AUTOMATIC LIP LOCALIZATION AND FEATURE
EXTRACTION FOR LIP-READING
Salah Werda, Walid Mahdi and Abdelmajid Ben Hamadou
MIRACL: Multimedia Information systems and Advanced Computing Laboratory
Higher Institute of Computer Science and Multimedia, Sfax, Tunisia
Keywords: Visual information, Lip-reading system, Human-Machine interaction, Spatial-temporal tracking.
Abstract: In recent year, lip-reading systems have received a great attention, since it plays an important role in human
communication with computer especially for hearing impaired or elderly people. The need for an automatic
lip-reading system is ever increasing. Today, extraction and reliable analysis of facial movements make up
an important part in many multimedia systems such as videoconference, low communication systems, lip-
reading systems. We can imagine, for example, a dependent person ordering a machine with an easy lip
movement or by a simple syllable pronunciation. We present in this paper a new approach for lip
localization and feature extraction in a speaker’s face. The extracted visual information is then classified in
order to recognize the uttered viseme (visual phoneme). To check our system performance we have
developed our Automatic Lip Feature Extraction prototype (ALiFE). Experiments revealed that our system
recognizes 70.95 % of French digits uttered under natural conditions.
1 INTRODUCTION
Today, extraction and reliable analysis of facial
movements make up an important part in many
multimedia systems such as videoconference, low
communication systems and even for biometric
system especially in noisy environments. In this
context, many works in the literature, from the
oldest (Petajan et al., 1988) and (McGurck and
Mcdonald, 1976) until the most recent ones
(Daubias, 2002) and (Goecke, 2004) have proved
that movements of the mouth can be used as one of
the speech recognition channels. Recognizing the
content of speech based on observing the speaker’s
lip movements is called ‘lip-reading’. It requires
converting the mouth movements to a reliable
mathematical index for possible visual recognition.
It is around this thematic that our ALiFE
(Automatic Lip Feature Extraction) prototype
appears. ALiFE allows visual speech recognition
from a video locution sequence. More precisely, it
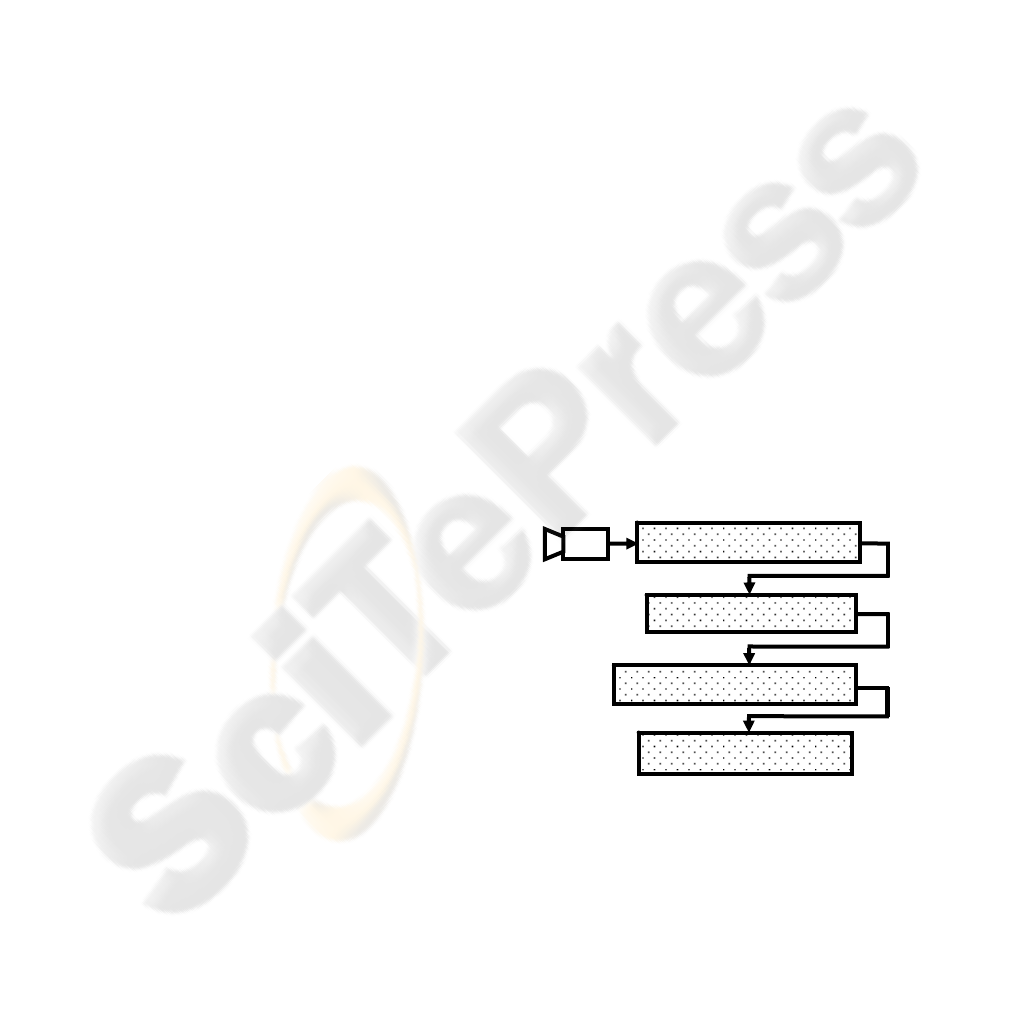
implements our approach which is composed of four
steps: At first, it proceeds by localizing lips and
some Point Of Interest (POI). The second step
consists on tracking these POI throughout the speech
sequence. Extraction of precise and pertinent visual
features from the speaker’s lip region will be then
achieved in the third step. At the end, the extracted
features are used for visemes (visual phoneme)
classification and recognition. Our ALiFE approach
presented in this paper covers the totality of the
visual speech recognition steps shown in figure1.
Figure 1: Overview of the complete ALiFE System for
visual speech recognition.
In section (2) we present an overview on labial
segmentation methods proposed in the literature.
Section (3) details out our lip localization and lip
tracking methods. In section (4), we present the
different features which will be used for the
recognition. In section (5), we evaluate our ALiFE
prototype for the visual recognition of French digits.
Lip and POI Localization
Visual-features Extraction
Speech unit recognition
POI Trackin
g
Camera
268
Werda S., Mahdi W. and Ben Hamadou A. (2007).
AUTOMATIC LIP LOCALIZATION AND FEATURE EXTRACTION FOR LIP-READING.
In Proceedings of the Second International Conference on Computer Vision Theory and Applications - IU/MTSV, pages 268-275
Copyright
c
SciTePress

Rates of visual digit recognition as well as a matrix
of
confusion between these digits will be shown.
2 LABIAL SEGMENTATION
METHODS: AN OVERVIEW
Several research works stressed their objectives in
the research on automatic and semi-automatic
methods for the extraction of visual indices,
necessary to recognize visual speech (Petajan et al.,
1988), (Meier et al., 1999) and (Potamianos et al.,
1998). Two types of approaches have been used for
lip-reading:
- The low-level approach (Matthews et al., 1996)
and (Meier et al., 1999), use directly the image of
the mouth region. This approach supposes that the
lip pixels have a different colour feature compared
to the ones of skin pixels. Theoretically, the
segmentation can therefore be done while
identifying and separating the lips and skin classes.
In practice, methods of this type allow rapid
locations of the interest zones and make some very
simple measures of it (width and height of the lips,
for example). However, they do not permit to carry
out a precise detection of the lip edges.
- The high level approach (Prasad et al., 1993),
(Rao and Mersereau, 1995), (Delmas, 2000) and
(Daubias, 2002), which is directed by physical
distance extraction, uses a model. For example, we
can mention the active contour, which were widely
used in lip segmentation. These approaches also
exploit the pixel information of the image, but they
integrate regularity constraints. The big
deformability of these techniques allows them to be
easily adapted to a variety of forms. This property is
very interesting when it is a matter of segmenting
objects whose form cannot be predicted in advance
(sanguine vessels, clouds...), but it appears more as a
handicap when the object structure is already known
(mouth, face, hand...). According to speech
specialists (Daubias, 2002), the pertinent features of
verbal communication expression are: the heights,
widths and inter-labial surface. From this
interpretation we notice that it will be judicious to
opt for an extraction method of these features based
on the detection and the tracking of some “Points Of
Interest” (POI) sufficient to characterize labial
movements. Therefore, the problem of labial
segmentation is to detect some POI on the lips and
to track them throughout the speech sequence.
In the following sections, we will present a new
hybrid approach of lip feature extraction. Our
approach applies in the first stage the active contour
method to automatically localize the lip feature
points in the speaker’s face. In the second stage, we
propose a spatial-temporal tracking method of these
points. This POI tracking will carry out visual
information describing the lip movements among the
locution video sequence. Finally, this visual
information will be used to classify and recognize
the uttered viseme.
3 ALIFE: LIP POI
LOCALIZATION AND
TRACKING
In this phase, we start with the localization of the
external contours of the lips on the first image of the
video sequence. Then, we identify on these contours
a set of POI that will be followed throughout the
video locution sequence.
3.1 Lip and POI Localization
Our approach for lip POI localization is to proceed
first by detecting a lip contour and secondly by using
this contour to identify a set of POI. One of the most
efficient solutions to detect lip contour in the lip
region, is the active contour techniques, commonly
named “Snakes” (Eveno, 2003), and (Eveno et al.,
2004). This method meets a lot of successes thanks
to its capacity to mix the two classic stages of
detection of contours (extraction and chaining). On
the other hand, snake method imposes a prior
knowledge of the mouth position. This constraint
guarantees a good convergence of the final result of
the snake. In fact, we proceed in the first step of our
lip POI localization by detecting the mouth corners.
These corners will indicate the position of the
initialization of our snake.
3.1.1 Initialization Stage: Mouth Corners
Localization
Mouth is the part of the lips visible on the human
face. Various works have been made to extract facial
regions and facial organs using color information as
clues especially for the localization of mouth
knowing that color of lips is different to skin color.
Among the color systems used to localize the mouth
position we quote the HSV color system and the rg
chromaticity diagram (Miyawaki et al., 1989). These
color systems are widely used to separate the skin
and the mouth map color. Yasuyuki Nakata and
Moritoshi Ando in (Nakata et al., 2004) represent
the color distribution for each facial organ based on
the relationship between RGB values normalized for
AUTOMATIC LIP LOCALIZATION AND FEATURE EXTRACTION FOR LIP-READING
269

brightness values in order to address changes in
lighting. We have exploited this idea in our mouth
localization approach and we apply a morphological
operation to detect the position of the gravity centre
of the mouth. As mentioned above, our approaches
begin by representing the image in (R
n
G
n
B
n
) color
system, defined by the following equation (1):
.
Y
B
*255B ,
Y
G
*255G ,
Y
R
*255R
nnn
===
(1)
With Y the intensity value.
After reducing the lighting effect by this color
system conversion we apply a binary threshold
based on the R
n
value, knowing that the R
n
is the
most dominant component in lip region. The results
of binarization are showing in figure (2a).
After that, we apply on the image an oilify filter.
This filter works by replacing the pixel at (x,y) with
the value that occurs most often in its N x M region.
The aim objective consists in eliminating the false
positive skin pixels which have a dominant R
n
value.
Thus, we use in this phase a diamond-shaped
structuring element (SE) (Figure 2) the aims goal is
to maintain on the final result, only lip pixels. The
width and the height of the SE are set according to
the distance of the locator to the camera. In our
experiments, we have fixed these measures
respectively to 30 and 10 pixels.
Figure 2 : diamond-shaped structuring element (SE).
Finally, we calculate the gravity center of the lip
pixels, it represents the mouth center (Figure 3). We
remark on this first mouth localisation step that the
final result is very sensitive to the noise which can
be caused by the red component dominance in some
skin pixels other than lip pixels. Thus, the centre of
the mouth which has been detected is not rather
precise, so, it will be considered in this second step
of our mouth corner localization process as the
centre of the Mouth Region (MR) and not as the
centre of the mouth (Figure 3). Knowing that the
corners and the interior of mouth constitute the
darkest zone in MR, we use in this step the
saturation component from the original image in
order to localize the mouth corners. Precisely, we
process by the projection of the pixel saturation
values from the MR on the vertical axis. This
projection allows the detection of the darkest axis
D
K
A
x
in the mouth region (Figure 4).
(a) (b)
(c) (d)
Figure 3: First step mouth localization : (a) original image
after the conversion in R
n
G
n
B
n
system (b) after the
binarization step (c) Image after the oilify filter.
Figure 4: Second step mouth corners localization:
projection of the saturation values in the mouth region
(MR) and the localization of the Darkest Axis D
K
A
x
.
(a) (b)
(b)
(d) (c)
Figure 5: (a) Scanning different pixels behind the axis (b)
results of scanning step (c) projection of local maxima on
the horizontal axis and diction of the right and the left
corner (d) initialization of the snake.
In figure 5a we remark that the mouth corners are not on
the detected D
K
A
x
, it is very normal according to the
physiognomy of lips. So, we proceed by scanning different
pixels along the D
K
A
x
to localize local maxima saturation
values. Extremas of these detected local maxima pixels
will be defined as the left and the right corners of the
mouth. Figure 5 shows results of our corners localization
method. Finally, the detected corners will be the basis of
the snake initialization (Figure 5c).
D
K
A
x
SE:
w
h
Origin
D
K
A
x
MR
SE
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
270

3.1.2 POI Localization Based on the Active
Contour Method
The active contours (or snakes) are deformable
curves evolving in order to minimize functional
energy, which are associated to them (Delmas,
2000). They move within the image of an initial
position toward a final configuration that depends on
the influence of the various terms of energy.
The initialization of our snake is based on the
mouth corners detected in section (3.1.1). Figure 5d
shows the initialization of the active contour by an
ellipse. We consider that our snake is composed of
(n) Vi points with (i≤n), and that “s” is the parameter
of spatial evolution in the contours image, for
example the curvilinear abscissa.
• The internal Energy: E
int
is going to depend only
on the shape of the snake. It is a regularity
constraint curve. We calculate it according to
Equation 2.
(2)
Where a and b are respectively the weights of the first and
second derivative V '' and V'. We will adjust a and b to
find a flexible contour.
• A potential energy imposed by the image: E
ext
is
characterized by a strong gradient depicted by
Equation 3.
2
ext
)y,x(IE ∇−= (3)
• The constraint energy: E
cont
is often defined by the
user, according to the specificities of the problem.
One of the cores of our contribution is the
definition of E
cont
. For us, E
cont
aims at pushing the
evolution of the snake toward the gravity centre G
(x
g
,y
g
) of the active contour. It represents the
Euclidian distance between G and V
i
computed as
follows:
))y-(y)x-((x E
2
gs
2
gscont
+=
(4)
With (x
s
,y
s
) and (x
g
,y
g
) the respective Cartesian coordinates of
snake’s points (s) and gravity center of the snake (G).
The principal goal of this energy is to ensure the
evolution of the snake in the picture zones having
weak gradient values. Therefore the total energy of
the snake E
tot
can be computed as follows:
In our implementation our snake is composed of
two ellipse halves. So we define for the snake
progression two E
tot
, one for the upper and one for
the lower part of the snake. The main idea of this
constraint is to allow a more reasonable weights
affectation to different terms of energy.
For example, knowing that the upper lip has a
strong gradient value, and it isn’t the case for the
lower lip, the weight (λ
1
) of the E
cont
with the lower
part of the snake will be higher compared to that (λ
2
)
of the upper part of the snake. This constraint
guarantees a good convergence of the final snake,
especially in regions having weak gradient values.
After the definition of active contour energies, the
snake is going to evolve progressively in order to
minimize its total energy E
tot
. In order to maintain
the initial form of our snake we interpolate the snake
points to two ellipse halves, one for the upper lip and
one for the lower lip. The snake progression will be
stopped, when E
tot
reaches its minimal value (Figure
6).
Figure 6: Snake evolution according to the energy
minimisation principle (The snake progression will be
stopped when the E
tot
reaches the minimum value).
Once the external contours of the lips are extracted
we employ a horizontal and vertical projection of the
snake points, to detect different POI. Figure 7
illustrates this localization process.
Figure 7: Points of interest detection by the projection of
the final contour on horizontal and vertical axis (H and V).
3.2 Lip Tracking
The problem of POI tracking (in our context each
POI is defined by a block of size w*w pixels) is to
detect these POI on the successive images of the
video sequence. This problem is to look for the
block (j) on the image (i) which has the maximum of
similarity with the block (j) detected on the image (i-
1) knowing that i is the number of image in the
video sequence and j is the number of block which
defines the different POI. Several algorithms and
measurements of similarity were presented in the
literature to deal with the problem of pattern
H
V
|)(s)'V'|(b(s)* |(s)V'|(a(s)* E
int
+=
)
i
(V
con
t
E
)
i
(V
ext
E )
1 i
V
,
i
V ,
1-i
(V
int
E
n1i
)
to
t
(Ei
n1i
)
1i
V ,
i
V ,
1-i
(V
tot
E
∗
+∗
+
+
∗
∑
→=
=
∑
→=
=
+
λ
β
α
(5)
AUTOMATIC LIP LOCALIZATION AND FEATURE EXTRACTION FOR LIP-READING
271

tracking. However, we notice that there are some
difficulties to adapt these algorithms to our problems
for the reason that the movements of the lips are
very complex. Our approach of POI tracking is an
alternative of the Template Matching technique
exploiting the spatial-temporal indices of the video.
The originality of our technique of labial-movement
tracking lies in the case of being limited to a set of
POI. The details of our spatial-temporal voting
approach of POI tracking are presented in (Werda et
al., 2005).
4 ALIFE: LIP FEATURE
EXTRACTION AND
CLASSIFICATION
In this section we present the different visual
descriptors which we use for the characterization of
the labial movements.
4.1 Lip Features Extraction
In this section we describe our hybrid features. We
can classify these descriptors in two categories: the
low-level feature using directly the image of the
mouth region and high level feature which is
directed by physical distance extraction. The
extraction of these descriptors will be based on the
tracking of POI already presented in section 3.
4.1.2 High Level Features
In this section we detail the intelligibility of the
different high level features.
- Vertical Distance (Upper lip / lower lip: DV’):
The variation of the vertical distance from the upper
and lower lip gives a clear idea on the opening
degree of the mouth during the syllabic sequence.
This measure is very significant for the recognition
of the syllables containing the vowels which open
the mouth for example /ba/.
- Vertical Distance (Corner axis / lower lip: DV’’):
The variation of the second vertical distance
between the lower lip and the horizontal axis
(formed by the left and right corners of the lip), is a
very important parameter especially for the
recognition of labial-dental visemes. Precisely, one
of the labial-dental visemes characteristic is that the
lower lip is in contact with the incisive tooth (like
/fa/) so this feature (DV’’) perfectly describe the
position of the lower lip.
- Horizontal Distance (DH): The variation of the
Horizontal distance between the right and the left lip
corners describes the stretching intensity of the lips
during the locution sequence. This measure is very
significant for the recognition of the visemes
containing vowels which stretch the mouth for
example /bi/.
- Opening Degree (OD): In addition to the variation
of the vertical and horizontal distances that give a
clear idea on the opening level of the mouth during
the syllabic sequence we calculate the angle (γ). This
measure (γ) characterizes the Opening Degree (OD)
of the mouth according to the position of the lower
and the upper lip and the right or the left corners.
This variation is very high with vowels which open
the mouth (Figure 8).
Figure 8: Mouth Opening Degree parameters (OD).
The angle (γ) will be calculated according to the
following equation:
(6)
With a, b and c are the different distances between
two pixels P
1
(x
1
,y
1
) and P
2
(x
2
,y
2
). For example, the
distance a is computed as follows:
(7)
4.1.3 Low Level Features:
The extraction of the low level parameters makes it
possible to take into account many characteristics
such as the appearance of the tooth or a particular
mouth area.
- Dark Area (DA):
Speech is the result of vocal combinations which
have a symbolic value that constitutes a language.
The speech happens after a stop in the expiry. This is
a compression of the intra-thoracic air with closing
of the glottis, then opening of the glottis and
emission of the air, thus we hear the voice. The air
expelled by the lungs crosses the larynx where it is
put in vibration by successive opening/closing of the
vocal cords or, more probably, by the undulation of
the mucous membrane which covers them.
Precisely, according to the configuration that the
mouth organs can take, the air ejected by the lungs
until outside, will pass through these organs which
a
c
b
γ
ab
cba
2
arccos
222
−+
=
γ
()()
2
21
2
21
Y-YX-X +=a
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
272

n
yxI
S
n
i
ii
∑
=
×=
1
dark
),(
α
will produce the speech. So we had the idea to
develop this measure, named the dark area (DA).
The dark area thus will define the inter-labial surface
from which the air will be ejected towards the
outside of the mouth. We will see in our experiments
that this descriptor is very relevant and constitutes
discriminating criteria for the configuration of
several visemes like /bou/.
To extract the dark pixels which are inside the
mouth, we will try to find these pixels in the region
of interest (ROI) described by a polygonal form.
This region is formed by the four POI. The main
problem is to separate between the dark and non-
dark pixels. Here is a question of finding a method
which can operate at various conditions of elocution
sequence acquisition, different configurations and
colours of the vermilion (which is not regular for all
speakers). With this intention we propose an
extraction of dark areas method with an adaptive
threshold (S
dark
).
(8)
With n the number of pixel within the ROI.
α is a threshold fixed at 0.3 according to
experimental results' that we carried out on our
audio visual corpus. The application of this dark area
detection reveals that we have some false DA
detection (Figure 10b). Generally, knowing the
physiognomy of the head we think that it is very
natural that this problem occurs. Both the
physiognomy and the light condition will generate
an important shadow effect in some regions within
the ROI. This shadow will affect the efficiency of
our adaptive threshold (S
dark
), since the (S
dark
) is
calculated on the whole ROI. To resolve this
problem, we apply a spatial adaptive threshold
(SAT
dark
). Precisely, the idea consists to dividing the
ROI to a three sub-regions (Figure 9).
Figure 9: Division of the ROI in three sub-regions.
The detection of dark pixels is made in such a way
that we calculate for every sub-region an (SAT
dark
).
This improvement largely reduces the shadow effect
in the image. The result of our dark area detection
approach is shown in figure 10.
In fact, the number of dark pixels is not so
discriminating between the various configurations of
each visemes.
(a) (b) (c)
Figure 10: Result of the dark area detection with (SAT
dark
)
improvement. (a) Original image, (b) Dark area detection
with (S
dark
), (c) Dark area detection with (SAT
dark
).
The spatial position of these pixels inside the
ROI is more interesting and more relevant. To
develop this criterion (spatial position) we proceed
by a weighing of the dark pixels on their position
compared to the ROI midpoint. The values of the
dark area feature (V [DA]) will be calculated in the
following equation:
(9)
With Xc and Yc Cartesian coordinates of the ROI gravity
centre.
With such approach, we exploit the spatial
distribution of the dark pixels inside the ROI.
- Teeth Area (TA):
The descriptor “Teeth Area” characterizes the
visibility of tooth during the locution sequence. For
example, the inter-dental phonemes /T/ and /D/ can
be satisfactorily produced by either protruding the
tongue through the teeth, or placing the tongue
behind the teeth of the upper jaw.
Figure 11: Result of the teeth area detection with various
speakers under different lighting conditions.
However, teeth can be distinguished from other
parts of the face by their characteristic low
saturation. Saturation measures the white quantity in
a colour. Then, the more the saturation is low (near
()()
2
c
2
c
Y-YX-X[DA] V +=
AUTOMATIC LIP LOCALIZATION AND FEATURE EXTRACTION FOR LIP-READING
273

to 0) the more the colour is white or pastel. On the
other hand higher saturation values (near to 1)
indicate that the colour is pure. Therefore, Zhang in
(Zhang et al., 2002) detects teeth by forming a
bounding box around the inner mouth area and
testing pixels for white tooth color: S<S
0
, where S
0
is fixed to 0.35, and S is between 0 and 1. However,
the visibility of the teeth was detected by a color
search within the ROI. In our teeth area extraction
process, we exploit this idea to find pixels which
have low saturation values (Figure 11).
4.2 Lip Features Classification and
Recognition: Application in French
Digits
ALiFE prototype is evaluated with multiple speakers
under natural conditions. We have created a specific
audio-visual (AV) corpus constituted by the
different French digits. The capture is done with one
CCD camera; the resolution is 0.35 Mega of pixels
and with 25 frames/s (fps). This cadence is wide
enough to capture the major important lip
movement. Our recognition system ALiFE, like the
majority of recognition system, is composed by tow
sub-systems, one for training and one for
recognition. The training stage consists of building
the recognition models for each viseme in our
corpus. In the second stage, we classify the viseme
descriptors by the comparison with the models built
during the first stage. On the other hand, we note
that the syllable sequence duration is not necessarily
unvaried for all speakers. Moreover, we do not have
the same mouth size for all people. So, to construct a
robust recognition system we apply a spatial-
temporal normalization on the distance variation
curves. The detail of our own lip feature
classification method is presented in (Werda et al.,
2006) and (Werda et al., 2006).
5 EXPERIMENTAL RESULTS
In this section we present the experimentation results
for the evaluation of our ALiFE system for the
visual speech recognition. We perform our visual
speech recognition system using our own
audiovisual database. The database includes ten test
subjects (three females, seven males) speaking
isolated words repeated 10 times. In our experiment,
we use the data set for ten French digits.
We conducted tests for only speaker dependent
using the six visual parameters described in section
4. The rates of recognition of each viseme as well as
a matrix of confusion between these viseme will be
shown. The test was set up by using a leave-one-out
procedure, i.e., for each person, five repetitions were
used for training and five for testing. This was
repeated ten times for each speaker in our database.
The recognition rate was averaged over the ten tests
and again over all ten speakers.
Table 1: Recognition rate of French digits.
Input Recognition Rate
1 83.33%
2
83.33%
3
83.33%
4
66.67%
5
66.67%
6
66.67%
7 50.00%
8 83.33%
9 83.33%
0 42.86%
Recognition Rate 70.95%
Figure 12: Experimental results of digits confusion matrix.
It can also be seen from figure 12 that the latter
three words were mainly confused with another. The
poor recognition rate for digit ‘Zero’ (42.86%) is
due to the specific syllabic composition of the digit
‘Zero’. This digit is composed of two visemes /ε/
and /o/. So, it is important to take in to consideration
this constraint in future work.
6 CONCLUSION AND FUTURE
WORK
Many works in the literature, from the oldest
(Petajan et al., 1988) until the most recent ones
(Goecke, 2004), proved the efficiency of the visual
speech-recognition system, particularly in noisy
audio conditions. Our research tasks relate to the use
1
2
3
4
5
6
7
8
9
0
1
5
9
0%
20%
40%
60%
80%
100%
Input
Output
D igit C o nfusio n M atrix
1
2
3
4
5
6
7
8
9
0
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
274

of visual information for the automatic speech
recognition. The major difficulty of the lip-reading
system is the extraction of the visual speech
descriptors. In fact, to ensure this task it is necessary
to carry out an automatic tracking of the labial
gestures. The lip tracking constitutes in itself an
important difficulty. This complexity consists in the
capacity to treat the immense variability of the lip
movement for the same speaker and the various lip
configurations between different speakers.
In this paper, we have presented our ALiFE
system of visual speech recognition. ALiFE is a
system for the extraction of visual speech features
and their modeling for visual speech recognition.
The system includes three principle parts: lip
localization and tracking, lip feature extraction, and
the classification and recognition of the viseme. This
system has been tested with success on our audio-
visual corpus, for the tracking of characteristic
points on lip contours and for the recognition of the
viseme.
However, more work should be carried out to
improve the efficacy of our lip-reading system. As a
perspective of this work, we propose to add other
consistent features. We also propose to enhance the
recognition stage by the adequate definition of the
feature coefficients for each viseme (use of the
principal component analysis ACP). Finally, we plan
to enlarge the content of our audio-visual corpus to
cover other French language visemes and why not to
discover other languages.
REFERENCES
Petajan, E. D., Bischoff, B., Bodoff, D., and Brooke, N.
M., “An improved automatic lipreading system to
enhance speech recognition,” CHI 88, pp. 19-25,
1988.
Daubias P., Modèles a posteriori de la forme et de
l’apparence des lèvres pour la reconnaissance
automatique de la parole audiovisuelle. Thèse à
l’Université de Maine France 05-12-2002.
Goecke R., A Stereo Vision Lip Tracking Algorithm and
Subsequent Statistical Analyses of the Audio-Video
Correlation in Australian English. Thesis Research
School of Information Sciences and Engineering. The
Australian National University Canberra, Australia,
January 2004.
McGurck et Mcdonald J., Hearing lips and seeing voice.
Nature, 264 : 746-748, Decb 1976.
Matthews I., J. Andrew Bangham, and Stephen J. Cox.
Audiovisual speech recognition using multiscale
nonlinear image decomposition. Proc . 4th ICSLP,
volume1, page 38-41, Philadelphia, PA, USA, Octob
1996.
Meier U., Rainer Stiefelhagen, Jie Yang et Alex Waibe.
Towards unrestricted lip reading. Proc 2nd
International conference on multimodal Interfaces
(ICMI), Hong-kong, Jan 1999.
Prasad, K., Stork, D., and Wolff, G., “Preprocessing video
images for neural learning of lipreading,” Technical
Report CRC-TR-9326, Ricoh California Research
Center, September 1993.
Rao, R., and Mersereau, R., “On merging hidden Markov
models with deformable templates,” ICIP 95,
Washington D.C., 1995.
Delmas P., Extraction des contours des lèvres d’un visage
parlant par contours actif (Application à la
communication multimodale). Thèse à l’Institut
National de polytechnique de Grenoble, 12-04-2000.
Potamianos G., Hans Peter Graft et eric Gosatto. An
Image transform approach For HM based automatic
lipreading. Proc, ICIP, Volume III, pages 173-177,
Chicago, IL, USA Octb 1998.
Matthews I., J. Andrew Bangham, and Stephen J. Cox. A
comparaison of active shape models and scale
decomposition based features for visual speech
recognition. LNCS, 1407 514-528, 1998.
Eveno N., “Segmentation des lèvres par un modèle
déformable analytique”, Thèse de doctorat de l’INPG,
Grenoble, Novembre 2003.
Eveno N., A. Caplier, and P-Y Coulon, “Accurate and
Quasi-Automatic Lip Tracking”, IEEE Transaction on
circuits and video technology, Mai 2004.
Miyawaki T, Ishihashi I, Kishino F. Region separation in
color images using color information. Tech Rep IEICE
1989; IE89-50.
Nakata Y., Ando M. Lipreading Method Using Color
Extraction Method and Eigenspace Technique
Systems and Computers in Japan, Vol. 35, No. 3, 2004
Zhang X., Mersereau R., Clements M. and Broun C.,
Visual Speech feature extractionfor improved speech
recognition. In Proc. ICASSP, Volume II, pages 1993-
1996, Orlondo,FL, USA, May 13-17 2002.
Werda S., Mahdi W. and Benhamadou A., “A Spatial-
Temporal technique of Viseme Extraction:
Application in Speech Recognition “, SITIS 05, IEEE,
Werda S., Mahdi W., Tmar M. and Benhamadou A.,
“ALiFE: Automatic Lip Feature Extraction: A New
Approach for Speech Recognition Application “, the
2nd IEEE International Conference on Information &
Communication Technologies: from Theory to
Applications - ICTTA’06 - Damascus, Syria. 2006.
Werda S., Mahdi W. and Benhamadou A.,
“LipLocalization and Viseme Classification for Visual
Speech Recognition”, International Journal of
Computing & Information Sciences. Vol.4, No.1,
October 2006.
AUTOMATIC LIP LOCALIZATION AND FEATURE EXTRACTION FOR LIP-READING
275
