
COLOR CALIBRATION OF AN ACQUISITION DEVICE
Method, Quality and Results
V.Vurpillot, A.Legrand, A.Tremeau
Ligiv, Universite Jean Monnet, 18 rue Benoit Laurast, Saint Etienne, France
Keywords: Color calibration, spectral, sensitivity recovery, correction quality, reconstruction errors.
Abstract: Color calibrated acquisition is of strategic importance when high quality imaging is required, such as for
work of art imaging. The aim of calibration is to correct raw acquired image for the various acquisition
device signal deformation, such as noise, lighting uniformity, white balance and color deformation, due, for
a great part, to camera spectral sensitivities. We first present reference color data computation obtained from
camera’s spectral sensitivities and reflectance of reference patches, taken form Gretag MacBeth Color Chart
DC. Then we give a color calibration method based on linear regression. We finally evaluate the quality of
applied calibration and present some resulting calibrated images.
1 INTRODUCTION
This study presents a method of calibration for a
color acquisition system. Once the whole system has
been characterized, the next step consists in
calibrating this system to get data that are
independent face to all possible acquisition system
parameters evolution during the various acquisition.
In order to be able to carry out such a calibration
method, the color data which will stand as reference
for calibration must be determined. In this purpose,
the most accurate estimation of acquisition system
spectral sensitivity curves has to be performed. Error
computation from results of the various known
methods allows to select the method providing the
best results. This study describes some methods and
results.
Calibration methods can then be developed. We
present the established calibration method for our
system, with analysis on its quality, and on its
carrying out on some works of art.
Image acquisition process is known as
interaction between illumination spectral
distribution, object spectral reflectance and imaging
system characteristics. We denote the linearized
sensor response for the k
th
channel (R, G or B, or
monochrome) by C
k
, the linearization function by F,
the exposure time by e, the sensor noise for the k
th
channel by b
k
, the sensor spectral sensitivity function
for the k
th
channel S
k
(λ), by L(λ) the total incident
light on sensor (illumination * reflectance) and the
spectral range [λ
l
- λ
h
]. The camera response C
k
, for
an image pixel, is determined by equation (1).
()()
h
l
kk k
CFeS L b
λ
λλ
λλλ
=
⎛⎞
=Δ+
⎜⎟
⎝⎠
∑
(1)
2 REFERENCE COLOR DATA
Our calibration aims to transform acquired raw RGB
data to a fixed and determined RGB space, in order
to get similar and comparable color data, whatever
the acquisition time, possible evolution in lighting
distribution and in system spectral sensitivity. Here,
the chosen RGB space is related to the system: it can
be obtained from system spectral sensitivity curves
and lighting spectral distribution. The reference
chart used for calibration is the Gretag MacBeth
Color Chart DC (240 patches). Thus, we first need to
know these patches’ RGB theoretical values in our
defined RGB space.
157
Vurpillot V., Legrand A. and Tremeau A. (2007).
COLOR CALIBRATION OF AN ACQUISITION DEVICE - Method, Quality and Results.
In Proceedings of the Second International Conference on Computer Vision Theory and Applications - IFP/IA, pages 157-160
Copyright
c
SciTePress
2.1 Recovering Spectral Sensitivity
The first step consists in finding the most accurate
spectral sensitivity curves of our acquisition system
(channel R, G and B).
A classification of the most common methods can be
given in two paradigms, indirect estimations and
direct measurement methods which we will not
detail here. Resulting curves are given for our
acquisition system.
Many indirect estimation methods have been
tested: by Pseudo-Inverse (Quan, 2003), by selecting
principal eigen vectors (Hardeberg, 2000), by adding
a smoothing constraint (Paulus, 2002), by mixing the
two precedents methods (Paulus, 2002), and by
combining basis functions, (Quan, 2003).
Another range of methods consists in finding
sensitivity curves by direct determination (Vora and
Farrell, 1997). We consider here camera responses
to narrowband sampling of illumination.
In order to estimate sensitivity reconstruction
validity and to select the one giving the most
accurate results, errors in reconstruction have to be
evaluated. This is achieved by estimating 540
patches P
E
from computed sensitivity curves (2).
()()
()
E
PSL
λ
λ
λ
=
∑
(2)
Various error computations are made, such as
mean and maximum absolute and relative errors,
standard deviation and RMS, for each channel and
each of the recovered sensitivity curves.
A first analysis of computed errors leads us to
select one method of estimation and one direct
measurement method among all recovered curves.
Comparing both leads to conclusion that, although
methods are unconnected, error results are really
closed. As carrying out an estimation method is
faster, it will be kept rather than direct measurement.
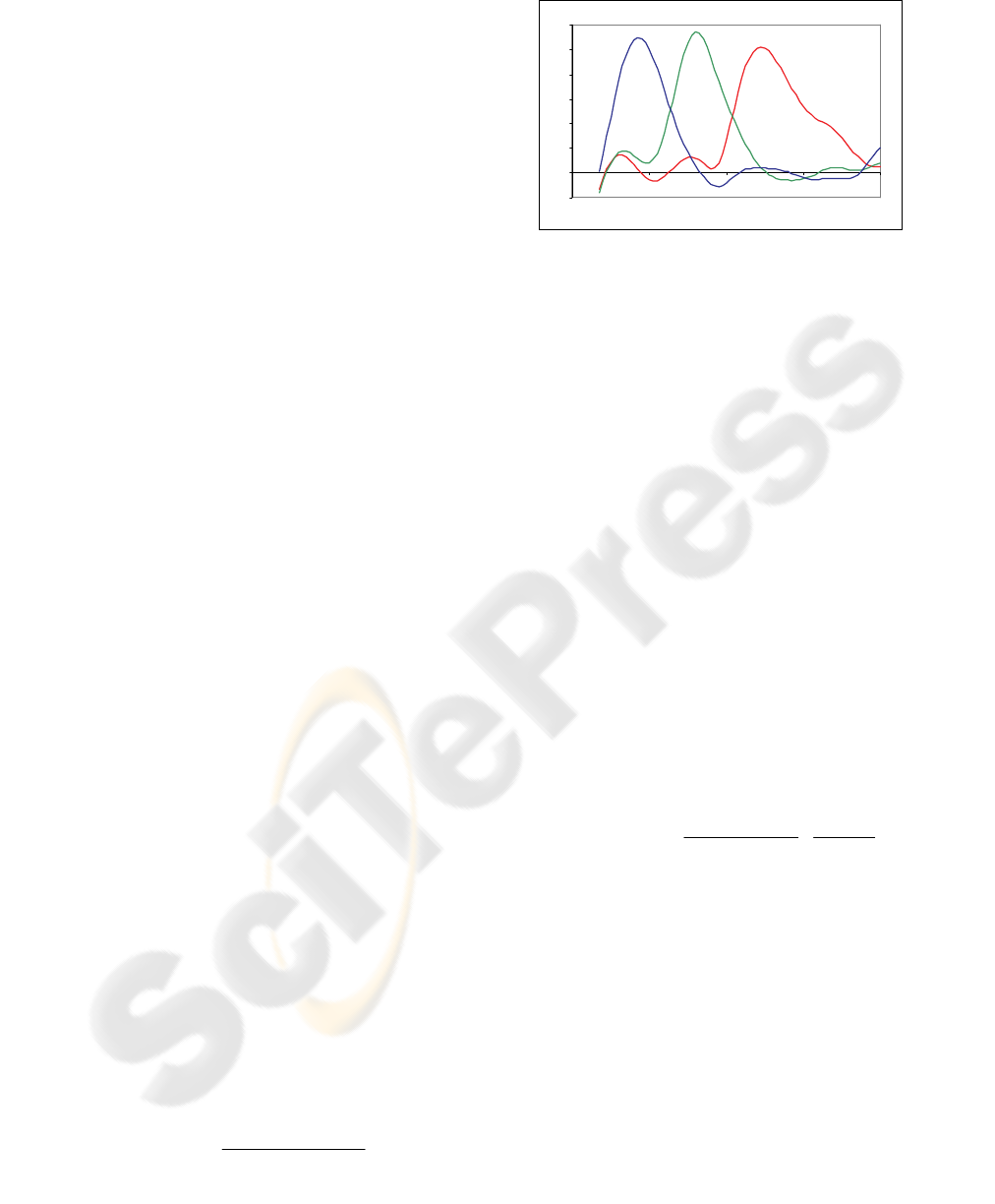
The selected method is the one using smoothing
constraint. This curve is shown in Figure 1.
2.2 Theoretical Color Computation
From these sensitivity curves, theoretical patches
can be computed (equation 3). They will stand as
basis for color calibration. To get this theoretical set
of RGB patches (Patch
Theo,k
), a white balance
SysBal
k
is applied.
() ()
(
)
,
.
k
Theo k
k
SL
Patch
SysBal
λ
λ
λ
=
∑
(3)
-50 0
0
50 0
1000
15 0 0
2000
2500
3000
380 480 580 680 780
W aveleng t h( nm)
Sensit ivity
Figure 1 : Resulted Sensitivity curves estimation
It corrects system white deformation due to S
λ,k
,
while keeping the white relative to illuminant,
chosen such that color can be well rendered.
3 CALIBRATION
To calibrate the system, three acquisition steps are
required for correction. These corrections will also
be applied to chart acquisition itself, to get correct
mean values of acquired patches in order to calculate
transformation.
3.1 Calibration Steps
First acquisition consists in recording a dark image.
Let Im
obs
be this image. Next acquisition, Im
Unif,k
,
intends to correct lighting and system acquisition
non-uniformities (lens + RGB sensor), with a white
chart. This double correction is applied with
following equation (4), correction to which is added
white balance (described previously):
kobskUnif
obsk
kUnifkCor
SysBal
Ratio
1
*
ImIm
ImIm
*Im
,
,,
−
−
=
(4)
Ratio
Unif ,k
is chosen in such a way that the RGB
values of a pixel which coordinates correspond to a
maximum value in uniformity image, remain the
same.
The final calibration step consists in computing
color transformation. It will make possible to change
from acquired raw chart patches over theoretical
patches. In practice, numerous transformation
matrixes are computed for our calibration,
corresponding to different integration times,
determined from regularly sampling time range.
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
158

Figure 3 : Diagram of the different steps required to get RGB transformation for calibration
Once the chart acquired, it is corrected following
equation (4). Then, only “linear” mean value of the
patches set are kept for transformation computation:
the three R, G and B values of these patches must
stand in the sensor linearity range (above noise and
below saturation knee). The number of kept patches
is dependant of the considered integration time. All
steps are summed up in Figure 3.
3.2 Transformation Computation
Let Patch
Acqui,k
the acquired patches set, for a chosen
integration time. The transformation we obtained has
been selected among various methods, adapted from
Martin Solli’s methods (Solli, 2004). A linear
regression has to be performed.
The simple and general transformation is given
by equation (5):
)(
AcquiTheo
PatchgPatch =
(5)
An approximation of g-function can be
expressed by the following expression (6):
avPatchsg
t
Acqui
=)(*
(6)
with v the corresponding vectors of Patch
Acqui
.
(vector v is M functions h
i
(x) of Patch
Acqui
). Vector a
(M coefficients) which minimizes RMS difference
between acquired and theoretical data, is given by
the Moore Penrose pseudo-inverse resolution.
An important step then consists in choosing the
right parameters in v vector. We have tested many of
these parameters and the one we kept for our
calibration, after a similar study on errors than
previously, is the one called “combined order
polynomial regression” (Orava, 2004).
3.3 Quality Measurement
As observed previously, for each integration time
used for calibration, the number of kept patches
varies. We need to know if some criteria of quality
can be determined, in order to decide whether the set
of patches are representative of the color space or
not, and thus to validate calibration quality.
A first evaluation on patches is made on their
repartition in the camera RGB cube. This repartition
can be represented, as well as its projection on the
three different RG, GB and RB plans. An example
of it is given for two integration times, under a D65
lighting (figure 3). Same measurements have been
done under a other illuminant (halogen lighting).
For low integration times, patches projection is
concentrated in low values space: thus, this space is
precisely sampled, but not very representative of the
remainder of RGB cube. The more integration time
grows, the more RGB cube is represented by patches
(better under D65 lighting than under halogen
lighting), but coarser the sampling is and lower the
number of kept patches is (saturated patches
increasing). Statistics on relative and absolute errors
have been calculated, for various combinations of
calibration and patches.
For each test, error evolution is the same. At low
integration times, error is high. It then decreases
down to a floor, value which is kept during an
important integration time range. It finally
significantly grows for higher integration times.
Noise correction of uniformity chart
Noise acquisition
RGB acquisition of the white chart
RGB uniformity ratios computation
System white balance
Theoretical
p
atches
Chart RGB acquisition
Chart correction for noise,
uniformity and white balance
Mean patches computation
Transformation computation
End
Integration time selection
Calibration quality estimation
COLOR CALIBRATION OF AN ACQUISITION DEVICE - Method, Quality and Results
159

Figure 4 : Repartition of RGB patches in camera RGB cube, and on RG, RB, GB projection plans for
integration time of 62.5ms (right) and 500ms(left).
Considering that an error variation above 200%
of its lowest level, implies that this error is not
acceptable, for calibration with 170 patches, whether
being under D65 or under halogen illuminant, more
than 50% of the whole patches set have to be kept in
order to get R, G and B errors in this range.
The various results show that only considering a
number of patches is not sufficient. Criterion of
calibration quality also depends on lighting and
chart. Only knowing these conditions allows such a
criterion: for D65 lighting with a Gretag MacBeth
Color DC chart, calibration gives little errors, if the
number of kept patches, is higher than 50% of the
170 original patches.
Other aspects have to be taken into account: if
integration time is low, when considering patches
that are projected outside the restrained represented
volume, committed errors are then very high, as
those patches have not been taken into account when
calibration matrix has been computed.
4 CONCLUSION
Once calibration data are computed, a raw
acquisition of any object can be corrected and
calibrated. Different steps are then required.
First a selection of the integration time is
automatically done by dichotomy. Then, the
calibration matrix corresponding to the nearest
integration time using during calibration step is
selected. Raw RGB acquisition is then
accomplished. Calibration steps remain: correction
for noise, for non-uniformity and for white balance
following equation (4) is performed, then a linear
transformation of the data is done (to make
integration time used during acquisition and the one
used during calibration correspond). Calibration
matrix can next be applied, followed by the inverse
linear transformation.
We have carried out a calibration method, with
all required step, and tested quality of this
calibration in function of integration time. Our final
calibrated images show very good results. Further
works could be applied on calibration quality.
REFERENCES
Hardeberg, J. Y., Brettel, H., Schmitt, F. (2000) ‘Spectral
Characterisation of Electronic Cameras’, Proc.
EUROPTO Conference on Electronic Imaging, SPIE,
pp.36-46.
Orava, J., Jaaskelainen, T., Parkkinen, J. (2004) ‘Color
errors of Digital Cameras’, Color Research and
Application, vol.29, issue 3, June, pp.217-221.
Paulus, D., Hornegger, J., Csink, L. (2002) ‘Linear
Approximation of Sensitivity Curve Calibration’, The
5th Workshop Farbbildverarbeitung, Ilmeneau, pp.3-
10.
Quan, S., Ohta, N., Jiang, X. (2003), ‘A Comparative
Study on Sensor Spectral Sensitivity Estimation’,
SPIE-IS&T Electronic Imaging, SanJose, vol.5008,
pp.209-220.
Vora, P.L., Farell, J.E., Tietz, J.D., Brainard, D. (1997)
Digital Color Cameras, Hewlett Packard Company
Technical Report, March, 1997.
Solli, M., (2004) Filter characterization in digital
cameras, Linkönig university Electronic Press.
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
160
