
CAMERA BASED HEAD-MOUSE
Optimization of Template-Based Cross-Correlation Matching
Tatiana V. Evreinova, Grigori Evreinov and Roope Raisamo
Department of Computer Sciences
FIN-33014 University of Tampere, Finland
Keywords: Video-as-input, Camera-mouse, Cross-correlation matching, Reduced spiral search, Text entry.
Abstract: There is a challenge to employ video-based input in mobile applications for access control, games and
entertainment computing. However, by virtue of computational complexity, most of algorithms have a low
performance and high CPU usage. This paper presents the experimental results of testing the reduced spiral
search with the sparse angular sampling and adaptive search radius. We demonstrated that a reliable
tracking could be provided in a wide range of lighting conditions with the relative brightness of only 16
pixels composing the grid-like template (the grid step of 10-15 pixels). Cross-correlation matching of the
template was implemented in eight directions with a shift of one pixel and adaptive search radius. The
algorithm was thoroughly tested and after that used in a text entry application. The mean typing speed
achieved with the head tracker and on-screen keyboard was of about 6.2 wpm without prediction after 2
hours practice.
1 INTRODUCTION
The latest mobile phones, PDAs and ultra-mobile
PCs are equipped with digital cameras. There is a
great challenge to employ video-based input in
mobile applications for access control (Face
Recognition, 2005), games and entertainment
computing (Ballagas, 2005), (Cantzler, 2003),
(YongBo, 2005), (EyeTwig, 2005), (TrackIR, 2006).
There are also multi-input techniques when video
input can be combined with touch and
tilt/acceleration sensors served by ultra-mobile PC.
To ascertain and recognize the tracked features,
most of the known algorithms are executed by
employing a lot of system resources being allocated
for video stream pre-processing (Comaniciu, 2002),
(Bérard, 1999), (Betke, 2002), (Brunelli, 1993),
(Crowley, 1995), (FaceMOUSE, 2005), (Jilin,
2005), (Kamenick, 2005), (Gorodnichy, 2004). Only
a few projects (Lewis, 1995), (EyeTwig, 2005),
(Kjeldsen, 2001), (Si-Cheng, 2005) have been
implemented to improve the input method and
optimise the algorithm to make the tracking
techniques more accessible and cheap. For instance,
EyeTwig head tracker has a good balance of
accuracy, CPU usage and a price (EyeTwig, 2005).
It was realized with the Intel Open Source Computer
Vision library (Intel “OpenCV”, 2006). To detect the
head position, a low CPU usage was achieved by
using minimal and non-specific criteria such as fast
ellipse fitting. Therefore, EyeTwig tracker has low
filtering efficiency to discriminate head movements
against an emergence and motion of another object
having a similar region and brightness in a capture
window.
Nowadays, the prices of web cameras are the
same as those of optical mice. The requirements for
video-based input techniques are not as high as, for
instance, for security applications (access control
and person identification). Video input may be
implemented by using various or combined
algorithms such as template- (or feature-),
knowledge-, and appearance-based methods. The
main goal is to provide smooth tracking of the body
features (e.g., a particular skin region). The
coordinates of the feature location in a capture
window might be transformed into a cursor position,
while the tracking algorithm should support
sufficient accuracy in pointing and selection of icons
and other widgets in the interface independently of
the lighting conditions and cluttered background.
Cross-correlation (CC) algorithm has been a
conventional approach in feature detection by
template matching in computer vision since the
507
V. Evreinova T., Evreinov G. and Raisamo R. (2007).
CAMERA BASED HEAD-MOUSE - Optimization of Template-Based Cross-Correlation Matching.
In Proceedings of the Second International Conference on Computer Vision Theory and Applications - IU/MTSV, pages 507-514
Copyright
c
SciTePress

1960’s. Several schemes to simplify and accelerate
computation of the cross-correlation for image
processing have been proposed, e.g., (Crowley,
1995), (Lewis, 1995). Nowadays, the method has
been used in machine vision for industrial inspection
(defect detection) as well as for real-time tracking of
the facial landmarks (Bérard, 1999), (Betke, 2002),
(Crowley, 1995), (FaceMOUSE, 2005), (Jilin,
2005). However, for real-time image feature
tracking there is not an agreement on which specific
parameters and a way of processing are better
concerning the balance of the computational costs
and a reasonable reliability. It can be shown that
there is a potential to optimise CC to perform video
tracking with reasonable efficiency for a variety of
interaction tasks. Below we will present further
improvements in the CC algorithm that can speed up
template matching and free CPU resources.
2 DESIGNING THE CC METHOD
Facial landmarks can be considered as a relatively
rigid surface having near-equal brightness within a
small field as 0.2-0.5% of the entire face image.
That is, a surface area of 12×12 pixels may not have
a significant brightness gradient in many regions
within a frame of 320×280 pixels. A template having
a size of about 1.5-2.5% of the entire face image,
that is, composed of about 1600-2300 pixels, might
have many dissimilar spots.
Guided by this reasoning, we have considered
optimising the size of the skin region and the
number of dots (pixels) which compose the template
that has to be matched and tracked. These dots have
two basic parameters: the coordinates and
brightness. Brightness is a more general parameter
than colour that may vary significantly depending on
the type of the lighting and reflection conditions. As
a signature of the image region, these dots should
compose an array having unique features, if it is
possible. They can be selected, for instance, as a
rectangular grid with a fixed step along X-axis and
Y-axis presenting the unique gradient of brightness,
or vice versa, the template can present a particular
layout of dots with near-equal brightness. The
connected dots having a similar brightness and being
localized in some distances can present the unique
pattern as well. On the other hand, the higher are
requirements to the template detection and matching,
the greater are demands to the lighting conditions.
The absolute brightness of each dot (pixel) for 8-
bit grey level images can vary in a range of 0-255.
While a phase of varying the brightness of the
connected dots in rows and columns of the grid-like
template remains almost the same at the head
movements within a small area, for example, yaw at
less than ±20 degrees and pitch at about ±15
degrees. It can be shown that correlation between
two samples calculated on the relative brightness of
their dots is the same as that which is being
calculated with the absolute brightness. By the
relative brightness, we assign a difference between
brightness of any pixel minus the mean brightness
over all pixels in the template (B
i
− B
ave
). Still, the
correlation calculated on the relative brightness is
less sensitive to changes in image intensity with
different lighting conditions (Lewis, 1995).
We carried out a study with different sizes of the
template (from 10×10 to 50×50 pixels) composed of
different numbers of pixels (from 225 to 12). We
found that the 16-pixel array being arranged as a
rectangular grid within the image region with a side
of 40-48 pixels gives us an opportunity to choose
relatively unique areas in the human face. Such a
template can be tracked efficiently, that is, template
matching can occur with a correlation of about 95%
with a minimum number of failed records.
Next, we have proposed to reduce the full
computation of correlation (Bérard, 1999), (Betke,
2002), (Lewis, 1995) over the particular search area
to the restricted field through reduced spiral search
with the sparse angular sampling starting from the
initial location where the template was stored. We
did an extensive evaluation of all variables of the
proposed algorithm, which might be minimized
without performance degradation (Evreinova, 2006).
As a criterion of the algorithm performance (and the
best values), we used the radius of a search area and
the time of computation needed to detect a sample
which resembles the template with the maximum
correlation. An assessment was made for 3, 4, 6, 8
and 16 directions (with an angular step of 120-22.5
degrees) and the different radius of a search area that
varied from 1 to 40 pixels.
In particular, we found that the search area might
be processed only in eight directions with the
angular step of 45 degrees around the starting point
and the radius of a search area can be less than 20
pixels. Thus, the search area presented the rectangle
each side of which was by 40 pixels greater than a
side of the template. When the sample captured
regarding the starting point, for instance the top left
pixel, had the highest correlation coefficient among
all samples recorded within the search area,
coordinates of such a point were selected as the new
starting point for the next search in the new capture
window.
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
508


to the initial location where the
template was initialised; GoTo (1).
Throughout the tracking, matching is always
performed regarding the same template (the relative
brightness of 16 pixels). Still we cannot exclude the
previous location from computation as it is
impossible to predict a new position of the template
even within 10 ms. When all of the sample
candidates within the maximum capture radius failed
(step 7 in the algorithm), for instance, when the
correlation coefficient was less than the predefined
threshold 0.8, the search started again from the
starting point where the template was stored
initially. To facilitate a spatial synchronization of the
tracking process the user has to follow the initial
head position. In general, the failed records occur
when a sample crosses the borders of the working
area or/and it is impossible to calculate the
correlation beyond the range of the predefined
parameters. Nevertheless, a reset of the template
(recalibration) was never required.
The region between or near eyebrows is
considered as the best facial landmark for video
tracking having a sufficient brightness gradient
(Bérard, 1999). The movements of the facial
landmark were recorded with the Logitech
QuickCam camera from the distance of about 75 cm.
Normally, the template had a size of 48×48 pixels
and it was always comprised of only 16 pixels
(layout 4×4, the grid step of 15 pixels). The part of
160×120 pixels of the image format 320×240 pixels
was centered and zoomed accordingly. In
comparison to the raster-like matching carried out
throughout the overall search area with the shift of 1
pixel, the reduced spiral search with the sparse
angular sampling can decrease by 8.9-2.2 times
redundant data. When R=20, a ratio of a number of
computations is (40×40)/(20×9)≈8.9, when R=5, a
ratio is (10×10)/(5×9)≈2.2.
Finally, employing Microsoft Video for
Windows (VfW) and API functions that enable an
application to process video data take different time
and affect the tracking performance. To grab an
image from the hidden capture window we used an
intermediate DIB (Device Independent Bitmap) file
of the capture window 320×240 pixels stored by
sending WM_CAP_FILE_SAVEDIB message. It
takes of about 1.2 – 2.5ms for Intel Pentium 4
3201.0 MHz Cache 2MB and AMD Athlon
Processor 858.8 MHz, Cache 256kB accordingly,
and the same time is needed to convert DIB to BMP
format (76kB, 320×240 pixels, black and white with
8-bit greyscale) and to load the image from the file.
The template-based tracking performance depends
on how the algorithm and methods are integrated
with other procedures. In this case, a number of
computations can be optimised as well (Lewis,
1995).
As a lighting source, we have used luminescent
lamps. Besides other features, the minimum
correlation threshold 0.8 makes the input technique
tolerant to head rolls (tilts) in a range of about ±18
degrees. It was sufficient to support head tracking
when lighting conditions varied in a wide range of
brightness with a minimum of failed records.
Figure 2: The variation of correlation in the target acquisition in nine locations within the working area of 80×60
pixels when brightness of the lighting source was changed gradually. The bottom figures correspond to the
average brightness of the sample, the template was stored at the middle level of lighting.
35 of 255 147 of 255 228 of 255, where 255 is white
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
510

Fig. 2 illustrates the algorithm tolerance to the
lighting at the target (12×12 pixels) acquisition
(direct pointing) in nine locations within the working
area of 80×60pixels when brightness of the lighting
source was changed gradually by more than six
times (with the help of an electronic regulator). Each
dot of the sample in Fig. 2 is shown as a square
having the width and the height which are
proportional to the grid step of 15 pixels in the
template layout.
To support head tracking in full screen size we
did a preliminary study of possible instability of the
system. In particular, correlation coefficient may
change due to sparse angular sampling, errors in
computation (rounding), lighting and other non-
controlling factors. The system noise had a random
variation of correlation within a range of about 0.035
(STD=0.006) and an area with a radius of about one
pixel (STD=0.00). The mean of Corr.max recorded
was of about 0.999 (STD = 1.24). The drifting of the
maximum correlation was also recorded (on 1000
counts) at neutral head position. It was of about 1.08
pixels (with a minimum of 1 pixel, a maximum of 7
pixels, STD=0.48). It can be considered as a
physiological noise (tremor-like micromovements).
Displacements of the start point may occur with
equal probability in any of eight directions when no
involuntary movements were produced.
Drifting of the output coordinates can be
decreased through moving average procedure to
stabilize displacements of the starting point
(⎯Dst.pt.) that should be converted into the location
of the cursor (⎯Pcurs.) in the application program.
However, an averaging on five and more pixels
(including tremor and spastic movements) has a
negative impact on cursor movements (“sticky” or
delayed cursor etc.). To make the cursor movements
smooth and to avoid the problem of the sample
drifting the coordinates of the referent point were
averaged on three-four locations and translated into
the cursor relative displacement using power
function with index K
3
=2.0-2.4 (acceleration factor).
The higher cursor acceleration is used the smaller
head movements are needed to access any location
within a screen. At a small cursor displacement, we
used a threshold index K
2
=0-0.35 to block
acceleration of small involuntary movements (noise
reduction). That demands less accuracy for the
acquisition of small targets. Speed of cursor
movements can also be adjusted as index K
1
=1.7-
2.5. Thus, cursor displacement transfer function is
calculated as a vector ⎯Pcurs.:
⎯Pcurs. =⎯P’curs. − (K
1
×⎯Dst.pt. +K
2
)^K
3
(1)
where ⎯P’curs. is previous cursor position.
Such a function (1) with moving average of
displacements (⎯Dst.pt.) on 3-4 points requires few
computations. For instance, Kjeldsen (2001) had
explored application of head gestures for cursor
positioning, continuous control of sound, spatial
selection and symbolic selection (by yaw/no and
pitch/yes). The author described a hybrid algorithm
for facial pointing which take into account sensing
constraints and computational efficiency. One of the
key features was a sigmoid-based transfer function
which combined head velocity and position to
improve cursor control. Earlier Bérard (1999) also
used exponential function to better adjust scrolling
speed depending on head displacements.
3 EVALUATING TEXT ENTRY
WITH HEAD-MOUSE
Seven volunteers from staff and students at the local
university were recruited for this study. This group,
which consisted of 4 females and 3 males, covered
an age range from 27 to 50 years. None of the
participants had any previous experience with head-
mouse text entry, and three of them participated in
the experiments with eye typing. Three of the
subjects wore prescription glasses.
The critical parameters of software were
preliminarily tested with a different CPU as
mentioned in Section 2. The text entry tests were
carried out on a PC with Intel Pentium 4 CPU. The
monitor used 19” AL1931 ACER had a resolution of
1024 × 768 pixels. Logitech QuickCam Pro 3000
had a frame rate of 30 fps. The test program was
written in Microsoft Visual Basic 6.0.
The head-mouse testing of text entry method was
performed with the Standard 101-key Microsoft On-
Screen Keyboard (OSK_QW) having the regular
QWERTY layout. Fig. 3 illustrates a snapshot of the
setup. The data were recorded after the preliminary
training phase. The subjects were trained in the use
of the head-mouse and text entry techniques during
4 days, but no more than (6) trials per day, 2 hours
(4368 characters) in a total.
Each trial consisted of entering twenty words,
randomly selected from a set of 150 words, and
displayed one at a time in the test window located
above the notepad (Fig. 3). The test words were 7 to
13 characters in length, with a mean of about 9, and
every letter of the alphabet was included at least
several times during the trial.
CAMERA BASED HEAD-MOUSE - Optimization of Template-Based Cross-Correlation Matching
511

In order to record the time per character equally,
a timer was started when the virtual space bar was
pressed and stopped when a correct character was
entered. When the last character of the word was
entered, the test was stopped, and the next word to
be entered appeared in the test window after a delay
of 3 seconds. Each of the subjects accomplished
eleven trials in a one-hour session.
A physical button, the Control key was used to
make a selection of any software button instead of
dwell-time. When the cursor position was outside of
the onscreen keyboard the same key was used to
start and stop the camera control.
Figure 3: A snapshot of the software used in the
experimental setup: test window (top), Notepad (middle)
and OSK_QW (bottom).
4 RESULTS OF EVALUATING
TEXT ENTRY
Statistical data were obtained for 7 subjects entering
20 words in 11 trials, for an estimated 14014
characters in total. The key figures such as the
number of errors per trial, the entry time per
character and per word, and the number of
keystrokes per word were stored for each trial in a
data array and saved in a log file.
Fig. 4 illustrates the grand mean and standard
deviation of the entry time needed to point and select
any character (software button) using the head-
mouse built on the improved algorithm described in
Section 2 and a single physical key to make a
selection.
The total summarized relative frequency of the
characters used during the test is shown in the
bottom of the Fig. 4. The correlation of relative
frequency of the characters used during the test with
English letter frequency was of about 0.985.
Fig. 5 shows the total error rate as a percentage
of errors committed. It illustrates that the average
error was of about 4.53% (STD = 3.57) without any
prediction or text entry optimisation while making
use of Microsoft on-screen keyboard. The entry of
some often-used characters was less erroneous than
others because the probability of their occurrences
was higher, and rarely used characters have lower
frequency of emerging. Therefore, the percent of
error was higher due to a small number of such
events.
0
0.5
1
1.5
2
2.5
3
3.5
ETNR I OAS DLCFPUMG HYWVBXKQJZ
Entry time per char., s
Figure 4: The grand mean for typing speed per character (and STD) with Microsoft OSK. The total summarized relative
frequency of the characters used is shown in the bottom (%).
67.7% 26.1% 6.2%
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
512
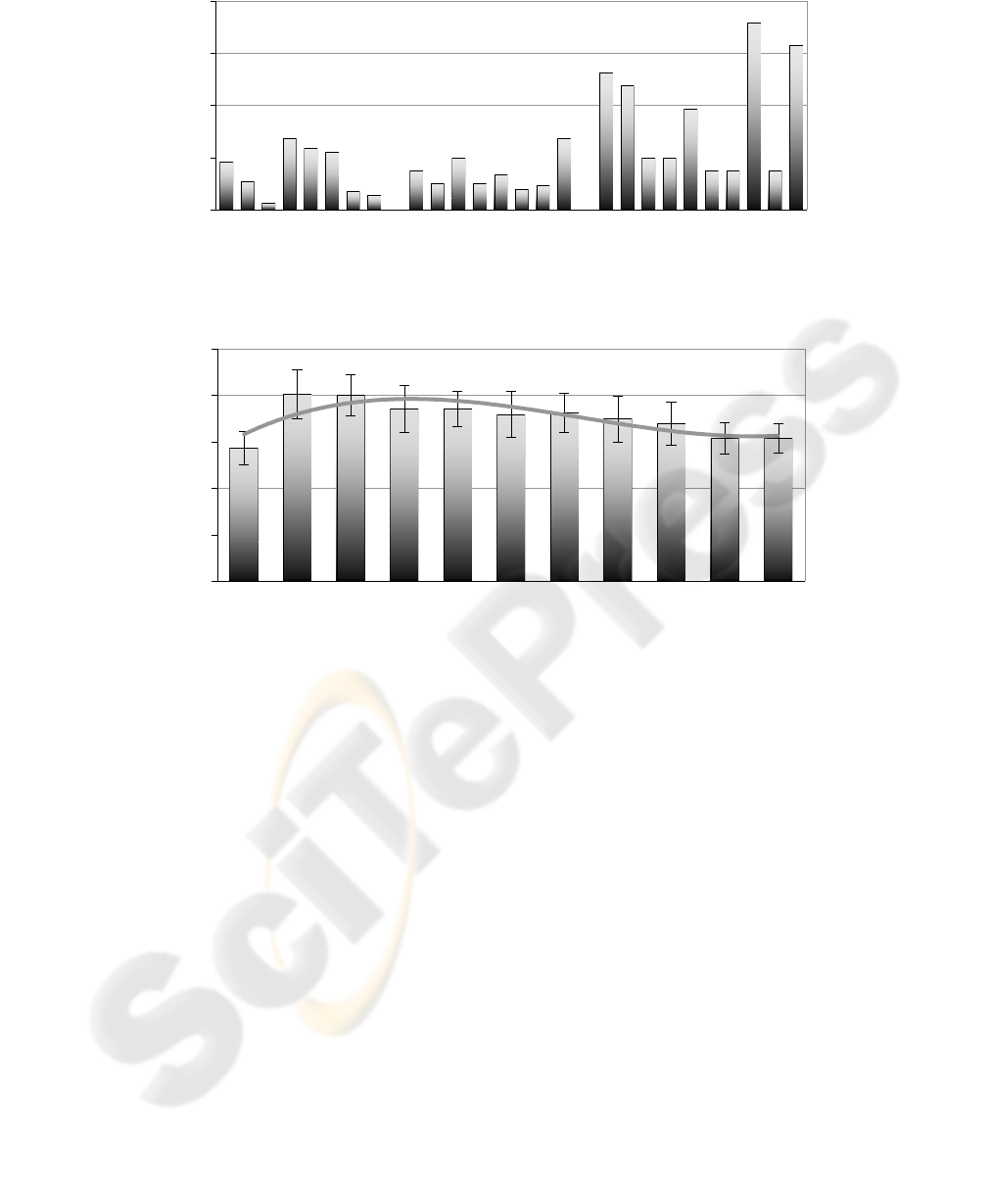
Figure 5: The total error rate summarized over 1540 words and committed by all the participants.
Figure 6: The grand mean for entry time of the whole words (and STD).
The average performance of the subjects can be
measured as the mean time of the word entry (Fig.6).
The average typing speed was of about 17.6 s
(STD=9.1 s) per word (at the mean of 9.1 characters
per word) that translates into 6.2 wpm (STD=3.21
wpm) based on the average length of 5 characters
per word in English. The trend line indicates a
normal performance variation during the test which
took about one hour. In spite of the fact that nobody
reported any problems with neck muscles, extreme
fatigue or pain, the subjects had a rest of about 2
minutes after each trial (20 words) which could be
completed in about 3 minutes. For instance, Hansen
(2004) reported a typing speed of about 6.22 wpm,
with the error rate of 14%, on the data being
averaged on 30762 characters. The “Smart-Nav™”
hands free mouse (from “Natural Point”) and a
dynamical Danish on-screen keyboard with word
prediction/completion mode were used for testing.
Nevertheless, the size of software buttons
OSK_QW keyboard was 9mm × 9mm, while the
Danish keyboard occupied full screen, and the size
of each button was 8×8 cm. The size of the software
buttons has an impact on the usability factor such as
the user satisfaction. The higher demands to head
movement accuracy is the higher tension of the neck
muscles could occur during voluntary head tracking.
On-screen keyboard is just an input interface which
should take a minimum space of the desktop.
5 CONCLUSION
We demonstrated that the information provided by
the grid-like template through relative brightness of
16 pixels (layout 4×4, grid step 15 pixels) is
sufficient for tracking a facial landmark in various
positions at the correlation threshold more or equal
to 0.8. After completing a series of extensive
0
4
8
12
16
ETNR I OAS DLCFPUMG HYWVBXKQJZ
Errors per char., %
0
5
10
15
20
25
1234567891011
Trial, n
Time per word, s
CAMERA BASED HEAD-MOUSE - Optimization of Template-Based Cross-Correlation Matching
513

experiments, we concluded that when the
rectangular template has a side of 40-48 pixels, a
capture radius of 20 pixels is enough to hold failed
records at a minimum. Moreover, we proposed the
enhanced cross-correlation algorithm with the
adaptive search radius which provides the maximum
degree of similarity, more than 0.95, between
tracked region and the template. The matching
procedure was improved and it is implemented in
eight directions based on the reduced spiral search
with the sparse angular sampling and shift of one
pixel. Such an improvement of cross-correlation
algorithm decreased the number of computations by
8.9-2.2 times in a comparison to raster-like matching
when the sample candidate has to be checked
throughout the overall search area with a minimum
consequent displacement. The improved algorithm
has a good performance employing the minimum PC
resources for computation, 8-15% with Intel
Pentium 4 CPU. Finally, the head-mouse application
was tested with processor Pentium II 351.5MHz,
Cache 512Kb, RAM 130Mb running under
Windows 2000. It took of about 40-65% of the PC
resources at the frame rate of 30 fps.
The tests with able-bodied participants showed
the average typing speed of about 6.2 wpm with text
entry technique after two-hour practice of the use of
head-mouse. In the further development, we plan to
increase the number of applications and features
which could be adaptive.
ACKNOWLEDGEMENTS
This work was financially supported by the
Academy of Finland (grant 200761 and 107278),
and as a part of the project SKILLS (FP6-035005)
funded by the EU Commission.
REFERENCES
Ballagas, R., Rohs, M., Sheridan J.G., 2005. Mobile
Phones as Pointing Devices. In Proc. of the Workshop
on Pervasive Mobile Interaction Devices (PERMID) at
PERVASIVE 2005, Munich, Germany, 27-30.
Bérard, F., 1999. The perceptual window: Head motion as
a new input stream. In IFIP Conference on Human-
Computer Interaction (INTERACT99). IOS Press.
Betke, M., Gips, J. and Fleming, P., 2002. The Camera
Mouse: Visual Tracking of Body Features to Provide
Computer Access For People with Severe Disabilities.
IEEE Transactions on Neural Systems and
Rehabilitation Engineering 10:1, (2002) 1-10.
Brunelli, R., Poggio, T., 1993. Face recognition: features
versus templates. IEEE Trans. Pattern Analysis and
Machine Intelligence, Vol. 15, No. 10, 1042-1052.
Cantzler, H. and Hoile, C. 2003. A novel form of a
pointing device. In Vision, Video, and Graphics, 1-6.
Comaniciu, D., Ramesh, V., Meer P., 2002. Real-Time
Tracking of Non-Rigid Objects using Mean Shift.
IEEE Conf. Computer Vision and Pattern Recognition
(CVPR'00). Vol. 2, 142-149.
Crowley, J.L., Berard, F. and Coutaz J., 1995. Finger
Tracking as an Input Device for Augmented Reality.
Int. Workshop on Face and Gesture Recognition.
(IWAFGR'95), Zurich, Switzerland.
Evreinova, T.V., Evreinov G., Raisamo, R., 2006. Video
as Input: Spiral Search with the Sparse Angular
Sampling. In Proc. of ISCIS 2006. LNCS 4263,
Springer-Verlag Berlin Heidelberg, 542 – 552.
Face Recognition comes to Mobile Devices, 2005, at:
http://www.mobilemag.com/content/100/102/C3799/
FaceMOUSE. Product information, 2005, at:
http://www.aidalabs.com/
Gorodnichy, D.O., Roth, G., 2004. Nouse ‘use your nose
as a mouse’ perceptual vision technology for hands-
free games and interfaces. Elsevier B.V. Image and
Vision Computing 22, 931–942.
Hansen, J.P., Johansen, A.S., Torning, K., Kenji Itoh and
Hirotaka Aoki, 2004. Gaze typing compared with
input by head and hand. In Proc. of ETRA ‘04, Eye
Tracking and Research Applications Symposium,
ACM Press, 131-138.
Jilin Tu, T. Huang, T, Hai Tao, 2005. Face As Mouse
Through Visual Face Tracking. In Proc. of the 2nd
Canadian Conf. Computer and Robot Vision, IEEE
Computer Society, 339-346.
Kamenick, T., Koenadi, A., Zhi Jun Qiu, Sze Yeung
Wong, 2005. Webcam Face Tracking. CS540 Project
Report, Available at:
http://www.cs.wisc.edu/~jerryzhu/cs540.html
Kjeldsen, R., 2001. Head Gestures for Computer Control.
In Proc. of IEEE ICCV Workshop on Recognition,
Analysis, and Tracking of Faces and Gestures in Real-
Time Systems, IEEE Computer Society, 61–68.
Lewis, J. P., 1995. Fast Template Matching. J. Vision
Interface. 120-123.
Intel Image Processing library “Open CV”. Website 2005
http://www.intel.com/technology/computing/opencv/o
verview.htm
Product information on EyeTwig.com. Website 2005.
http://www.eyetwig.com
Product information on TrackIR. Website 2006.
http://www.naturalpoint.com/
Si-Cheng Zhang, Zhi-Qiang Liu, 2005. A robust, real-time
ellipse detector. J. Pattern Recognition 38, 273 – 287.
YongBo Gai, Hao Wang, KongQiao Wang. 2005. A
Virtual Mouse System for Mobile Device. In Proc. of
the 4th international conference on Mobile and
ubiquitous multimedia. ACM Int. Conference
Proceeding Series; Vol. 154 MUM, 127-131.
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
514
