
IMPROVED OCCUPANCY GRID LEARNING
The ConForM Approach to Occupancy Grid Mapping
Thomas Collins, J. J. Collins and Conor Ryan
Department of Computer Science and Information Systems, University of Limerick, Ireland
Keywords:
Robotics, Occupancy Grids, Machine Learning, Artificial Intelligence.
Abstract:
A central requirement for the development of robotic systems, that are capable of autonomous operation in
non-specific environments, is the ability to create maps of their operating locale. The creation of these maps is
a non trivial process as the robot has to interpret the findings of its sensors so as to make deductions regarding
the state of its environment. Current approaches fall into two broad categories: on-line and offline. An on-line
approach is characterised by its ability to construct a map as the robot traverses its operating environment,
however this comes at the cost of representational clarity. An offline approach on the other hand requires all
sensory data to be gathered before processing begins but is capable of creating more accurate maps. In this
paper we present a new means of constructing occupancy grid maps which addresses this problem.
1 INTRODUCTION
In recent times Occupancy Grids have become the
dominant paradigm for environmental modelling in
mobile robotics (D. Kortenkamp and Murphy, 1998).
An Occupancy Grid is a tessellated 2D grid in which
each cell stores fine grained qualitative information
regarding which areas of a robots operating environ-
ment are occupied and which are empty (Moravec and
Elfes, 1985; Elfes, 1989). Specifically, each individ-
ual cell in the grid records a certainty factor relating
to the confidence that the particular cell is occupied.
Such maps are extremely useful for mobile robotic
applications as they facilitate tasks such as naviga-
tion, path planning, localisation and collision avoid-
ance (Borenstein and Koren, 1991; Dissanayake et al.,
2001).
Currently in the Occupancy Grid mapping domain
there are two broad approaches: on-line and off-line.
The on-line approach is characterised by traditional
paradigms such as those from Moravec (Moravec and
Elfes, 1985), Matthies (Matthies and Elfes, 1988)
and Konolige (Konolige, 1997). The off-line ap-
proach has emerged from a more recent paradigm
from Thrun (Thrun, 2003). The on-line approach is
capable of generating maps in real-time as the robot
operates. However these maps often contain incon-
sistencies such as over estimation of occupied or free
space which is undesirable. The off-line approach on
the other hand, is capable of generating more consis-
tent maps but cannot do so in real time. These dia-
metric approaches give rise to a mode versus clarity
dilemma.
In this paper we introduce and empirically evaluate
a novel robotic mapping framework called ConForM
(Contextual Forward Modelling) which solves this
dilemma through combining the beneficial aspects
of both existing approaches. Results from empirical
evaluations we have undertaken show that ConForM
provides maps that are of better quality than existing
paradigms.
2 ON-LINE VS. OFFLINE
OPERATION: THE ROBOTIC
MAPPING DILEMMA
Two types of model are available for sensory inter-
pretation in robotic mapping. These are the Inverse
and the Forward models (Thrun, 2003). An inverse
model attempts to describe an environment by trans-
492
Collins T., J. Collins J. and Ryan C. (2007).
IMPROVED OCCUPANCY GRID LEARNING - The ConForM Approach to Occupancy Grid Mapping.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 492-497
DOI: 10.5220/0001651904920497
Copyright
c
SciTePress

(a) Ideal Map (b) Inverse model:
Moravec and Elfes 1985
(c) Inverse model: Thrun
1993
(d) Forward model:
Thrun 2001
Figure 1: Illustrating map generation using inverse/forward sensory models. Overall environmental size:
44m x 35m
. Corri-
dor width:
1.5m
.
lating from effects (sensory measurements) to causes
(obstacles). The forward model describes the charac-
teristics from causes to effects. The inverse model is
associated with on-line real-time paradigms such as
those mentioned previously and the forward with the
offline, non real-time approach.
Traditional approaches using inverse sensor mod-
els are prone to generating maps that are inconsis-
tent with the operational data from which they were
constructed (Thrun, 2003). This is because such
techniques decompose the high-dimensional mapping
problem into a number of one-dimensional estimation
problems, one for each cell in the map. In doing so
they do not consider the dependencies that exist be-
tween these cells. The forward sensory model ad-
dresses this deficit by considering the dependencies
that exist between neighbouring grid cells thereby
generating more consistent maps.
Figure 1 presents some illustrative maps. Each
paradigm used identical sensory data in generating the
maps shown. As can be seen the map generated by the
forward model is more compatible with the ideal map.
This demonstrates the problem currently inherent in
the domain which we are addressing. That is, the
dilemma of selecting an on-line paradigm that yield
maps of lower accuracy versus an off-line paradigm
which produces better quality maps.
3 SPECULARITY AND
REDUNDANT INFORMATION
IN ROBOTIC MappINg
In addition to the type of sensory model used by
a mapping paradigm two other issues have a direct
correlation on the quality of map produced. These
are Specular Reflection and Redundant Information
(Murphy, 2000; Konolige, 1997).
• Specular Reflection: generally occurs when a
sonar beam hits a smooth surface and is reflected
off the surface at an obtuse angle. This results
in either no reading being returned to the sensor
or an erroneous reading being returned that has
bounced off many surfaces.
• Redundant Information: commonly arises when
the robot has been in the same pose for a period
of time and hence its sensors report multiple iden-
tical readings from that pose.
4 THE CONFORM APPROACH
TO ROBOTIC MAPPING
ConForM has two distinct aspects. These are:
1. The explicit modelling of sensory data to deal
with the specular and/or redundant information.
2. The use of an on-line forward sensory model to
translate the sensory readings into occupancy val-
ues for inclusion in the grid map.
4.1 Conform: Dealing With Specular
Readings
ConForM’s treatment of the problem of specularity
is novel as we consider it from two perspectives. The
first is labelled Acceptability/Agreeability and the sec-
ond Trait Verification. At each time-step Acceptabil-
ity/Agreeability consider solely the set of readings
currently received and evaluates each with respect to
its neighbouring readings. Trait verification on the
other hand takes a wider perspective by evaluating
readings in relation to the current perceived state of
the environment.
4.1.1 Acceptability and Agreeability
Acceptability: Consider a reading s and let us assume
that it reports a range reading with a distance of d. As
operating environments are formed from regular fea-
tures and as the perceptual fields of neighbouring sen-
sors generally overlap we can assess the consistency
of a particular reading by evaluating its probabilistic
profile in relation to its neighbours. A reading whose
measurement is corrupted by Gaussian noise of zero
IMPROVED OCCUPANCY GRID LEARNING - The ConForM Approach to Occupancy Grid Mapping
493

mean and variance σ
2
has the following probability
distribution where m is the map as illustrated in equa-
tion 1. This is based on the standard specification of
a sensory model (Elfes, 1989).
p(s
t
|m) =
1
√
2πσ
2
e
−
1
2
(d)
2
σ
2
(1)
Strictly speaking m is the local map corresponding to
the current perceptual field and therefore a sub set of
the overall map that is produced.
Now consider the readings s
−1
and s
+1
the neighbour-
ing readings on either side of the reading s. The prob-
abilistic profile of these readings are used to support
or refute the reading s. If reporting an obstacle each
will have an associated distance d
−1
and d
+1
. There-
fore we can calculate the probability distribution for
these readings using equation 1. These distributions
are compared to determine if the readings are con-
sistent. This is accomplished by translating the read-
ing s to the position of s
−1
. Upper and lower bound
profiles for s are calculated at this position through
scaling the original distance to the point of interest
d by the amount of translation required and also tak-
ing cognisance of the natural error range of the sen-
sor. If the readings are reporting on the same environ-
mental conditions the reading s will be encompassed
by the determined bounds. If this is so the reading
is deemed as being acceptable and subsequently al-
lowed to progress for further consideration. An iden-
tical procedure is utilised when considering the read-
ing s
+1
. A reading s is discarded only when both ac-
ceptability tests indicate that it is unacceptable.
Agreeability: The sister concept of acceptability is
Agreeability. It considers readings that report free
space. It is similar to Acceptability in that we evaluate
a reading in terms of its neighbours. Robotic sensors
are good at accurately reporting free space meaning
that we can use a direct comparison method with free
space readings as it is the detection of an obstacle or
not which is important, not the actual difference in
any distance reported. Therefore when determining
agreement, for efficiency, we do not construct prob-
abilistic profiles for the readings. Rather we use the
ranges reported instead. If one of a readings immedi-
ate neighbours is not in agreement with the reading it-
self we allow the reading s to proceed to the next stage
of the process where it will be checked in the context
of the generated map, using Trait Verification. If nei-
ther of s’s immediate neighbours report a free-space
reading then the reading is discarded.
4.1.2 Trait Verification
Agreeability and acceptability deal with specular
readings in a bottom up fashion at the local level.
Specifically this is in the context of a single reading
set. As outlined above there are cases when the relia-
bility of readings cannot be determined from purely
considering the local view of the reading set from
which they originated. Therefore we also need to con-
sider the top down, global, perspective which takes
into account the environmental features determined to
date and recorded in the map being constructed. This
is the basis of the Trait Verification.
In its operation Trait Verification makes use of the fact
that environments contain structural regularities and
symmetries such as walls that can be approximated
using line segments. This is used as a basis for the
construction of two environmental views:
• V: A temporary sonar view which consists of
traits, or line segments, that can be estimated from
the current set of sensory readings.
• L: A local view which contains a history of the
line segments estimated from past sensory read-
ings. Line segments are maintained for an area
covering four times the perceptual field of the
robot along the path the robot has traversed.
L is used to form a hypothesis as to the probable state
of the environment from the robots current perspec-
tive. This is accomplished by extending L to cover
the current location of the robot using the historical
perspectives as a reference point.
Following this L and V are reconciled. Firstly, cer-
tainty values in the range 0 → 1 are calculated for the
readings that give rise to traits in V. This is accom-
plished through use of standard singular displacement
specifications presented in (Elfes, 1989).
Having determined certainty values in the readings, V
and L are reconciled. Two courses of action are ap-
plicable, depending on whether or not sufficient state
was available for L’s construction.
If enough state was not present to provide four per-
ceptual lengths centred on the oath traversed by the
robot, v
i
’s attributes are considered. v
i
is a trait in V
and its attributes relate to the reading(s) that gave rise
to the trait. For example the certainty associated with
the reading(s) or whether the reading(s) were previ-
ously flagged as potentially erroneous. If the reading
was flagged as potentially erroneous from the Accept-
ability/Agreeability and Trait Verification steps or the
reading certainty is below a determined threshold and
there is not an equivalent trait in L, where in this case
L has a size equivalent to maximum perceptual range
available, the reading is discarded.
If sufficient state was available L and V are compared
directly. If traits coincide in both views the readings
that gave rise to those traits are accepted, provided
that they have not been flagged as possibly erroneous.
If they have been flagged the attributes of the trait v
i
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
494

in V are considered. If two or more sensors agree on
the existence of the trait then the flagged reading is
accepted. If the trait was detected by a single sen-
sor the certainty value associated with that reading is
consulted. If the certainty is below the threshold the
reading is rejected. Otherwise it is accepted. If a trait
occurs solely in V and not in L then the attributes of
the trait are considered. If the flagged status and con-
fidence value of the reading(s) that gave rise to the
trait are acceptable, the reading is allowed to proceed
for further utilisation. The problem of a reading relat-
ing to a trait solely in L and not in V is dealt with in
the same manner.
4.2 Conform: Addressing Redundant
Information
To deal with the problem of redundant informa-
tion ConForM makes use of pose buckets (Konolige,
1997). With pose buckets a map has a dual repre-
sentation where each cell represents both the occu-
pancy of the area and the pose of readings that have
affected that cell. Therefore a record is maintained
stating whether a reading from a given distance and
angle has affected a particular cell. This means that
the first reading received from a specific pose will be
utilised, and all following readings from that pose for
this cell are discarded, as they merely duplicate infor-
mation already in the model.
4.3 Conform: Sensor Model
As per the original formulation, ConForM’s forward
model it also based on optimisation using the EM al-
gorithm (Dempster et al., 1977). It is a mixture model,
which accounts for the potential causes of a reading
(Thrun, 2003). A measurement may correspond to
the detection of an obstacle somewhere in the per-
ceptual field of the sensor, failure to detect any ob-
stacle thereby reporting freespace, or indeed, a ran-
dom fluctuation of a sensor. Each case has an associ-
ated probability. The model convolves these potential
causes and associated Gaussian noise into an amalga-
mated probability distribution which is subsequently
optimised by the EM algorithm to determine the most
likely cause of the received reading.
Our model differs from the original in that operates
on-line and in real-time. The on-line and real-time
use of the EM algorithm in ConForM is facilitated
through a two step approach. The first step consists of
explicitly dealing with potentially erroneous or redun-
dant information through Acceptability/Agreeability,
Trait Verification and Pose Buckets. As such the read-
ings available for the second stage encompass more
accurately the true state of the perceived environment
meaning that EM can be applied to a search space that
is tractable during real-time operation.
Using the EM algorithm to determine a map
1. Initialisation: Unlike traditional occupancy grid
mapping algorithms using inverse sensor models
EM does not estimate posteriors. Therefore maps
resulting from EM are discrete with each cell be-
ing either occupied or empty. As such the cells
in the map being constructed are initialised to an
occupancy of 0.5.
2. E-step: The E-Step calculates the expectations for
the potential causes of readings conditioned on the
map m and the current set of readings S.
3. M-step: The M-step assumes all expectations are
fixed and calculates the most likely map based on
these expectations. The probability distributions
calculated in the E-Step encapsulate all potential
causes of the readings in S when determining a
new map m. Maximisation of these distributions
are performed by hill climbing in the space of all
maps. The search is terminated when the target
function is no longer increasing.
4. Incorporating Uncertainty: EM calculates only a
single map not an entire posterior. An approxi-
mation which conditions the posterior on the map
generated by EM is utilised to incorporate uncer-
tainty into the map, thereby providing useful in-
formation for real-time operation.
5. Finally we integrate the map generated by EM
into the overall map using a Bayesian based in-
tegration.
5 EMPIRICAL EVALUATION
Real world and simulated environments were used to
empirically evaluate ConForM. The simulator used
was the Saphira architecture with the associated Pio-
neer simulator. For simulated experiments odometry
error was turned off so that wheel slippage would not
be a factor thus allowing us to focus on evaluating the
performance of the mapping paradigms in large cyclic
environments such as those illustrated earlier. For real
world experimentation we used relatively small office
environments purely for the reason that wheel slip-
page and thus odometric error is minimal over such
short distances.
IMPROVED OCCUPANCY GRID LEARNING - The ConForM Approach to Occupancy Grid Mapping
495
5.1 Benchmarking Technique
To evaluate the maps generated during our exper-
iments we use an extensible suite of benchmarks
which allow for the empirical evaluation of map
building paradigms (Collins et al., 2004; Collins et al.,
2005).
1. Correlation: As a generated map is similar to an
image it is possible to use a technique from image
analysis known as Baron’s cross correlation coef-
ficient (Baron, 1981) as a basis for evaluating the
map.
2. Map Score: This is a technique which calcu-
lates the difference between a generated map and
an ideal map of the environment (Martin and
Moravec, 1996).
3. Map Score of Occupied Cells This metric is simi-
lar to the previous one but only tests those cells in
the map that are occupied.
4. Path Based Analysis: To fully evaluate a gener-
ated map its usefulness to a mobile robot must be
considered.
• The degree to which the paths created in the
generated map would cause the robot to collide
with an obstacle in the real world, and are there-
fore invalid. False Positives.
• The degree to which the robot should be able to
plan a path from one position to the another us-
ing the generated map, but cannot. False Nega-
tives.
5.1.1 Determining an Overall Score
To allow an overall score to be determined we have
developed an amalgamation technique which can be
used to rank the overall performance of mapping
paradigms relative to each other as outlined in equa-
tion 2.
C
map
∈M
=
D
map
+ P
map
2
(2)
D
map
=
(1−MapScore
all
) + (1−MapScore
occ
) + B
n
300
P
map
= 1−
(FP) + (FN)
200
C
map
∈M
is the overall classification score obtained, M
is the set of maps generated in an experiment,
map
is a
particular map within the set of maps M. MapScore
all
and MapScore
all
are the normalised result from the
Map Score metrics, B
n
is the normalised Correlation
result. FP is the normalised False Positive result and
FN is the normalised False Negative result.
5.2 Results
In determining the performance of ConForM we em-
pirically evaluated it in relation to its peer mapping
paradigms, the original Forward Modelling paradigm
of Thrun (Thrun, 2003) and an on-line paradigm
from Konolige (Konolige, 1997) which has proven to
have the best performance of the inverse model based
paradigms (Collins et al., 2005).
Benchmarking consisted of completing a number of
data acquisition runs in the environments and using
this data in conjunction with the mapping paradigms
to generate the grid maps. Our experiment used four
differing environments, two simulated and two real
world, with three data acquisition runs being com-
pleted per environment. Therefore the results pre-
sented here are derived from evaluating a total of
thirty six individual grid maps. Table 5.2 presents the
amalgamated score for the mapping paradigms ob-
tained using the benchmarks outlined above. A larger
Table 1: Evaluating the ConForM approach to robotic map-
ping.
Mapping Paradigm Result
Moravec and Elfes 1985 0.67
Matthies and Elfes 1988 0.65
Konolige 1997 0.76
Thrun 2001 0.84
ConForM 0.87
evaluation recently completed and to be reported on,
which consisted of ten differing environments and
3600 individual maps, reported trends consistent with
those outlined here.
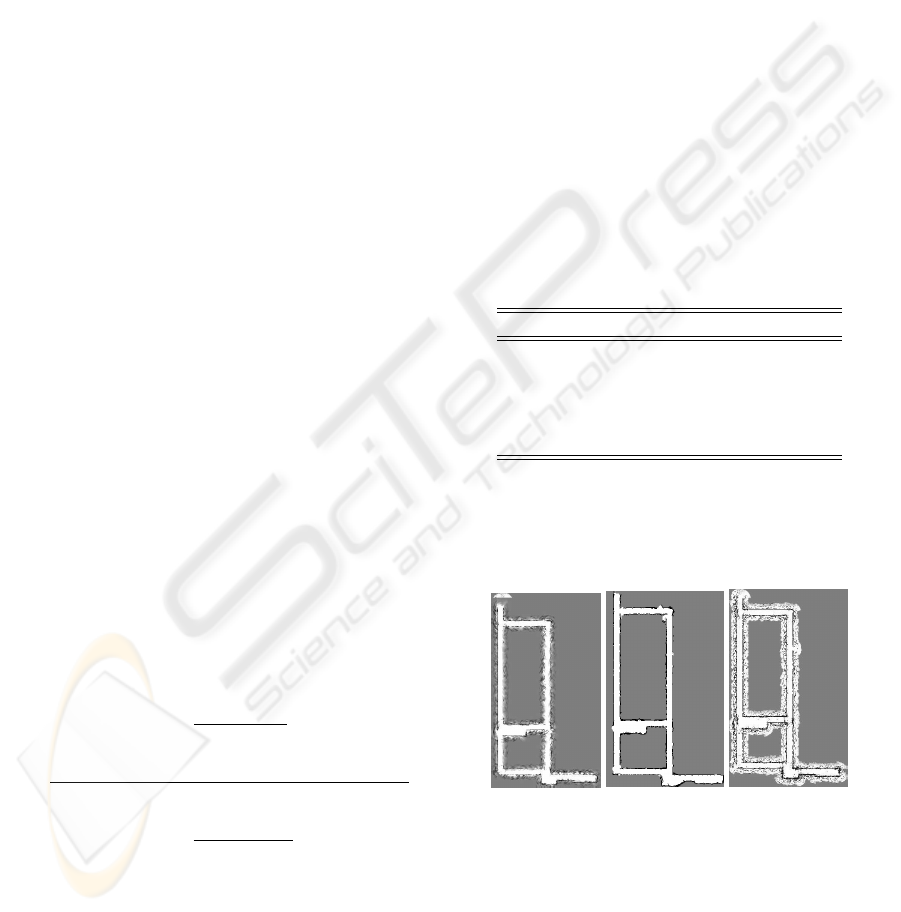
(a) Konolige
1997
(b) ConForM (c) Thrun 2003
Figure 2: Illustrative maps from the ConForM evaluation.
5.3 Analysis
Overall the results show that ConForM has outper-
formed the other approaches. ConForM outperforms
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
496

the inverse model based approaches because of its
improved sensor model and the manner in which it
tackles the problem of specularity in addition to its
use of pose buckets. In dealing with specularity,
the multi-faceted approach consisting of Acceptability
and Agreeability and Trait Verification is capable of a
finer reading set analysis when compared to inverse
model based approaches. This also has the knock-
on effect of making the operation of the pose buckets
more accurate as they suffer less from the problem of
spurious readings giving rise to false hypothesis re-
garding the perceived state of the environment.
ConForM outperforms the original Forward Mod-
elling approach because of its pro-active approach to
the problems of specularity and redundant informa-
tion. That original approach addressed the problems
of seemingly conflicting information through the EM
algorithm. The likelihood of the reading was evalu-
ated in a global context meaning that some localised
accuracy may be sacrificed. In ConForM the Forward
Model used considers the local perspective meaning
that it is capable of capturing and retaining more sub-
tle characteristics that may be dismissed in the offline
approach.
6 SUMMARY
Overall ConForM overcomes the problems inherent
in traditional approaches such as the need for assump-
tion of cell independence or the need for offline op-
eration. It also overcomes the issue of the existing
forward model approach not being applicable in an
on-line context. In addition it generates maps that
are more consistent then existing approaches. The ar-
eas for further consideration and research in relation
to ConForM include refining the threshold used with
trait verification, investigating the use of EM as a ba-
sis for refining already generated portions of the map
and investigating alternative EM formulations such as
Bayesian based approximations.
REFERENCES
Baron, R. J. (1981). Mechanisms of human facial recogni-
tion. In International journal of man machine stud-
dies, volume 15, pages 137–178.
Borenstein, J. and Koren, Y. (1991). The vector field his-
togram - fast obstacle avoidance for mobile robots.
IEEE Transactions on Robotics and Automation,
7(3):278–288.
Collins, J., O’Sullivan, S., Mansfield, M., Eaton, M., and
Haskett, D. (2004). Developing an extensible bench-
marking framework for map building paradigms. In
Proceedings Ninth International Symposium on Arti-
ficial Life and Robots, Oita, Japan.
Collins, T., Collins, J., O’Sullivan, S., and Mansfield, M.
(2005). Evaluating techniques for resolving redundant
information and specularity in occupancy grids. In AI
2005: Advances in Artificial Intelligence, pages 235–
244.
D. Kortenkamp, R. B. and Murphy, R. (1998). AI-based
Mobile Robots: Case studies of successful robot sys-
tems. MIT Press, Cambridge, MA.
Dempster, A., Laird, A., and Rubin, D. (1977). Maximum
likelihood from incomplete data via the em algorithm.
In Journal of the Royal Statistical Society, volume 39
of B, pages 1–38.
Dissanayake, G., Newman, P., Clark, S., Durrant-Whyte,
H., and Csorba, M. (2001). A solution to the simmul-
taneous localisation and map building (slam) problem.
In IEEE Transactions of Robotics and Automation,
volume 17, pages 229–241. IEEE.
Elfes, A. (1989). Occupancy Grids: A Probabilistic Frame-
work for Robot Perception and Navigation. PhD the-
sis, CMU.
Konolige, K. (1997). Improved occupancy grids for map
building. Autonomous Robots, (4):351–367.
Martin, M. C. and Moravec, H. (1996). Robot evidence
grids. Technical Report CMU-RI-TR-96-06, Robotics
Institute, Carnegie Mellon University, Pittsburgh, PA.
Matthies, L. and Elfes, A. (1988). Integration of sonar and
stereo range data using a grid-based representation. In
Proceedings of the 1988 IEEE International Confer-
ence on Robotics and Automation.
Moravec, H. and Elfes, A. (1985). High resolution maps
from wide angle sonar. In Proceedings of the 1985
IEEE International Conference on Robotics and Au-
tomation.
Murphy, R. R. (2000). Introduction to AI Robotics. MIT
Press.
Thrun, S. (2003). Learning occupancy grids with forward
models. Autonomous Robots, 15:111–127.
IMPROVED OCCUPANCY GRID LEARNING - The ConForM Approach to Occupancy Grid Mapping
497
