
PARTS-BASED FACE DETECTION AT MULTIPLE VIEWS
Andreas Savakis and David Higgs
Department of Computer Engineering, Rochester Institute of Technology, Rochester, NY 14623, USA
Keywords: Face detection, parts-based, multiple views, neural network, Bayesian network.
Abstract: This paper presents a parts-based approach to face detection, that is intuitive, easy to implement and can be
used in conjunction with other image understanding operations that use prominent facial features. Artificial
neural networks are trained as view-specific parts detectors for the eyes, mouth and nose. Once these salient
facial features are identified, results for each view are integrated through a Bayesian network in order to
reach the final decision. System performance is comparable to other state-of the art face detection methods
while providing support for different view angles and robustness to partial occlusions.
1 INTRODUCTION
Face detection in images and video is very important
for many applications including surveillance,
biometrics, content-based image retrieval and
human-computer interaction. Image and video
understanding systems often perform multiple tasks
in addition to face detection, such as pose
estimation, gaze detection, recognition of facial
expressions, etc. Therefore, it would be helpful to
develop face detection methods that utilize features
which can be shared with other modules.
Face detection approaches may be categorized as
feature-based or image-based (Hjelmas and Low,
2001). For example, neural networks and support
vector machines were used in (Rowley et al., 1998)
and (Osuna et al., 1997) without considering
features. In feature based approaches, primitive parts
can be utilized to match known object relationships,
as in (Yow and Cipolla, 1997) and (Hsu et al.,
2002). In (Yow and Cipolla, 1997), a Bayesian
network was used to detect faces given evidence on
the presence of features. Boosting of features was
employed in (Viola and Jones, 2001) and (Xiao et
al., 2003). The parts selection process can be
automated using statistical methods, as in
(Schneiderman and Kanade, 2004), (Weber et al.,
2000), and (Fergus et al., 2003).
Automatic parts selection works without the need
of expert knowledge to identify important features,
but it does not always result in intuitively obvious
regions. This makes it difficult to share detected
features with other image understanding tasks.
Detection at multiple views may be
accomplished as an extension of existing methods by
training a single detector with all available views
(Pontil and Verri, 1998), (Yang et al., 2000) or by
training one model per viewpoint (Schneiderman
and Kanade, 2000). A constellation model that is
suitable for multipose detection was employed in
(Weber et al. 2000), and (Fergus et al., 2003).
In this paper, we present a parts-based approach
to face detection which utilizes prominent features
that may be used by other image understanding
methods. Thus, the results of feature detection
modules can be shared between various tasks for
efficient operation of the overall system.
Furthermore, the parts-based approach allows
detection under partial occlusion and is extended to
incorporate multiple views.
2 FACE DETECTION SYSTEM
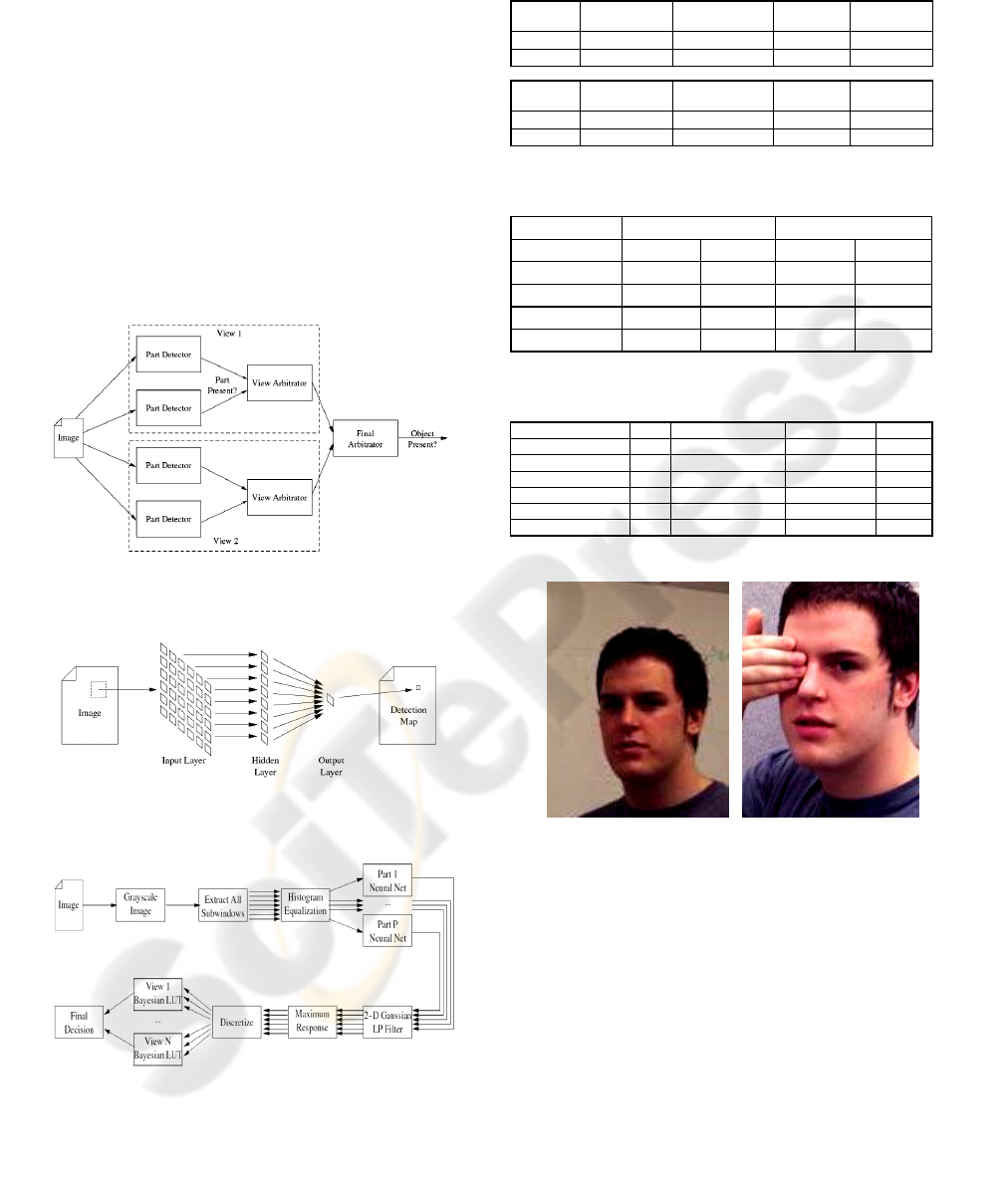
The basic framework for the parts-based face
detection system is shown in Figure 1. This system
contains separate modules, where each module is
designed to support a different object view.
Individual parts detectors are selected to correspond
to prominent facial features, namely eyes, mouth and
nose. Parts detectors for each view are separately
trained and their outputs are fed into a Bayesian
network arbitrator that determines whether a face is
present at a given view.
Multi-layer artificial neural networks (ANNs) are
used for parts detection. The input layer corresponds
298
Savakis A. and Higgs D. (2007).
PARTS-BASED FACE DETECTION AT MULTIPLE VIEWS.
In Proceedings of the Second International Conference on Computer Vision Theory and Applications - IU/MTSV, pages 298-301
Copyright
c
SciTePress

to a rectangular aperture at the selected reference
scale, as shown in Figure 2. The ANN detector is
applied as a sliding window, such that the network
response at each location is recorded in an activation
map. To accommodate moderate variations in scale,
three window sizes are scaled to the ANN
resolution.
The overall face detection system is shown in
Figure 3. Histogram equalization is performed on
each image subwindow to compensate for lighting
variations. The equalized region is processed by the
neural network parts detectors and an activation map
is obtained for each view. The activation map is
lowpass filtered to reduce the effects of outliers, and
the facial feature locations are identified based on
the maximum values of the activation map.
The results of the feature detector are interpreted
by the arbitrator network. Bayesian networks were
chosen as view arbitrators because of their natural
resistance to overfitting and ability to incorporate
incomplete data and cause-and-effect relationships
(Heckerman, 1995). This required discretizing the
output of the neural networks to indicate presence or
absence of a feature.
The final decision incorporates the detection
results at different poses and this is done with a
simple logical OR operation, since little additional
leverage can be gained by applying a more complex
decision-making process.
3 RESULTS
The FERET database (Phillips, 2000) was used to
construct training and testing sets, as it contains
multiple viewing angles of human faces. Other
desirable characteristics include a large number of
subjects and good diversity across age, race, and
gender. There were 1364 images of the Frontal A
view and 690 images of the Quarter Left view that
selected to illustrate the capabilities of the system,
henceforth referred to as “frontal” and “side” views.
The four facial features selected were the left
eye, right eye, nose, and mouth. Both the frontal and
side views allow for all four facial features to be
visible. The input images were scaled so that most
parts could be represented with 400 or less input
neurons. Eyes were detected based on a 12x20 pixel
aperture, with the exception of the right eye of the
side view; it was 12x16 pixels due to foreshortening
effects. The nose and mouth detectors were 18x20
and 14x32 pixel windows, respectively. The
resulting faces had approximate dimensions of 50
pixels high by 55 pixels wide.
The bootstrapping process was used for training
the parts detectors (Sung and Poggio 1998). The
component parts were extracted from the training
images, preprocessed, and added to the training set
as positive examples. To prevent an initial bias, an
equally sized negative set was added by taking
random preprocessed subwindows from a
background dataset consisting of 451 images from
the Caltech background image database.
Arbitration networks for each view were trained
in order to make a decision about the presence or
absence of a face in the scene. Part activation values
were gathered and used to determine event
thresholds for each part. The threshold was selected
by plotting a receiver operating characteristic curve
(ROC curve) for the activation values and choosing
the optimal threshold point.
The use of Bayesian networks allowed for the
inaccuracies of the individual neural networks to be
handled implicitly by the network itself. The
conditional probability tables (CPTs) were
determined experimentally from the training set.
Since the true presence of an object was known prior
to finding the part detections, statistics were
gathered for each part in the form of CPTs. Table 1
shows how the results of training the individual parts
detectors were incorporated in CPTs. The
correspondence between each part and its associated
view was found by counting the frequency of
detection with respect to whether the candidate
image contained a face or not. The experimental part
detection rates conformed to expectations, in that
parts are typically detected when a view was present
and not detected when the view is not present.
Bayes’ rule was applied to each view’s arbitration
network to find an expression relating the presence
of an object at a certain view to the conditional part
probabilities, as shown in the equation below:
where v represents a view and d’s represent parts
detected. For a given set of part detections, the
equation was evaluated twice – once for each state
of the view detection – substituting in the
corresponding CPTs for each part. The view state
with the larger network probability was the view
belief for the image. n most cases, two or more of
the four parts at any particular view indicated the
presence of the object.
The validation process was to simply run the
standard detection scheme on the validation images
of each cross-validation set. The testing results
illustrate the performance of the system on images
that it had never encountered. The output of the final
stage was a binary decision between face and non-
(
)
(
)
(
)( )( )
(
)
vdPvdPvdPvdPvPddddvP ||||,,,|
43214321
=
PARTS-BASED FACE DETECTION AT MULTIPLE VIEWS
299

face; the average performance is shown in Table 2.
The overall detection performance is better than the
performance of any of the individual part detectors,
which demonstrates the strength of Bayesian
decisions in this context. Side face detection
performed slightly better on average than the frontal
face detection, which could be expected by
comparing the part CPTs of each view.
For demonstration purposes, the proposed parts-
based face detection method was applied to subjects
outside the FERET database. Figure 4 shows two
correctly detected faces that are at different scales
and varying lighting conditions. Note that occlusion
of one eye did not affect the detection result.
4 CONCLUSIONS
This paper presents a parts-based face detection
approach that includes support for multiple viewing
angles. Parts detectors for eyes, mouth and nose
were implemented using neural networks trained
using the bootstrapping method. Bayesian networks
were used to integrate part detections in a flexible
manner, and were trained on a separate dataset so
that the experimental performance of each part
detector could be incorporated into the final
decision.
Images from the FERET human face database
were selected for training and testing. Individual part
detection rates ranged from 85% to 95% against
testing images (Table 1). Cross-validation was used
to test the system as a whole, giving average view
detection rates of 96.7% and 97.2% respectively for
the frontal and side views, and an overall face
detection rate of 96.9% (Table 2). A 5.7% false-
positive rate was demonstrated on background
clutter images.
Table 3 shows that the approach presented in this
paper performs in a manner comparable to other
research efforts within the field of face detection,
with minimal restrictions that would hinder
generalization to other object categories. In addition,
this approach provides the additional benefit of
support for different view angles. Finally, selecting
prominent facial features for face detection provides
a benefit for other image understanding modules that
may utilize the detected features.
ACKNOWLEDGEMENTS
This research was sponsored in part by the Eastman
Kodak Company and the Center for Electronic
Imaging Systems (CEIS), a NYSTAR-designated
Center for Advanced Technology in New York
State.
REFERENCES
Fergus R., Perona P., and Zisserman A., 2003. Object
Class Recognition by Unsupervised Scale-Invariant
Learning. In Proceedings of the IEEE Conference on
Computer Vision and Pattern Recognition.
Heckerman D., 1995. A Tutorial on Learning With
Bayesian Networks. Technical Report MSR-TR-95-
06, Microsoft Research, Advanced Technology
Division.
Hjelmas, E. and Low, B. K., 2001. Face Detection: A
Survey. In Computer Vision and Image
Understanding, vol. 83, pp. 236–274.
Hsu R. L., Abdel-Mottaleb M., and Jain A. K., 2002. Face
Detection in Color Images. IEEE Transactions on
Pattern Analysis and Machine Intelligence, vol. 24,
pp. 696–706..
Osuna E., Freund R., and Girosi F., 1997. Training
Support Vector Machines: an Application to Face
Detection. In Proceedings of the IEEE Conference on
Computer Vision and Pattern Recognition, pp. 130–
136.
Phillips P. J., Moon H., Rizvi S. A., and Rauss P. J., 2000.
The FERET Evaluation Methodology for Face-
Recognition Algorithms. IEEE Transactions on
Pattern Analysis and Machine Intelligence, vol. 22,
pp. 090–1104, October.
Pontil M. and Verri A., 1998. Support Vector Machines
for 3D Object Recognition. IEEE Transactions on
Pattern Analysis and Machine Intelligence, vol. 20,
pp. 637–646.
Rowley H. A., Baluja S., and Kanade T., 1998. Neural
Network-Based Face Detection. IEEE Transactions on
Pattern Analysis and Machine Intelligence, vol. 20,
pp. 23–38.
Schneiderman, H. and Kanade T., 2000. A Statistical
Method for 3D Object Detection Applied to Faces and
Cars. In Proceedings of the IEEE Conference on
Computer Vision and Pattern Recognition, vol. 1, pp.
1746–1759.
Schneiderman H. and Kanade T., 2004. Object Detection
Using the Statistics of Parts. International Journal of
Computer Vision, vol. 56, pp. 151–177.
Sung K. K. and Poggio T., 1998. Example-based Learning
for View-based Human Face Detection. IEEE
Transactions on Pattern Analysis and Machine
Intelligence, vol. 20, pp. 39–51.
Viola P. A. and Jones M. J., 2001. Rapid Object
Detection using a Boosted Cascade of Simple
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
300
Features. In Proceedings of the IEEE Conference on
Computer Vision and Pattern Recognition, vol. 1, pp.
511–518.
Weber M., Welling M., and Perona P., 2000.
Unsupervised Learning of Models for Recognition. In
Proceedings of the European Conference on
Computer Vision, vol. 1, pp. 18–32.
Xiao R., Zhu L., and Zhang H. J., 2003. Boosting Cascade
Learning for Object Detection. In IEEE International
Conference on Computer Vision, ICCV03.
Yang M. H., Roth D., and Ahuja N., 2000. Learning to
Recognize 3D Objects with SNoW. In Proceedings of
the European Conference on Computer Vision, vol. 1,
pp. 439–454.
Yow, K. C. and Cipolla R., 1997. Feature-based human
face detection. Image and Vision Computing, vol. 15,
pp. 713–735.
Figure 1: Framework for parts-based face detection at
multiple views.
Figure 2: Neural network parts detector.
Figure 3: Overall Flow of Face Detection System.
Table 1: Conditional Probability Tables (CPTs) based on
the performance of feature detectors.
0.86630.95190.86240.8964T
0.07900.04580.10790.0798F
P(Mouth = T)P(Nose = T)P(Right Eye = T)P(Left Eye = T)
Frontal
View State
0.86630.95190.86240.8964T
0.07900.04580.10790.0798F
P(Mouth = T)P(Nose = T)P(Right Eye = T)P(Left Eye = T)
Frontal
View State
0.84490.92270.85600.9111T
0.11450.06580.09240.0791F
P(Mouth = T)P(Nose = T)P(Right Eye = T)P(Left Eye = T)
Side View
State
0.84490.92270.85600.9111T
0.11450.06580.09240.0791F
P(Mouth = T)P(Nose = T)P(Right Eye = T)P(Left Eye = T)
Side View
State
Table 2: Face Detection Performance.
Detected PercentDetected Images
97.2%2.8%167.64.9Side
96.9%3.1%497.516Face Overall
5.7%94.3%6.4106.3Background
96.7%3.3%329.911.1Frontal
FaceNon-FaceFaceNon-FaceDataset
Detected PercentDetected Images
97.2%2.8%167.64.9Side
96.9%3.1%497.516Face Overall
5.7%94.3%6.4106.3Background
96.7%3.3%329.911.1Frontal
FaceNon-FaceFaceNon-FaceDataset
Table 3: Comparison with existing work.
92.9%BayesianEdge DetectionPartsYow & Cipolla (1997)
96.9%BayesianNeural NetworksPartsView Based Parts
96.4%Statistical ModelGaussian DistributionPartsFergus et al. (2003)
99.5%ThresholdNeural NetworksImageRowley et al. (1998)
97.1%ThresholdSVMImageOsuna et al. (1997)
96.7%Neural NetworkPCA Distance MetricImageSung & Poggio (1998)
DetectionArbitrator(s)Detector(s)Model
92.9%BayesianEdge DetectionPartsYow & Cipolla (1997)
96.9%BayesianNeural NetworksPartsView Based Parts
96.4%Statistical ModelGaussian DistributionPartsFergus et al. (2003)
99.5%ThresholdNeural NetworksImageRowley et al. (1998)
97.1%ThresholdSVMImageOsuna et al. (1997)
96.7%Neural NetworkPCA Distance MetricImageSung & Poggio (1998)
DetectionArbitrator(s)Detector(s)Model
(a) (b)
Figure 4: Examples of detected faces showing robustness
to scale variations, lighting variations and occlusion.
PARTS-BASED FACE DETECTION AT MULTIPLE VIEWS
301
