
BEHAVIOR BASED DESCRIPTION OF DEPENDABILITY
Defining a Minium Set of Attributes for a Behavioral Description of Dependability
Jan R
¨
udiger, Achim Wagner and Essam Badreddin
Automation Laboratory, University of Mannheim, B6, 23-29, Building B, EG, 68131 Mannheim, Germany
Keywords:
Fault-tolerant systems, Autonomous systems, Behavioral systems.
Abstract:
Dependability is widely understood as an integrated concept that consists of different attributes. The set
of attributes and requirements of each attribute varies from application to application thus making it very
challenging to define dependability for a broad amount of application. The dependability, however, is of
great importance when dealing with autonomous or semi-autonomous systems, thus defining dependability
for those kind of system is vital. Such autonomous mobile system are usually described by their behavior. In
this paper a minimum set of attributes for the dependability of autonomous mobile systems is proposed based
on a behavioral definition of dependability.
1 INTRODUCTION
Complex computing systems, such as network com-
puters, computer controlled plants or flight controll
systems need not only to fulfill their functional but
also their non-functional properties like availabil-
ity, reliability, safety, performance, dependability etc.
Non-functional properties reflect the overall quality of
a system. Besides performance the dependability is
getting a more important non-functional requirement
of a system.
The dependability is usually understood as an inte-
grated concept (Avizienis et al., 2004b; Avizienis
et al., 2004a; Randell, 2000; Candea, 2003; Dews-
bury et al., 2003) that further consists of attributes that
affect the dependability of the system. The set of at-
tributes and the requirements on each attribute vary
from application to application. This makes it hard to
define dependability for a broad amount of applica-
tions.
The dependability of a system is particularly im-
portant when dealing with autonomous or semi-
autonomous systems. With an increasing degree of
autonomy and safety requirements the requirements
for dependability increase hence being able to mea-
sure and compare the dependability of these system is
getting more and more important.
In this paper a minimum set of attributes for the de-
pendability of autonomous mobile systems is pro-
posed.
This paper is outlined as follows: In Section 2 a de-
scription for systems on which dependability is usu-
ally defined is presented. Since the dependability def-
inition used throughout this paper is based on a dif-
ferent definition of a system the equivalence of the
two system definitions is shown. In Section 3 the dif-
ferent definitions used in the literature are used and
again compared to the behavior based definition used
throughout this paper. Section 4 summarizes the at-
tributes of dependability and a minimum set of those
attributes is proposed based on the behavioral defini-
tion of dependability and of the attributes. The paper
ends with the discussion of the set in Section 5 and
the conclusion.
2 SYSTEM
According to (Randell, 1999; Avizienis et al., 2004b;
Avizienis et al., 2004a; Jones, 2003) the system for
which dependability will be discussed is described by
its
• functional and non-functional properties,
341
Rüdiger J., Wagner A. and Badreddin E. (2007).
BEHAVIOR BASED DESCRIPTION OF DEPENDABILITY - Defining a Minium Set of Attributes for a Behavioral Description of Dependability.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 341-346
DOI: 10.5220/0001650203410346
Copyright
c
SciTePress

• the boundaries of the system,
• the environment the system is designed for,
• the system behavior,
• the service the system delivers, and
• its structure.
In Wikipedia a System (from the Latin (syst
¯
ema),
and this from the Greek συστηµα (sust
¯
ema)) is de-
fined as an assemblage of entities/objects, real or ab-
stract, comprising a whole with each and every com-
ponent/element interacting with or related to at least
one other component/element. Any object which has
no relationship with any other element of the system,
is not a component of that system. A subsystem is
then a set of elements, which is a system itself, and a
part of the whole system.
In this view it is equal wether a system is connected
to another system or to a user, who is again treated as
a system.
A system is usually defined by its functional and
non-functional properties. The functional proper-
ties define specific behaviors of the system or sub-
system while the non-functional properties define
overall characteristics of the system. Thus, the non-
functional properties define properties the system
must satisfy while performing its functional proper-
ties. Among other things the non-functional proper-
ties of a system are: functionality, performance, avail-
ability, dependability, stability, cost, extensibility,
scalability, manageability, application maintainabil-
ity, portability, interface, usability and safety. This
list is non-exhaustive since the non-functional prop-
erties of a system are highly system specific (Torres-
Pomales, 2000; Sutcliffe and Minocha, 1998; Franch
and Botella, 1998). When systems or sub-systems in-
teract with each other or with their environment the
common boundaries of those systems as well as the
environment itself must be defined. A system acting
well in the specified environment may fail in an envi-
ronment its was not designed for. The system bound-
ary defines the scope of what the system will be and
as such defines the limits of the system.
The behavior of the system is how the system imple-
ments its intended function. The behavior of a dy-
namic system as defined (Willems, 1991) is a time
trajectory of the legal states of the system. The le-
gal states of the system are further divided into ex-
ternal and internal states. External states of a system
are those which are perceivable by the user or another
system. The external states thus define the interface
of the (sub-)system. The remaining states are inter-
nal.
The service the system delivers is its visible behavior
to the user or another system. According to the above
definition of behavior this is the time trajectory of its
external states.
Last but not least the structure of the system defines
how the system is partitioned into sub-systems and
how those sub-systems are connected to each other
and how the system is ,,connected” to the environ-
ment. The structure of the system also defines how
the communication of the sub-systems is organized.
When dealing with autonomous mobile robots the
system is often viewed as a black box and described
by its behavior. The behavioral approach is very com-
mon when dealing with autonomous mobile robots
(Brooks, 1986; Michaud, ; Jaeger, 1996). The frame-
work of Willems (Willems, 1991) is used for describ-
ing a system by its behavior. In this framework a dy-
namical system is defined to be ,,living” in an universe
U.
Definition 2.1 A dynamical system
∑
is a triple
∑
=
(T, W, B) with T ⊆ R the time axis, W the signal
space, and B ⊆ W
T
the behavior.
A mathematical model of a system claims that cer-
tain outcomes are possible, while others are not. This
subset is called the behavior of the system. The be-
havior B is thus the set of all admissible trajecto-
ries. The universe U is the equivalence to the envi-
ronment as described above and the behavior B is the
equivalence to function of the system. In (R
¨
udiger
et al., 2007) the definition of a dynamical system is
extended by a set of basic and fused behaviors B and
by a mission w
m
of the system which is the equiva-
lence of the service the system is intended to deliver.
Such a system is defined as:
Definition 2.2 Let Σ = (T, W, B) be a time-invariant
dynamical system then B ⊆ W
T
is called the set of
basic behaviors w
i
(t) : T → W, i = 1...n and B the set
of fused behaviors.
B is a set of trajectories in the signal space W. The
set of basic behaviors B of an autonomous system, in
contrast to the behaviors B of a dynamical system as
defined in (Willems, 1991), is not the set of admis-
sible behaviors, but solely those behaviors which are
given to the system by the system engineer (program-
mer).
The mission of such a system is defined as:
Definition 2.3 Let Σ = (T, W, B) be a time-invariant
dynamical system. We say the mission w
m
of this sys-
tem is the map w
m
: T → W with w
m
∈ B.
A dynamical system can, like the system described
above, be divided into subsystem having their own
behavior. This definition of system and behavior is
used throughout this paper.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
342

3 DEFINITION OF
DEPENDABILITY
Beside the other mentioned non-functional properties
of a system the dependability is getting a more impor-
tant non-functional property.
The general, qualitative, definitions for dependability
used in the literature so far are:
Carter (Carter, 1982): A system is depend-
able if it is trustworthy enough that reliance
can be placed on the service it delivers.
Laprie (Laprie, 1992): Dependability is that
property of a computing system which allows
reliance to be justifiably placed on the service
it delivers.
Badreddin (Badreddin, 1999): Dependability
in general is the capability of a system to suc-
cessfully and safely fulfill its mission.
Dubrova (Dubrova, 2006): Dependability is
the ability of a system to deliver its intended
level of service to its users.
All four definitions have in common that they define
dependability on the service a system delivers and the
trust that can be placed on that service. As mentioned
before the service a system delivers is the behavior as
it is perceived by the user, which in our case is also
called the mission of the system.
A more quantitative definition for dependability used
in (Avizienis et al., 2004a) is:
Dependability of a system is the ability to
avoid service failures that are more frequent
and more severe than is acceptable by the
user(s).
This definition, however, does not directly include
the service the system is intended to deliver nor does
it include the time up to which the system has to
deliver the intended service.
Derived from the above definitions and the behavioral
definition of a system a behavior-based definition
for dependability for autonomous mobile robots was
introduced in (R
¨
udiger et al., 2007). This includes
the definition of a mission which coresponds with the
service mentioned above.
4 ATTRIBUTES OF
DEPENDABILITY
According to (Avizienis et al., 2004b; Avizienis et al.,
2004a; Randell, 2000) the dependability is an inte-
Dependability
Attributes
Availability
Reliability
Safety
Confidentiality
Integrity
Maintainability
Threats
Faults
Errors
Failures
Means
Fault Prevention
Fault Tolerance
Fault Removal
Fault Forecasting
Figure 1: The dependability tree.
grated concept that further consists of the attributes
(see also Figure 1)
• Availability readiness for correct service,
• Reliability continuity of correct service,
• Safety absence of catastrophic consequences for
the user(s) and the environment,
• Confidentiality absence of unauthorized disclo-
sure of information,
• Integrity absence of improper system state alter-
ation and
• Maintanability ability to undergo modifications
and repairs.
In (Candea, 2003) only reliability, availability and
safety together with security is listed; however, se-
curity is seen as an additional concept as described
below.
In (Dewsbury et al., 2003) the dependability attributes
for home systems are defined as:
• Trustworthiness the system behaves as the users
expects,
• Acceptability a system that is not acceptable will
not be used,
• Fitness for its purpose the system must fit the
purpose it was designed for and
• Adaptability the system must evolve over time
and react to changes in the environment and the
user.
The dependability specifications of a system must set
requirements for the above attributes. Based on a spe-
cific system the dependability of the system depends
on those requirements for a subset or all of the above
attributes. Since the (sub-)systems are designed in a
behavioral context it is common to also describe the
attributes of dependability in a behavioral context or
the other way round to describe the requirements for
BEHAVIOR BASED DESCRIPTION OF DEPENDABILITY - Defining a Minium Set of Attributes for a Behavioral
Description of Dependability
343

the attributes on the behavior of the (sub-)system.
Before further describing the attributes it is, however,
important to define a priority for the attributes.
4.1 Safety
For autonomous mobile robots the main attribute is,
or should be, safety. The attribute safety is not to be
mistaken with the attribute security which is a com-
bination of the attributes confidentiality, integrity and
availability and as thus an additional concept (Sama-
rati and Jajodia, 2000; Cotroneo et al., 2003; Cera
et al., 2004). For a comparison of security and de-
pendability see (Meadows and McLean, 1999). Even
if the the intended service of the system cannot be
fullfilled the safety requirements of the system are not
allowed to be violated. Thus, the requirement on the
behavior of the system, as defined in section 2, is that
it must always fullfill its safety requirements.
From a reliability point of view, all failures are equal.
In case of safety, those failures are further divided
into fail-safe and fail-unsafe ones. Safety is reliabil-
ity with respect to failures that may cause catastrophic
consequences. Therefore, safety is unformaly defined
as (see e.g. (Dubrova, 2006)):
Safety S(t) of a system is the probability that
the system will either perform its function cor-
rectly or will discontinue its operation in a
fail-safe manner.
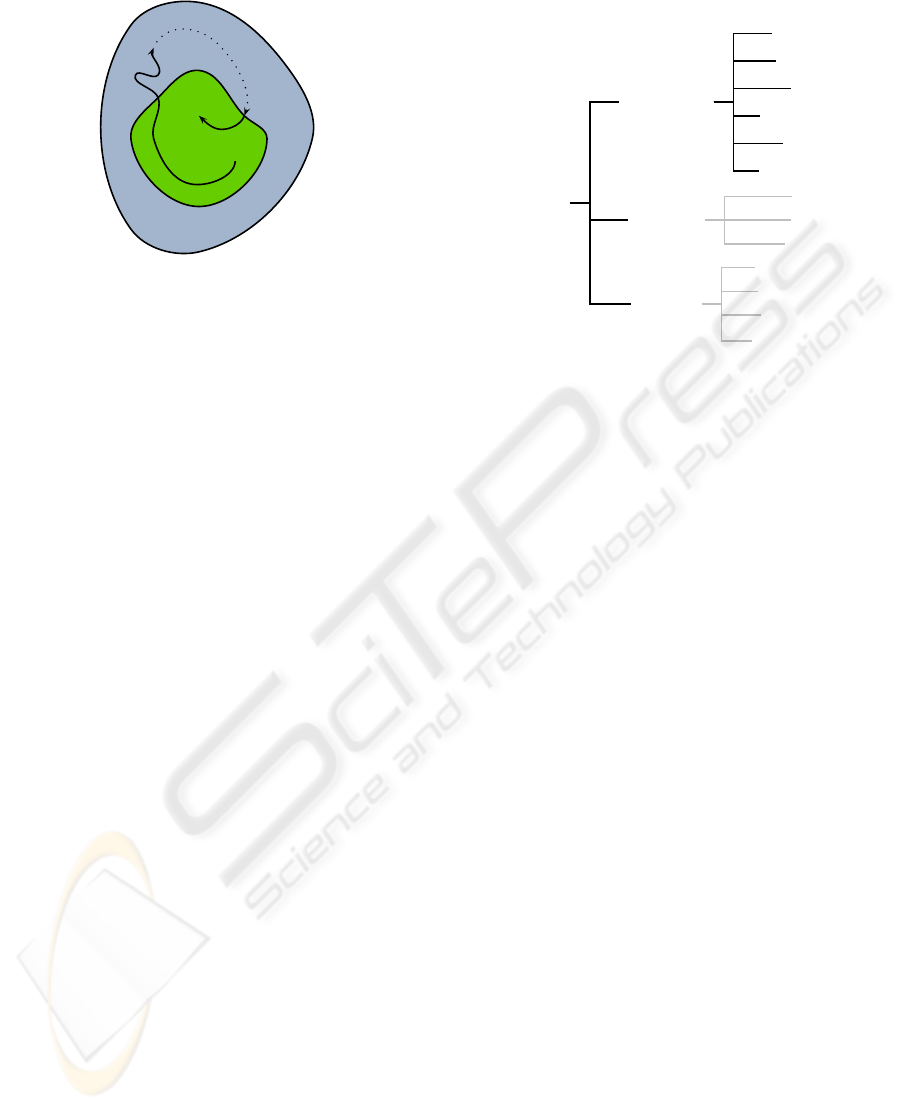
In (R
¨
udiger et al., 2007) an area S around the be-
havior of the system B is introduced, which leads to
catastrophic consequences when left. Safety of a sys-
tem Σ is then defined as:
Definition 4.1 Let Σ = (T, W, B), T = Z or R, be
a time-invariant dynamical system with a safe area
S ⊇ B. The system is said to be safe if for all t ∈ T
the system state w(t) ∈ S.
The definition is illustrated in Figure 2. This defini-
tion is consistent with the idea that a safe system is
either operable or not operable but in a safe state.
4.2 Availability Vs Realiability
Reliability means (Dubrova, 2006):
Reliability R|
t
is the probability that the sys-
tem will operate correctly in a specified oper-
ating environment in the interval [0,t], given
that it worked at time 0.
An autonomous system is, thus, said to be reliable if
the system state does not leave the set of admissible
trajectories B. In contrast to reliability the availabil-
ity is defined at a time instant t while the reliability is
defined in a time interval.
BS
w
Figure 2: Safety: The system trajectory w leaves the set of
admissible trajectories B but is still considered to be safe
since it remains inside S.
Availability A|
t
is the probability that a system
is operational at the instant of time t.
Availability is typically important for real-time sys-
tems where a short interrupt can be tolerated if the
deadline is not missed. This also holds for au-
tonomous mobile systems. In (R
¨
udiger et al., 2007)
the availability is defined as:
Definition 4.2 Let Σ = (T, W, B), T = Z or R, be a
time-invariant dynamical system. The system is said
to be available at time t if w(t) ∈ B. Correspondingly,
the availability of the system is the probability that the
system is available.
For dependable autonomous mobile systems as de-
fined above requirements for reliability are redundant
and can be omitted. In case of reliability and avail-
ability it is sufficient to define requirements for the
availability.
4.3 Maintainability
A maintainable system is ,,able to react“ either au-
tonomously or by human interaction to changes in the
system and the environment.
Maintainability is the ability of a system to un-
dergo modification and repairs.
While the requirements for the first two attributes
rather passively define the dependability of a system,
the maintainability gives the system the ability to re-
act to changes. An event that would reduce or violate
the dependability of the system can counteract to re-
cover the dependability. In (R
¨
udiger et al., 2007) the
maintainability is defined as:
Definition 4.3 A dynamical system Σ = (T, W, B)
with the behaviors B is said to be maintainable if for
all w
1
∈ W a w
2
∈ B and a w : T ∩ [0, t] → W exist,
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
344
B
B
w
1
w
w
2
Figure 3: Maintainability: The system trajectory w
1
leaves
the set of admissible trajectories B and is steered back to B
with the trajectory w ∈ B.
with w
′
: T → W defined by:
w
′
(t
′
)
=
w
1(t
′
)
for t
′
< 0
w
(t
′
)
for 0 ≤ t
′
≤ t
w
2(t
′
−t)
for t
′
> t
The definition is illustrated in Figure 3. An au-
tonomous mobile system is said to be maintainable
if it is able to steer the system from any trajectory
w 6∈ B back to the set of admissible trajectories B in
time [0,t].
4.4 Confidentiality and Integrity
Confidentiality has been defined by the International
Organization for Standardization (ISO) as ”ensuring
that information is accessible only to those autho-
rized to have access”. This attribute is very important
for systems like operating systems or transaction sys-
tems. For autonomous mobile robots, however, this
attribute is underpart. If informations of the system
will be available un-authorized then this will not re-
duce the dependability of the autonomous mobile sys-
tem. For this attribute the functions of the underlaying
operating system are used.
When a program is executed on a system it is usually
checked whether the program is allow to be runned by
the user. Integrity ensures that the program flow and
the information of the program will not be altered dur-
ing the execution. Even if a change, wether it was on
purpose, by an external or by soft- or hardware fail-
ure, in the program flow could be severe this aspect is
already covered by the safety attribute.
5 DISCUSSION
Dependability
Attributes
Availability
Reliability
Safety
Confidentiality
Integrity
Maintainability
Threats
Faults
Errors
Failures
Means
Fault Prevention
Fault Tolerance
Fault Removal
Fault Forecasting
Figure 4: The resulting dependability tree.
The resulting dependability tree for autonomous mo-
bile systems is shown in Figure 4. The requirements
for the safety assures that failures in the system will
not lead to catastrophic consequences. The require-
ments for the availability assures that the system is
operational at the desired time instances t and finally
the maintainability requirements assures that even in
case of changes of the system or the environment the
system is able to react and modify itself to maintain
the dependability of the system.
6 CONCLUSION
Dependability is part of the non-functional proper-
ties of a system which reflect the overall quality of
a system. Qualitative definitions for dependability
like in (Carter, 1982; Laprie, 1992; Badreddin, 1999;
Dubrova, 2006) further divide the dependability into
attributes. Those attributes are again rather qualitative
and also not distinct. Autonomous mobile systems
are often described by their behavior. This aspect was
utilized in this paper to propose a minimum subset of
the attributes of dependability, as defined in (R
¨
udiger
et al., 2007), which are defined quantitative and can
still ensure the dependability of the autonomous mo-
bile system.
REFERENCES
Avizienis, A., Laprie, J.-C., and Randell, B. (2004a). De-
pendability and its threats: A taxonomy.
Avizienis, A., Laprie, J.-C., Randell, B., and Landwehr, C.
(2004b). Basic concepts and taxonomy of dependable
BEHAVIOR BASED DESCRIPTION OF DEPENDABILITY - Defining a Minium Set of Attributes for a Behavioral
Description of Dependability
345

and secure computing. IEEE Trans. on Dependable
and Secure Computing, 1(1):11–33.
Badreddin, E. (1999). Safety and dependability of mecha-
tronics systems. In Lecture Notes. ETH Z
¨
urich.
Brooks, R. A. (1986). A robust layered control system for a
mobile robot. IEEE Journal of Robotics and Automa-
tion, 2(1):14–23.
Candea, G. (2003). The basics of dependability.
Carter, W. (1982). A time for reflection. In Proc. 12th
Int. Symp. on Fault Tolerant Computing (FTCS-12).
FTCS-12) IEEE Computer Society Press Santa Mon-
ica.
Cera, C. D., Kim, T., Han, J., and Regli, W. C. (2004). Role-
based viewing envelopes for information protection in
collaborative modeling.
Cotroneo, D., Mazzeo, A., Romano, L., and Russo, S.
(2003). An architecture for security-oriented perfec-
tive maintenance of legacy software.
Dewsbury, G., Sommerville, I., Clarke, K., and Rounce-
field, M. (2003). A dependability model for domestic
systems. In SAFECOMP, pages 103–115.
Dubrova, E. (2006). Fault tolerant design: An introduction.
Draft.
Franch, X. and Botella, P. (1998). Putting non-functional
requirements into software architecture.
Jaeger, H. (1996). Brains on wheels: Mobile robots for
brain research.
Jones, C. (2003). A formal basis for some dependability
notions.
Laprie, J. C. (1992). Dependable computing: Basic con-
cepts and terminology. Ed. Springer Verlag, 1992.
Meadows, C. and McLean, J. (1999). Security and depend-
ability: then and now. In Computer Security, Depend-
ability, and Assurance: From Needs to Solutions, 7-
9 July 1998 & 11-13 November 1998, York, UK &
Williamsburg, VA, USA, pages p.166–70. Los Alami-
tos, CA, USA : IEEE Comput. Soc, 1999.
Michaud, F. Adaptability by behavior selection and obser-
vation for mobile robots.
Randell, B. (1999). Dependability - a unifying concept.
Randell, B. (2000). Turing Memorial Lecture: Facing up to
faults. j-COMP-J, 43(2):95–106.
R
¨
udiger, J., Wagner, A., and Badreddin, E. (2007). Behav-
ior based definition of dependability for autonomous
mobile systems. European Control Conference.
Samarati, P. and Jajodia, S. (2000). Data security.
Sutcliffe, A. G. and Minocha, S. (1998). Scenario-based
analysis of non-functional requirements.
Torres-Pomales, W. (2000). Software Fault Tolerance: A
Tutorial.
Willems, J. (1991). Paradigms and puzzles in the theory of
dynamical systems. Automatic Control, IEEE Trans-
actions on, 36(3):259–294.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
346
