
PROPERTY SERVICE ARCHITECTURE FOR DISTRIBUTED
ROBOTIC AND SENSOR SYSTEMS
Antti Tikanmäki and Juha Röning
Computer Engineering laboratory, University of Oulu, antti.tikanmaki@ee.oulu.fi, jjr@ee.oulu.fi
Keywords: Distributed robots and systems, multi-robot systems, sensor networks, Property Service architecture.
Abstract: This paper presents a general architecture for creating complex distributed software systems, called Property
Service architecture. The system may contain resources like robots, sensors, and different kinds of system
services, such as controller units, data storages, or a collective model of the environment. This architecture
contains several solutions and distributed system design methods for developing advanced and complex
systems. It also provides the possibility to add new resources to the system easily and during operation.
Each service has a very simple generalized interface. This meets the requirements of distributed robotic
applications, such as remote operation, multi-robot cooperation, and the robot's internal operation. The
simplicity of the interface also provides a possibility to scale down the service even on the low-cost, low-
performance microcontrollers used in small-sized robots. The main features of the architecture are the
dynamic properties of the resources, automatic reconfiguration, and the high level of reusability of the
implemented methods and algorithms.
1 INTRODUCTION
Creating a distributed system from several kinds of
devices and functionalities is a very demanding task.
Since, for example, a robot may contain many
different kinds of functionalities, actuators, and
sensors, the process of controlling is complex and
the interface becomes very complex. Different
systems cannot communicate with each other if there
is no single commonly used communication
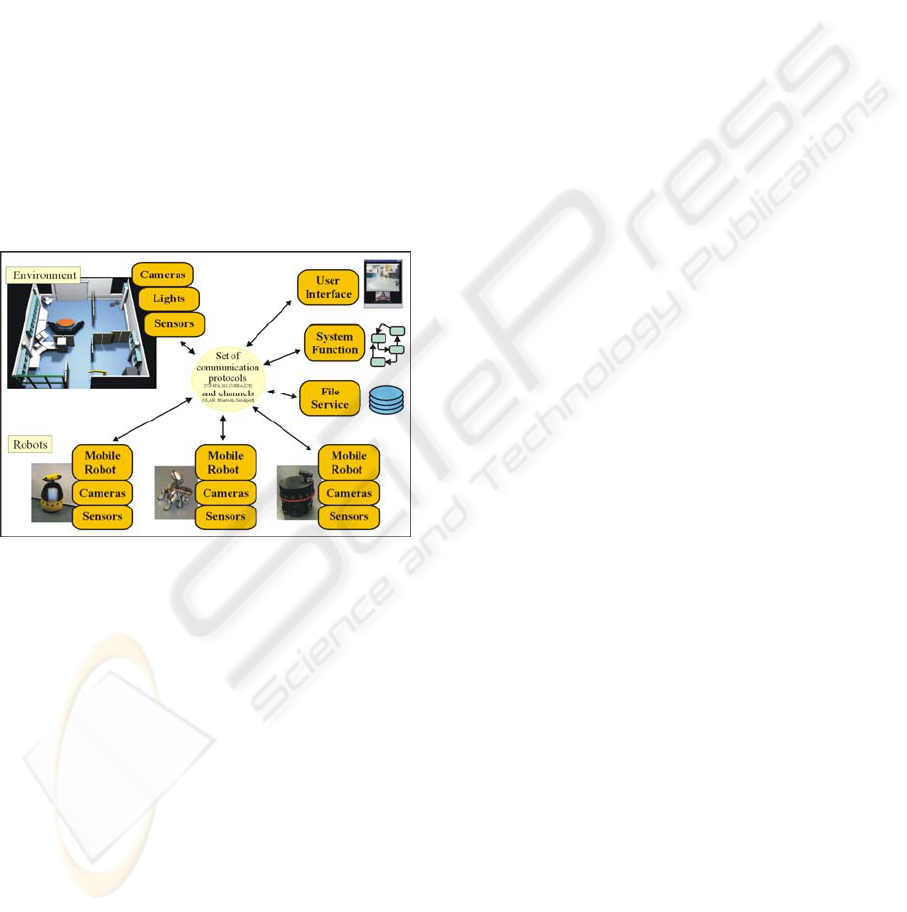
standard. Figure 1 shows an example of a set of
resources that a distributed system might have. The
operating environment might have several sensors,
lights and cameras. Different robots might need to
be used, some of them might be legged, and they
might contain several kinds of sensors. The human
operator has a graphical user interface where tasks
can be selected, and the system might have several
automatic functionalities. Each device is used in
different ways, and they can communicate in
different ways. The lighting of the room is
connected to a special control protocol, room
cameras can be controlled using a serial port, and
mobile robots use a wireless LAN. As the number of
resources in the system increases, for example when
a new kind of robot is developed to the system, the
process of maintaining and updating the interfaces
becomes very challenging.
For heterogeneous devices that take part in a
larger system, a common problem is how to define
an interface for each service in the system. This
becomes even harder in multi-robot systems, where
different kinds of robots with different capabilities.
As the system improves, the interface must be
changed and the whole system must be recompiled.
In real world applications when the
communication channel between robots also
unreliable, a common solution is to reduce
communication and increase autonomous
functionalities. Instead of sending drive commands
to a robot, a target of movement is delivered to the
robot. Increasing the capabilities of the robot leads
to an increase in features that must be accessible
through the interface. This sets either dynamic
requirements for the interface or a need for
continuous updating of interfaces.
To be able to achieve inter operation of a
versatile set of robots and devices, very simple but
flexible middleware is needed. The main
requirement for the middleware is that it is possible
to scale down to small-sized devices with a very
limited set of capabilities. On the other hand, it must
be able to provide an interface to varying features of
resources in the system and expand as new resources
226
Tikanmäki A. and Röning J. (2007).
PROPERTY SERVICE ARCHITECTURE FOR DISTRIBUTED ROBOTIC AND SENSOR SYSTEMS.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 226-233
DOI: 10.5220/0001650002260233
Copyright
c
SciTePress
are added to the system. This paper proves that it is
possible to implement flexible application layer that
can be implemented on all kinds of transportation
layers while providing all the capabilities of state-of-
the-art distributed architectures.
Our solution, called Property Service
architecture, has been developed to be a generalized
interface for all kinds of devices or resources in a
distributed system. Property Service provides the
possibility to easily create and add new resources to
a distributed system. The main criteria for the
architecture design were simplicity, scalability,
dynamics and expandability, and high reusability of
system components. Dynamics and expandability
make it possible to add new features and
functionalities to services even during operation, as
well as to integrate the results of different research
topics into a larger system. This is essential to be
able to build robotic systems with multiple
capabilities.
Figure 1: Set of resources that might be a part of a
distributed system.
This paper describes the whole architecture that
has been partly introduced on several papers
previously. It will describe system-level services that
improve the creation and management of distributed
systems and heterogeneous multi-robot systems.
2 RELATED WORK
Many efforts have been made to create a more
generally useful interface for networked robots. In
many cases, communication is based on commonly
used technologies like TCP/IP protocols and
middleware like CORBA, Soap, etc. In multi robot
architectures, several of these are based on CORBA
or a real-time CORBA (OMG, 2002) extension.
Examples of robotic architectures using RT-CORBA
are Mobility software (Rea, 1999), the Player/Stage
project (Gerkev et. al. 2003), Miro (Utz et. al. 2002)
and ORCA (Brooks 2005), which is based on a
CORBA component model. Later in ORCA2,
CORBA has been replaced with Ice (Hemming,
2004) middleware, which provides improved
features compared with CORBA
Wang et al. presented a COM-based architecture for
the fusion of logical sensors (Wang et al. 2001).
However their approach has some drawbacks,
including platform dependency and a lack of
network transparency. DDX architecture (Corke
2004) for a distributed system has been developed
using UDP/IP to transfer data from remote sensors
to a central data store. However their support for
only lower-level data structures increase the amount
of data transferred during operation and lacks
expandability.
Algorithms and remote control code on
heterogeneous robotics systems have also been
developed with higher reusability in mind.
CARMEN (Montemerlo, 2003) uses IPC to
communicate between system components and
provides a reusable navigation toolkit for multiple
robotics. URBI (URBI www) scripting language
support several kinds of robots and robot simulators.
URBI also provides client/server-type networking
for remote control of robots, in-language parallel
processing and support for several commercial
mobile robots.
Even though several possible solutions exist
already, they have several disadvantages. Relying on
a single communication protocol or middleware
limits the possible platforms on which the service
can run. As new features are added to the resource
(e.g. a robot or sensor), the interface must be
modified, which causes system-wide changes in the
remote software that uses the interface. General
middleware also requires a lot from the CPU,
memory, and disc space, and it cannot be run on
robots with an embedded CPU.
3 PROPERTY SERVICE
Property Service architecture provides tools for
building new networked systems in just a few hours.
It provides standardized data types and service types
that can operate on different kinds of platforms.
Property Service has been successfully used for
remote operation of mobile robots (Tikanmäki,
2003), multi-robot cooperation (Mäenpää et al.
2004), remote operation of a swarm of robots
(Tikanmäki, 2004), and to create a dynamic interface
PROPERTY SERVICE ARCHITECTURE FOR DISTRIBUTED ROBOTIC AND SENSOR SYSTEMS
227
for a modular robot (Tikanmäki and Vallius 2004).
This paper presents the complete architecture and
several system services, such as a storage service, a
resource service, and grouping services, and
explains how they can be used to build more
complex distributed systems containing robots and
other devices and system resources.
Properties are the features of each service, such
as the sensors of a robot, or they are functional
properties related to the operation of the service.
Functional properties include, for example, the
autonomous features of robots; or the tracking
capabilities of a sensing device. Each property is a
paired name and value and it can be set or requested.
The value of each property is transferred as
character arrays through a communication channel,
and structured data is represented in XML format.
Each service has a special property called
"properties", which contains a list of the properties
currently available on the service. The value of
“properties” changes during operation as the set of
properties of the service changes, providing dynamic
interface functionality.
Some properties may contain sub-properties.
This hierarchic representation provides the
possibility to request complex representations or, on
the other hand, only special features of a property.
The format is the same as that used in several
programming languages for separating fields of
structures. For example, by requesting the "location"
property from a robot service, the client receives a
6D vector of the current location of the robot. The
client can also request the "location.x" property,
which returns only the x coordinate of the robot's
current location.
A request for certain properties may also contain
some parameters that specify, for example, the
context of the return value. A good example of this
is a request for robot’s location, which might be
requested in several coordinate systems. The client
can request possible parameters using the
“.parameters” extension on property name.
3.1 Service Interface
Property Service has a simple interface, which
contains only two methods, "SET" and "GET", for
getting and setting the properties of a service. For
example, a connected client can GET the velocity of
a robot through Property Service or SET the velocity
of the robot. The terms client and server are
misleading, as both the client side and the server
side implement the Property Service interface. The
term 'client service' is used when talking about user
interfaces or other services that request properties
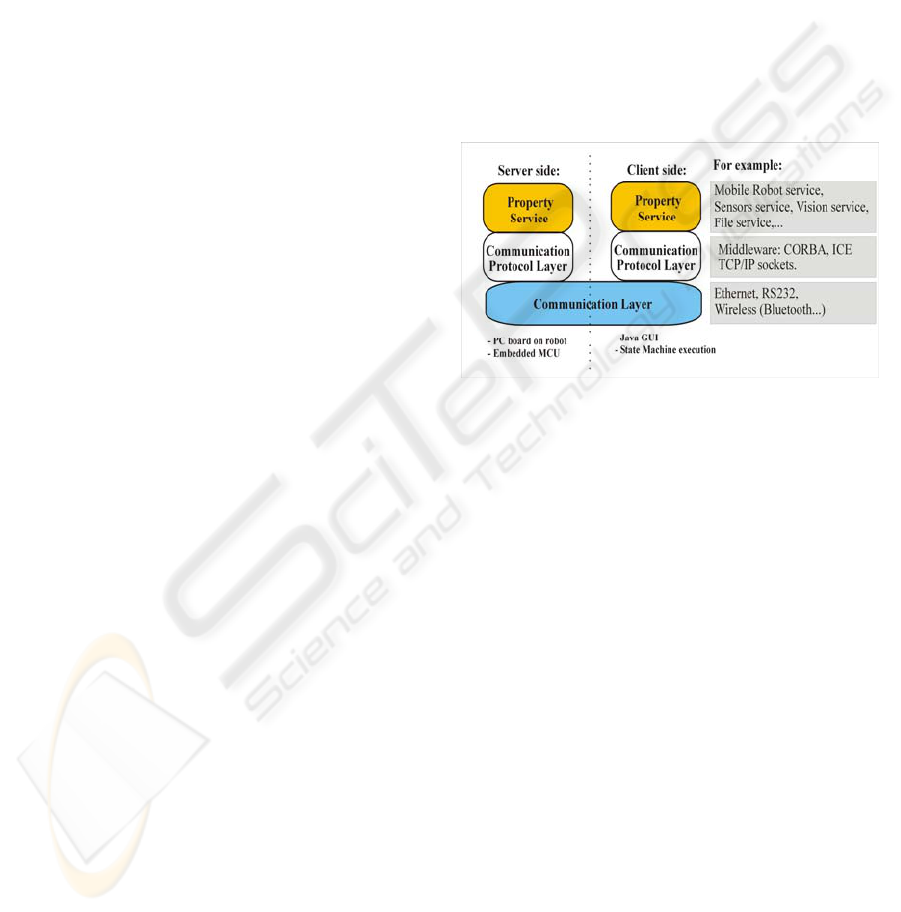
from other services. Figure 2 shows the general
principle of the architecture. In the Property Service
architecture, user interface components can be
thought of as a sensor that senses user inputs and
provides these as properties. Therefore, the user
interface can have properties that other services can
set or get. This feature is used in the listening
mechanism. A client service can request listening of
a certain property of the other service. This service
registers information concerning the connection of
the client service to the requested property. Each
time the value of the property changes in the service,
an event is sent to the client service. The main
advantage of this is that the client service does not
need to continuously request value changes, thus
reducing the amount of required communication.
This is especially useful when changes in the
property value occur over a long period.
Figure 2: Principle and examples of property service
layers.
3.2 Data Types
Property Service has a simple interface, which
Several commonly used data types have been
standardized to provide compatibility between
services. The most commonly used ones are vector,
list and markers. These data types are briefly
introduced in the following.
A vector is an array of decimal numbers and its
length can vary. For example, a request for a robot's
location returns a 6-dimensional vector containing x,
y, and z translations and a, b, and c rotations along
each axis. A vector is also used to deliver
measurements from various sensors, like distance
sensors. A vector is also used to represent
sequences, histograms, etc.
A list is a set of data types. It is used, for
example, to list the properties that a service has. A
list can wrap several kinds of data types, including a
robot's path, which is presented as a list of locations
(presented as vector types). The shape of an edge of
an object can also be presented as a list of vectors
containing image coordinates.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
228
A marker is a structure that stores information
about detected and tracked objects in the
environment. For example, a robot's vision system
provides markers for objects currently in the field of
view. The marker structure contains location
information and a set of detected features that the
object has. For example, a ball recognized from the
camera view can have recognized features like shape
and color. Markers provided by different services
can be collected into a model that represents current
knowledge about the current environment. This
provides the possibility to easily build sensor
networks and swarm robotic systems.
Markers are used as input parameters for the
behaviors of various services. In addition to physical
objects they can also represent abstract entities that
can be used to create new behaviors. For example, a
target marker for a "move to" behavior that stays in
front of a robot causes the robot to move forward.
The measurements of each sensor can be presented
as markers, which is highly useful in creating
distributed sensing systems. For example, a swarm
of robots produces a large amount of markers of the
objects they detect. These markers are collected into
one place to create an environmental model based on
where the swarm operates.
Table I shows an example of each of the basic
data types. As it can be seen, for example, the color
of the marker is represented with a vector type. In
most cases these data types are used, but each
developer can also define their own data structures.
Even the interface remains the same; it is
possible to make dynamic "interfaces" by changing
the set of properties provided by a service. New
properties can be attached to a service during
operation, and they are shown when the client
requests "properties" again. This feature is used in
the Qutie robot (Tikanmäki and Vallius 2004),
where the properties of a new attached hardware
component appear on the list of properties as soon as
they are available.
Table 1: Examples of commonly used data types.
Data type Example
vector (1.0 0.1 0.1)
list ((1.0 0.0) (2.0 0.1))
marker <marker>
<location>(1.0 0.1)</location>
</marker>
As the value of the property in communication is
an array of characters, a service can be implemented
over any communication protocol containing the
possibility to transfer data characters. The current
implementation contains RS232, TCP/IP sockets,
HTTP as well as several middleware like CORBA
and ICE. To be able to communicate between
various protocols, special proxies have been made to
transfer a call from one media to another. As an
example, the Property Service in Sony's AIBO robot
communicates through a TCP/IP socket and a
Wireless LAN with a PC that contains a wrapper to
convert property calls to other protocols, such as
ICE or CORBA calls. This provides the possibility
to control AIBO from any property client without
knowledge of how the AIBO is actually connected
to the system. The implementation of a proxy is
simple, as it simply delivers property calls from one
protocol to another.
3.3 GUI as a Property
A service may contain special properties that can be
used to create user interfaces automatically. Several
of properties may have a ".gui" extension property
that returns the preferred GUI component for the
property. The service can also provide a class that
contains the compiled code for the GUI component.
For example, the "movement.gui.java" property
returns the java class that can operate property
movement on the service. If a new version of the
GUI component is then developed, it can be received
from the service without a need to change the client
side user interface. Instead of requesting the GUI
components from each service they can also be
requested from a special “GUIPropertyService”,
whose purpose is to provide standard GUI
components for various property types
3.4 Data Transfer Principles
The ideology of Property Service is to always reduce
the need for data delivery if possible. One way to do
this is by implementing several automatic features
for services. Instead of continuously sending moving
commands to a robot, we prefer to send only target
location or several route points. Instead of sending
raw image data, we prefer to request only the targets
that vision system can recognize from the view. If
raw images are needed for remote driving of a robot,
a commonly used compression format, such as
JPEG, is used.
Several standard sets of properties have been
used for different services. As each service delivers
data in the same format, and understands the same
commands, different services can be used by the
client service. A good example of this is to use
different robots with the same user interface.
PROPERTY SERVICE ARCHITECTURE FOR DISTRIBUTED ROBOTIC AND SENSOR SYSTEMS
229
3.5 Platforms
Currently services are implemented using C, C++,
Java, PHP or Python. Services can be compiled and
run with Windows and different Unix systems. A
Property Service for AIBO's operating system Open-
R has also been developed.
As one criterion for the architecture was
simplicity, services can also be implemented on
devices containing low calculation power. In many
types of robotics or sensor nodes on sensor
networks, it is reasonable to use embedded
microcontrollers instead of a PC. Property Service
has also been implemented using standard C and can
be used on many embedded platforms, for example,
in “Atomi” boards containing an Atmel 8-bit AVR
microcontroller (Tikanmäki and Vallius 2004) and
ARM-based embedded computers running
embedded Linux. These two platforms are good
examples of systems that cannot run complex
middleware.
3.6 Implementing New Resources
The implementations of Property Service include
several functions and classes that facilitate the
creation of new services. Automatic features, such as
a dynamic set of properties, are ready for use in the
PS core library. One of the most useful tools is
called Class Property Service. Class Property
Service is a class that creates a service automatically
from given class. The automatic service creation is
available for Java and C++ classes. The main
advantage of this service is that it facilitates the
reuse of previously built classes. For example,
researchers may want to be able to use their old
manipulator remotely. The manipulator has a control
box that can be used from a PC through a serial port.
By using Class Property Service, a previously made
control class can be used as a part of the distributed
system, as the Class Property Service creates
properties from methods and attributes of the class
according to defined rules.
In addition to robots and sensors, Property
Service can be used to control various other devices
in the environment. Since the interface is simple and
can also be used in simple microcontrollers,
different kinds of devices, like electric locks, motion
sensors or room light control units, can be included
in the distributed system. This provides the
possibility for a robot to use these resources, which
increases the possibilities of new applications.
3.7 Standard Services
Some commonly used types of services have been
standardized, so that each service in the type
category provides at least a certain set of properties.
The main advantage of this is the possibility to use
several kinds of services (or system resources)
without a need to modify the control program. A
good example of this is that the user can change the
robot into a different kind of robot to do the same
task without modifying the control program.
3.7.1 Mobile Robot Service
The main standardized service is a mobile robot
service. A mobile robot service contains properties
related to movement, sensing and physical
dimensions. Each robot's property service provides
the same properties. Table 2 shows a basic set of
properties of a mobile robot service.
Table 2: Examples of commonly used data types.
location 6D global location of the robot,
containing x, y, z and rotations around the
axis
velocity 6D movement of the robot, including
translations and rotations
actuators List of actuators on the robot, contains
sub-properties for each actuator
sensors List of sensors, with several subproperties
behaviors List of the robot’s primitive
functionalities. All robots must have at
least a "move to" behavior.
Standard properties are the same regardless of
the moving mechanism of the robot. When the robot
is requested to move forward one meter (by using a
“behaviors.moveto” functional property with a
marker as a parameter), a walking Aibo or a wheeled
Scout robot moves one meter forward according to
its moving capabilities. If a robot contains additional
actuators, such as arms or legs, properties for them
are added to a list of actuators properties, but the
basic functionality remains the same. The main
advantage of this is the possibility to control all
kinds of mobile robots with the same control
software or user interface while also providing
special features of each robot.
3.7.2 Sensor Service
One main type of service is sensor. A sensor service
includes different sensors, such as sonar and
cameras, as well as different controlling devices, e.g.
joysticks, GPS devices and touch pads. User
interfaces are also like sensors, because they sense
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
230
the operational requests of the human user. The
basic properties of sensor services are "location",
which contains the location of the sensor in its
context, and "data", which returns the raw data
captured by the sensor. The default coordinate
system for sensors location is relative to its base, for
example, the robots origin. By using request
parameters, different coordinate systems can also be
used. In addition to raw sensor data, various kinds of
refined information can be attached to the sensor's
properties. The most advanced system is the vision
sensor's property set.
Vision service is the most advanced sensor
service and a good way to integrate several kinds of
machine vision methods to a robotic system. Several
different methods can be activated separately, and
the result of image processing can be requested from
the service. Results can be requested in several
forms. For example, a remote client can request an
edge-detected image or segments of edges from the
vision service. The vision service is the interface to
one or several cameras, but it can also process
images sent by other services. As the interface is
always the same, different kinds of cameras can be
used in the same way. All targets detected by the
vision sensor can be received in marker format.
3.7.3 Resource Service
To be able to find the available resources in s
distributed system, a special Resource Property
Service has been introduced. The properties of this
service are references to services available in the
system. New resources can contact it to notify of
their presence. When a service contacts the resource
service, it gives information how it can be contacted,
like its address and protocol(s). Services are then
shown as properties of Resource Property Service
and each property contains the name of the service
and contact information. For example, CORBA-
based services' contact information is the IOR of the
service and TCP/IP or ICE services indicate their IP
address and the port where they can be reached.
The resource service actively checks the
existence of services and removes the resources that
are not available any more. Resource Property
Service also contains several functional properties
that can be used to search services using parameters.
For example, a client might want to find all available
mobile robots located in a certain room. For the
search request, Resource Property Service searches
for services that are mobile robots and whose
"location" property matches the client’s request. The
resource service also starts up new system services
when necessary.
3.7.4 Grouping Services
Another architectural solution is to group several
services into one Property Service. A good example
of this is to group a set of simple miniature robots
into one Swarm Property Service (Tikanmäki 2004).
Miniature robots with low computational power are
commanded through a common radio channel. Each
robot's properties are shown in a hierarchical set of
properties of the swarm service, shown in Table 3.
The properties of a single robot can be reached
through these properties, and each property of the
mobile robot service interface becomes a sub-
property of Group Property Service with a
“robots.<name>” prefix. The “<name>” parameter
changes according the robot currently used. In
addition to a single robot's properties, Grouping
Property Service contains various functional
properties that can simultaneously control a larger
set of robots. For example, the client wants a swarm
of robots to move to a certain destination. Grouping
Property Service can create a sub set from selected
robots and order each individual to move to the
destination. In the case of group of mobile robots, a
groups of robots are controlled by properties similar
to those used to control an individual robot. For
example, Swarm Property Service has “behaviors”
properties that control the whole group.
Table 3: Examples of properties of swarm service.
robots robots currently belonging to this swarm
each robot has sub-properties included in
robot service properties
location location of the swarm
behaviors List of the primitive functionalities.
Similarly to single robots, group can be
controlled with same behaviors like
"move to" behavior.
Resource Property Service and Group Property
Service have several similarities, and Resource
Property Service can be expanded to act as a
grouping service. In this case, the resource service
reroutes the property request. Instead of giving the
reference of the service to the client, it acts as a
proxy and asks for the property value from the
service and delivers the reply to the client. This
feature is useful in, for example, a long latency
system and a long request time in some cases,
because the grouping service is already connected to
the service, and therefore the client does not need to
make a direct connection. These services also
provide full transparency to the system, as the client
PROPERTY SERVICE ARCHITECTURE FOR DISTRIBUTED ROBOTIC AND SENSOR SYSTEMS
231

does not need to know the address or even the
number of robots taking a part in the action.
3.7.5 State Machine Service
In addition to user interface client services, some
control services have also been created. One of the
main services is State Machine Service. It provides a
resource that can execute RDF-formed state
machines, which can control complex conditional
sequences, being able to provide multiple property
services at the same time. This has been described
previously in (Mäenpää 2004). State Machine
Service can control a large set of services
simultaneously. Currently, State Machine Service
also has a visual user interface, where the user can
create and modify state machines graphically and
during operation. By using Storage Service,
introduced below, the state machine or part of it can
be stored into a database for further usage or
execution.
3.7.6 Storage Service
Another architectural service is Storage Service. It is
a combination of file transfer systems and databases.
The service can be started for a specified directory in
operating systems and all (or only selected) files are
shown as properties of the service. A remote client
can request a property, named according to the
filename, and receive the value of the property,
which is the content of the file. The same procedure
can be used to store new files and data into a service,
by setting a new property in the service. For
example, a robot can send captured images to a
storage service, which stores the images in the
memory (or on a hard disc) of the service. As in
Resource Property Service, Storage Service may
also contain several intelligent search methods, and
the client can request files according to specified
features. Storage Service has been used to store
captured data such as images, to upload and
download control sequences and state machines, and
to request GUI components remotely.
3.7.7 Environment Model as a Service
To be able to operate, a distributed system must
have knowledge of the environment where the
services, such as robots and sensors, are operating. If
the system is not designed to be fully reactive, it is
reasonable to collect information received by
services. The system can have one or several
environment model services. If only one model is
used, all the services send their measurements to this
service, and the model service performs data fusion
and updates the model. Each service might also have
its own model, which is a local representation of the
service’s way of receiving information from the
environment. For example, a ceiling camera might
have an environment model service that provides
information received using the camera. Markers are
used in most communication and data storing, but
other methods are also possible. For example, a
model can contain a grid of temperature values
gathered by a swarm of small robots or a sensor
network. In this case, the temperature map is
updated according to the locations of the
measurements.
4 COMPARISON
The overall performance of the system depends on
the computational power of the platform and the
speed of the communication channel used. However,
in a comparison of the development times of a new
service and cooperation between different
middleware, Property Service provides a great
advantage. The amount of required lines of code is
very small compared with, for example, CORBA-
based robot middleware that provides the same
features and functionalities of the resource. As the
capabilities of a robot or other service increase, it
becomes even more useful that the actual interface
does not need to be changed.
As the code is highly reused, new services are
fast to implement and all system services like state
machines, and storage services are available for use
immediately. For example, the “move to” behavior
is common to all robots; no matter if they are legged,
wheeled, or even a manipulator. System services
also provide great advantages in building
applications for distributed systems. This provides
even more advantages compared with other systems.
Passing messages as text strings is expensive
compared with other formats (like language-specific
byte arrays). The performance of communication has
been improved by sending only essential
information and by using refined data instead of
continuous control commands or raw sensor data.
Several applications and example systems have been
created using Property Services. Property Service
has been successfully used for remote control of
several mobile robots that provide audio and video
data, and receive several moving commands
(Tikanmäki 2003) using CORBA middleware and a
wireless LAN. It has also been used to create remote
operation for a swarm of simulated robots
(Tikanmäki 2004). Both are good examples of
applications where quick response between services
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
232

is an essential requirement. Multi-robot cooperation
and designing of operation using state machines has
been demonstrated in reference (Mäenpää 2004).
5 CONCLUSION
The main advantage of Property Service in
compared with competitive architectures is the ease
of adding new resources to a distributed robotic
system. Using Class Property Service, classes that
are already available can be used remotely and
connected to a larger system quickly and without a
need to implement a code related to communication
between services. As Property Service can be
implemented on various communication channels
and platforms, different kinds of new resources can
be attached to the system. The usability of the
architecture is not limited to robotics, it can also be
used in other distributed systems, for example, in
home automation systems, sensor networks, and
industrial automation. As these devices become part
of the architecture, they can be operated remotely or
by the robot's control software, and robots easily
became a part of the system. Using Resource
Property Service, the robot can, for example, search
for the light service of a room and switch on the
light on the room upon entering the room. Complex
applications built using state machines are easy to
change, and the user can monitor their operation
online using state machine visualization.
ACKNOWLEDGEMENTS
This work has been partly funded by Finnish
Academy.
REFERENCES
OMG. Real-Time CORBA Specification. Object
Management Group, Inc., 1.1 edition, August 2002.
Rea 1999. Mobility 1.1, Robot Integration Software,
User’s Guide, iRobot Corporation, MobilityTM
software
Gerkey, B., Vaughan, R. T. & Howard, A. 2003, The
player/stage project: Tools for multi-robot and
distributed sensor systems, in `Proceedings of the 11th
International Conference on Advanced Robotics
(ICAR'03)', Coimbra, Portugal, pp. 317–323.
Utz H., Sablatn¨og S., Enderle S., and Kraetzschmar G.
2002. Miro - middleware for mobile robot
applications. IEEE Transactions on Robotics and
Automation, 18(4), August 2002.
Brooks A., Kaupp T., Makarenko A., Orebäck A. and
Williams S. 2005. "Towards Component-Based
Robotics". IEEE/RSJ International Conference on
Intelligent Robots and Systems 2005.
Henning M., Spruiell M. 2004 Distributed Programming
with Ice, ZeroC Inc.,
http://www.zeroc.com
Wang J., Su J., and Xi Y., 2001 “COM-based software
architecture for multisensor fusion system,”
Information Fusion, vol. 2, no. 4, pp. 261– 270,.
Corke P., Sikka P., Roberts J., E. Duff, "DDX: A
Distributed Software Architecture for Robotic
Systems", Australasian Conference on Robotics and
Automation 2004
Montemerlo M., Roy N., and Thrun S.. Perspectives on
standardization in mobile robot programming: The
carnegie mellon navigation (carmen) toolkit. In
IEEE/RSJ Intl. Workshop on Intelligent Robots and
Systems, 2003.
URBI http://www.urbiforge.com/
Tikanmäki A., Röning J., Riekki J. 2003 Remote operation
of robotics systems using WLAN- and CORBA based
architecture, SPIE / Intelligent Robots and Computer
Vision XXI, Oct 27 - 31, Rhode Island, Providence, RI
USA, 2003
Mäenpää T., Tikanmäki A., Riekki J. and Röning J., ,
2004 A Distributed Architecture for Executing
Complex Tasks with Multiple Robots, IEEE 2004
ICRA, International Conference on Robotics and
Automation,Apr 26 - May 1, New Orleans, LA, USA
Tikanmäki A., Röning J. 2004 Advanced Remote
Operation of swarms of Robots, SPIE / Intelligent
Robots and Computer Vision XXII, Philadelphia,
USA
Tikanmäki A., Vallius T., Röning J., 2004 Qutie -
Modular methods for building complex mechatronic
systems, ICMA - International Conference on Machine
Automation, Nov. 24.-26., Osaka, Japan
PROPERTY SERVICE ARCHITECTURE FOR DISTRIBUTED ROBOTIC AND SENSOR SYSTEMS
233
