
GENERIC OBJECT TRACKING FOR FAST VIDEO
ANNOTATION
Rémi Trichet and Bernard Mérialdo
Institute Eurecom, BP 193, 06904 Sophia-Antipolis, France
Keywords: Object tracking, video annotation, keypoints, interactive television, color adaptation.
Abstract: This article describes a method for fast video annotation using an object tracking technique. This work is
part of the development of a system for interactive television, where video objects have to be identified in
the video program. This environment puts specific requirements on the object tracking technique. We
propose to use a generic technique based on keypoints. We describe three contributions in order to best
satisfy those requirements: a model for a broader temporal use of the keypoints, an ambient color adaptation
pre-treatment enhancing the keypoint detector performance, and a motion based bounding box repositioning
algorithm. Finally, we present experimental results to validate those contributions.
1 INTRODUCTION
Object tracking has been the subject of recent
improvements (Isard, 2001) (Comaniciu, 2002) (Hu,
2004) (Techmer, 2001) (Gyaourova, 2003) (Pupilli,
2005), so that these systems are becoming more and
more reliable. In consequence, their application for
commercial products, such as video surveillance, is
becoming more and more common. But those
trackers are often developed for specific
applications, leading them to solely work in a very
constrained environment. For instance, surveillance
systems (Comaniciu, 2002) (Techmer, 2001) and
traffic monitoring (Gyaourova, 2003) make the
assumption of a pre-defined pattern of object and a
still camera. Body trackers (Isard, 2001) (Karaulova,
2000) use specialized model like articulated stick
figure to represent human beings. Moreover, in most
of the human trackers (especially in the surveillance
domain) only indoors places are considered. In sport
applications (Jaffré, 2003), the tracked object is
always small and fast with strong color contrast.
Our work takes place in the context of the
development of an interactive television system,
which aims to realize direct interactivity with
moving objects on hand-held receivers. In this
system, the video producer will annotate the video
program by defining video objects in the video
sequence, and attaching to them some additional
content (for example, text, images, videos, web
reference, etc…). On the receiver side, the user
watching the video program will be able to select the
active video objects and immediately access the
corresponding additional content. This environment
induces several specific constraints:
• For this scheme to be practically viable, the
extra production cost for manual annotation
should be minimized, so manual annotation
should be as fast as possible. The idea is that the
producer will identify a video object on the first
frame of a shot, and a tracking system will
follow it throughout the shot. Since the producer
has to check the validity of the tracking, the
tracking system should be as fast as possible
(and if possible faster than real time).
• This system could be used for any type of video
program, so the tracking system should not be
constraint on a specific video genre, or specific
characteristics of the video object. It should rely
on generic techniques, or be able to adapt to the
video program being annotated.
• Both for annotation and display to the user, the
video objects should be identified by bounding
boxes. This limits the refinement of the
description of the video objects, and imposes
the correct placement of the bounding box as a
performance criterion for the tracking system.
Our approach is based on the identification of
keypoints in the video scene. Keypoints offers many
advantages. These points, first developed for robotic
419
Trichet R. and Mérialdo B. (2007).
GENERIC OBJECT TRACKING FOR FAST VIDEO ANNOTATION.
In Proceedings of the Second International Conference on Computer Vision Theory and Applications - IU/MTSV, pages 419-426
Copyright
c
SciTePress

(Moravec, 1980), are located at key positions
(usually corner or extrema of a given function),
making them easy to recover. Moreover, they are
enriched by local descriptors in order to increase
their robustness to usual transformations (scale
changes, illumination changes, rotations, affine
transformations…). Thus, keypoints are a reliable
tool for the problem of generic tracking. Moreover,
their computation is independent of the object
location, so that most of the computation and the
matching process could be done offline, leaving only
minimal processing left during the annotation
session.
We propose three contributions to satisfy the
specific requirements of our video annotation
environment: first, a model for a broader temporal
use of the keypoints; then, an ambient color
adaptation pre-processing allowing the keypoint
detector to deal with a larger variety of videos; and
finally, a motion based bounding box repositioning
algorithm.
The rest of this article is organized as follows.
We will describe the structure of our tracking system
in section 2. Then we motivate the choice of our
keypoint detector in section 3. The color adaptation
pre-processing is explained in section 4. Section 5
describes our multiframe model. In section 6, our
bounding box repositioning algorithm is discussed
and results are presented in section 7. Finally,
section 8 will conclude and suggest further
enhancements.
2 STRUCTURE OF THE
TRACKER
Our tracking system is modelling the object with a
set of keypoints. The model is initialized with the
keypoints that lie within the bounding box of the
object in the first frame. Afterwards, the keypoints
extracted on every new frame are matched with the
model keypoints using a winner-take-all algorithm.
The bounding box is then repositioned according to
the motion of the matched points. Finally, the model
is updated: the descriptors of the model matched
points are updated with their corresponding image’s
point descriptor, and the new object keypoints are
added to the model. This process can be summarized
by the following steps:
Initialization:
- keypoint extraction for the first frame (off-line)
- object bounding box drawing
Main loop (for every new frame):
- keypoint extraction (off-line)
- keypoint matching (off-line)
- bounding box repositioning
- object model update
When annotating a recorded video program, it is
important to notice that much of the required
computation can be performed before the annotation
session: keypoints may be computed over the whole
image for every frame (we don’t know yet what are
the objects that will be annotated), and matched
between consecutive frames. Those results can be
stored, so that, during the annotation session, the
only work left is to reposition the bounding box and
update the object model for every new frame. This
organization of the computation answers to the
requirement for a fast tracking system.
3 KEYPOINTS DETECTOR
The invariant feature detectors can be divided in two
main categories: keypoint detectors and regions
detectors. Although they both rely on the same
principles, some characteristics differ. Regions
detectors, by extracting larger areas, have a less
precise localization. On the other hand, the
associated support region used for the descriptor
computation will be the extracted region, instead of
a pre-defined circular region. This much more
accurate region will lead to a more robust object
description. In order for the reader to understand our
reasoning in the choice of a keypoint rather than a
region detector, this section will address feature
detectors.
There are two criterions for establishing the
efficiency of a feature detector. The first criterion,
called repeatability rate, was set up by (Schmid,
1997). It represents the ability for a point to be
detected at the same location in various images. In
practice a point is rarely detected at the exact same
position, but in a small neighbourhood. This implies
the notion of precision of the localization,
introduced by (Gouet, 2000). In her work, she
specifies that this phenomenon is independent from
the repeatability rate.
The second criterion is the robustness to standard
transformations (rotation, blur, scale changes, affine
transformations…). This criterion is related to the
repeatability rate in the sense that a transformation
unhandled by a detector will lead to a low
repeatability rate. Hence, the repeatability rate is
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
420

usually computed for a given transformation. The
evolution of the detectors could be associated to
their ability to deal with these transformations. At
the infancy of the domain, the algorithms solely
rotation were handled. The widely used Harris
corner detector (Harris, 1988) was giving the better
score. Latter, (Dufournaud, 2000), followed by
(Mikolajczyk, 2001) with the Harris-Laplace
detector have strengthen the Harris detector under
the scale changes. Finally, the principle was recently
extended to allow the algorithms to deal with affine
transformations. A survey and comparison of the
affine invariants algorithms is shown in
(Mikolajczyk, 2005-2).
A large variety of descriptors has been
developed or adapted to the feature detectors in
order to enhance their discriminative power. A quite
exhaustive survey and evaluation of these
descriptors is proposed in (Mikolajczyk, 2005-1).
In the framework of a video tracker, the
repeatability and the precision of the localization of
our detector will be our first priority. Moreover, our
points will often be located in areas of frequent
modifications (a moving object). Thus, descriptors
computed on a small size region will be preferred.
These two cues have oriented our choice on
keypoint rather than region detectors. Furthermore,
only slight changes will happen between two frames.
So, our system will mainly have to deal with blur,
rotation, and some scale changes.
The Harris-Laplace detector (Mikolajczyk, 2001)
satisfies all these requirements and was implemented
for our experiments described in the others sections.
The associated descriptors are the generalized
color moments (Mindru, 2003). They are an adapted
version of the grey-values moments to the color
channels. A generalized moment of order p+q and
degree a+b+c is defined by:
[]
[
][ ]
∑
=
V
cba
qpabc
pq
yxByxGyxRyxM ),(),(),(
(1)
They characterized the shape of the distribution
on a region in a uniform manner. Moreover the
exploitation of color channels allows them to extract
more information. So, they can describe more
precisely a region without needing the computation
of higher degrees moments. This discriminative
power is more widely exploited by our pre-treatment
mechanism presented in the fifth part. The support
region chosen is a circular region with a radius
proportional to the detected scale.
4 COLOR ADAPTATION
Our tracking system should handle a diversity of
video genres, in particular a diversity of color
ambiance. Thus, we propose a color adaptation
scheme to weight the discriminative importance of
different color channels. For instance, in the figure
1, we have examples of several images where one
color is predominant. When the information is
concentrated in one or two color channels, assigning
to each channel an importance proportional to its
discrimination power will extract richer information
and will help the detection algorithm to produce
better results. In our model, we try to associate to
each color channel c a weight P(c) representing his
importance, so that:
ncP
n
c
=
∑
=1
)(
(2)
with n being equal to the number of channels (3 in
our case of RGB color space).
For comparing the relative importance of color
channels, we have defined two indicators : size and
saliency. The size represents the extent and the
intensity of the color channel in the image. The size
S(ci) of a channel c is equal to the sum of the pixel
intensities of the image Im for this color channel:
∑
∈
=
Im
)()(
p
c
pIcS
(3)
The saliency models the visual attraction of a
particular color channel. It is characterized by a
pronounced histogram on one or several values
(presence of peaks). We determine it by calculating
the Kurtosis for each of the channels. The Kurtosis
K(c), or central moment of degree 4 represents the
flattering level of a distribution. A Kurtosis lower
than zero indicates a flat distribution, whereas a
Kurtosis higher than zero characterizes a peaked
distribution. More formally:
()
3
)()(
)()(
)(
2
0
2
0
4
−
−
−
=
∑
∑
=
=
n
x
c
n
x
c
xhx
xhx
cK
μ
μ
(4)
with n the number of bins (255 in the case of the
RGB color space) of the considered histogram, h(x)
the x
th
value of the distribution, and
μ
c
the
distribution average. The weights associated to each
channel are then obtained by combining the size and
the saliency with the following formula:
GENERIC OBJECT TRACKING FOR FAST VIDEO ANNOTATION
421
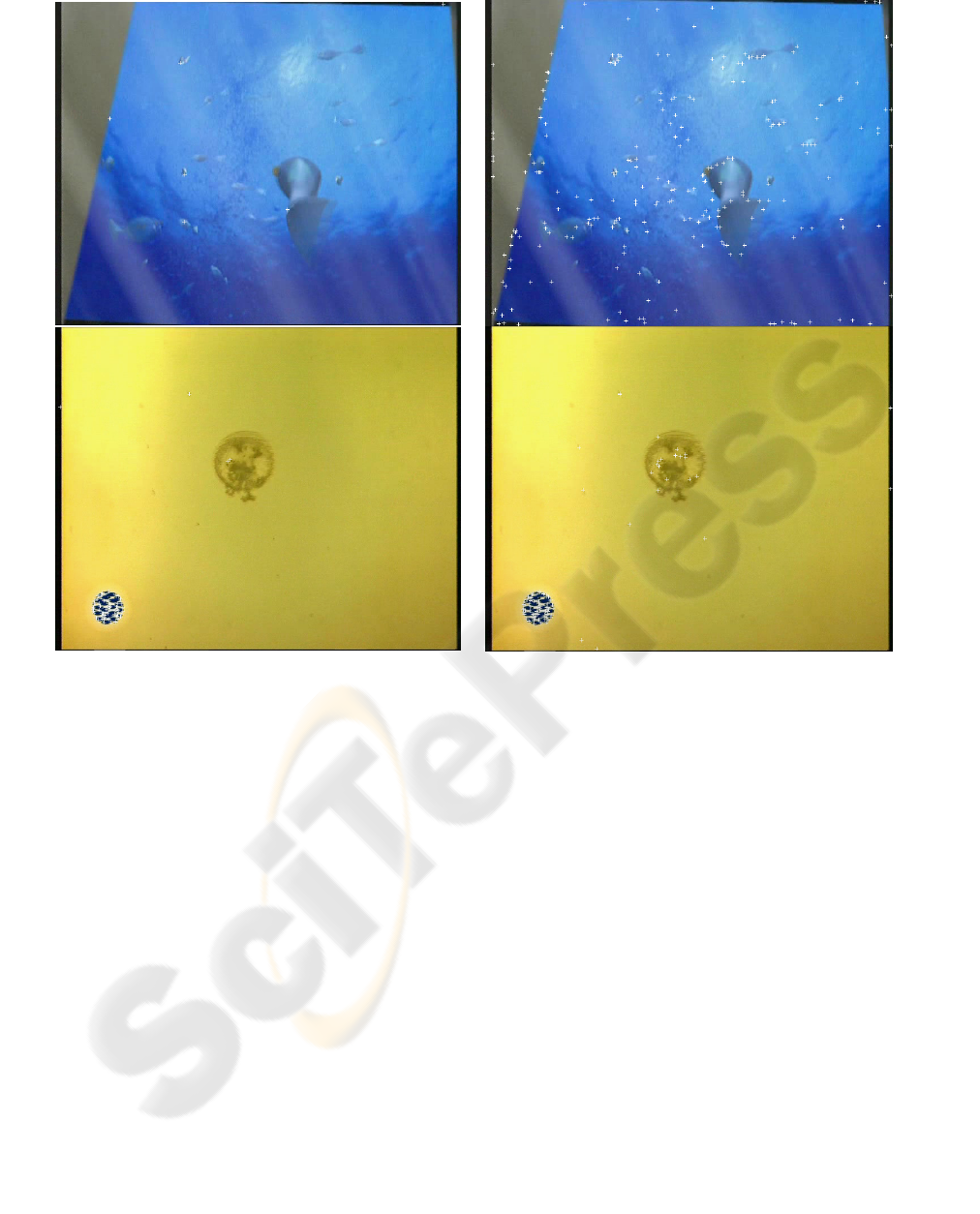
(a) (b)
Figure 1: Harris keypoints extracted (represented by a white cross) in the sequences “fish” and “jellyfish” (a) without color
adaptation to the importance of the channels (b) with color adaptation.
))(1()()( cKcScP
+
×=
(5)
Finally, the weights P(c) are normalized to
satisfy the initial constraint (2). Figure 1 provides
examples of the results of the Harris detector with
and without color adaptation.
5 MULTIFRAME MATCHING
Our matching algorithm associates to each point of
the previous frame the most similar point of the
current frame in a local neighborhood. The
similarity between points is based on the
Mahalanobis distance of their descriptors. Each
point of the current frame is only associated once
with a winner-take-all like algorithm, that is, the best
matching is always preferred and no global matching
quality is considered.
As explained in the section 3, the efficiency of
keypoint detectors could be evaluated with their
robustness to usual transformations and their
repeatability. However, this last measure has rarely
been used in the context of videos, but rather for
images. In our experiments, we have observed a
temporal instability of the keypoints in videos.
Because of some local alterations specifics to videos
(blur due to motion, poor quality video, or sensors
calibration problems), some points disappear during
one or several frames, and then reappear. To
overcome this drawback, our matching algorithm is
conserving the keypoints during k frames, that is, if a
keypoint is not matched for k images, then it is
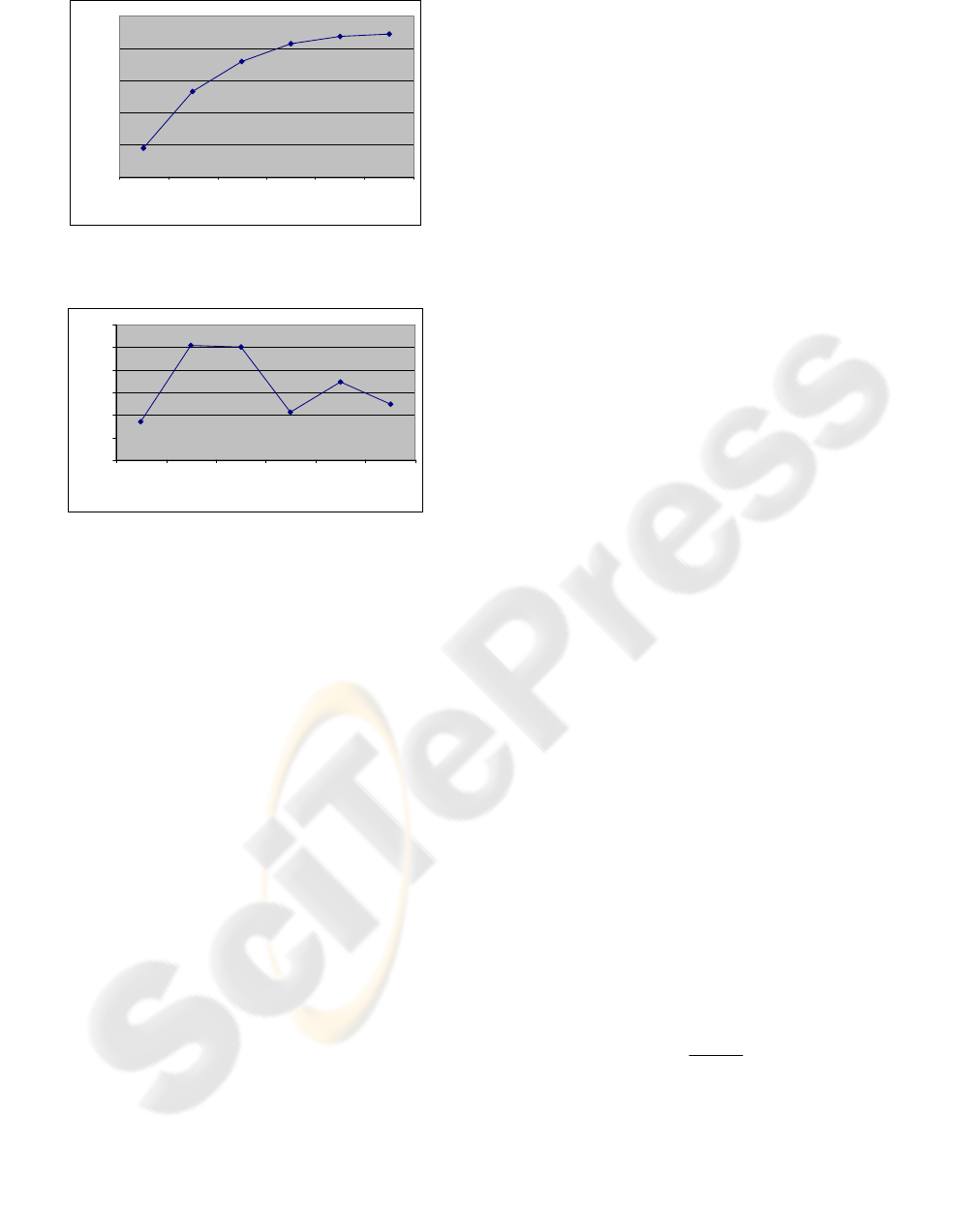
removed. Our experiments show an increase of the
matching rate when the keypoint conservation time
increases (see Figure 2). But when a keypoint is
conserved for too long, its descriptor is not updated
and this increases the risk of false matching and does
not lead to a better accuracy in tracking (see figure
3). We have chosen k=3, since this offers a good
compromise between tracking accuracy and
computation time.
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
422
60
65
70
75
80
85
123456
Keypoints conservation time (in fra me s)
matching rate
Figure 2: Matching rate function of the keypoint
conservation time.
71
72
73
74
75
76
77
123456
keypoints conservation time (in frames)
average tracking quality
Figure 3: Average tracking quality function of the
keypoint conservation time. The tracking quality is
computed with the mechanism discussed in section 7.
6 BOUNDING BOX
REPOSITIONING
Only few tracking algorithms are using keypoints.
Gabriel & al (Gabriel, 2005) work is the most
striking one in this particular field of research. This
algorithm takes as input the matched keypoints of
the observed image. It first calculates a trimmed
mean over the motion values,
considering the upper
and lower bounds as false matching. The gravity
centre of these points is then computed for the model
and the observed image. In order to eliminate more
false matching, the remaining set of points is then
passed through another filter. If erasing a point
moves significantly the position of the gravity
centre, then this point is considered as a false
matching and will not be further taken into account.
The last step consists in positioning the bounding
box on the observed image in order to have the
gravity centre at the same position as for the model.
This method has two drawbacks. First, scale changes
are not handled. And secondly, because of the
aforementioned temporal instability of the keypoints
(see section 3), points could appear and disappear
from one image to another, modifying the position
of the gravity centre. This problem, added to the
keypoint localization imprecision (mentioned in
sectioned 3 too) will reduce the precision of the
gravity centre detection. Since the bounding box
positioning is done in relation to the previous image,
errors will propagate during the sequence.
In order to avoid most of theses disadvantages,
we have chosen a motion based positioning
algorithm. Knowing the position (x,y) of the
keypoints for the object model A and the observed
image B, we use the least square method to compute
the translation values a0 and a1, the scale values a2
and a3, and the rotation values a4 and a5 that best
explain the motion between A and B. More formally,
we have:
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
×
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
1
0
35
42
a
a
y
x
aa
aa
y
x
B
B
A
A
(6)
In order to facilitate the calculation of a local
movement, we have fixed a4=a5=0, we first
identify the translation parameters, then we explain
the remaining error with the scale parameters. As for
Gabriel’s method, we eliminate keypoints which are
potential false matching by the condition:
yyxx
kymetkxm
σ
σ
<−
<
−
)()(
(7)
where m
x
and m
y
are the means, σ
x
and σ
y
and the
standard deviations of the keypoints coordinates on
the X and Y axes respectively, and k the tolerance
factor of motion (fixed to k=2).
7 EXPERIMENTAL RESULTS
To evaluate the improvement brought by the
contributions proposed in our approach, we have set
up an evaluation testbed. In order to test the
genericity of our algorithm and to compare the
algorithms in different situations, videos sequences
with various objects and difficulties have been
chosen. These shots are described in table 1. A hand
labelled ground truth bounding box was set up for
each frame and accuracy of the tracking algorithms
hypothesis is measured by the following classical
formula:
BA
BA
∪
∩
=B)d(A,
(8)
GENERIC OBJECT TRACKING FOR FAST VIDEO ANNOTATION
423
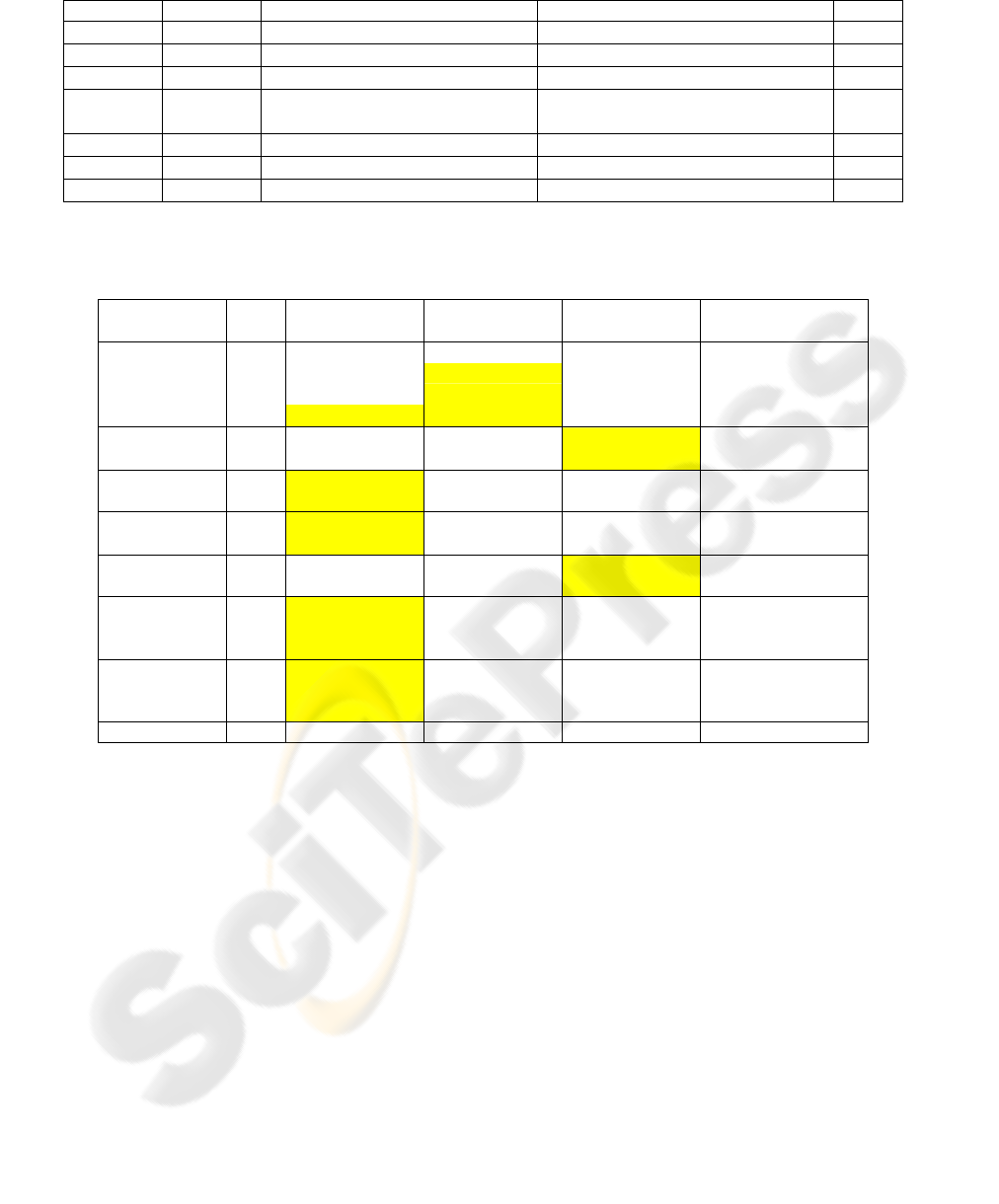
Table 1: Shots description.
Video Name Object Size Difficulties Description Frames
Fashion Big None woman turning back 120
Soccer small None Football player tracking 70
Cooking
medium scale change, cluttered background Marmite tracking with camera movement 60
Cognac small
Occlusions, fast & irregular motion,
cluttered background
Cognac bottle tracking 30
Jellyfish
medium low contrast, fast object change jellyfish swimming 30
Frying pan medium cluttered background Cook showing a frying pan 75
Bottle small Occlusions, cluttered background bottle passing from hand to hand 60
Table 2: Comparison of our algorithm based on a motion model, Gabriel’s algorithm based on the centre of gravity position,
and the basic Meanshift. For a given frame, the number displayed is the average performance over all the previous frames.
Best results are highlighted in yellow.
Video Name Frame Our algorithm Gabriel's algorithm Basic MeanShift
Our algorithm without
color adaptation
Fashion 30 89,5742% 89,4678% 75,30115% 89,2855%
60 79,1712% 83,1872% 66,92% 79,0293%
90
77,5669%
79,5691% 62,8489% 76,573%
120
78,3963%
78,9066% 62,4674% 78,6172%
Soccer 30
70,6246%
68,7984% 84,9789% 73,7586%
70 76,5633% 59,1253% 81,8645% 72,4328%
Cooking 30 90,4768% 85,1282% 72,9395% 92,6239%
60 75,7842% 64,6829% 68,7116% 80,6439%
Cognac 15 72,4329% 71,8726% 60,8272% 78,4865%
30 53,2051%
47,5774%
40,5432% 45,1862%
Jellyfish 15 65,0661% 85,6222% 86,4634% 58,123%
30 52,7346% 70,9549% 84,5328% 42,458%
Frying 25 92,1674% 72,9197% 78,7184% 83,6158%
pan 50 81,8894% 52,484% 69,4585% 76,4032%
75 79,8878% 46,0843% 63,9549% 80,5012%
Bottle 20 96,7539% 96,3405% 54,17% 96,7539%
40 73,6986% 67,7005% 47,2221% 70,6699%
60 62,3459% 55,0777% 37,2699% 59,5623%
Average quality 76,02% 70,86% 66,62% 74,23%
where A and B are respectively the ground truth and
the method bounding boxes. The results in table 2
show the average performance of the tracking for
different video sequences, and various intermediate
frames. A steep decrease in the performance is
generally the sign of a temporary loss of the object.
We have compared the performance of our
algorithm with Gabriel’s (Gabriel, 2005) and the
basic Meanshift (Comaniciu, 2002). Gabriel’s
method was implemented with the same keypoints
as ours, and using our color adaptation mechanism,
so that only the bounding box repositioning
algorithms are compared. The basic Meanshift was
used without the color adaptation algorithm.
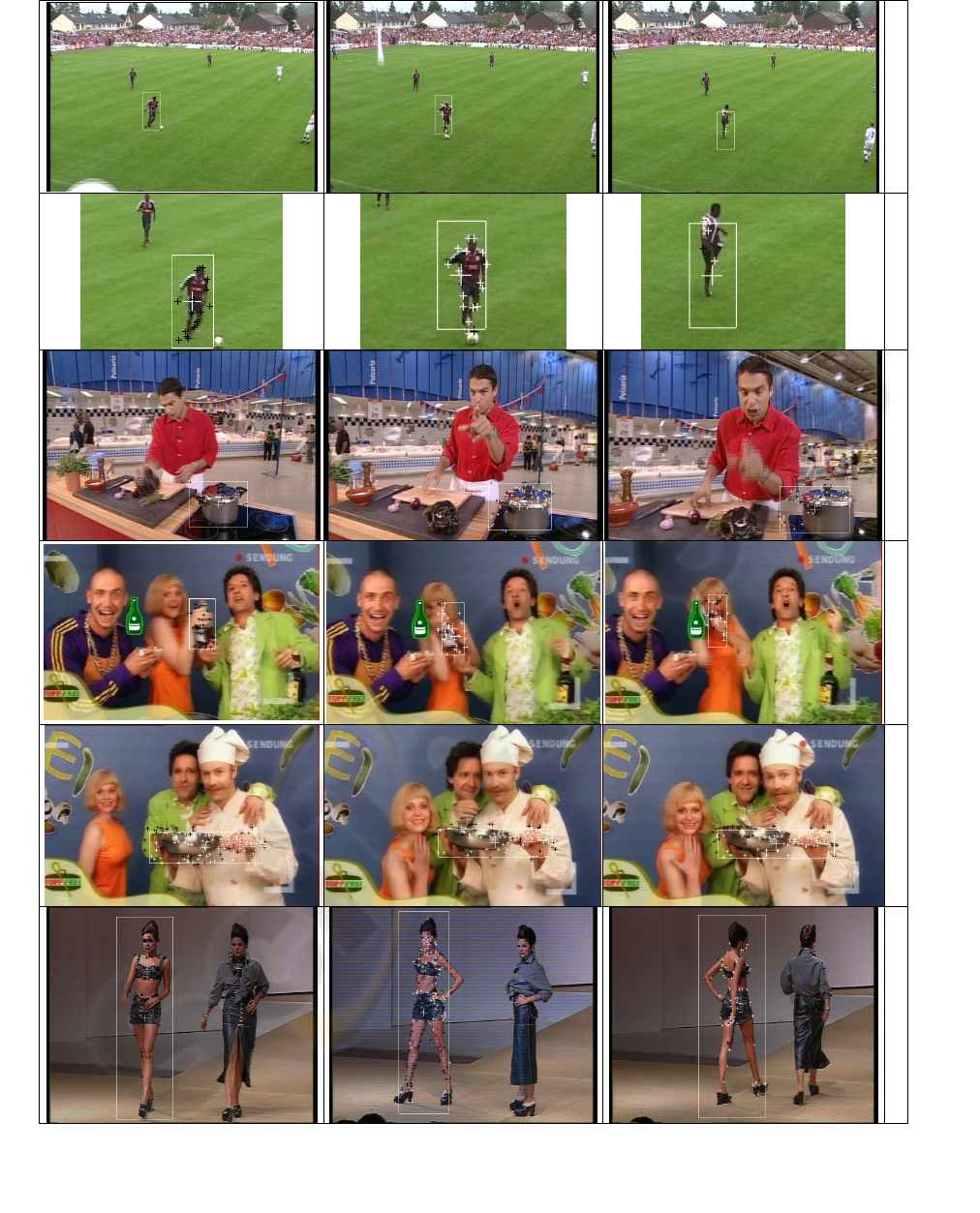
Results are presented in table 2 and some
examples are shown in figure 4. They show a better
behaviour than Gabriel’s algorithm in most of the
cases except when the whole object has local motion
variations, as the “jellyfish” sequence shows.
However our algorithm is still sensitive to error
propagation during the shot. In consequence, in the
case of a temporally loss, our algorithm will have
problems to focus on the object again. This problem
could dramatically decrease the performance of the
tracker in the case of a long sequence. Our algorithm
usually outperforms the basic Meanshift except for
small or medium objects in an uncluttered
environment (see the “jellyfish” and the “soccer”
sequences scores), cases in which this method is
known to behave well. The Meanshift quite low
results could be explained by a lack of precision.
Actually, we observed that, except for the “bottle”
and the “cognac” shots where the object is lost, the
algorithm manages to focus on the object, but
oscillates around it.
Table 2 also shows the results for our algorithm
without the color adaptation mechanism. The
slightly better scores could not be considered as
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
424

significant because of the subjectivity of the ground
truth. Nevertheless, in the case of a pronounced
color, the “jellyfish” video for instance, a real
improvement is stated.
8 CONCLUSION
We have presented our work in developing a generic
object tracker for fast video annotation based on
keypoint detection. The video annotation
environment imposes specific constraints on the
characteristics of the object tracking, and this lead us
to propose three contributions the tracking: an
ambient color adaptation mechanism, a matching
algorithm with a temporal use of the keypoints, and
a bounding box repositioning algorithm based on a
motion model. All these enhancements were
validated through an evaluation testbed composed
with video sequences including various difficulties.
But some flaws still remain, notably the fact that
errors propagate through the sequence. To overcome
this problem, we would like to label each points
“object” or “background”. These labels will further
be used, to enhance the bounding box repositioning
algorithm by maximising the number of “object”
points inside the bounding box and minimizing the
“background” ones. A probabilistic matching
algorithm using the point’s neighbourhood relations
is also being studied.
REFERENCES
Comaniciu D., Meer P., 2002, Mean Shift: A Robust
Approach Toward Feature Space Analysis, IEEE
Trans. Pattern Anal. Mach. Intell. 24(5): 603-619.
Dufournaud Y., Schmid C., Horaud R., June 2000,
Matching Images with Different Resolutions,
International Conference on Computer Vision &
Pattern Recognition.
Gabriel P., Hayet J.-B., Piater J., Verly J., 2005, Object
Tracking Using Color Interest Points, in Proc. of the
IEEE Int. Conf. on Advanced Video and Signal based
Surveillance (AVSS'05).
Gouet V., Oct 2000, Mise en correspondance d'images en
couleur - Application à la synthèse de vues
intermédiaires, Thèse de doctorat, Université de
Montpellier II.
Gyaourova A., Kamath C., and Cheung S.-C., October
2003, Block matching for object tracking, LLNL
Technical report,. UCRL-TR-200271.
Harris C., Stephens M.J., 1988, A combined corner and
edge detector, In Alvey vision conference, pp147-152.
Hu W., Tan T., Wang L., Aug 2004, M. S, A survey on
visual surveillance of object motion and behaviors,
IEEE Transactions on Systems, Man and Cybernetics,
Part C, Vol. 34, No 3, pp. 334- 352.
Isard M. and MacCormick J., 2001, BraMBLe: A
Bayesian Multiple-Blob Tracker Proc Int. Conf.
Computer Vision, vol. 2, 34-41.
Jaffré G., Crouzil A, 2003, Non-rigid object localization
from color model using mean shift, ICIP (3), 317-320.
Karaulova IA, Hall P, Marshall A., 2000, A hierarchical
model of dynamics for tracking people with a single
video camera. In: Mirmehdi M, Thomas B, editors.
Proceedings of the Eleventh British Machine Vision
Conference (BMVC2000), p. 352--61. Bristol: ILES
Press.
Moravec, H.P, 1980, Obstacle avoidance and navigation in
the real world by a seeing robot rover, Tech. Rept,
CMU-RI-TR-3, The Robotic Institute, Carnegie-
Mellon University, Pittsburgh, PA.
Mikolajczyk K., Schmid C., May 2001, Indexation à l'aide
de points d'intérêt invariants à l'échelle Journées
ORASIS GDR-PRC Communication Homme-Machine.
Mikolajczyk K., Schmid C., 2005-1, A performance
evaluation of local descriptors, IEEE Transactions on
Pattern Analysis & Machine Intelligence, Volume 27,
Number 10.
Mikolajczyk K., Tuytelaars T., Schmid C., Zisserman A.,
Matas J., Schaffalitzky F., Kadir F., Van Gool L.,
2005-2, A comparison of affine region detectors,
International Journal of Computer Vision, Volume 65,
Number ½.
Mindru F., Tuytelaars T., Van Gool L., Jul.2003, Moment
Invariants for Recognition under Changing Viewpoint
and Illumination, Theo Moons,ACM.
Montesinos P., Gouet V., Deriche R., 1998, Differential
invariants for color images, International conference
on pattern recognition.
Pupilli, M., and Calway, A., 2005, Real-Time Camera
Tracking Using a Particle Filter, In Proceedings of the
British Machine Vision Conference, BMVA Press.
Schmid C. and Mohr R., 1997, Local Greyvalue Invariants
for Image Retrieval, IEEE Transactions on Pattern
Analysis and Machine Intelligence.
Techmer A., 2001, Contour-based motion estimation and
object tracking for real-time applications. In
International Conference on Image Processing,
volume 3, pages 648--651, Thessaloniki, Greece, 87.
GENERIC OBJECT TRACKING FOR FAST VIDEO ANNOTATION
425
a
b
c
d
e
f
Figure 4: Tracking examples of our algorithm on several videos. Matched keypoints are in white, unmatched ones in black
(a-b) “soccer” sequence and the corresponding zoom for the frames 0, 30, 70 (c) “cooking” sequence for the frames 0, 30,60
(d) “cognac sequence for the frames 0, 10, 15 (e) “frying pan” sequence for the frames 25, 50, 75 (f) frames 0,60,120 for the
“fashion” sequence.
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
426
