
ROBUST SKYLINE EXTRACTION ALGORITHM FOR
MOUNTAINOUS IMAGES
Sung Woo Yang, Ihn Cheol Kim and Jin Soo Kim
3-1-2, Agency for Defense Development, Yuseong P.O. BOX 35, Daejeon, Republic of Korea
Keywords: Skyline extraction, mountainous images, canny edge images, skyline candidate pixel.
Abstract: Skyline extraction in mountainous images which has been used for navigation of vehicles or micro
unmanned air vehicles is very hard to implement because of the complexity of skyline shapes, occlusions by
environments, difficulties to detect precise edges and noises in an image. In spite of these difficulties,
skyline extraction is a very important theme that can be applied to the various fields of unmanned vehicles
applications. In this paper, we developed a robust skyline extraction algorithm using two-scale canny edge
images, topological information and location of the skyline in an image. Two-scale canny edge images are
composed of High Scale Canny edge image that satisfies good localization criterion and Low Scale Canny
edge image that satisfies good detection criterion. By applying each image to the proper steps of the
algorithm, we could obtain good performance to extract skyline in images under complex environments.
The performance of the proposed algorithm is proved by experimental results using various images and
compared with an existing method.
1 INTRODUCTION
Skyline extraction is similar to a segmentation
problem which partitions the image into the sky and
non-sky areas. The skyline extraction in mountain-
ous images is very useful in that we can obtain many
local spatial features from skyline that hardly change
even though time goes by. It is used for navigation
of vehicles or micro unmanned air vehicles (Ettinger
et al., 2002; Messi, 2003; Truchetel, 2006). And it
can also be used for rendering cartographic data,
rendering self-shadowing textures, accelerating
flight simulation, visualizing scientific data, path
planning to avoid detection etc (Stewart, 1998). But
it is very difficult to extract skyline from moun-
tainous images because of compexity and diversity
of the skyline and influence by the noise caused by
complex environments. Clouds, fog and backlight by
the sun in an outdoor environment make the skyline
ambiguous. And they also make it hard to extract
skyline. Because of these difficulties, skyline extra-
ction in mountainous images is one of the most
difficult problems to solve in computer vision fields.
There are two approaches to skyline extraction. One
is region-based approach which uses the
characteristics of images that the sky often occupies
the upper part of an image (Fang et al., 1993; Stein
el al., 1992; Cozman et al., 1997, 2000). And the
other is edge-based approach which uses the fact that
skyline can be regarded as a boundary between two
distinctive regions (Talluri and Aggarwal, 1992; Lie
et al.,2005; Woo et al., 2005).
The approach proposed in Fang et al.’s work (1993)
uses the threshold to find the skyline. They calculate
the threshold using ten small sub-windows and the
contrast of the image. After the threshold is
determined, a vertical-line search from top to bottom
is performed. Then, the pixels whose intensity is
below the threshold are determined as skyline. Their
approach has weak robustness when the image has
complex environments, such as clear clouds above
the skyline. Cozman et al.’s approach(2000) also
uses vertical-line search. However, they use the
smoothed intensity gradient image. This approach
also has the drawback of weak robustness for
complex environments. In the Stein et al.’s work
(1992), they find the skyline using the segmentation
method which segments the sky and the ground. But
they don’t mention the crucial segmentation step,
and general segmentation methods have a limitation
to find exact skyline. Talluri and Aggarwal(1992)
use gradient value to extract the skyline based on
edge-based approach. But their approach is too
simplified to be applicable to complex images. A
more practical approach is advocated by Woo et al.
(2005) and Lie et al.(2005). They also use edge-
based approach. In Woo et al.’s work, they use
Dynamic Programming using contrast cost and
253
Woo Yang S., Cheol Kim I. and Soo Kim J. (2007).
ROBUST SKYLINE EXTRACTION ALGORITHM FOR MOUNTAINOUS IMAGES.
In Proceedings of the Second International Conference on Computer Vision Theory and Applications - IFP/IA, pages 253-257
Copyright
c
SciTePress

homogeneity cost. In Lie et al.’s work, they use DP
utilizing edge image, vertex cost and link cost.
Unfortunately, DP has its limitation to extract
skyline in that false skyline can be extracted due to
the dependence on cost equation. A skyline candi-
date point is essential for using DP but the papers
don’t provide exact method to find it.
In this paper, we combine region-based and edge-
based approach to extract skyline. The paper
contains two fundamental contributions. The first is
that this research presents the solution to the problem
of extracting skyline using two-scale canny edge
images. The second is the development of robust
algorithm to extract skyline using the advantages of
each canny edge images, the characteristics of the
images and a proper linking algorithm. Detailed
steps and experimental results are explained in the
following sections.
2 TWO-SCALE CANNY EDGE
IMAGES
Canny edge detector (Canny, 1986) is one of the
most useful edge detectors in today’s computer
vision community and it is optimal in a mathematical
sense. In spite of these good reputations, it is not
adequate for skyline extraction. Because it has
Localization-Detection Tradeoff (Trucco and Verri,
1998; Forsyth and Ponce, 2003). Good detection
means the detector must minimise the probability of
false positives. Good localization means that the
detected edges must be as close as possible to the
true edges. Optimal edge detector must satisfy both
criteria but canny edge detector cannot improve both
criteria simultaneously. It depends on the smoothing
filter’s scale:
x
σ
,
y
σ
and threshold values at the
Hysteresis Thresholding step in canny edge dete-
ctor:
h
τ
,
l
τ
. By adjusting these parameters, we can
improve only one criterion, either good localization
or good detection.
We cannot improve two criteria simultaneously.
However, if we use each criterion in proper steps, we
can obtain the same effect as improving both criteria
simultaneously. So we make two-scale canny edge
images. The first image satisfies good detection
criterion. And the second image satisfies good
localization criterion.
Figure 1 explains two sale canny edge images. We
can obtain the center images of the Fig. 1 by setting
the four parameters
)(
lhyx
τ
τ
σ
σ
as (4, 4, 20, 1)
and the right images by setting them as (3, 3, 5, 0).
We can find out that the right images have more
detailed edge segments than the left images. We will
define the left image as High Scale Canny edge
image and the right image as Low Scale Canny edge
Figure 1: Three sample images in our image database and the corresponding two-scale canny edge images.
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
254
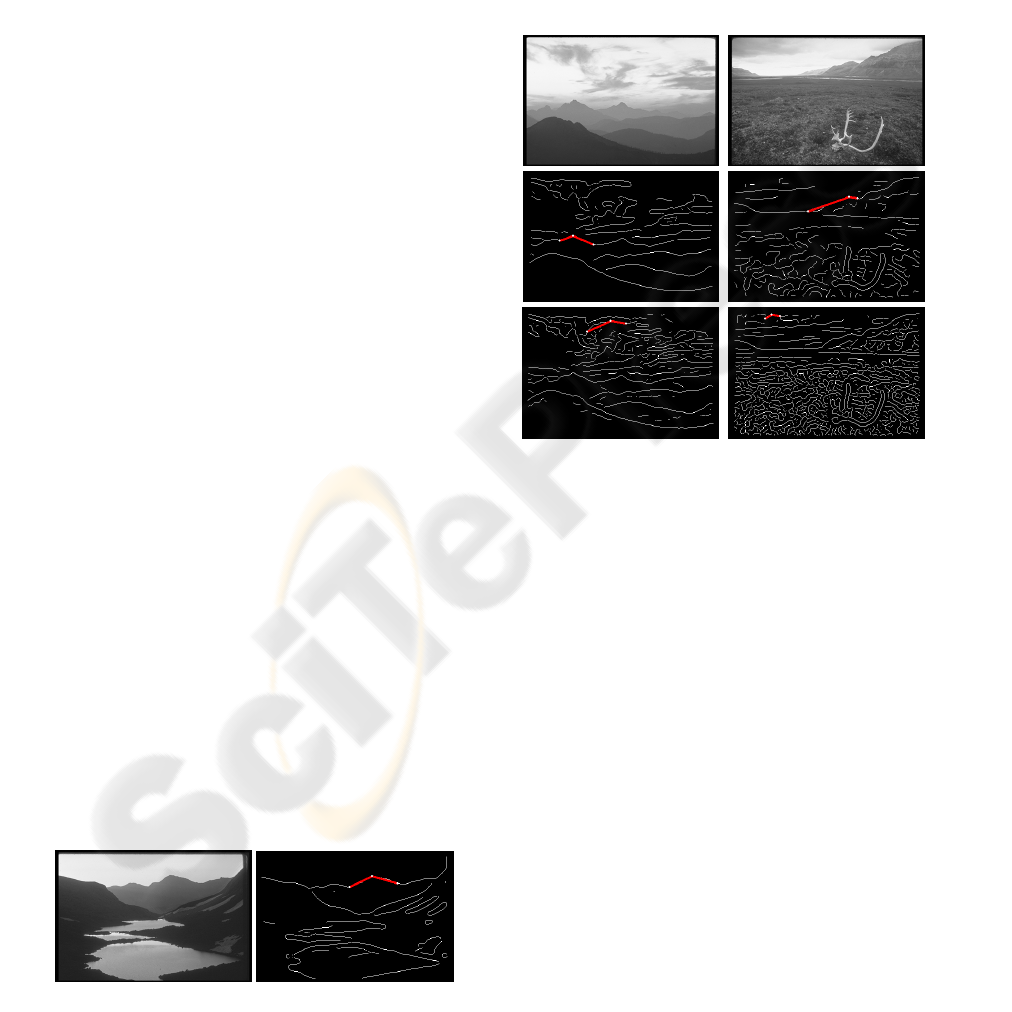
image. We will use High Scale Canny edge image
for the processes which require good localization
and Low Scale Canny edge image for good detection.
3 SKYLINE EXTRACTION
In this section, we introduce skyline extraction
algorithm using two-scale canny edge images. There
are two steps for skyline extraction. The first step is
the seed selection and the second is skyline search.
The seed is a definite point that we can think as a
skyline candidate point. From this point, we can
search the whole skyline using feasible search
algorithm. In the subsequent sections, we explain
detailed procedures.
3.1 Seed Selection
We need to find the skyline from many edge
segments in the canny edge image. For this, we look
for a definite skyline candidate point at first. We use
the topological information that skyline in the
mountainous image has a breakpoint at top of a
mountain, and the location of the skyline in an image
which may occupy the upper part of an image.
To find the breakpoint, we use a maximum point and
two local minimum points of an edge segment. We
define a maximum point as a point that has the
highest y position in an edge segment. From the
maximum point, we search an edge segment. A first
point that has the minimum y position is the local
minimum point. We can get two local minimum
points from left and right side of the maximum point.
We can make two lines from maximum point to left
local minimum point, and from maximum point to
right local minimum point. Joint angle between these
two lines determines validity of the seed point.
Considering the fact that the skyline usually pose in
upper part of an image, we search the canny edge
image from top to bottom and select a first maxi-
mum point of an edge segment that satisfies the
specific joint angle as the seed. We process this step
in High Scale Canny edge image. Fig. 2 shows the
seed selection. Three white dots in the image mean
left local minimum point, the maximum point and
the right local minimum point.
Figure 2: The example of seed selection.
We can observe advantages of adopting High Scale
Canny edge image for finding the seed. High Scale
Canny edge image only has strong edges that have
high gradient values. So if there are not strong noises
in the sky, for example thick clouds, there are not
severe noises enough to disturb finding the seed in
High Scale Canny edge image. If we use Low Scale
Canny edge image, we may not find the appropriate
seed. Fig.3 shows this situation. The first row is the
original images. The second row is the seed found in
High Scale Canny edge image and the third row is
the seed found in Low Scale Canny edge image.
Figure 3: Seed selection using High Scale Canny edge
image: the second row, and Low Scale Canny edge image:
the third row.
The disturbance of the noises that exists even in
High Scale Canny edge image can be overcome by a
simple verification step. Using the found seed, we
search the skyline. If the length of the extracted
skyline is below specific threshold, we decide that
this seed is not adequate, and find other seed from
that position. In this way, we can find the pertinent
seed.
3.2 Skyline Search
We start to search whole skyline from the seed found
in previous stage. Skyline search is processed along
an edge segment of the seed exists, and at first we
search the right side of the seed. We search right 5-
neighbor of the seed. If there is an edge pixel in this
region, we set this point as a skyline candidate pixel.
If there is no edge pixel, we search additional 9-
neighbor of the seed. Fig. 4 explains skyline search
algorithm. Black pixels are the skyline candidate
pixels and dashed boxes show 5-neighbor and
ROBUST SKYLINE EXTRACTION ALGORITHM FOR MOUNTAINOUS IMAGES
255
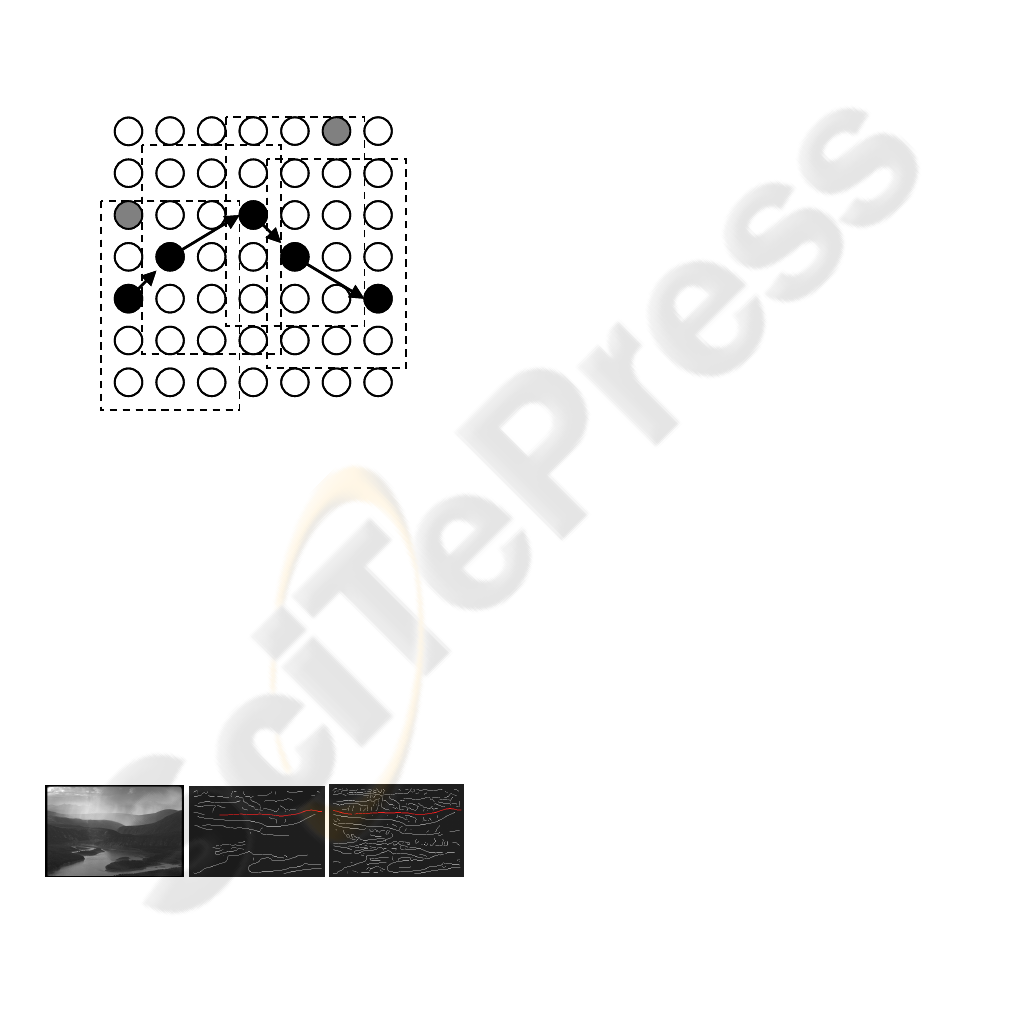
additional 9-neighbor of the skyline candidate points.
Grey pixels in the dashed box are not selected as
skyline candidate pixels because additional 9-
neighbor search is followed by 5-neighbor search. If
we find an edge pixel in 5-neighbor, we do not
search additional 9-neighbor. This procedure makes
the skyline search algorithm more accurate. If there
is not a skyline candidate pixel, we search reason-
able area around previous skyline candidate pixel.
When there is an edge pixel, we continue the search
process from this pixel. If we cannot find a pixel in
this area, we think that the last skyline candidate
pixel is the end of the skyline, and stop the search
process. Search process is equally done on the left
side of the seed.
Figure 4: Skyline search using 5-neighbor and additional
9-neighbor of the skyline candidate points.
Skyline search is processed in Low Scale Canny
edge image. It is not proper for the seed selection but
for skyline search. Because Low Scale Canny edge
image contains weak edge components that have
weak gradient values as well as strong edge compo-
nents. Fig. 5 explains the suitability of Low Scale
Canny edge image for skyline search process. The
second image is the result of the skyline search using
High Scale Canny edge image, and the third image is
the result using Low Scale Canny edge image. We
can see that the skyline of the third image is more
exquisite than that of the second image.
Figure 5: Skyline search using High Scale Canny edge
image: the second image, and Low Scale Canny edge
image: the third image.
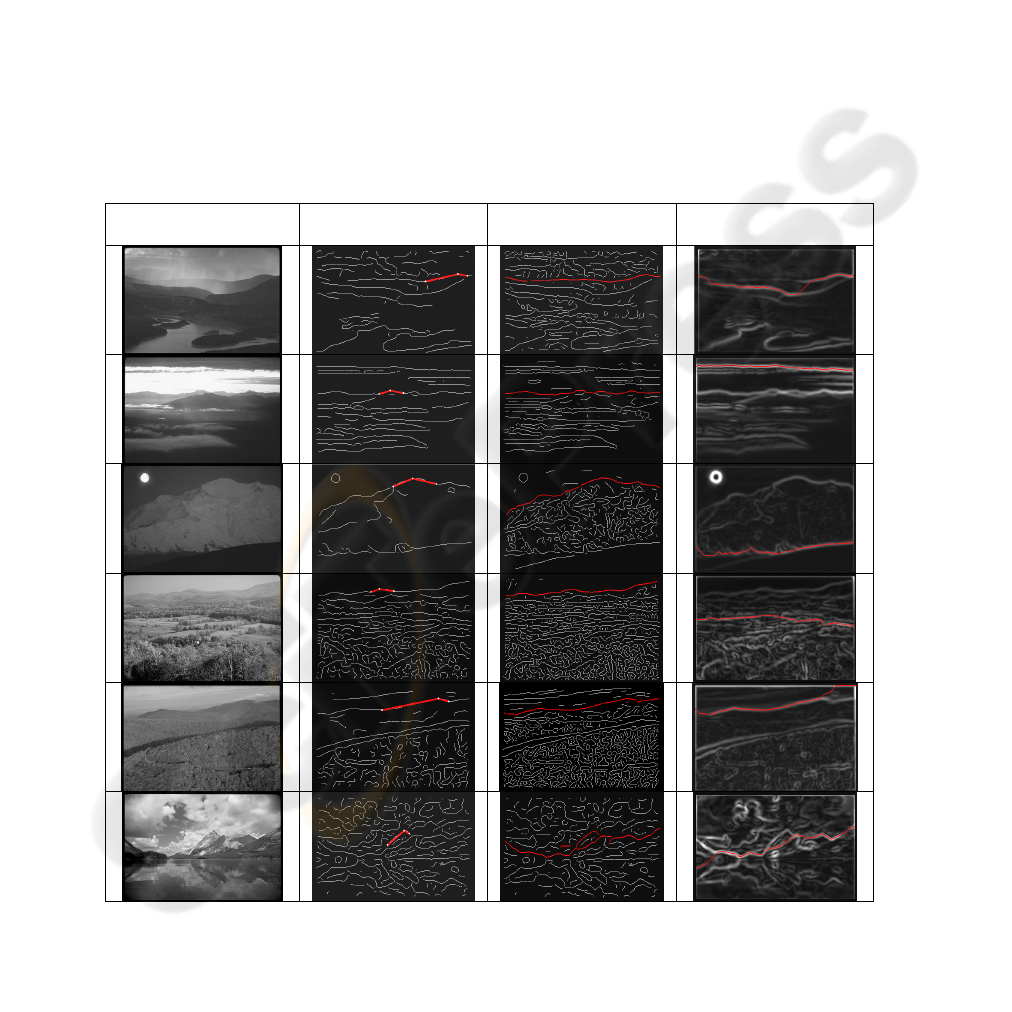
4 EXPERIMENTAL RESULTS
In our experiments, 55 images acquired in different
environments were tested. And we could extract
skylines accurately in 50 images. We could extract a
part of the skylines in the other 5 images. We can see
that the proposed algorithm works accurately even
when there are complex environments in the images.
Some of the test images are shown here. The results
are compared with Woo et al.’s, 2005 gradient based
DP method. In Fig.6, the first column shows the
original test images. The second column shows the
seed using the proposed method, the third column
shows the extracted skyline using the proposed
method and the last column shows the extracted
skyline using Woo et al.’s method. We can see that
in Woo et al.’s method, it confuses the skyline and
other lines that have large gradient. And it can not
search the whole skyline accurately because of the
noises, for example clouds and fog. But the proposed
method still works well under the complex
environments.
5 CONCLUSIONS
In this paper, we presented a new robust skyline
extraction algorithm in mountainous images. The
major contribution is the use of two-scale canny
edge images and the development of new skyline
extraction algorithm. Using topological information,
location of the skyline in an image and a feasible
search algorithm, we developed a new skyline
extraction algorithm. By applying two-scale canny
edge images to proper skyline extraction steps, we
could overcome the defects of two images. We
applied our algorithm to 55 images that have various
complex environments. In about 90% of the images
we could find exact skylines. The experimental
results show the robustness of our algorithm under
complex environments.
REFERENCES
Canny, J., 1986. A computational theory for edge
detection. In IEEE Trans. On Pattern Recognition and
Machine Intelligence, vol.26, no.6, pp.679-698.
Cozman, F., Krotkov, E., 1997. Automatic mountain
detection and pose estimation for teleoperation of
lunar rovers. In Proc. Of the International Conference
on Robotics and Automation, pp.2452-2457.
Cozman, F. and Krotkov, E. and Guestrin, C., 2000.
Outdoor visual position estimation for planetary
rovers. Autonomous Robots, 9, pp.135-150.
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
256
Ettinger, Scott M., Nechyba, Michael C., Ifju, Peter G. and
Waszak, Martin, 2002. Vision-guide flight stability
and control for micro air vehicles. In IROS ’02, proc.
IEEE/RSJ International Conference on Intelligent
Robots and System, pp.2134-2140.
Fang, M.., Chiu, M.-Y., Liang, C.-C. and Singh, A., 1993.
Skyline for video-based virtual rail for vehicle
navigation. In Proc. IEEE International Sympos. On
Intelligent Vehicles, pp.207-212.
Forsyth, D. A. and Ponce, J., 2003. Computer Vision A
Modern Approach, Prentice Hall, Upper Saddle River,
NJ.
Lie, W.N., Lin, T.C.-I., Lin, T.-C. and Hung, K.-S., 2005.
SA robust dynamic programming algorithm to extract
skyline in images for navigation. In Pattern
Recognition Letters, 26, pp.221-230
Messi, Mark, et al., 2003. Vision chip flight stability and
control for micro air vehicles, In ISCAS ’03, proc.
IEEE International Conference on Circuit System,
pp.786-789.
Stein, F. and Medioni, G., 1995. Map-based localization
using the panoramic horizon. IEEE Trans. On
Robotics and Automation, 11(6), pp. 892-896.
Stewart, J.A., 1998. Fast horizon computation at all points
of a terrain with visibility and shading applications.
IEEE Trans. Visual. Comput. Graphics, 4(1), pp.82-93.
Trucco, E. and Verri, A., 1998. Introductory techniques
for 3-d computer vision, Prentice Hall, Upper Saddle
River, NJ.
Truchetel, F., et al., 2006. Attitude Measurement by
Artificial Vision. Measurement Science and
Technology, vol. 17, pp.101-110.
Talluri, R. and Aggarwal, J., 1992. Position estimation
for an autonomous mobile robot in an outdoor
environment. IEEE Trans. Robotics and Automation,
8(5), pp.573-584.
Woo, J.H., Kweon, I.S., 2005. Robust horizon and
peak extraction for vision-based navigation. In
MVA’06 Proc. IAPR workshop on Machine Vision
Applications.
Test image Seed selection Skyline search
Gradient based
DP search
Figure 6: Experimental results for six chosen test images and the comparison with the results of Woo et al.’s method.
ROBUST SKYLINE EXTRACTION ALGORITHM FOR MOUNTAINOUS IMAGES
257
