
EVALUATING STITCHING QUALITY
Jani Boutellier, Olli Silv
´
en, Lassi Korhonen
Machine Vision Group, University of Oulu, P.O. Box 4500, 90014 University of Oulu, Finland
Marius Tico
Nokia Research Center, P.O. Box 100, 33721 Tampere, Finland
Keywords:
Stitching, image mosaics, panoramas, image quality.
Abstract:
Until now, there has been no objective measure for the quality of mosaic images or mosaicking algorithms.
To mend this shortcoming, a new method is proposed. In this new approach, the algorithm that is to be tested,
acquires a set of synthetically created test images for constructing a mosaic. The synthetic images are created
from a reference image that is also used as a basis in the evaluation of the image mosaic. To simulate the
effects of actual photography, various camera-related distortions along with perspective warps, are applied to
the computer-generated synthetic images. The proposed approach can be used to test all kinds of computer-
based stitching algorithms and presents the computed mosaic quality as a single number.
1 INTRODUCTION
Image stitching is a method for combining several im-
ages into one wide-angled mosaic image. Computer-
based stitching algorithms and panorama applica-
tions have been used widely for more than ten years
(Davis, 1998), (Szeliski, 1994). Although it is ev-
ident that technical improvements have taken place
in computer-based image stitching, there has been
no objective measure for proving this trend. Subjec-
tively, it is relatively easy to say whether a mosaic
image has flaws or not (Su et al., 2004), but analyzing
the situation computationally is not straightforward at
all.
If we assume that we have a mosaic image and
wish to evaluate it objectively, the first arising prob-
lem is usually the lack of a reference image. Even
if we had a reference image of the same scene, we
would generally notice that it did not have exactly
the same projection as the mosaic image, therefore
making pixel-wise comparison impossible. Also, it
may happen that between taking the hypothetical ref-
erence image and the narrow-angled mosaic image
parts, the scene might have changed somewhat, mak-
ing the comparison unfit.
In this text a method is described to overcome
these problems, but before going deeper into the
topic, some terms need to be agreed upon. From here
on, the narrow-angle images that are consumed by a
stitching algorithm, are called source images. Also,
we will call the group of source images a sequence,
even if the source images are stored as separate image
files. It is worth mentioning that the source images
are given to the stitching algorithm in the same order
as they have been created.
To be able to create a method of evaluating mo-
saics, we have to know what kinds of errors exist in
mosaic images. Flaws that we will call discontinuities
are caused by unsuccessful registration of source im-
ages. Apart from completely failed registration, the
usual cause of these kinds of errors is the use of an
inadequate registration method. For example, if the
registration method of a stitching algorithm is unable
to correct perspective changes of the source images
to the mosaic, the mosaic will have noticeable bound-
aries.
Blur is a common flaw in most imaging occasions
and may be caused by the imaging device or by ex-
trinsic causes, e.g. camera motion. In mosaicking,
blur can also be caused by inadequate source image
blending.
Object clipping happens when the location of an
object changes in the view of the camera between the
source image captures. In a practical image mosaic, a
common clipped object is for example a pedestrian.
The final mosaic flaw introduced here can only be
10
Boutellier J., Silvén O., Korhonen L. and Tico M. (2007).
EVALUATING STITCHING QUALITY.
In Proceedings of the Second International Conference on Computer Vision Theory and Applications - IFP/IA, pages 10-17
Copyright
c
SciTePress

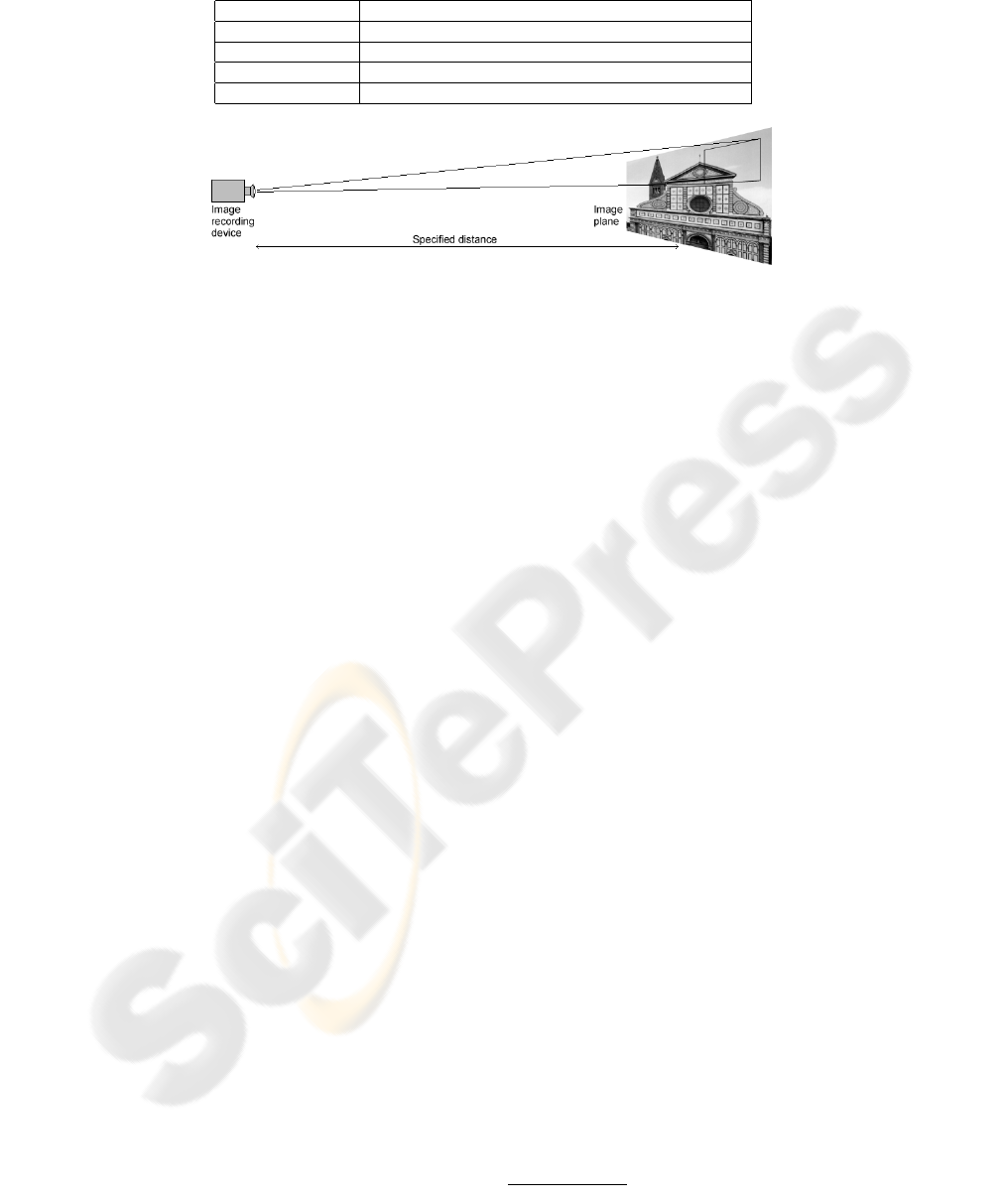
Table 1: Common flaws in image mosaics.
Type of Error Cause
Discontinuity Failed or inadequate source image registration
Blur Shooting conditions, unfit blending, lens distortions
Object Clipping Moving object in source image ignored
Intensity Change Color balancing between mosaic parts
Figure 2: The simulated imaging environment.
where the camera is at some fixed distance from the
reference image that appears as a plane in 3D-space.
(See Figure 2). As a result, perspective distortions
appear in the source images. In literature this is called
the pinhole camera model (J
¨
ahne, 1997).
Images that are normally delivered to a stitching
algorithm for mosaicking have several kinds of distor-
tions caused by the camera and shooting conditions.
Real-world camera lenses cause vignetting and radial
distortions to the image (J
¨
ahne, 1997). If the user
takes pictures freehand, the camera shakes and may
cause motion blur to the pictures. Also, it is com-
mon that the camera is slowly rotated from one frame
to another when shooting many pictures of the same
scene. Finally, cameras tend to adapt to lighting con-
ditions by changing exposure times according to the
brightness of the view that is shown through the cam-
era lens.
The frames are created by panning the simulated
camera view over the reference image in a zig-zag
pattern and by taking shots with a nearly constant in-
terval (see Figure 3). The camera jitter is modeled
by random vertical and horizontal deviations from the
sweeping pattern along with gradually changing cam-
era rotation. Motion blur caused by camera shak-
ing is simulated by filtering the source image with a
point-spread function consisting of a line with random
length and direction.
Camera lens vignetting is implemented by mul-
tiplying the source image with a two-dimensional
mask, that causes the image intensity to dim slightly
as a function of the distance from the image center.
Radial distortions are created by a simple function
that is given in equation 1.
d
n
= d + kd
3
, (1)
where
d is the distance from the image center,
d
n
is the new distance from the center and
k is the distortion strength parameter.
The radial distortion is applied by calculating a
new distance for every pixel from the image center
in the source image. The result of this warp is a bar-
rel distortion if the constant k is positive. Finally, the
simulated differences in exposure time are applied to
the source image by normalizing the mean of the im-
age to a constant value. Figure 4 shows the effect of
each step in this simulated imaging process.
The source image sequence is recorded as an un-
compressed video clip by default, but can of course
be converted to other forms depending on the required
input type of the algorithm that is chosen for testing.
3.2 Mosaic Image Registration
The stitched mosaic image and the reference image
have different projections because the stitching soft-
ware has had to fit together the source images that
contain non-linear distortions. The mosaic image has
to be registered to the coordinates of the reference im-
age to make the comparison eligible.
For this purpose we selected a SIFT-based (Lowe,
2004) feature detection and -matching algorithm
1
,
that produced around one thousand matching feature
points for each image pair in our tests. An initial
registration estimate is calculated by a 12-parameter
polynomial model, after which definite outliers are
removed from the feature point set. The final regis-
tration is made by the unwarpJ -algorithm (Sorzano
et al., 2005) that is based on a B-spline deformation
model. It is evident that the success of image registra-
tion is a most important factor to ensure the eligibility
1
http://www.cs.ubc.ca/ lowe/keypoints/
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
12
of the quality measurement. According to the con-
ducted tests, the accuracy and robustness of unwarpJ
are suitable for the purpose.
An example of the registration process can be seen
in Figure 6. The topmost image is a mosaic image
created by a stitching algorithm. The middle image
in Figure 6 shows the registered version of the mosaic
above, and the image in the bottom shows the corre-
sponding similarity map (See next subsection). No-
tice how slight stitching errors have prevented flaw-
less matching in the bottom-right corner of the image.
3.3 Similarity Calculation
Our method uses the recent approach of Wang (Wang
et al., 2004) to estimate the quality of the registered
mosaic. The approach of Wang estimates the similar-
ity of two images and gives a single similarity index
value that tells how much alike the two images are.
This method fits very well to the requirements of mo-
saic evaluation, since it pays attention on distortions
that are clearly visible for the human vision system.
This includes blurring and structural changes that are
common problems in mosaics. Wang’s method does
not penalize for slight changes in the image intensity.
This arrangement will notice blurring and discon-
tinuity -flaws in the mosaic images that are created
from test videos. With the current test setup it is not
possible to simulate situations that would cause object
clipping.
4 PRACTICAL TESTS
We used three different stitching algorithms to test the
functionality of our test method: Autostitch (Brown
and Lowe, 2003), Surveillance Stitcher (Heikkil
¨
a and
Pietik
¨
ainen, 2005) and a still unpublished algorithm
Figure 3: Camera motion pattern over a reference image
and a quadrangle depicting the area included in an arbitrary
source image.
called Mobile Stitcher. The algorithms were tested by
three different video sequences that were created from
the images shown in Figure 5.
Each algorithm was tested with the three se-
quences. Results of subjective mosaic evaluation and
quality indexes provided by our algorithm are visible
in Table 2. A detailed analysis concerning one of the
sequences can be found in the caption of Figure 7.
The other results are only shown as pictures due to
space constraints.
We can notice from the results that the acquired
quality indexes are not comparable from one se-
quence to another. The focus of this testing was not to
sort the tested algorithms to some order of quality, but
to simply show what kinds of results can be achieved
with our testing method. When the similarity indexes
were calculated, 50 pixels from each image border
were omitted, since the non-linear registration algo-
rithm was often a bit inaccurate near image borders.
UBC Autostitch acquired the best results from
each test, which can also be detected visually, since
the results are practically absent of discontinuities.
The Surveillance Stitcher acquired second best re-
sults, although most of its results had slight disconti-
nuities. The Mobile Stitcher performed worst in these
tests, which is easily explained by the fact that the al-
gorithm is the only one of the three that uses an area-
based registration (Zitov
´
a and Flusser, 2003) method
and thus is unable to correct perspective distortions.
Figure 8 shows a mosaic that was created by Au-
tostitch along with some modified versions of the mo-
saic. The figure depicts how different kinds of mo-
saicking errors affect the similarity map and the nu-
merical quality of the mosaic. A more detailed expla-
nation can be found in the caption of Figure 8.
A slight setback in the testing was to notice that
the currently used registration method proved to be
inaccurate in one occasion. In Figure 8 each similarity
map indicates that something is wrong in the right end
of the building. However, visual inspection reveals no
problems. The reason behind the indicated difference
is effectively a misalignment of a few pixels. This
should obviously be corrected in the future.
5 CONCLUSION
We have presented a novel way to measure the perfor-
mance of stitching algorithms. The method is directly
applicable to computer-based algorithms that can cre-
ate mosaic images from source image sequences.
The method could be improved by using depth-
varying 3D models, which would test the algorithms’
abilities to cope with effects of occlusion and paral-
EVALUATING STITCHING QUALITY
13

Table 2: Mosaic quality values and visually observed distortions of test mosaics. The numbers in braces indicate which figure
displays the corresponding result, if it is shown.
Algorithm Pattern Facade Graffiti
UBC Autostitch 0.81 (7), blur, slight discont. 0.89 (8), blur 0.76, blur
Mobile stitcher 0.80 (7), discontinuities 0.68, discontinuities 0.65, discontinuities
Surveillance stitcher 0.75 (7), blur, discont. 0.86, blur, slight discont. 0.72 (6), blur, discont.
lax. Also, the presence of moving objects could be
simulated in future versions of the testing method.
REFERENCES
Bors, A. G., Puech, W., Pitas, I., and Chassery, J.-M.
(1997). Perspective distortion analysis for mosaicing
images painted on cylindrical surfaces. In Proceed-
ings of the IEEE Conference on Acoustics, Speech,
and Signal Processing, volume 4, pages 3049–3052.
Brown, M. and Lowe, D. G. (2003). Recognising panora-
mas. In Proceedings of the 9th International Con-
ference on Computer Vision, volume 2, pages 1218–
1225.
Davis, J. (1998). Mosaics of scenes with moving objects.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition, pages 354–360.
Feldman, D. and Zomet, A. (2004). Generating mosaics
with minimum distortions. In Proceedings of the IEEE
Conference on Computer Vision and Pattern Recogni-
tion Workshop, pages 163–170.
Heikkil
¨
a, M. and Pietik
¨
ainen, M. (2005). An image mosaic-
ing module for wide-area surveillance. In Proceedings
of the ACM Workshop on Video Surveillance and Sen-
sor Networks, pages 11–18.
J
¨
ahne, B. (1997). Digital Image Processing, Concepts,
Algorithms, and Scientific Applications. Springer-
Verlag, Berlin, 4th edition.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. International Journal of Com-
puter Vision, 60(2):91–110.
Marzotto, R., Fusiello, A., and Murino, V. (2004). High
resolution video mosaicing with global alignment. In
Proceedings of the IEEE Conference of Computer Vi-
sion and Pattern Recognition, volume 1, pages 692–
698.
Sorzano, C. O., Thevenaz, P., and Unser, M. (2005). Elastic
registration of biological images using vector-spline
regularization. IEEE Transactions on Biomedical En-
gineering, 52(4):652–663.
Su, M.-S., Hwang, W.-L., and Cheng, K.-Y. (2004). Analy-
sis on multiresolution mosaic images. IEEE Transac-
tions on Image Processing, 13(7):952–959.
Swaminathan, R., Grossberg, M. D., and Nayar, S. K.
(2003). A perspective on distortions. In Proceedings
of the IEEE Conference of Computer Vision and Pat-
tern Recognition, volume 2, pages 594–601.
Szeliski, R. (1994). Image Mosaicing for Tele-Reality Ap-
plications. DEC Cambridge Research Lab Technical
Report 94/2.
Wang, Z., Bovik, A. C., Sheikh, H. R., and Simoncelli, E. P.
(2004). Image quality assessment: from error visi-
bility to structural similarity. IEEE Transactions on
Image Processing, 13(4):600–612.
Zitov
´
a, B. and Flusser, J. (2003). Image registration
methods: a survey. Image and Vision Computing,
21(11):977–1000.
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
14



