
DIFFERENNTIAL TECHNIQUE FOR MOTION COMPUTATION
USING COLOUR INFORMATION
T. Bouden and
(*)
N. Doghmane
NDT laboratory, Automatic Department, Engineering Faculty
BP°98 Ouled Aissa 18000 Jijel University, Algeria
(Temporary Trainee until August 2007: LIS/INPG Grenoble France)
(*)
Electronic Department, Campus Sidi Ammar 23000, Annaba University Algeria
Keywords: Differential techniques, optical flow, motion estimation and colour information.
Abstract: Optical flow computation is an important and challenging problem in the motion analysis of images
sequence. It is a difficult and computationally expensive task and is an ill-posed problem, which expresses
itself as the aperture problem. However, optical flow vectors or motion can be estimated by differential
techniques using regularization methods; in which additional constraints functions are introduced. In this
work we propose to improve differential methods for optical flow estimation by including colour
information as constraints functions in the optimization process using a simple matrix inversion. The
proposed technique has shown encouraging results.
1 INTRODUCTION
The recent developments in computer vision,
moving from static images analysis to video
sequences, have focused the research on the
understanding of motion analysis and representation.
A fundamental problem in processing sequences is
the computation of motion. Optical flow is a
convenient and useful way for image motion
representation and 3D interpretation. It often plays a
key role in varieties of motion estimation techniques
and has been used in many computer vision
applications. Optical flow may be used to perform
motion detection, autonomous navigation, scene
segmentation, surveillance system (motion can be an
important source for a surveillance system when
objects of interest can be detected and tracked using
the optical flow vector to define the future
trajectories), motion compensation for encoding
sequences and stereo disparity measurement (Barron
1994), (Beauchemin, 1995) and (Weickert, 2001).
Thus an optical flow algorithm is specified by three
elements (Barron, 1994):
* The spatiotemporal operators that are applied
to the image sequence to extract features and
improve the signal to noise ratio,
* How optical flow estimates are produced from
a gradient search of the extracted feature space, and
the form of regularization applied to the flow field
considering confidence measures if they exist.
Optical flow estimation and computation methods
can be classified into three main categorie:
differential approaches, block-matching approaches
and frequential approaches (Baron, 1994).
Despite more than two decades of research, the
proposed methods for optical flow estimation are
relatively inaccurate and non-robust. Many methods
for the estimation of optical flow have been
proposed (Horn and Shunck (Horn, 1981); Lucas
and Kanade (Lucas, 1981); Markandy and
Flinchbaugh (Markandy, 1990); Fleet and Jepson
(Baron, 1994) and (Beauchemin, 1995); Weber and
Malik (Weber, 1995); Polina and Golland (Polina,
1995); Tsai et al. (Tsai, 1999); Ming et al.
(Ming,2002); Zhang and Lu (Zhang, 2000); Bruno
and Pellerin (Bruno, 2003); Barron and Klette
(Barron, 2002), Arredondo and al. (
Arredondo ,
2004), Joachim Weickert and al. (Joachim, 2003),
(Thomax, 2004) and (André, 2005) and Volker
Willert and al (Volker, 2005) ) .
We present in this paper a differential approach
using colour components as constraints functions for
the optical flow computation. The rest of this paper
is organized as follows: section 2 describes the main
optical flow constraint equation. In section 3 we
describe how to use colour in the process of optical
531
Bouden T. and Doghmane N. (2007).
DIFFERENNTIAL TECHNIQUE FOR MOTION COMPUTATION USING COLOUR INFORMATION.
In Proceedings of the Second International Conference on Computer Vision Theory and Applications - IU/MTSV, pages 531-537
Copyright
c
SciTePress

flow estimation. In section 4, we present the method
for the minimization of the function including the
smoothing term based on colour information. Some
experimental results are presented in section 5 and at
the end, we address a conclusion.
2 OPTICAL FLOW CONSTRAINT
EQUATION
Optical flow is the apparent motion of brightness
patterns in the images sequence. It corresponds to
the motion field, but not always.
Optical flow techniques are based on the idea
that for most points in the image, neighbouring
points have approximately the same brightness.
Optical flow can be computed from a sequence by
using the (Horn, 1981) assumption, known as the
brightness constancy assumption, is represented by
the following equation:
Where:
I
x
, I
y
and I
t
are first partial derivatives of I
respectively with respect to x, y and t and u and v
are the optical flow components in the x and y
directions.
Equation (1) is called optical flow constraint
equation. It provides only the normal velocity
component. So we are only able to measure the
component of optical flow that is in the direction of
the intensity gradient (aperture problem) and the
system is undetermined. To overcome this problem,
it is necessary to add additional constraints.
Another problem is that are assuming that δt is very
small. The sampling error in the spatial domain also
leads to errors in the computation of the I
x
and I
y
.
3 USE COLOUR INFORMATION
AS CONSTRAINT
The brightness assumption implies that the (R, G, B)
components of each image remain unchanged during
the motion undergone within a small temporal
neighbourhood (Weber, 1995). Therefore, R, G and
B images can be used in a similar way as the
luminance function: they have to satisfy the optical
flow constraint equation. Markandey and
Flinchbaugh (Markandy, 1990) have proposed a
multispectral approach for optical flow computation.
Their two-sensors proposal is based on solving a
system of two linear equations having both optical
flow components as unknowns. The equations are
deduced from the standard optical flow constraint
(1). In their experiments, they use colour TV camera
data and a combination of infrared and visible
images. Finally, they use two channels to resolve the
ill-posed problem (Barron, 2002).
Golland and Bruckstein (Polina, 1995) follow
the same algebraic method. They compare a
straightforward 3-channels approach using RGB
data with two 2-channel methods, the first based on
normalized RGB values and the second based on a
special hue-saturation definition.
The standard optical flow constraint may be
applied to each one of the RGB quantities, providing
an over determined system of linear equations
(Barron, 2002):
Then the pseudo-inverse computation gives the
following solution for the system:
Where:
This assumes that the matrix (A
T
A) is non-singular.
By definition this matrix is singular if its
columns or lines are linearly dependent, which
means that the first order spatial derivatives of the
colour components (R, G, B) are dependent. Since
the sensitivity functions Dr(λ), Dg(λ) and Db(λ) of
the light detectors are linearly independent, the first
derivatives of the R, G, B functions will also be
independent for images sequence with colour
changing in two different directions. But if the
colour is a uniform distribution, the (R, G, B)
functions are linearly dependent or if the colours of
the considered region change in one direction only,
the gradient vectors of (R, G, B) are parallel so that
the spatial derivatives are dependent and the matrix
(A
T
A) is singular. In addition to the estimates of the
image flow components at a certain pixel of the
image, we would like to get some measure of
confidence in the result at this pixel, which would
tell us to what extent we could trust our estimates. It
is common to use the so-called condition number of
the coefficient matrix of a system (A
T
A) as a
measure of confidence of this system (Polina, 1995).
To improve this problem, the idea is the use of two
independent functions for colour characterization so
that their gradient directions are not parallel. If the
0
xyt
Iu Iv I++=
(1)
0
0
0
xyt
xyt
xyt
Ru Rv R
Gu Gv G
Bu Bv B
⎧
+
+=
⎪
+
+=
⎨
⎪
+
+=
⎩
(2)
1
(.)..
TT
VAAAb
−
=
(3)
,
xy t
xy t
xy t
RR R
u
A G G b G and V
v
BB B
⎡⎤
−
⎡⎤
⎡⎤
⎢⎥
⎢⎥
==−=
⎢⎥
⎢⎥
⎢⎥
⎣⎦
⎢⎥
⎢⎥
−
⎣⎦
⎣⎦
(4)
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
532
quantities used here are denoted f and ff. The colour
conservation assumption implies:
Here the solution is given by simple matrix
inversion:
The ideal case is obtained when the gradient
directions of the two chosen functions are normal.
One possible solution is the use of two different
colour systems: the normalized RGB system,
denoted rgb system and the HSV system (Barron,
2002), (Markandy, 1990) and (Polina, 1995).
It is clear that any pair of (r, g, b) forms a system of
two independent functions. If we are taking the r and
g components, the optical flow computation system
to be solved is given by equation (6), where:
Now we consider the HSV systems. H and S
describe a vector in polar form, representing the
angular and magnitude components respectively
(Robert, 2003).
The HSV space is computed in the following way:
The solution is given by equation (6), where:
4 PROPOSED METHOD
It was shown that a colour sequence could be
straightforwardly considered as a set of three
different sequences produced by three types of light
sensors with different sensitivity functions in
response to the same input sequence (Markandy,
1990) and (Polina, 1995). So we propose to use the
same formulation as those proposed by Horn and
Schunck for the luminance function and to apply it
to the three colour components.
In the first stage we have to minimize a function
error containing the three colour components for the
considered colour space, each component satisfying
the optical flow constraint equation without any
smoothness term, for the RGB space we have:
The problem will be posed as finding (u, v) optical
flow components minimising F. The solution was
given by using equation (6); Where:
The matrix A must be non-singular. The smallest
eigenvalue of A
T
A or the condition number of A
T
A
can be used to measure numerical stability, i.e. if the
smallest eigenvalue is below a threshold or the
condition number is above a threshold, then we set
the optical flow vector to be undefined at this image
location.
So, in the second stage we add a local (on a small
region around each pixel) smoothness term on the
magnitude of optical flow vector with a weight α.
The motion of any object between two successive
times (t
0
and t
0
+∂t where ∂tÆ0) is supposed to be
very small and it can be used as a small
displacement in any direction. So equation (9) with
the smoothness term will be:
(
)
(
)
()
,
xyt xyt
2
2
xyt
22
22
Min
F R .u R .v R ² G .u G .v G ²
1
B.u B.v B ²+
2
uv
Rs
GB
V
α
εε
εε
⎧
= +++ ++
⎪
⎪
+++
⎨
⎪
⎪
=+++
⎩
(12)
Deriving F over u and v and solving the result
system. The same solution is found when adding the
smoothness term in the function F to minimize.
Deriving This solution is obtained by equation (6),
where :
We do not use iterative method to compute the
optical flow components here and the proposed
0
0
xyt
xyt
fu fv f
ff u ff v ff
++=
⎧
⎪
⎨
++=
⎪
⎩
(5)
1
.VAb
−
=
(6)
,
rr
r
u
xy
t
A b and V
g
gg v
xy
t
−
== =
−
⎡⎤
⎡⎤
⎡⎤
⎢⎥
⎢⎥
⎢⎥
⎣⎦
⎣⎦
⎣⎦
(7)
(,,) (,,)
,
(,,)
(,,),
(,,) (,,)
2(,,),
(,,) (,,)
4(,,)
(,,) (,,)
(, , ),
Max R G B Min R G B
Max R G B
GB
I
fRMaxRGB
Max R G B Min R G B
BR
H
If G Max R G B
Max R G B Min R G B
RG
I
fBMaxRGB
Max R G B Min R G B
VMaxRGB
S
−
⎧
−
=
⎪
−
⎪
⎪
⎪
−
=+ =
⎨
−
⎪
⎪
−
+=
⎪
−
⎪
⎩
=
=
(8)
,
H
and
S
H
H
u
xy
t
AbV
SSv
xy
t
−
===
−
⎡⎤
⎡⎤
⎡⎤
⎢⎥
⎢⎥
⎢⎥
⎣⎦
⎣⎦
⎣⎦
(9)
(
)
(
)
()
,
xyt xyt
xyt
22
2
Mi n
FR.uR.vR²G.uG.vG²
B.u B.v B ²
uv
R
GB
ε
εε
⎧
= +++ ++
⎪
⎪
+++
⎨
⎪
=++
⎪
⎩
(10)
222
;
222
.
RGBRRGGBB
x
x x xy xy xy
A
RR GG BB R G B
x
yxyxyyyy
RR GG BB
xxx
ttt
b
RR GG BB
yyy
ttt
++ + +
=
++ ++
++
=−
++
⎡
⎤
⎢
⎥
⎢
⎥
⎣
⎦
⎡⎤
⎢⎥
⎣⎦
(11)
2222
;
2222
.
RGB RRGGBB
x
x x xy xy xy
A
RR GG BB R G B
xy xy xy y y y
RR GG BB
xxx
ttt
b
RR GG BB
yyy
ttt
α
α
+++ + +
=
++ +++
++
=−
++
⎡
⎤
⎢
⎥
⎢
⎥
⎣
⎦
⎡⎤
⎢⎥
⎣⎦
(13
)
DIFFERENNTIAL TECHNIQUE FOR MOTION COMPUTATION USING COLOUR INFORMATION
533
method is only based on the function optimisation
and matrix inversion.
5 EXPERIMENTAL RESULTS
This section examines the quantitative performances
and the implementation of the proposed method.
5.1 Error Measurement
In order to quantify the accuracy of the estimated
range flow, the following errors measures are used.
Let the correct range flow be denoted as Vc and the
estimated flow as Ve. The relative error in the
velocity magnitude (
Barron et al., 2004), (Baron and
Klette, 2002), (
Volker et al., 2005):
[%]100.
c
ec
V
VV
Er
−
=
(14)
We use the directional error as a second error
measure:
[]
.
arccos
.
VcVe
Ed
Vc Ve
⎛⎞
=°
⎜⎟
⎜⎟
⎝⎠
(15)
This quantity gives the angle in 3D between
the correct velocity vector and the estimated vector
and thus describes how accurately the correct
direction has been recovered. We address this table,
to prove the efficiency of optical flow method for
studied sequences and for a precise confidence
measure (Barron, 2002), (
Arredondo, 2004),
(Joachim, 2003), (Thomax, 2004), (André, 2005)
and (Volker, 2005).
5.2 Implementations and Results
In the implementation of all studied methods, the
images of R, G and B, (r and g) and (H and S) are
obtained from the brightness function of images
sequence (R, G, B).
The first order derivatives of the sequence
functions are computed by using the (1/12) (-1, 8, 0,
-8, 1) kernel. We used a 5x5 neighbourhood, where
each line was a copy of the estimation kernel
mentioned above. For the computation of temporal
derivatives, a 3x3x2 spatiotemporal neighbourhood
was used.
In our case, we first computed the time taken by
any studied method addressed in Table 2, using
Matlab implementation on Toshiba PC Intel®
pentium®, Microprocessor 1.70GHz and 1Go of
RAM. We used the ball sequence with different
sizes and Barron and Klette synthetic panning
sequence in 2002.
The first synthetic sequence (figure 2), derived from
the original sequence (figure 1), contains ball
moving in the horizontal direction with 4
pixels/frame and in the vertical direction with 3
pixels/frames, with variable sizes. The second one is
generated by Barron and Klette (figure 7) where the
correct flow is known (Baron and Klette, 2002),
(
Volker et al., 2005).
Table 1: Time taken for computation by s CPU time.
In the second stage, we used the first synthetic
colour ball sequence with 64x64 size (figure 2) to
compare quantitatively the obtained results by each
studied method (figures 5 to 8). The results are
reported in table 2.
Table 2: Results Errors Comparison using synthetic colour
ball sequence with 64x64 size.
Proposed Method
AME :
Er±Std(Er)
AAE :
Ed±Std(Ed)
Using rgb space RGB 5.50%±2.44% 3.15°±1.39°
Using HSV space RGB 22.2%±25.45% 11.6°±12.14
Min. RGB space RGB 10.4%±11.41% 5.83°±6.13°
Min.(smooth.: α) RGB 6.16%±4.11% 3.52°±2.33°
In the last stage, we used the synthetic panning
sequence (figure 7) to compare quantitatively the
obtained results (figures 8 to 15). In table 4, we
added from the fourth line our results to the results
presented in (Baron and Klette, 2002), (
Volker et al.,
2005).
Table 3: Comparison between the results (Figures: 10 to
16) using synthetic panning sequence.
Method
AME :
Er±Std(Er)
AAE :
Ed±Std(Ed)
Horn-Schunck RGB 17.44%±17.77% 2.64°±4.08°
Goland-Bruckstein RGB 11.38%±17.36% 5.04°±11.80°
Baron-Klette RGB 16.14%±17.57% 0.16°
Using rgb space RGB 3.04%±0.72% 1.74°±0.40°
Using HSV space RGB 9.66%±19.14% 5.04°±8.63°
Min. RGB space RGB 6.06%±6.96% 3.43°±3.79°
Min. RGB space RGB
with smoothing term
3.52%±2.04% 2.01°±1.16°
Method 64x64 128x128 240X320 Panning
Using rgb 2.125 7.079 103.704 56.422
Using HSV 2.047 8.266 114.797 73.031
Using Min RGB 2.984 10.219 144.953 78.578
Using Smooth. α 3.062 10.625 146.719 83.781
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
534
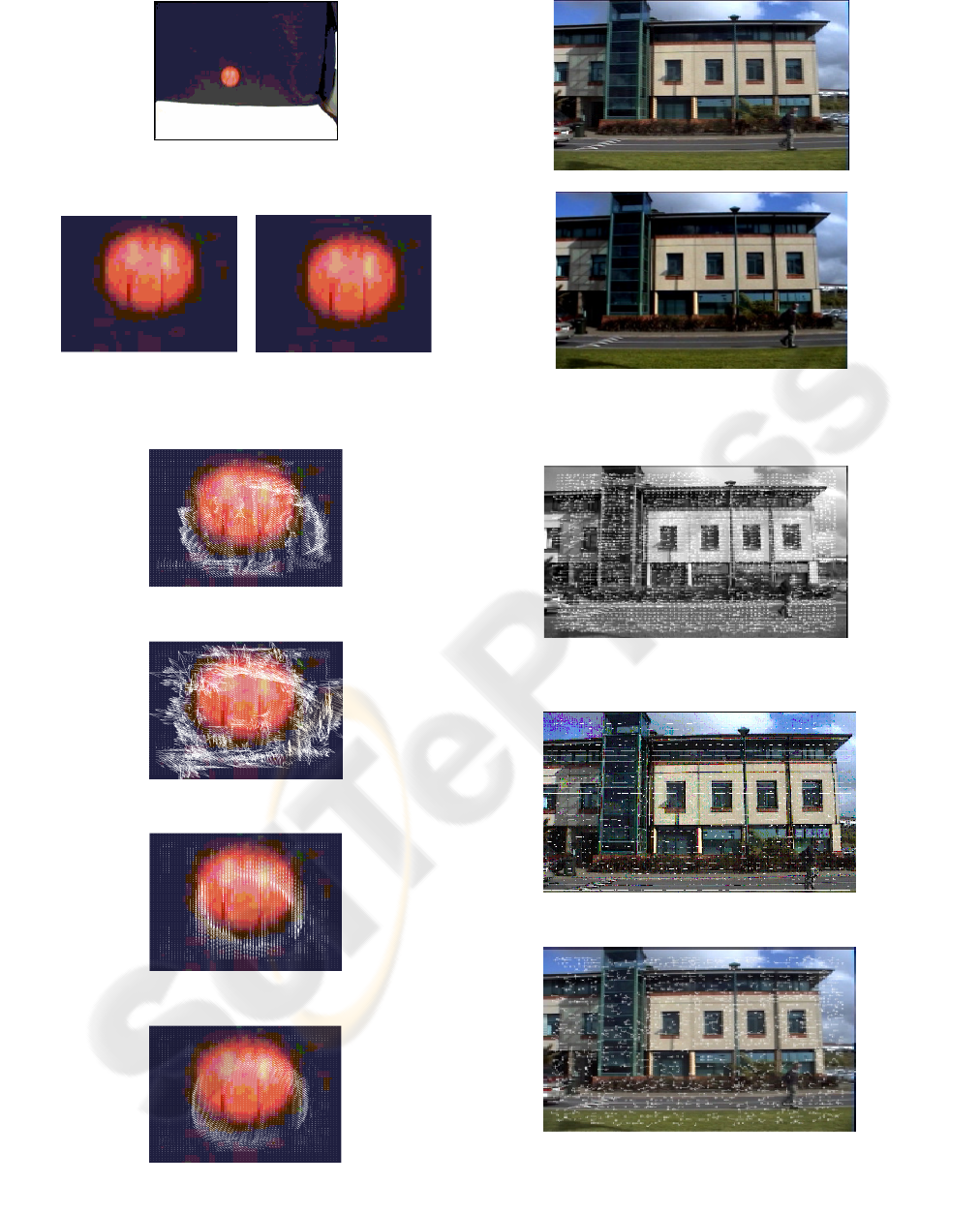
Figure 1: Original Image, of colour ball sequence with
240X320 size.
(a) (b)
Figure 2: (a) First image (b) Second image, of synthetic
colour ball sequence size 64X64.
Figure 3: Proposed method using rgb space.
Figure 4: Proposed method using HSV space.
Figure 5: Proposed method using RGB space.
Figure 6: Proposed method using RGB space with
smoothing term equal 3.
(a)
(b)
Figure 7: Images of Panning colour sequence (Real colour
sequence).
Figure 8: Horn-SchuncK flow for the Y component
(Y=0.299R+0.587G+0.114B) with α=3 and 100 iterations.
Figure 9: Golland-Bruckstein flow (RGB).
Figure 10: Baron-Klett flow (RGB).
DIFFERENNTIAL TECHNIQUE FOR MOTION COMPUTATION USING COLOUR INFORMATION
535

Figure 11: Proposed method using rgb space.
Figure 12: Proposed method using HSV space.
Figure 13: Proposed method using RGB space without
smoothing term.
Figure 14: Proposed method using RGB space with
smoothing term (α=100).
Figure 15: Proposed method using RGB space with
smoothing term (α=3).
6 CONCLUSION
When we propose a new method, its drawbacks
should also be discussed and compared with the
other methods in the same environment. It has
proved encouraging results.
Colour optical flow computed via the three
colour components seems better than grey value
optical flow. The proposed method using normalized
rgb colour space gives good results followed by that
using RGB space with smoothing term after that we
found the proposed method using RGB space
without smoothing term and finally that using the
HSV space. In our case we used a 100% density of
dense optical flow computation.
This proposed method requires the presence of
significant gradients of the functions it is based on.
If the gradient magnitude of these functions is small
enough (≈0), any gradient based method would fail
to give reliable results. This implies that all these
methods should not be used when a scene contains
objects with uniform colour.
The proposed method used the least squares
techniques to minimize the combination of optical
flow colour constraint equation using the matrix
inversion to compute the dense flow optic. We have
used the brightness constancy assumption, the colour
information as constraint function and the same
smoothness function as that proposed by Horn and
Shunck.
We can extend the proposed smoothness function
with other forms (as the combination of the local and
global constraints) and we can use a bidirectional
multigrid method for variational optical flow
computation to resolve the real-time computation
problem and the solving of the linear system of
equations that results from the discretisation of the
Euler-Lagrange equations.
We plan to investigate all these to find a robust
and sufficiently method for optical flow computation
for any given sequences in some specific
applications.
REFERENCES
Arredondo M. A., Lebart K. and Lane D., 2004. Optical
flow using texture. In Pattern Recognition letters in
Elsevier computer science, Letters25.
Barron J. L., Fleet D. J., Beauchemin S. S. and Burkitt T.
A., 1994. Performance of optical flow techniques. In
IJCV 12 (1).
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
536

Barron J. L. and Klette R., 2002. Quantitative colour
optical flow. In Proc. Int. Conf. on Pattern
Recognition.
Beauchemin S. S. and Barron J. L., 1995. The
Computation of Optical Flow. In ACM Computing
Survey, 27(3).
Bruno E. and Pellerin, D., 2000. Robust motion estimation
using spatial gabor filters. In X European Conf. Signal
Process.
Horn B. K. P. and Schunck, B. G., 1981. Determining
optical flow. In A.I.17.
Lucas B. D. and Kanade T., 1981. An iterative image
registration technique with an application to stereo
vision. In 7th Int. Joint Conf. on Artificial Intelligence.
Markandy V. and Flinchbaugh B. E., 1990. Multispectral
constraints for optical flow computation. In Proc. 3rd
ICCV, Osaka, Japan.
Ming, Y., Haralick, R. M. and Shapiro, L. G., 2002.
Estimating optical flow using a global matching
formulation and graduated optimization. In Proc. Int.
Conf. on Image Process.
Polina Golland, 1995. Use of colour for optical flow
estimation. In master of science in computer science,
Israel institute of Technologies, Iyar 5755 Haifa.
Tsai C. J., Galatsanos N. P. and Katsaggelos A. K., 1999.
Optical flow estimation from noisy data using
differential techniques. In Proc. IEEE Int. Conf. on
Acoustics, Speech, and Signal Process., vol. 6.
Weickert J. and Schnörr C., 2001. Variational optic flow
computation with a spatio-temporal smoothness
constraint. In Journal of Mathematical Imaging and
Vision.
Weber J., Malik J., 1995. Robust computation of optical-
flow in a multiscale differential framework. In IJCV
14 (1).
Zhang D. and Lu G., 2000. An edge and colour oriented
optical flow estimation using block matching. In:
Proc.5th Int. Conf. on Signal Process.
Robert J. A and Brian C. Lovell, 2003. Color Optical
Flow. In Lovell, Brian C. and Maeder, Anthony J, Eds.
Proceedings Workshop on Digital Image Computing,
pages 135-139, Brisbane.
Joachim W., André B and Christoph S., 2003.
Lukas/Kanade Meets Horn/Schunck: Combining
Local and Global Optic Flow Methods. PrePrint N°82.
In Fachrichtung 6.1- Mathematik Universität des
Saarlandes.
Thomax B., André B., Nils P. and Joachim W., 2004. High
Accuracy Optical Flow Estimation Based on a theory
for warping. In Proc., 8
th
European Conf. on
Computer Vision, Springer LNCS 3024, T. Pajdla and
J. Matas (Eds.), vol.4, PP:25-36, Prague, Czech
Republic.
André B., Joachim W., Christian F., Timo K. and
Christoph S., 2005. Variational optical flow
computation in real time. In IEEE Transactions on
Image Processing. Volume 14, Num.1.
Volker W., Julian E., Sebastian C. and Edgar K.; 2005.
Probabilistic colour optical flow. In W. Kropatsch, R.
Sablatnig, and Hanbury (Eds): DAGM 2005, LNCS
3663; PP:9-16; Springer-Verlag Berlin Heidelberg.
DIFFERENNTIAL TECHNIQUE FOR MOTION COMPUTATION USING COLOUR INFORMATION
537
