
PEDESTRIAN DETECTION BY RANGE IMAGING
Heinz Hügli and Thierry Zamofing
Institute of Microtechnology, University of Neuchâtel, Rue Breguet 2
CH-2000 Neuchâtel, Switzerland
Keywords: Change detection, 3D camera, range imaging, stereo, time-of-flight, pedestrian detection, shadow effects,
changing illumination.
Abstract: Remote detection by camera offers a versatile means for recording people activities. Relying principally on
changes in video images, the method tends to fail in presence of shadows and illumination changes. This
paper explores a possible remedy to these problems by using range cameras instead of conventional video
cameras. As range is an intrinsic measure of object geometry, it is basically not affected by illumination.
The study described in this paper considers range detection by two state-of-the art cameras, namely a stereo
and a time-of-flight camera. Performed investigations consider typical situations of pedestrian detection.
The presented results are analyzed and compared in performance with conventional results. The study
shows the effective potential of range camera to get rid of light change problems like shadow effects but
also presents some current limitations of range cameras.
1 INTRODUCTION
Pedestrian detection plays a central role in many
applications. An overview of different pedestrian
detection sensors such as passive infrared,
ultrasonic, microwave radar, video imaging and
piezometric is presented in reference (Beckwith and
Hunter-Zaworski, 1996), (Haritaoglu et al., 1998).
This paper concentrates on pedestrian detection by a
fixed camera. Various systems based on monocular
vision to detect and track pedestrians are extensively
described in reference
2
. Basically the detection
process tries to model the background and to detect
the presence of persons or objects from the
difference between the modeled background and the
current scene. A major difficulty of background
modeling with 2-D cameras arises in presence of
changing illumination and shadows. Therefore
shadow suppression algorithms have been designed
to deal with this problem (Finlayson et al., 2002),
(Jiang and Drew, 2003), (Jianguang et al., 2002).
Other interesting and robust background modeling
algorithms use kernel-density model (Elgammal et
al., 2002), hidden markov models, adaptive color
mixture models, weighted match filtering or a
Cauchy statistical model (Ming and Jiang, 2003).
As alternative to above efforts, this study
evaluates new detection systems based on range
image measurements, analyses their efficiency and
compares them with video systems operating in
difficult conditions. The usage of range (3D)
cameras instead of conventional video (2D) cameras
is expected to improve the robustness of detection
and to make the system insensitive to illumination
and shadow perturbations. Two range camera
systems are considered in this paper: stereo cameras
and time-of-flight cameras (Seitz, 2003).
Next section presents a change detection
procedure suited for range. Then, two range imaging
technologies are presented and compared: stereo and
time-of-flight (TOF) imaging. Finally, a section is
devoted to the application of these range cameras for
pedestrian detection.
2 PRESENCE DETECTION BY
VIDEO AND RANGE
Persons or objects are detected where changes with
respect to a background model occur.
18
Hügli H. and Zamofing T. (2007).
PEDESTRIAN DETECTION BY RANGE IMAGING.
In Proceedings of the Second International Conference on Computer Vision Theory and Applications, pages 18-22
DOI: 10.5220/0002069000180022
Copyright
c
SciTePress
2.1 Change Detection from Video
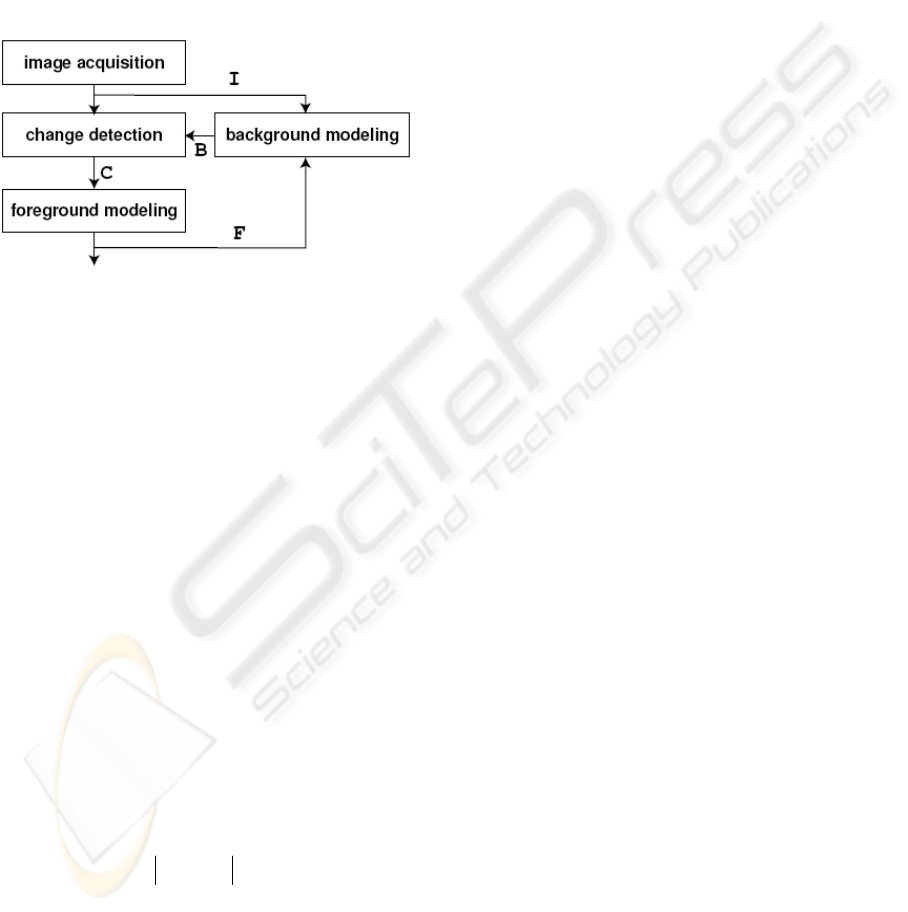
Figure 1 presents the basic processing scheme for
detecting the presence of persons or objects. Central
to it is change detection, which consists mainly is
detecting differences between the current image I
and the background B, which is a representation of
the static scene. Foreground modeling segments and
labels the change image based on a priori available
knowledge in order to provide a best estimate of the
objects or persons in presence.
Figure 1: Detecting persons from change.
Background modeling schemes are numerous. Let us
mention, in order of increasing complexity, fixed or
adaptive models, scalar, Gaussian, mixture of
Gaussian models and other advanced models
(Elgammal et al., 2002). As all models can be
applied to video as well as to range, we limit this
paper to the presentation of the simpler adaptive
scalar background model and rather stress
differences in video and range processing.
In this simple context, the adaptation of the
background B
t-1
is performed according to:
⎩
⎨
⎧
+−
=
−
−−
elseIB
FifB
B
tt
tt
t
αα
1
11
)1(
(1)
i.e. only pixels not belonging to the foreground F
t-1
(line 1) are processed by recursively substituting in
them a small part (0<α<<1) of the current image I
t
(line 2)
Then, image values which differ from the
background by more than a given threshold value ΔI
constitute the boolean change image C
t
⎩
⎨
⎧
Δ>−
=
−
elsefalse
IBIiftrue
C
tt
t
1
(2)
Finally, in the simplest way, the foreground is set
equivalent to the change image
tt
CF
=
while more generally, foreground modeling
performs an interpretation of the change image C
t
in
order to provide a best possible estimate of the
foreground F
t
.
2.2 Change Detection from Range
A specific aspect of range images lies in their
domain of definition:
}],...0{[
max
nilzZ
t
∈
(3)
i.e. they take values in a bounded range of positive
real values and can possibly take the value nil that
encodes all situations where the range camera
delivers undefined values. Such undefined range
values appear for instance in stereo cameras in
absence of texture, and in TOF cameras when the
modulated reflected signal is weak.
In this context, classical background modeling
must be adapted to the presence of nil values. In
addition, it can take into account that, unlike
intensity in video, presence in the range domain
always decreases the Z value with respect to the
background. A suited means for the updating of the
range background is:
⎪
⎩
⎪
⎨
⎧
=
=
+−
=
−
−
−
else
nilBif
F
ornilZif
ZB
Z
B
B
t
t
tt
t
t
t
)(
)(
)1(
1
1
1
αα
(4)
where the first line says there is no update in
presence of a foreground pixel or with a nil Z value;
the second line says that the background starts with
the first non-nil Z value, and the last line expresses
the standard recursive update.
Regarding the change detection, it must also
consider the nature of possibly undefined signals. In
the following definition of the change image:
else
ZZBifelse
nilBornilZif
true
false
false
C
tt
tt
t
))(
)()(
1
1
Δ<−
==
⎪
⎩
⎪
⎨
⎧
=
−
−
(5)
only pixels with valid Z and B values are considered
(line 1) and a change is not detected (line 2) unless
the decrease in range surpasses a threshold ΔZ (line
3).
Note that the presence of nil values in range
images can be partially compensated by so-called
hole filling algorithms, and multi-scale methods are
well suited to do so (Zamofing and Hügli, 2004).
PEDESTRIAN DETECTION BY RANGE IMAGING
19
This possibility can be introduced at several places
in above procedure, but is not discussed further
here.
3 RANGE CAMERAS
Two range imaging technologies are considered in
this study: stereo camera and time-of-flight (TOF)
cameras
3.1 TOF Cameras
TOF cameras measure the time needed for light to
travels from the camera to the object and back again.
Typically, the phase shift between sent and received
modulated signal is measured and converted into a
range value.
3.2 Stereo Cameras
Stereo cameras record sequences of image pairs.
The images of a pair are recorded at the same time
and represent images of the scene viewed from two
neighboring location. Stereo interpretation consists
in computing the disparity of corresponding pixels
in an image pair, and the Z range is then simply
derived. Disparity computation is quite tedious. It is
usually not performed directly in the camera but
requires a powerful computer to reach real-time
performance.
Some basic differences of the two technologies
considered are compared in table 1 below.
Table 1: Comparison of TOF and stereo ranging.
TOF Stereo
range
calculation
method
phase shift of
sent and
received light
disparity
computation of
stereo pairs
range resolution
over Z range
constant over Z
decreases with
increasing Z
range accuracy
decreases with
increasing Z
depends on
surface texture
sensitive to
ambient light
yes no
need of own
light source
yes no
sensitive to bad
surface
structure
no yes
additional
processing
needed
no yes
4 PEDESTRIAN DETECTION
EXPERIMENTS
Practical pedestrian detection experiments are
performed in order to evaluate the performance of
range detection per se, but also in comparison to
video detection.
The TOF camera is the SwissRanger
(SwissRanger) SR-02 which delivers 16 bit range
images (160x128 pixels) at a rate of 30 Hz or less,
together with an intensity image of same size. Range
is derived locally by the camera, from the measured
phase shift between sent and received modulated
light. The maximum range is limited, and set to 7.5
m in the device used.
The stereo camera is the Bumblebee (P. G.
Research, Bumblebee 3D camera). It delivers pairs
of images (1024x768) from two cameras located on
a 12 cm long baseline, at a rate of about 7 Hz.
Disparity computation is performed on a fast PC.
Because of the processing complexity, there is a
tradeoff between high resolution and high speed. A
typical range images size is 320x240.
Three different situations are considered
successively.
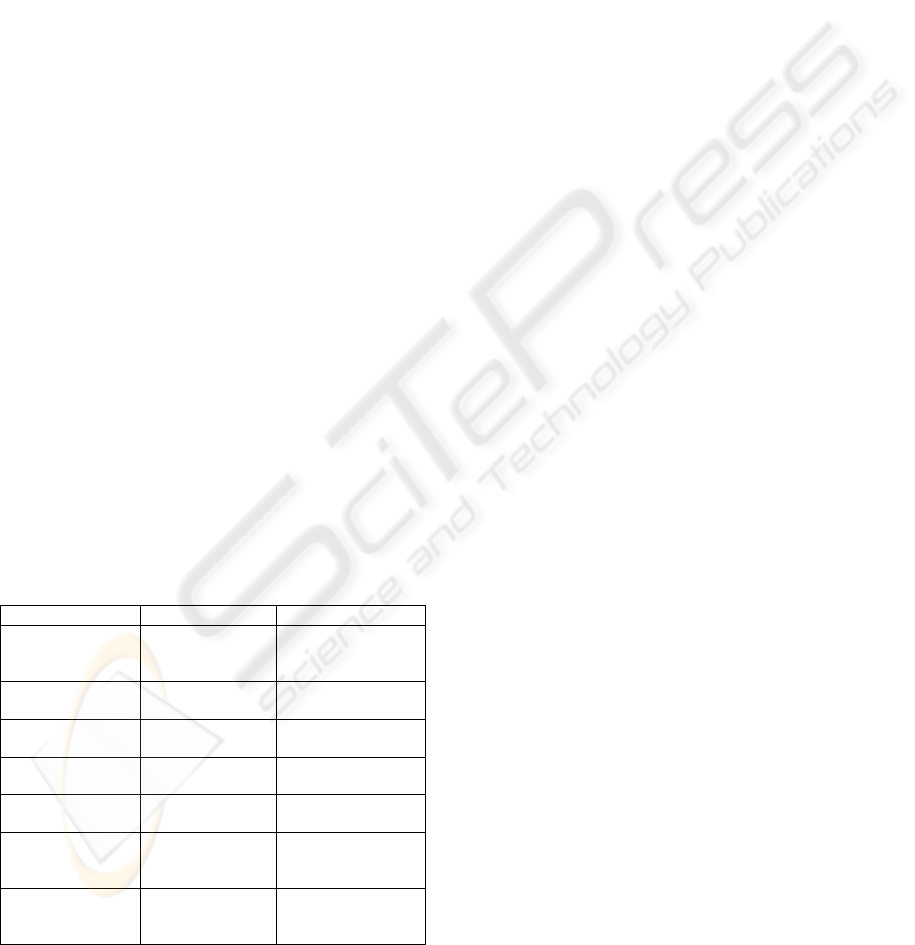
Indoor versus outdoor site: Figure 2 provides a
comparison of range imaging by stereo and TOF in
two different sites, namely an indoor and outdoor
site. Indoors, pedestrians walk along a corridor. The
range of interest is 1 to 3 m (fig. 2a and b). Both
stereo and TOF work fine.
Outdoors, the pedestrians walk along a pathway
and the distance ranges from 4 to 8 m (fig. 2c and
d). Here, only stereo works fine, because TOF is
strongly affected by sunlight illumination that
surpasses by far the camera own illumination. On
the other hand, because operated with IR light, TOF
operates also invisibly during the night, both indoors
or outdoors.
Therefore, both stereo and TOP ranging systems
are suited for pedestrian detection, each method has
specific advantages. Among main advantages of
stereo for pedestrian detection is the capability to
work indoor as well as outdoor, the availability of a
registered high-resolution video image. Among
main advantages of TOF cameras are the locally
embedded range processing, the capacity to work at
night and good object independence regarding
texture.
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
20
a) stereo indoors
b) TOF indoors
c) stereo outdoors
d) TOF outdoors
Figure 2: Range from stereo and TOF.
Road crossing site: This outdoor road crossing is
about 8 m long and the Z range of interest reaches
up to 12 m. TOF cannot be used outdoor and stereo,
given the fixed baseline, is at its practical resolution
limit at about 10 m. Stereo images are recorded in
situ and processed off-line.
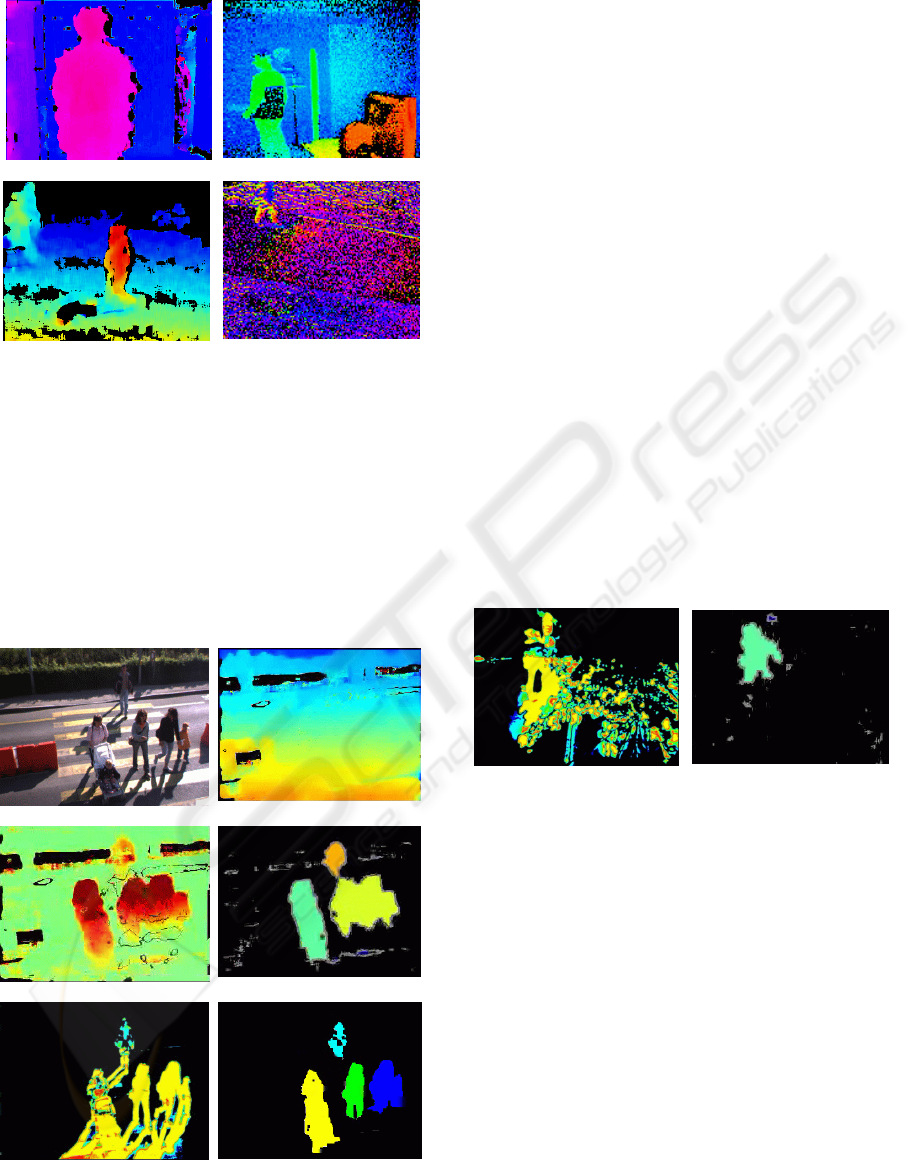
Of major interest is the pedestrian detection
illustrated in figure 3, where the scene is strongly
affected by the pedestrian shadows.
a) video
b) range background
c) range difference (B-Z)
d) pedestrians from range
e) pedestrians from video
f) pedestrians from range
and video
Figure 3: Results from the road crossing site.
Video detection (fig. 3e) labels shadows as
pedestrians which then, cannot be correctly
segmented. In contrast, range detection (fig. 3d) is
not affected by shadows and provides a correct
segmentation.
Note that a combination of video detection and
range detection provides the best result (fig. 3f).
Pathway site: A pathway for pedestrians is affected
by strong illumination changes. In one situation, fast
traveling clouds in the sky produce fast illumination
changes. In another situation, shadows from moving
trees produce even stronger and faster illumination
changes. While video detection (fig. 4a) is
completely unable to distinguish even the presence
of groups of pedestrians, stereo range detection (fig.
4b) performs correctly and detects the pedestrians
walking along the pathway.
These results confirm the capacity of range
detection to perform well in presence of illumination
changes and show therefore its robustness for people
detection. Given other weaknesses of range imaging
compared to video, like a poorer resolution, it is
suggested that optimal performance will result from
a suitable combination of both methods.
a) pedestrian from video
b) pedestrian from range
Figure 4: Results from the pathway site.
5 CONCLUSIONS
The paper considers range cameras for presence
detection, specifically for pedestrian detection where
conventional video detection systems perform
poorly due their sensitivity to shadows and
illumination changes. A first part was devoted to the
presentation of a change detection scheme that suits
the specificities of range detection, specifically by
considering the presence of undefined range values
and the property of range measurements to always
decrease in presence of objects or persons.
A second part was devoted to two ranging
systems, namely stereo and time-of-flight (TOF).
Among main advantages of stereo for pedestrian
detection is the capability to work indoor as well as
PEDESTRIAN DETECTION BY RANGE IMAGING
21

outdoor, the availability of a registered high-
resolution video image. Among main advantages of
TOF cameras are the locally embedded range
processing, the capacity to work at night and good
object independence regarding texture.
A final part was devoted to practical pedestrian
detection experiments, in particular in difficult
situations. For indoor pedestrian detection, both
stereo and TOF are suited, the later with the
advantage to be operated also by night. For outdoor
pedestrian detection, TOF is not (yet) suited and
only stereo can be used. The capability of range
detection to get rid of shadow and illumination
changes affecting strongly the video detection was
demonstrated on two sites. On the road crossing site,
range detection is not affected by the strong
pedestrian shadows cast on the road. On the
pathway site, where cast shadows from moving trees
make video detection completely hopeless, range
detection performs correctly.
Finally, using together video and range for
presence detection performs optimally, as it
combines the advantages of both worlds, essentially
good resolution for the first and good robustness for
the second.
ACKNOWLEDGEMENTS
This project was partially supported by the Swiss
Federal KTI/CTI Innovation Promotion Agency
.
Fruitful collaboration with MIS Institute and ACET
is kindly acknowledged.
REFERENCES
D. M. Beckwith and K. M. Hunter-Zaworski. Passive
pedestrian detection at unsignalized crossings.
Transportation research records, Paper No. 98-0725,
1996. URL http://www.enhancements.org/trb\1636-
016.pdf
I. Haritaoglu, D. Harwood, and L. Davis. Who, when,
where, what: A real time system for detecting and
tracking people. Proceedings of the Third Face and
Gesture Recognition Conference, pages 222--227,
1998.
G. Finlayson, S. Hordley, and M. Drew. Removing
shadows from images. 2002. URL
http://citeseer.ist.psu.edu/finlayson02removing.html.
H. Jiang and M. S. Drew. Shadow-resistant tracking in
video, 2003 URL
http://citeseer.ist.psu.edu/jiang03shadowresistant.html.
L. Jianguang & al. An Illumination Invariant Change
Detection Algorithm", Proc. ACCV, 2002
A. Elgammal, R. Duraiswami, D. Harwood, and L. S.
Davis. Background and foreground modeling using
nonparametric kernel density for visual surveillance.
Proc. of the IEEE, 90(7), pp. 1151-1163, 2002.
J. M. Ying Ming, Jingjue Jiang. Background modeling and
subtraction using a local-linear-dependence-based
cauchy statistical model, 2003. URL
www.cmis.csiro.au/Hugues.Talbot/dicta2003/cdrom/p
df/0469.pdf
P. Seitz. Solid-state time-of-flight range camera. IEEE
Journals of Quantum Electronics, 2003
T. Zamofing, H. Hügli. Range Image Filtering Using
Reliability Information. Proc. SPIE Vol. 5606-16,
2004
SwissRanger. URL http://www.swissranger.ch/
P. G. Research. Bumblebee 3D camera. URL
http://www.ptgrey.com/products/bumblebee/.
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
22
