
COMBINATION OF VIDEO-BASED CAMERA TRACKERS USING
A DYNAMICALLY ADAPTED PARTICLE FILTER
David Marimon and Touradj Ebrahimi
Signal Processing Institute
Swiss Federal Institute of Technology (EPFL)
Lausanne, Switzerland
Keywords:
Sensor fusion, video camera tracking, particle filter, adaptive estimation.
Abstract:
This paper presents a video-based camera tracker that combines marker-based and feature point-based cues in
a particle filter framework. The framework relies on their complementary performance. Marker-based trackers
can robustly recover camera position and orientation when a reference (marker) is available, but fail once the
reference becomes unavailable. On the other hand, feature point tracking can still provide estimates given a
limited number of feature points. However, these tend to drift and usually fail to recover when the reference
reappears. Therefore, we propose a combination where the estimate of the filter is updated from the individual
measurements of each cue. More precisely, the marker-based cue is selected when the marker is available
whereas the feature point-based cue is selected otherwise. The feature points tracked are the corners of the
marker. Evaluations on real cases show that the fusion of these two approaches outperforms the individual
tracking results.
Filtering techniques often suffer from the difficulty of modeling the motion with precision. A second related
topic presented is an adaptation method for the particle filer. It achieves tolerance to fast motion manoeuvres.
1 INTRODUCTION
Combination of tracking techniques has proven to be
necessary for some camera tracking applications. To
reach a synergy, techniques with complementary per-
formance have first to be identified. Research on cam-
era tracking has concentrated on combining sensors
within different modalities (e.g. inertial, acoustic, op-
tic). However, this identification is possible within
a single modality: video trackers. Video-based cam-
era tracking can be classified into two categories that
have compensated weaknesses and strengths: bottom-
up and top-down approaches (Okuma et al., 2003).
For the first category, the six Degrees of Freedom
(DoF), 3D position and 3D orientation, estimates are
obtained from low-level 2D features and their 3D geo-
metric relation (such as homography, epipolar geom-
etry, CAD models or patterns), whereas for the sec-
ond group, the 6D estimate is obtained from top-down
state space approaches using motion models and pre-
diction. Marker-based systems (Zhang et al., 2002)
can be classified in the first group. Although they
have a high detection rate and estimation speed, they
still lack tracking robustness: the marker(s) must be
always visible thus limiting the user actions. In con-
trast to bottom-up approaches, top-down techniques
such as filter-based camera tracking allow track con-
tinuation when the reference is temporarily unavail-
able (e.g. due to occlusions). They use predictive
motion models and update them when the reference
is again visible (Davison, 2003; Koller et al., 1997;
Pupilli and Calway, 2005). Their weakness is, in gen-
eral, the drift during the absence of a stable reference
(usually due to feature points difficult to recognise af-
ter perspective distortions).
Filtering techniques often suffer from the diffi-
culty of modelling the motion with precision. More
concretely, the errors in the system of equations are
usually modelled with noise of fixed variance, also
called hyper-parameter. In practice, these variances
are rarely constant in time. Hence, better accuracy
is achieved with filters that adapt, or self-tune, the
hyper-parameters online (Maybeck, 1982).
In this paper, we present a particle-filter based
363
Marimon D. and Ebrahimi T. (2007).
COMBINATION OF VIDEO-BASED CAMERA TRACKERS USING A DYNAMICALLY ADAPTED PARTICLE FILTER.
In Proceedings of the Second International Conference on Computer Vision Theory and Applications - IU/MTSV, pages 363-370
Copyright
c
SciTePress

camera tracker that dynamically adapts its hyper-
parameters. The main purpose of this framework is
to take advantage of the complementary performance
of two particular video-trackers. The system com-
bines the measurements of a marker-based cue (MC)
and a feature point-based cue (FPC). The MC tracks a
square marker using its contour lines. The FPC tracks
the corners of the marker. Besides this novel combi-
nation, an adaptive estimator is also proposed. The
process noise model is adapted online to prevent de-
viation of the estimate in case of fast manoeuvres as
well as to keep precise estimates during slow motion
stages.
The paper is structured as follows. Section 2 de-
scribes similar works. The techniques involved in the
combination and the proposed tracker are presented in
Section 3. Several experiments and results are given
in Section 4. Conclusions and future research direc-
tions are finally discussed.
2 RELATED WORK
In hybrid tracking, systems that combine diverse
tracking techniques have shown that the fusion ob-
tained enhances the overall performance (Allen et al.,
2001).
The commonly developed fusions are inertial-
acoustic and inertial-video (Allen et al., 2001). In-
ertial sensors usually achieve better performance for
fast motion. On the other hand, in order to compen-
sate for drift, an accurate tracker is needed for period-
ical correction. Video-based tracking performs better
at low motion and fails with rapid movements. During
the last decade, interest has grown on combining in-
ertial and video. Representative works are those pre-
sented by Azuma and by You. Azuma used inertial
sensors to predict future head location combined with
an optoelectrical tracker (Azuma and Bishop, 1995).
As presented in (You et al., 1999), the fusion of gyros
and video tracking shows that computational cost of
the latter can be decreased by 3DoF orientation self-
tracking of the former. It reduces the search area and
avoids tracking interruptions due to occlusion. Sev-
eral works have combined marker-based approaches
with inertial sensors (Kanbara et al., 2000; You and
Neumann, 2001). (You and Neumann, 2001) pre-
sented a square marker-based tracker that fuses its
data with an inertial tracker, in a Kalman filtering
framework. Among the existing marker-based track-
ers, two recent works, (Claus and Fitzgibbon, 2004)
and (Fiala, 2005) stand out for their robustness to il-
lumination changes and partial occlusions. (Claus and
Fitzgibbon, 2004) takes advantage of machine learn-
ing techniques, and trains a classifier with a set of
markers under different conditions of light and view-
point. No particular attention is given to occlusion
handling. (Fiala, 2005) uses spatial derivatives of
grey-scale image to detect edges, produce line seg-
ments and further link them into squares. This link-
ing method permits the localisation of markers even
when the illumination is different from one edge to
the other. The drawback of this method is that mark-
ers can only be occluded up to a certain degree. More
precisely, the edges must be visible enough to produce
straight lines that cross at the corners.
However, little attention has been given to fus-
ing diverse techniques from the same modality. Sev-
eral researchers have identified the potential of video-
based tracking fusion (Najafi et al., 2004; Okuma
et al., 2003; Satoh et al., 2003). However, (Okuma
et al., 2003) is the only reported work to fuse data
from a single camera. Their system switches be-
tween a model-based tracker and a feature point-
based tracker, similar to that of (Pupilli and Calway,
2005). Nonetheless, this framework takes limited ad-
vantage of the filtering framework and still needs the
assistance of an inertial sensor. Combination of low-
level features has been addressed in (Vacchetti et al.,
2004). Edge and feature points are used for model-
based tracking of textured and non-textured objects.
Online hyper-parameter adaptation has been ap-
plied to video tracking with growing interest. (Chai
et al., 1999) presented a multiple model adaptive esti-
mator for augmented reality registration. Each model
characterises a possible motion type, namely fast and
slow motion. Switching is done according to cam-
era’s prediction error. Although multiple models may
seem an attractive solution, several works have iden-
tified their drawbacks. When the state space is large,
the number of necessary models becomes untractable
and their quantisation must be fine enough in order to
obtain good accuracy (Ichimura, 2002). (Ichimura,
2002) and, more recently, (Xu and Li, 2006) have
shown the advantages of tuning the hyper-parameters
with a single motion model. Both have employed
online tuning for 2D tracking purposes. (Ichimura,
2002) presented an adaptive estimator that consid-
ers the hyper-parameters as part of the state vector.
Whilst providing good results, this technique adds
complexity to the filter and moves the problem to the
hyper-hyper-parameters that govern change in hyper-
parameters. (Xu and Li, 2006) presents a simpler
adaptation algorithm that calculates a similarity of
predictions between frames and updates the hyper-
parameters accordingly. As described in Section 3.5,
the adaptation method presented here is closer to this
technique.
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
364

3 SYSTEM DESCRIPTION
This section describes the particle filter, how the
marker-based and the feature point-based cues are ob-
tained, as well as the procedure used to fuse them in
the filter. The dynamic tuning of the filter is also ex-
posed.
3.1 Particle Filter
We target applications where the camera is hand-held
or attached to the user’s head. Under these circum-
stances, Kalman filter-based approaches although ex-
tensively used for ego motion tracking, lead to a non
optimal solution because the motion is not white nor
has Gaussian statistics (Chai et al., 1999). To avoid
the Gaussianity assumption, we have chosen a camera
tracking algorithm that uses a particle filter. More pre-
cisely, we have chosen a sample importance resam-
pling (SIR) filter. For more details on particle filters,
the reader is referred to (Arulampalam et al., 2002).
Each particle n in the filter represents a possible
transformation
T
n
= [t
X
,t
Y
,t
Z
,rot
W
,rot
X
,rot
Y
,rot
Z
]
n
, (1)
where t are the translations and rot is the quaternion
for the rotation. T determines the 3D relation of the
camera with respect to the world coordinate system.
We have avoided adding the velocity terms so as not
to overload the particle filter (which would otherwise
affect the speed of the system).
For each video frame, the filter follows two steps:
prediction and update. The probabilistic motion
model for the prediction step is defined as follows.
The process noise (also known as transition prior
p(T
n
(k)|T
n
(k − 1)) ) is modelled with a Uniform dis-
tribution centred at the previous state T
n
(k −1) (frame
k − 1), with variance q (process noise’s -also called
system noise- vector of hyper-parameters). The rea-
son for this type of random walk motion model is to
avoid any assumption on the direction of the motion.
This distribution enables faster reactivity to abrupt
changes. The propagation for the translation vector
is
T
n
(k)
t
X
,t
Y
,t
Z
= T
n
(k − 1)
t
X
,t
Y
,t
Z
+ u
t
(2)
where u
t
is a random variable coming from the uni-
form distribution, particularised for each translation
axis. The propagation for the rotation is
T
n
(k)
rot
= u
rot
× T
n
(k − 1)
rot
(3)
where × is a quaternion multiplication and u
rot
is
a quaternion coming from the uniform distribution
of the rotation components. In the update step, the
Figure 1: Square marker used for the MC.
weight of each particle n is calculated using its mea-
surement noise (likelihood)
w
n
= p(Y |T
n
), (4)
where w
n
is the weight of particle n and Y is the mea-
surement. The key role of the combination filter is to
switch between two sorts of likelihood depending on
the type of measurement that is used: MC or FPC.
Once the weights are obtained, these are normalised
and the update step of the filter is concluded. The cor-
rected mean state
b
T is given by the weighted sum of
T
n
.
b
T is used as output of the camera tracking system.
3.2 Marker-based Cue (MC)
We use the marker-based system provided by (Kato
and Billinghurst, 1999) to calculate the transforma-
tion T between the world coordinate frame and that of
the camera (3D position and 3D orientation). As ex-
plained in Section 3.4, this transformation is the mea-
surement fed into the filter for update.
At each frame, the algorithm searches for a square
marker (see Figure 1) inside the field-of-view (FoV).
If a marker is detected, the transformation can be
computed. The detection process works as follows.
First, the frame is converted to a binary image and the
black marker contour is identified. If this identifica-
tion is positive, the 6D pose of the marker relative to
the camera (T ) is calculated. This computation uses
only the geometric relation of the four projected lines
that contour the marker in addition to the recognition
of a non-symmetric pattern inside the marker (Kato
and Billinghurst, 1999). When this information is not
available, no pose can be calculated. This occurs in
the following cases: markers are partially or com-
pletely occluded by an object; markers are partially
or completely out of the FoV; or not all lines can be
detected (e.g., due to low contrast).
3.3 Feature Point-based Cue (FPC)
In order to constrain the camera pose estimation, the
back-projection of salient or feature points in the
scene can be used. For this purpose, both the 3D loca-
tion of the feature point P and the 2D back-projection
p is needed. In homogeneous coordinates,
p = K · [R|t] · P, (5)
COMBINATION OF VIDEO-BASED CAMERA TRACKERS USING A DYNAMICALLY ADAPTED PARTICLE
FILTER
365
where K is the calibration matrix (computed off-line),
R is the rotation matrix formed using the quaternion
rot and t = [t
X
,t
Y
,t
Z
]
T
is the translation vector.
Among the available feature points in the scene,
we have selected the corners of the marker because
their 3D location in the world coordinate frame is
known. The intensity level information is chosen as a
description of these feature points, for further recog-
nition. A template of each corner is defined with the
16x16 pixel patch around the corner’s back-projection
in the image plane. This template is stored at initiali-
sation.
At runtime, these feature points are searched in
the video frame. A region is defined around the esti-
mated location of each feature point. Assume, for the
moment, that these regions are known. Each region is
cross-correlated with the template of the correspond-
ing feature point, thus resulting in a correlation map.
As explained in the next section, the set of cor-
relation maps is the measurement fed into the filter
for update. Each template that is positively correlated
makes the filter converge to a more stable estimate.
Three points are necessary to robustly determine the
six DoF. However, the filter can be updated even with
only one feature point. A reliable feature point might
be unavailable in the following situations: a corner is
occluded by an object; a corner is outside of the FoV;
the region does not contain the feature point (due to a
bad region estimation); or the feature point is inside
the region but no correlation is beyond the threshold
(e.g., because the viewpoint is drastically changed).
3.4 Cues Combination
The goal of the system is to obtain a synergy by com-
bining both cues. Individual weaknesses previously
described are thus lessened by this combination. Spe-
cial attention is given to the occlusion and illumina-
tion problems in the MC and the viewpoint change in
the FPC.
At initialisation, the value of all particles of the
filter is set to the transformation estimated by the
marker-based cue T
MC
.
As long as the the marker is detected, the system
uses the MC measurement to update the particle filter
(Y = T
MC
). The likelihood is modelled with a Cauchy
distribution centered at the measurement T
MC
p(T
MC
|T
n
) =
∏
i
r
i
π · ((T
n,i
− T
MC,i
)
2
+ r
2
i
)
, (6)
where r is the measurement noise and i indexes the
elements of the vectors. This particular distribu-
tion’s choice has its origin in the following reason-
ing. In the resampling step of the filter, particles
with insignificant weights are discarded. A problem
may arise when the particles lie on the tail of the
measurement noise distribution. The transition prior
p(T
n
(k)|T
n
(k − 1)) determines the region in the state-
space where the particles fall before their weighting.
Hence, it is relevant to evaluate the overlap between
the likelihood distribution and the transition prior dis-
tribution. When the overlap is small, the number of
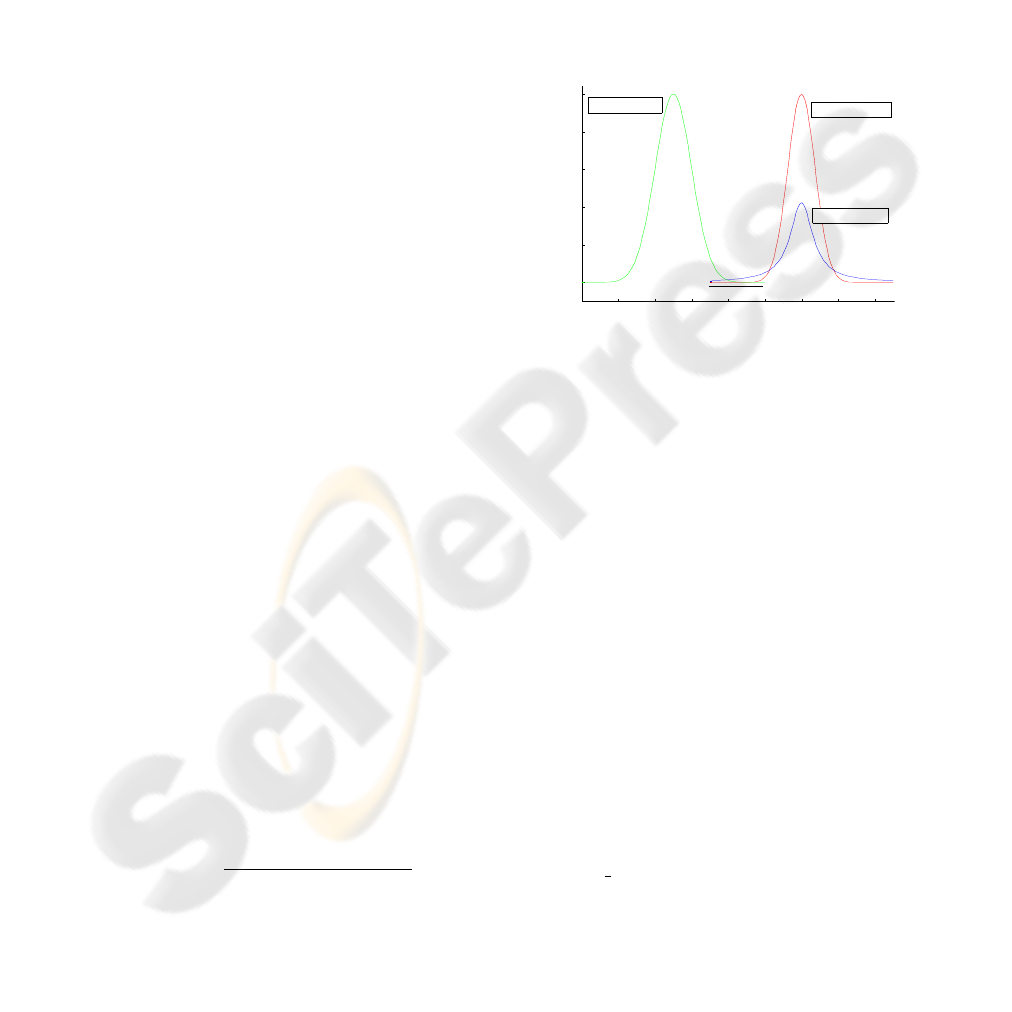
particles effectively resampled is too small. Figure 2
shows an instance of overlapping region. It must be
pointed out that due to computing limits, some values
fall to zero even though their real mathematical value
is greater than that (the support of a Gaussian distri-
bution is the entire real line). In the example of this
−12 −10 −8 −6 −4 −2 0 2 4
0
0.2
0.4
0.6
0.8
1
T(k)
Probability
p(T(k) | T(k−1)) for a
generic distribution
p(Y(k) | T(k)) for a
Gaussian distribution
p(Y(k) | T(k)) for a
Cauchy distribution
Figure 2: Overlap between transition prior distribution and
the likelihood distribution: modelled with a Gaussian (no
overlap) and with a Cauchy distribution (thick line).
figure, there is no sufficient computed overlap for the
Gaussian distribution (commonly used), whereas the
tail of the Cauchy distribution covers the necessary
state-space. Therefore, we have chosen a long-tailed
density that better covers the state-space, while still
being a realistic measurement noise (Ichimura, 2002).
Once the weighting is computed, the templates asso-
ciated to each corner of the marker are also updated.
This is done every time the marker is detected. For
this purpose the patch around the back-projection of
each corner is exchanged with the previous template
description. As this template is used by the FPC, it is
important that the latest possible description is avail-
able. Contrary to what might be thought, template up-
dating does not introduce drift in this case. The patch
around the corner is a valid descriptor every time the
marker is detected.
On the other hand, when the MC fails to de-
tect the marker, the system relies on the FPC (Y =
correlation maps) and another likelihood is used. As
a previous step to obtaining the correlation maps pro-
vided by the FPC (see Section 3.3), it is necessary
to calculate the regions around the estimated location
of each feature point. For each corner, all the back-
projections given the transformations T
n
are computed
(see Eq. 5). The region is the bounding box contain-
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
366
ing all these back-projections. These bounding boxes
are fed into the FPC and the correlation maps are ob-
tained in return. The weights can then be calculated.
First, a set of 2D coordinates is obtained by thresh-
olding each correlation map.
S
j
=
[c
x
,c
y
]
correlation
map
j
(c
x
,c
y
) > th
corr
,
(7)
where j indexes the corners of the marker. Second,
for each particle, a subset is kept with the points in S
j
that are within a certain Euclidean distance from the
corresponding back-projection [p
n,x
, p
n,y
]
b
S
n, j
=
[c
x
,c
y
] ∈ S
j
dist(c, p
n
) < th
dist
. (8)
The weight of the particle n is proportional to the
number of elements (|.|) in the subsets
b
S
n, j
w
n
= exp(−
∑
j
S
n, j
). (9)
As it can be seen, the likelihood for the FPC measure-
ment is much less straightforward to compute than the
MC. Nevertheless, the weights can be calculated inde-
pendently of the number of feature points recognised
whereas the likelihood for the MC is available only if
the marker is visible.
Algorithm 1 expresses the process followed by the
combination. It is assumed that the filter has been ini-
tialised at the first detection of the marker. The de-
scription of the marker is stored in the pattern vari-
able.
Algorithm 1 Combination procedure.
loop
v f rame ← getVideoFrame()
marker ← detectMarker( v f rame )
if pattern.correspondsTo( marker ) then
T
MC
← MC.calcTransformation( marker )
templates ← extractPatches( marker , v f rame )
b
T ← filter.updateFromMC( T
MC
)
else
reg ← filter.calcRegions()
corr maps ← FPC.calcMaps( reg , templates )
b
T ← filter.updateFromFPC( corr maps )
end if
end loop
This filtering framework has several advantages.
Combination through a filter provides a continuous
estimate which is free of jumps that disturb the user’s
interaction. Frameworks often fall into static solu-
tions giving little opportunity for shaping. The like-
lihood switching method proposed is generic enough
to be used with very different types of cues or sensors
such as inertial, etc.
3.5 Dynamic Tuning of the Filter
The goal of the dynamic tuning is to achieve better
tracking accuracy together with robustness in front of
manoeuvres.
The long-tailed Cauchy-type distribution of the
measurement noise is not sufficient to cover the state-
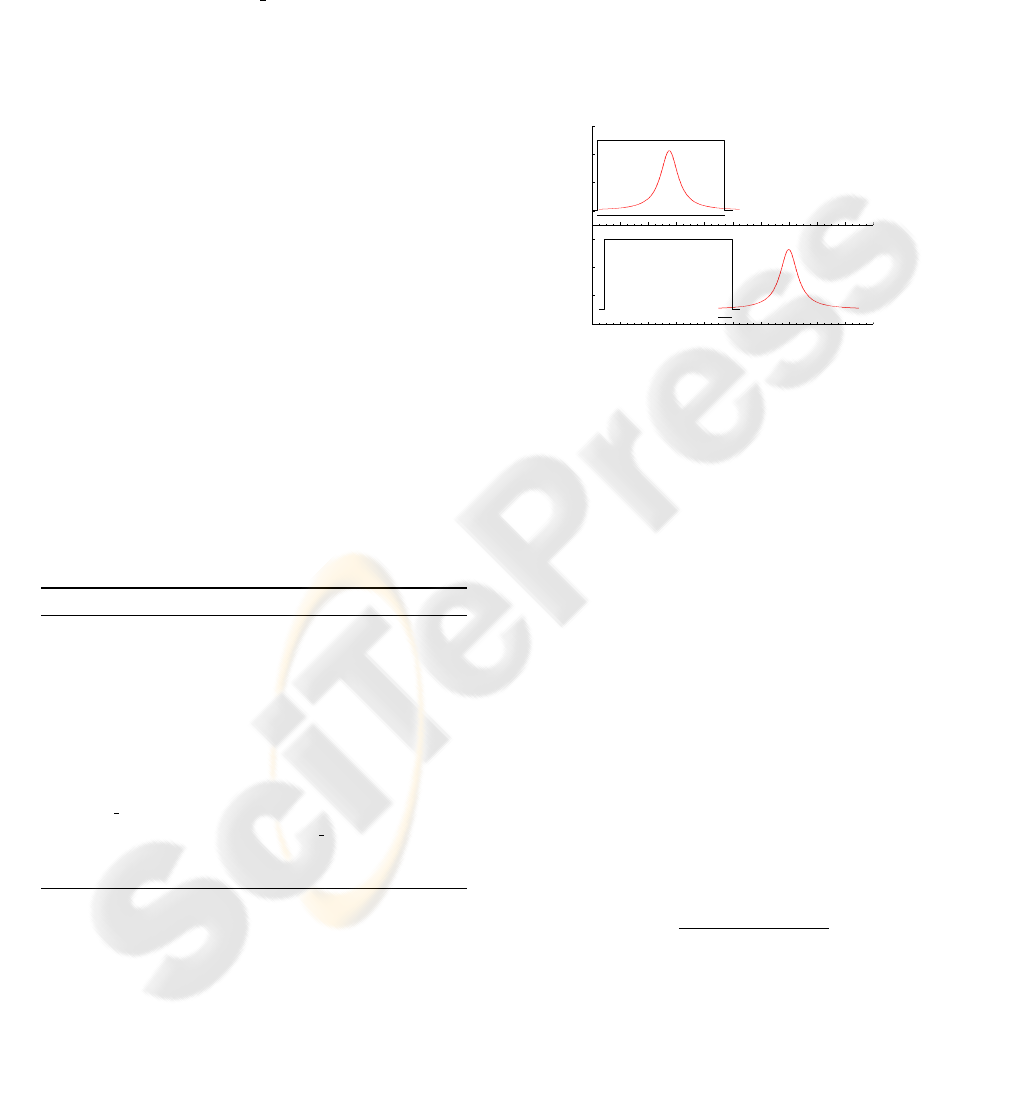
space in front of rapid manoeuvres. Figure 3 shows
the effect of a large manoeuvre on the probabilistic
model assumed. Again, the computing limits play a
role on the positive overlap of distributions.
Probability
T(k−1)
T(k)
Figure 3: Slow motion (top) and fast motion (bottom).
Overlap indicated with a thick line. When a fast manoeuvre
occurs, the overlap between transition prior (uniform distri-
bution) and the likelihood (cauchy distribution) is small.
Either the likelihood or the transition prior distri-
butions should broaden in order to face this problem.
The measurement noise model is related to the sen-
sor. Hence, the model should only be tuned if a qual-
ity value of the measurement provided by the sensor
is available. This quality value is usually unrelated
to motion and thus of no use to face the manoeuvre
problem. On the other hand, the process noise vari-
ance q is related to the motion model. We propose
to tune the process noise adaptively. As said before,
there are six DoF, three for orientation and three for
position. Practice demonstrates that motion changes
do not necessarily affect all axes in the same manner.
Contrary to the adaptive estimators cited before, we
propose a tuning that considers each degree of free-
dom independently. The process variance for each
axis q
i
is tuned according to the weighted distance
from the current corrected mean state
b
T
i
(k) to that in
the previous frame
b
T
i
(k − 1)
ϕ
i
=
[
b
T
i
(k) −
b
T
i
(k − 1)]
2
q
i
(k)
2
+ ∆
min
q
i
(k + 1) = max (q
i
(k) ·min (ϕ
i
;∆
max
);
e
q
i,min
), (10)
where ∆
min
and ∆
max
are the minimal and maximal
variations, respectively, and
e
q
i,min
is the lower bound
for the hyper-parameter of axis i. This method permits
a large dynamic range for the variance of each axis as
it uses the previous q
i
to calculate the current value. In
COMBINATION OF VIDEO-BASED CAMERA TRACKERS USING A DYNAMICALLY ADAPTED PARTICLE
FILTER
367

addition, it does not add complexity to the filter state
as in (Ichimura, 2002) nor to the system by means of
multiple model estimation as the system proposed in
(Chai et al., 1999).
4 EXPERIMENTS
In order to assess the performance of our fusion, we
compare the 6D pose of the camera estimated by
the system proposed by (Pupilli and Calway, 2005),
which we will call feature point-based camera tracker
FPCT, ARToolkit, which we will call marker-based
camera tracker MCT, and the corrected mean esti-
mate
b
T of our data fusion approach. A custom video
sequence is used as input for this purpose. In this se-
quence, the camera moves around a marker, and sev-
eral occlusions occur, either manually produced (by
covering the pattern) or happening when the marker
is partially outside of the FoV. The FPCT is initialised
once, at the beginning, using the estimate of the MCT.
Figure 4 shows the estimation of the FPCT and our
approach (one realisation). Note that the rotation is
expressed in Euler angles converted from the rotation
quaternion. The estimate of the MCT (green dots)
−100
0
100
Trans X [mm]
−100
0
100
Trans Y [mm]
400
600
800
Trans Z [mm]
0
200
400
Rot X [º]
−100
0
100
Rot Y [º]
0 100 200 300 400 500 600 700 800 900 1000
−200
0
200
Rot Z [º]
Frame
MCT FPCT Fusion
Figure 4: First experiment. Translation and rotation in X,Y
and Z axes. Shaded regions represent occlusions (Manually
produced: frames 182-246, 345-448. Marker partially out
of FoV: frames 655-744).
is difficult to observe because it is very close to the
filtered estimate of our approach, except during the
occlusions, where no output is produced at all. The
FPCT (inverted triangles) is capable of tracking de-
spite the first two occlusions. However, it looses track
after the third occlusion. This could be due to an in-
complete update step (only two 3D points are avail-
able while the marker is partially outside the FoV,
frames 655-744), leading to a bad prediction. As this
experiment illustrates, using the MC to update the
filter and the templates of the FPC produces better
results. In addition, using the FPC enables the fu-
sion to provide an estimate throughout the whole se-
quence. The fusion addresses the main drawbacks of
each component: partial occlusions for the MC, and
the viewpoint change for the FPC. Snapshots from
several frames of the augmented scene during occlu-
sions are shown in Figure 5.
(a) Occlusion (b) Escaping the FoV
Figure 5: First experiment. A virtual teapot placed on the
marker to show correct alignment.
In a second experiment, the adaptive filtering pro-
posed is compared to similar work. Xu (Xu and Li,
2006) presented an adaptation method for 2DoF that
can be extended in terms of Eq. (10) to 6DoF as fol-
lows
ϕ = exp
−0.5
∑
i
[
b
T
i
(k) −
b
T
i
(k − 1)]
2
e
q
2
i
!
q
i
(k + 1) = max
min
e
q
i
·
p
1/ϕ;
e
q
i,max
;
e
q
i,min
, (11)
where
e
q
max
and
e
q
min
are the upper and lower bound
vectors and
e
q
i
is the nominal value for axis i. Note that
e
q
i
,
e
q
i,max
and
e
q
i,min
are fixed offline to a single value
for the three rotation axes and another single value for
the three translation axes. Remark that the prediction
error in one axis affects all other hyper-parameters, as
ϕ is unique for all the axes. Consequently, the model
of process noise in one axis may grow even when
the real error in that axis is small. Moreover, the dy-
namic range of the variance of each axis is limited of-
fline whereas our proposed dynamic tuning has only
a lower bound to insure stability when motion is al-
most static. In order to compare the proposed method
to this approximation of Xu’s approach, a second cus-
tom video sequence with several abrupt manoeuvres
is used. The upper bound is fixed to the maximal
value achieved by our technique in this particular se-
quence. The lower bound is the same for both. The
variances in our method are initialised with the nomi-
nal values
e
q
i
. The variation bounds ∆
min
and ∆
max
are
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
368


Table 2: Mean frame rates achieved for the MCT and FPCT
individually, and for our fusion filter updated from one or
the other cue.
Tracker
frame rate [Hz]
MCT 26.9
FPCT (1000 particles) 19.1
Fusion (update with MC) 23.8
Fusion (update with FPC) 17.9
5 CONCLUSION
We have presented a combination of video trackers
within a particle filter framework. The filter uses two
cues provided by a marker-based approach and a fea-
ture point-based one. The motion model is adapted
online according to the distance between past esti-
mates.
Experiments show that the proposed combination
produces a synergy. The system tolerates occlusions
and changes of illumination. Independent adaptive
tuning for the model of each DoF demonstrates su-
perior performance in front of manoeuvres.
In our future research, we will focus on extending
the FPC to feature points beyond the four corners of
the marker and enhancing their viewpoint sensibility.
ACKNOWLEDGEMENTS
The first author is supported by the Swiss National
Science Foundation (grant number 200021-113827),
and by the European Networks of Excellence K-
SPACE and VISNET2.
REFERENCES
Allen, B., Bishop, G., and Welch, G. (2001). Tracking:
Beyond 15 minutes of thought. In SIGGRAPH.
Arulampalam, M., Maskell, S., Gordon, N., and Clapp,
T. (2002). A tutorial on particle filters for on-
line nonlinear/non-gaussian bayesian track ing. IEEE
Trans. on Signal Processing, 50(2):174–188.
Azuma, R. and Bishop, G. (1995). Improving static and
dynamic registration in an optical see-through HMD.
In SIGGRAPH, pages 197–204. ACM Press.
Chai, L., Nguyen, K., Hoff, B., and Vincent, T. (1999). An
adaptive estimator for registration in augmented real-
ity. In IWAR, pages 23–32.
Claus, D. and Fitzgibbon, A. (2004). Reliable fiducial de-
tection in natural scenes. In European Conference on
Computer Vision (ECCV), volume 3024, pages 469–
480. Springer-Verlag.
Davison, A. (2003). Real-time simultaneous localisation
and mapping with a single camera. In ICCV.
Fiala, M. (2005). ARTag, a fiducial marker system using
digital techniques. In CVPR, volume 2, pages 590–
596.
Ichimura, N. (2002). Stochastic filtering for motion trajec-
tory in image sequences using a monte carlo filter with
estimation of hyper-parameters. In ICPR, volume 4,
pages 68–73.
Kanbara, M., Fujii, H., Takemura, H., and Yokoya, N.
(2000). A stereo vision-based augmented reality sys-
tem with an inertial sensor. In ISAR, pages 97–100.
Kato, H. and Billinghurst, M. (1999). Marker tracking and
HMD calibration for a video-based augmented reality
conferencing system. In IWAR, pages 85–94.
Koller, D., Klinker, G., Rose, E., Breen, D., Wihtaker,
R., and Tuceryan, M. (1997). Real-time vision-based
camera tracking for augmented reality applications. In
ACM Virtual Reality Software and Technology.
Maybeck, P. S. (1982). Stochastic Models, Estimation, and
Control, volume 141-2, chapter Parameter uncertain-
ties and adaptive estimation, pages 68–158. Academic
Press.
Najafi, H., Navab, N., and Klinker, G. (2004). Automated
initialization for marker-less tracking: a sensor fusion
approach. In ISMAR, pages 79–88.
Okuma, T., Kurata, T., and Sakaue, K. (2003). Fiducial-
less 3-d object tracking in ar systems based on the in-
tegration of top-down and bottom-up approaches and
automatic database addition. In ISMAR, page 260.
Pupilli, M. and Calway, A. (2005). Real-time camera track-
ing using a particle filter. In British Machine Vision
Conference, pages 519–528. BMVA Press.
Satoh, K., Uchiyama, S., Yamamoto, H., and Tamura,
H. (2003). Robot vision-based registration utilizing
bird’s-eye view with user’s view. In ISMAR, pages
46–55.
Vacchetti, L., Lepetit, V., and Fua, P. (2004). Combining
edge and texture information for real-time accurate 3d
camera tracking. In ISMAR, Arlington, VA.
Xu, X. and Li, B. (2006). Rao-blackwellised particle fil-
ter with adaptive system noise and its evaluation for
tracking in surveillance. In Visual Communications
and Image Processing (VCIP). SPIE.
You, S. and Neumann, U. (2001). Fusion of vision and gyro
tracking for robust augmented reality registration. In
IEEE Virtual Reality (VR), pages 71–78.
You, S., Neumann, U., and Azuma, R. (1999). Hybrid iner-
tial and vision tracking for augmented reality registra-
tion. In IEEE Virtual Reality (VR), pages 260–267.
Zhang, X., Fronz, S., and Navab, N. (2002). Visual marker
detection and decoding in AR systems: A comparative
study. In ISMAR, pages 97–106.
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
370
