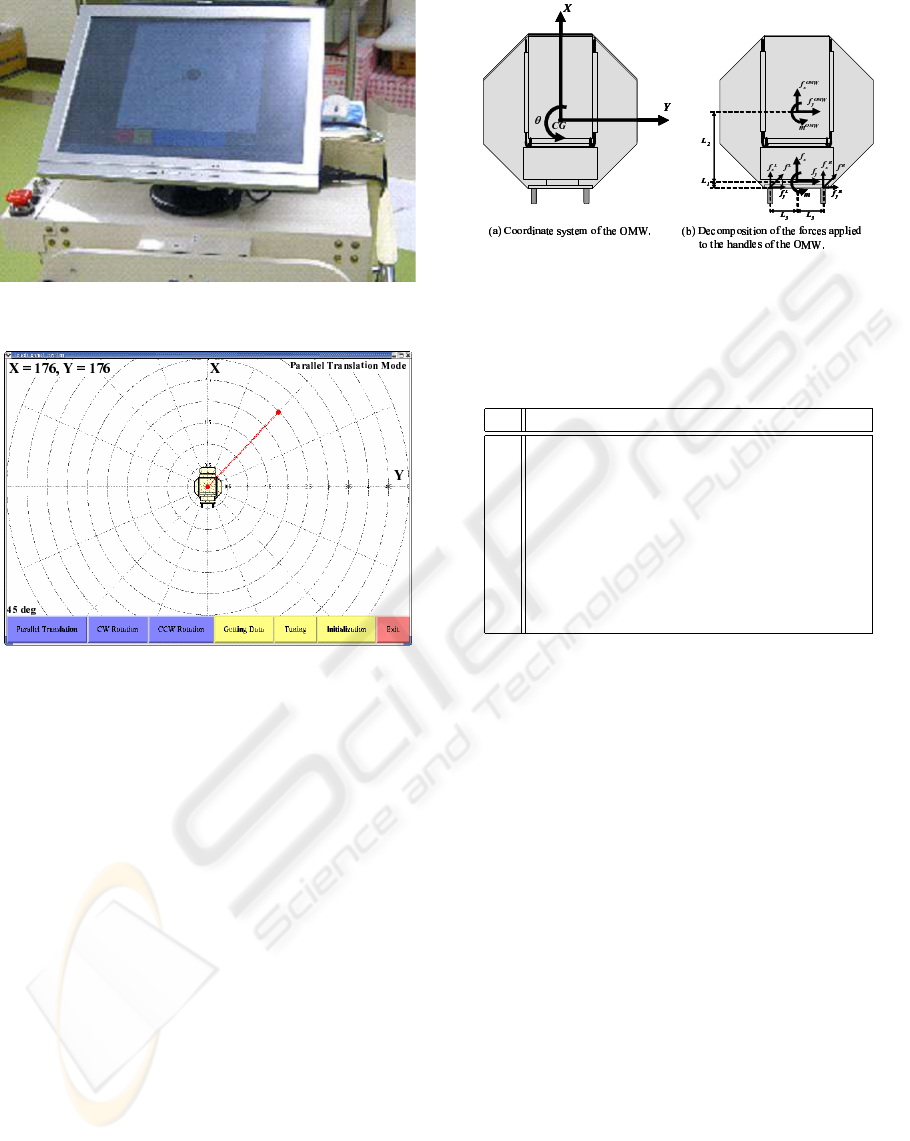
Figure 2: Touch panel used for the OMW.
Figure 3: GUI developed for the touch panel.
attendant inputs to the grips of the handle is measured
by this force sensor. Second order lag filter is used for
the transformation from force to velocity (Terashima
et al., 2006).
A touch panel is a display device that accepts user
input by means of a touch sensitive screen. Because
of their compact nature and ease-of-use, touch panels
are typically deployed for user interfaces in automa-
tion systems, such as high-end residential and indus-
trial control. Touch panels are also becoming com-
mon on portable computers such as Tablet PCs, Ultra-
Mobile PCs and consumer devices such as VOIP
phones. In this research, a touch panel as shown in
Fig. 2 is used as an input device in which the atten-
dant of the OMW draws the desired direction of mo-
tion. As shown in Fig. 2, the touch panel is mounted
in the rear part of the OMW such as the attendant can
reach to it easily. The touch panel used in this re-
search is a TFT Touch Monitor HV-141T produced by
ULTEC Corporation, Japan. A GUI (Graphical User
Interface) was developed for making easy the interac-
tion with the attendant, as show in Fig. 3. In this GUI
the attendant can draw any kind of motion, be it an
Figure 4: Working force.
Table 1: Fuzzy reasoning rules for lateral motion and rota-
tional motion.
R Antecedent Consequent
1 If V y < 0 and ω < 0, then ω < 0
2 If V y ≈ 0 and ω < 0, then ω < 0
3 If V y > 0 and ω < 0, then V y > 0
4 If V y < 0 and ω ≈ 0, then V y < 0
5 If V y ≈ 0 and ω ≈ 0, then 0
6 If V y > 0 and ω ≈ 0, then V y > 0
7 If V y < 0 and ω > 0, then V y < 0
8 If V y ≈ 0 and ω > 0, then ω > 0
9 If V y > 0 and ω > 0, then ω > 0
slanting motion, or a rotational movement.
3 NEURO-FUZZY SYSTEM FOR
IMPROVING OPERABILITY
When the user tries to rotate OMW around its grav-
ity center, OMW begins to slide and the radius of ro-
tation sometimes becomes very big. Then, rotation
around the center is very difficult (Kitagawa et al.,
2004). A survey was conducted among various at-
tendants trying to discover some relationships in the
way they realized forwards-backwards, lateral and ro-
tational movements. The goal of the survey was to
find general rules that related the three mentioned
motions. Even when it was impossible to find gen-
eral rules that explained all cases, a relationship was
found between lateral and rotational movements by
authors. These relationships were used as the base for
constructing a fuzzy reasoning system (MathWorks,
2002)-(Harris et al., 1993) that helped to improve the
operability of the OMW. In order to establish the rules
of direction inference, first, the force applied to the
grips of the force sensor are changed to the center of
OMW, as shown in Fig. 4. It is easy to derive a ba-
ADAPTIVE CONTROL BY NEURO-FUZZY SYSTEM OF AN OMNI-DIRECTIONAL WHEELCHAIR USING A
TOUCH PANEL AS HUMAN-FRIENDLY INTERFACE
27

Table 2: Fuzzy rules for the change of V x in order to im-
prove operability.
R Antecedent Consequent
1 If V x < 0 and V y < 0, then V x < 0
2 If V x ≈ 0 and V y < 0, then V x ≈ 0
3 If V x > 0 and V y < 0, then V x > 0
4 If V x < 0 and V y ≈ 0, then V x < 0
5 If V x ≈ 0 and V y ≈ 0, then 0
6 If V x > 0 and V y ≈ 0, then V x > 0
7 If V x < 0 and V y > 0, then V x < 0
8 If V x ≈ 0 and V y > 0, then V x ≈ 0
9 If V x > 0 and V y > 0, then V x > 0
6axis force
sensor
2nd-order
lag filter
f
R
f
L
f
x
f
y
m
v
x
v
y
d
d
v
y
d
directional
reasoning
v
x
Figure 5: Block diagram of the power assist system.
Figure 6: Contents of the block ”directional reasoning”.
sic equation to compensate the difference between the
sensor and the actuators allocation (Kitagawa et al.,
2004). However, it is difficult to exactly give the force
for the sensor to the target direction. Further, how to
give the force for the gripper sensor is slightly dif-
ferent depending on persons even for the same target
motion of the OMW. The rules of direction inference,
in which just lateral motion and rotational motion are
considered, are shown in Table 1. In Table 1, V y rep-
resents the lateral velocity of the OMW, and ω repre-
sents the angular velocity of the OMW. The forwards
and backwards velocity of the OMW is given by V x.
The system in which fuzzy reasoning was applied
just to the lateral and rotational velocity was tested,
and it was found that even when the operability in
lateral direction was improved, there were still some
problems with the rotational movement because of a
component V x that did not allowed to achieved a per-
fect rotation over the center of gravity of the OMW.
A Reduction Multiplicative Factor (RMF) which de-
creases the value of V x in the case of rotational mo-
Figure 7: Results when fuzzy reasoning is not applied for
improving operability.
Figure 8: Results when fuzzy reasoning is used by
”Attendant 1”.
tion, and keeps it unchanged in the case of forwards-
backwards movement was the solution provided by
authors in previous research (Terashima et al., 2006).
By using the RMF it was possible to improve the
forwards-backwards motion, lateral motion and rota-
tional motion over the gravity center of the OMW.
However, as V y was subjected to fuzzy reasoning
and V x was not, it was not possible to achieve good
operability for slanting motions, like diagonal motion.
In the case of diagonal motion, for example, the at-
tendant tries to move the OMW in such a way that
the inputs of V x and V y are almost the same in the
beginnig. Nevertheless, as V y is subjected to direc-
tional reasoning, its value changes. V x is not sub-
jected to directional reasoning, then its value remains
always the same. As a consequence, it is not possible
to achieve good operability in diagonal motion.
For solving this problem, V x was subjected to di-
rectional reasoning too using the fuzzy rules shown
in Table 2. This rules make it possible to include V x
in the fuzzy reasoning system without disturbing the
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
28
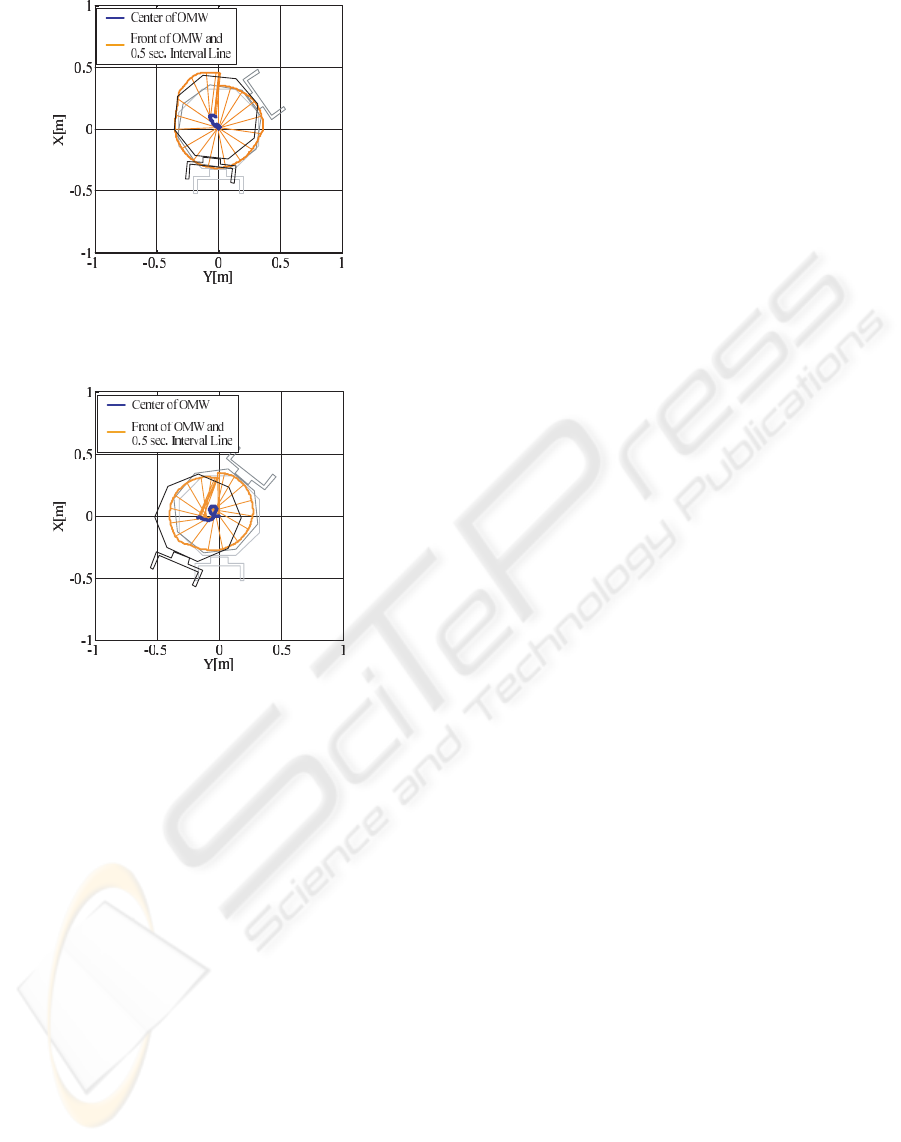
Figure 9: Results when fuzzy reasoning is used by
”Attendant 2”.
Figure 10: Results when fuzzy reasoning is used by
”Attendant 3”.
values of V y or ω. The block diagram of the sys-
tem that considers power assist and fuzzy reasoning
is shown in Fig. 5, and the contents of the block la-
beled as ”directional reasoning” are shown in Fig. 6.
By including V x in the ANFIS system it was possible
to acomplish a general omni-directional motion.
Fig. 7 shows the results in the case of a counter-
clockwise rotational over the center of gravity of the
OMW when no fuzzy reasoning is used. It is possi-
ble to see that there is a deviation in the lateral di-
rection as well as in the forwards-backwards direc-
tion. For solving this problem, the fuzzy system was
used. It was tuned by trial and error, as explained
in (Kitagawa et al., 2004), for an attendant that will
be called ”Attendant 1”, and the results, presented in
Fig. 8 shows that the rotational movement was im-
proved considerably. However, when the same system
was tested with two more different attendants, called
”Attendant 2” and ”Attendant 3”, the results were not
as good as in the case of ”Attendant 1”, as shown in
Fig. 9 and Fig. 10. It means that the system must be
tuned in order to respond to the individual character-
istics of the different attendants. However, the tuning
by trial and error is time consuming and boring for
the attendant. For that reason, the automatic tuning
of the system by using a neuro-fuzzy system, ANFIS
(Adaptive-Neural Fuzzy Inference System) was pro-
posed and developed as described in (Terashima et al.,
2006). The ANFIS system of the OMW provided in
this paper is shown in Fig. 11.
4 ADAPTIVE CONTROL WITH
HUMAN INTERFACE AND
RESULTS
In previous research (Terashima et al., 2006), the de-
sired direction of motion of the attendant was input
by using the keyboard of the computer of the OMW.
However, the attendant could not get a clear idea of
the direction in which he wanted to move, neither ver-
ify if the real motion of the OMW really corresponded
to his desire. In order to provide the attendant with an
easy way for inputing the desired direction of motion
and for verifying the direction of motion, a human in-
terface consisting of touch panel, as shown in Fig. 2
is used. A GUI (Graphical User Interface) was de-
veloped for making easy the interaction with the at-
tendant, as shown in Fig. 3. In this GUI the atten-
dant can draw any kind of motion, like, for example,
an slanting motion, or a rotational movement. More-
over, it allows the attendat to follow the motion of the
OMW in the screen of the touch panel, and compare
the difference between the desired motion and the real
motion of the OMW. The complete system, when the
touch panel is included, is shown in Fig. 12.
The procedure for applying the touch panel is as
follows:
1. First, the attendant draws in the touch panel the
kind of movement that he desires to accomplish,
as teaching signal for the learning of Neural Net-
works.
2. Then, the attendant moves the OMW trying to ac-
complish the desired motion.
3. However, in the general case, there as a differ-
ence between the desired motion and the real mo-
tion. This difference is used for the training of
the ANFIS system of the OMW, as explained in
(Terashima et al., 2006).
This system was used for supporting the operation
of the attendant in many kinds of movements. Like
for example forwards-backwards motion, lateral mo-
tion, rotational over the gravity center of the OMW in
clockwise and counter-clockwise direction, and many
cases of slanting motion. In Fig. 13 it is possible
ADAPTIVE CONTROL BY NEURO-FUZZY SYSTEM OF AN OMNI-DIRECTIONAL WHEELCHAIR USING A
TOUCH PANEL AS HUMAN-FRIENDLY INTERFACE
29

to observe the simulation results of one attendant for
the case of diagonal movement to the upper right cor-
ner of the XY system shown. Fig. 13 (a) shows the
diagonal trajectory obtained before tuning is accom-
plished. It is possible to see that it is more an arc than
an straight diagonal line. By using the same input
data used in Fig. 13 (a), the system is tuned by using
ANFIS, and the trajectory obtained after the tuning
is shown in Fig. 13 (b). It can be observed that the
trajectory has been improved, as expected. The num-
ber of data used for the training of the ANFIS was in
the range of 3500 ∼ 4000 data, and the learning time
was around 30 [s] ∼ 40 [s] in a Pentimum III 1 [GHz]
personal computer. The system was tested by exper-
iment, for the same attendant, with the results shown
in Fig. 14 (a) for the case before tuning, and Fig. 14
(b) for the case after tuning. As in the case of the sim-
ulation, the trajectory obtained in the experiments is
not so good before tuning, but it was improved after
the tuning of the ANFIS system of the OMW.
5 CONCLUSIONS
An innovative human-interface using a touch panel
that provides easy input and feedback information
in real time of the operation of a power-assisted
wheelchair was developed. Furthermore, adaptive
control using a neuro-fuzzy system was proposed in a
human friendly fashion by means of a touch panel as
a human-interface for improving the operability of the
wheelchair. The system was tested by simulation and
experiments, and its efectiveness was demonstrated.
ACKNOWLEDGEMENTS
This work was partially supported by The 21
st
Cen-
tury COE (Center of Excellence) Program ”Intelligent
Human Sensing”
REFERENCES
FrankMobilitySystems (2002). Frank mobility systems inc.
In http://www.frankmobility.com/.
Harris, C. J. et al. (1993). Intelligent control. World Scien-
tific.
Jang, J. (1993). Anfis: Adaptive-network-based fuzzy infer-
ence system. In IEEE Transactions on Systems, Man,
and Cybernetics, Vol. 23(3), pp. 665-685.
Kitagawa, H. et al. (2001). Semi-autonomous obstacle
avoidance of omnidirectional wheelchair by joystick
impedance control. In Proc. IEEE/RSJ Int. Symp. on
Intelligent Robots and Systems, pp. 2148-2153.
Kitagawa, H. et al. (2002). Motion control of omnidi-
rectional wheelchair considering patient comfort. In
Proc. IFAC World Congress, T-Tu-E20.
Kitagawa, H. et al. (2004). Fuzzy power assist control
system for omni-directional transport wheelchair. In
Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and
SystemsC1580-1585.
Lin, C. T. and Lee, C. S. G. (1991). Neural-network-based
fuzzy logic control and decision system. In IEEE
Trans. on Computers, Vol. 40(12), pp. 1321-1336.
Maeda, H. et al. (2000). Development of omni-directional
cart with power assist system (in japanese). In Proc.
18th Annual Conf. of Robotics Society of Japan, 15,
pp.1155-1156.
MathWorks (2002). Fuzzy logic toolbox user’s guide ver-
sion 2, pp. 3-18. The Matworks Inc.
Seki, H. et al. (2005). Novel driving control of power as-
sisted wheelchair based on minimum jerk trajectory.
In IEEJ Trans. EIS Vol. 125(7) (in Japanese), pp. 1133
- 1139.
Terashima, K. et al. (2004). Frequency shape control of
omni-directional wheelchair to increase user’s com-
fort. In Proceedings of the 2004 IEEE International
Conference on Robotics and Automation (ICRA), pp.
3119-3124.
Terashima, K. et al. (2006). Enhancement of maneuver-
ability of a power assist omni-directional wheelchair
by application of neuro-fuzzy control. In Proceedings
of the 3
nd
International Conference on Informatics in
Control Robotics and Automation (ICINCO 2006), pp.
67-75.
Wada, M. and Asada, H. (1999). Design and control of a
variable footprint mechanism for holonomic omnidi-
rectional vehicles and its application to wheelchairs.
In Proc. IEEE Trans. Robot. Automat, 15, pp. 978-
989.
West, M. and Asada, H. (1992). Design of a holonomic om-
nidirectional vehicle. In Proc. IEEE Int. Conf. Robot.
Automat., pp. 97-103.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
30
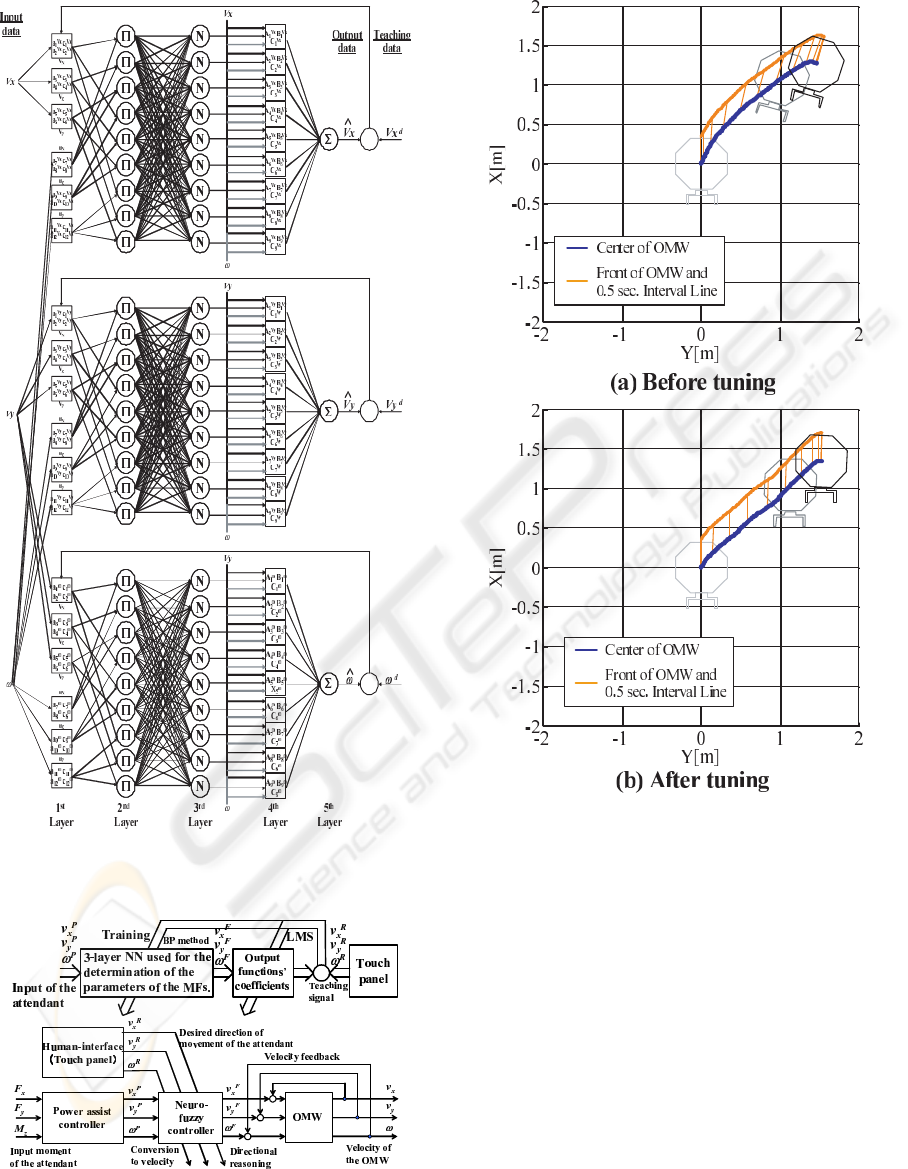
Figure 11: ANFIS systems of the OMW.
Figure 12: Complete system when the touch panel is in-
cluded.
Figure 13: Simulation results for one attendant in the case
of diagonal movemement to the right.
ADAPTIVE CONTROL BY NEURO-FUZZY SYSTEM OF AN OMNI-DIRECTIONAL WHEELCHAIR USING A
TOUCH PANEL AS HUMAN-FRIENDLY INTERFACE
31
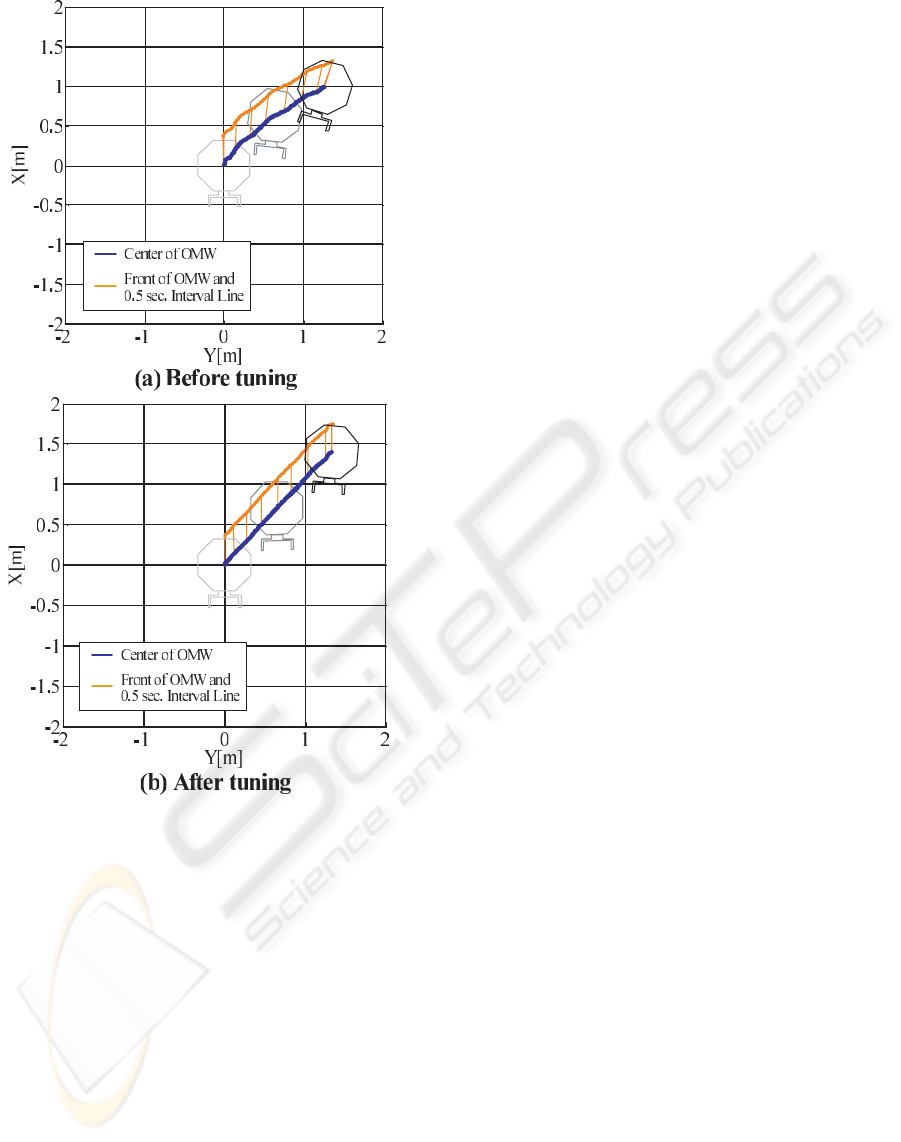
Figure 14: Experimental results for one attendant in the case
of diagonal movemement to the right.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
32
