
FACE ANALYSIS FOR HUMAN COMPUTER INTERACTION
APPLICATIONS
Javier Ruiz-del-Solar, Rodrigo Verschae, Paul Vallejos and Mauricio Correa
Department of Electrical Engineering, Universidad de Chile, Santiago, Chile
Keywords: Human-Computer interaction through face analysis, boosting, nested cascade classifiers, face detection,
multiple target tracking.
Abstract: A face analysis system is presented and employed in the construction of human-computer interfaces. This
system is based on three modules (detection, tracking and classification) which are integrated and used to
detect, track and classify faces in dynamic environments. A face detector, an eye detector and face classifier
are built using a unified learning framework. The most interesting aspect of this learning framework is the
possibility of building accurate and robust classification/detection systems that have a high processing
speed. The tracking system is based on extended Kalman filters, and when used together with the face
detector, high detection rates with a very low false positive rate are obtained. The classification module is
used to classify the faces’ gender. The three modules are evaluated on standard databases and, compared to
state of the art systems, better or competitive results are obtained. The whole system is and the system is
implemented in AIBO robots.
1 INTRODUCTION
Face analysis plays an important role for building
human-computer interfaces that allow humans to
interact with computational systems in a natural
way. Face information is by far, the most used visual
cue employed by humans. There is evidence of
specialized processing units for face analysis in our
visual system. Faces allow us the localization and
identification of other humans, and the interaction
and visual communication with them. Therefore, if
we want that humans can interact with machines
with the same efficiency, diversity and complexity
used in the human-human interaction, then face
analysis should be extensively employed in the
construction of human-computer interfaces.
Currently, computational face analysis (face
recognition, face detection, eyes detection, face
tracking, facial expression detection, etc.) is a very
lively and expanding research field. The increasing
interest in this field is mainly driven by applications
related with surveillance and security. Among many
other applications we can mention video
conferencing, human-robot interaction, surveillance,
computer interfaces, video summarizing, image and
video indexing and retrieval, biometry, and drivers
monitoring.
Face detection is a key step in almost any
computational task related with the analysis of faces
in digital images. Moreover, in many different
situations face detection is the only way to detect
persons in a given scene. Knowing if there is a
person present on the image (or video) is an
important clue about the content of the image.
In the case of human computer interaction
applications, clues about the gender, age, race,
emotional state or identity of the persons give
important context information. When having this
kind of information, the application can be designed
to respond in a different way depending on who the
user is. For example, it can respond according to the
mood, gender or age of the user. Face recognition
systems can be improved by using other clues about
the face or by having specific models (for each
gender or rage). Obviously for this we require, first
to be able to detect the faces and to implement
accurate age, gender or race classification systems.
In this general context, the aim of this paper is to
propose a face analysis system, which can be used in
the construction of human-computer interaction
applications. The proposed face analysis system can
deal (detect, track and classify) faces in dynamic
23
Ruiz-del-Solar J., Verschae R., Vallejos P. and Correa M. (2007).
FACE ANALYSIS FOR HUMAN COMPUTER INTERACTION APPLICATIONS.
In Proceedings of the Second International Conference on Computer Vision Theory and Applications, pages 23-30
DOI: 10.5220/0002069400230030
Copyright
c
SciTePress
environments. It has been implemented on AIBO
robots and it performs with high accuracy as it will
be shown when evaluated on standard databases.
An essential requirement of this kind of system is
that it must be based in a highly robust and fast face
detector. Our face detector, eye detector and gender
classifier are built using a unified learning
framework based on nested cascades of boosted
classifiers (Verschae et al. 2006b; Verschae et al.
2006a). Key concepts used in the learning
framework are boosting (Schapire and Singer,
1999), nested cascade classifiers (Wu et al., 2004),
and bootstrap training (Sung and Poggio, 1998). The
tracking is implemented using extended Kalman
filters.
The article is structured as follows. In section 2
the learning framework that is used to train the
cascade classifiers is presented. In section 3 the face
detector is presented and some results of its
performance are outlined. In section 4 the tracking
system is described and evaluated. In section 5 the
implementation of the face analysis system on Aibo
robots is presented. Finally, some conclusions and
projections of this work are given in section 6.
2 LEARNING FRAMEWORK
Key concepts used in the learning framework are
boosting (Schapire and Singer, 1999), nested
cascade classifiers (Wu et al., 2004), and bootstrap
training (Sung and Poggio, 1998). A detailed
description of this framework is given in (Verschae
et al., 2006b).
Boosting is employed for finding (i) highly
accurate hypotheses (classification rules) by
combining several weak hypotheses (classifiers),
each one having a moderate accuracy, and (ii) self-
rated confidence values that estimate the reliability
of each prediction (classification).
Cascade classification uses several layers
(stages) of classifiers of increasing complexity (each
layer discards non-object patterns) for obtaining an
optimal system in terms of classification accuracy
and processing speed (Viola and Jones, 2001). This
is possible because of two reasons: (i) there is an
important difference in the a priori probability of
occurrence of the classes, i.e. there are much more
non-object than object patterns, and (ii) most of the
non-objects patterns are quite different from the
object patterns, therefore they can be easily
discarded by the different layers. Nested cascade
classification allows to obtain higher classification
accuracy by the integration of the different cascade
layers (Wu et al., 2004).
Other aspects employed in the proposed
framework for obtaining high-performance
classification systems are: using the bootstrap
procedure (Sung and Poggio, 1998) to correctly
define the classification boundary, LUTs (Look-Up
Tables) for a fast evaluation of the weak classifiers,
simple rectangular Haar-like features that can be
evaluated very fast using the integral image (Viola
and Jones, 2001), and LBP features (Fröba and
Ernst, 2004) that are invariant against changing
illumination.
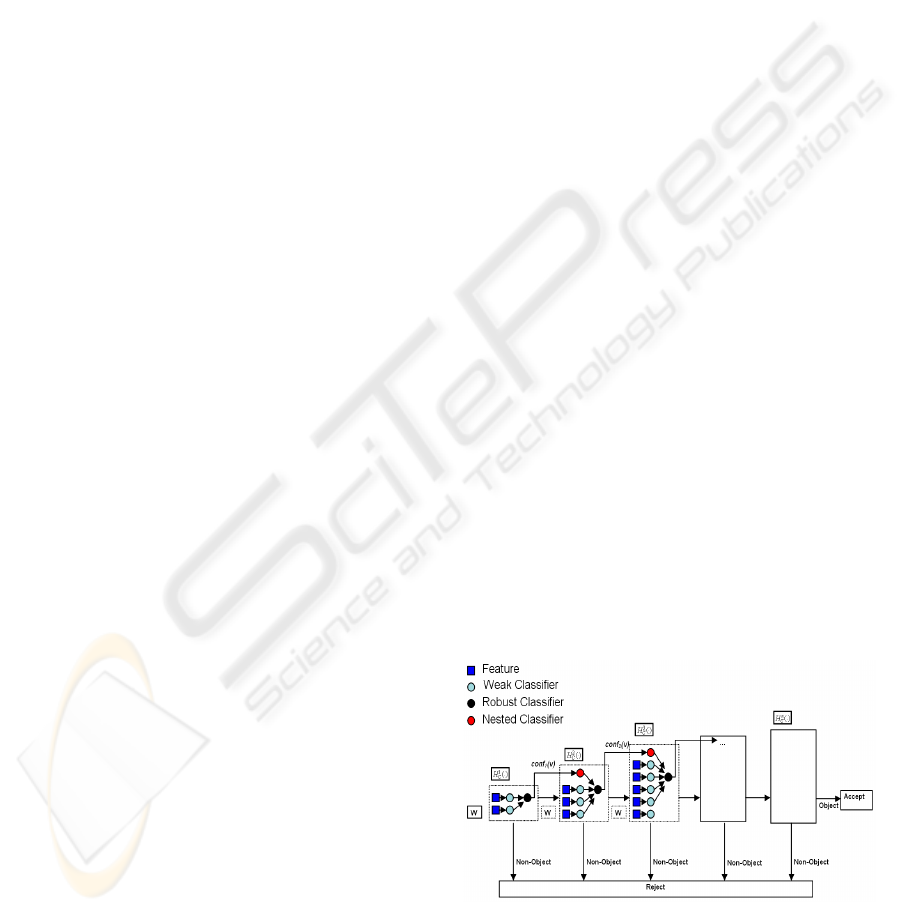
2.1 Boosted Nested Cascade
A nested cascade of boosted classifiers is composed
by several integrated (nested) layers, each one
containing a boosted classifier. The whole cascade
works as a single classifier that integrates the
classifiers of every layer. A nested cascade,
composed of M layers, is defined as the union of M
boosted classifiers
k
C
H
each one defined by:
with
0)( =xH
k
C
and
k
t
h
the weak classifiers,
k
T
the
number of weak classifiers in layer k, and b
k
a
threshold value. It should be noted that a given
classifier corresponds to the nesting (combination)
of the previous classifiers. The output of
k
C
H
is a
real value that corresponds to the confidence of the
classifier and its computation makes use of the
already evaluated confidence value of the previous
layer of the cascade (see figure 1).
Figure 1: Block diagram of the boosted nested cascade
classifier.
k
T
t
k
t
k
C
k
C
bxhxHxH
k
−+=
∑
=
−
1
1
)()()(
(1)
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
24
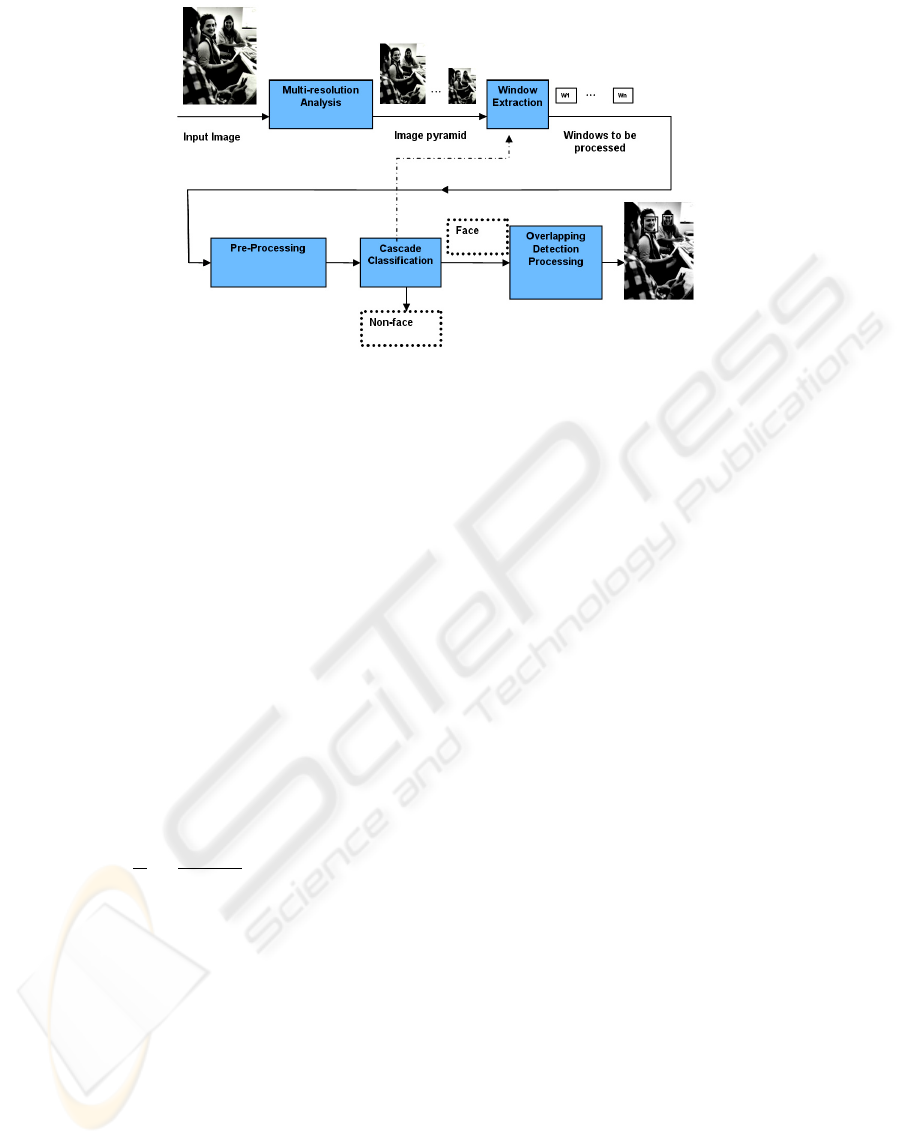
Figure 2: Block diagram of a face detection system.
Each weak classifier is applied over one feature
computed in every pattern to be processed. The
weak classifiers are designed after the domain-
partitioning weak hypotheses paradigm (Schapire
and Singer, 1999). Under this paradigm the weak
classifiers make their predictions based on a
partitioning of a feature domain F. A weak
classifier h will have an output for each partition
block, F
j
, of its associated feature f:
jj
Fxfcxfh ∈∋= )())((
. Thus, the weak
classifiers prediction depends only on which block
F
j
a given sample (instance) falls into. For each
classifier, the value associated to each partition
block (c
j
), i.e. its output, is calculated for
minimizing a bound of the training error and at the
same time a bound on an exponential loss function
of the margin (Schapire and Singer, 1999). This
value is given by:
and
ε
a regularization parameter (Schapire and
Singer, 1999).
A slightly modified version of the real
Adaboost learning algorithm (Verschae et al.
2006b) is employed for selecting the features and
training the weak classifiers taking into account the
nested configuration of the cascade.
3 DETECTION SYSTEM
In the following we briefly present the developed
face detection system. The block diagram of the
face detection systems is presented in figure 2.
First, for detecting faces at different scales a
multiresolution analysis is performed by scaling
the input image by a factor of 1.2 (Multiresolution
Analysis module). This scaling is performed until
images of about 24x24 pixels are obtained.
Afterwards, windows of 24x24 pixels are extracted
in the Window Extraction module for each of the
scaled versions of the input image. The extracted
windows can be then pre-processed for obtaining
invariance against changing illumination. Thanks
to the use of features which are invariant against
changing illumination to a large degree we do not
perform any kind of preprocessing.
Afterwards, the windows are analyzed by the
nested cascade classifier (Cascade Classification
Module) built with the framework described in
section 2. Finally, in the Overlapping Detection
Processing module, the windows classified as
faces are fused (normally a face will be detected at
different scales and positions) for obtaining the
size and position of the final detections. This
fusion is described in (Verschae and Ruiz-del-
Solar, 2003).
The eye detector works in the same was as the
face detector does, the only difference is that the
search is not done within the whole image, but
only within the face. As the face detector, the eye
detector woks on 24x24 windows, therefore it can
be used only on faces of 50x50 pixels or larger.
The gender classifier was built using the
learning framework as the eye and face detectors.
The gender classifier works on windows of 24x24
pixels and when the eye positions are available it
uses them for aligning the faces. In (Verschae et al.
2006a) we give a detailed description and
evaluation of the gender classifier.
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
+
=
−
+
ε
ε
j
j
j
W
W
c
1
1
ln
2
1
(2)
1],)(Pr[ ±==∧∈= llyFxfW
ij
j
l
(3)
FACE ANALYSIS FOR HUMAN COMPUTER INTERACTION APPLICATIONS
25
Table 1: Comparative evaluation (DR: Detection Rate) of the face detector on the BioID Database (1,521 images).
False Positives DB 0 1 2 3 6 15 17 25
Out Method UCHILE 87.8 88.0 94.8 98.5
Out Method FERET 98.7 99.5 99.7
Out Method BIOID 94.1 95.1 96.5 96.9 97.6 98.1
Fröba and Ernst 2004 BIOID ~50 ~65 ~84 ~98
Table 2: Comparative evaluation (DR) of the face detector on the CMU-MIT database (130 images, 507 faces). Notice that
in (Fröba et al. 2004) a subset of 483 (out of 507) faces is considered. This subset is called CMU 125 testset.
False Positives 0 3 5 6 10 13 14 19 25 29 31 57 65
Our Method 77.3 83.2 86.6 88 89.9 90.1 92.1
Fröba et al. 2004 ~66 ~87 ~90
Wu et al. 2004 89 90.1 90.7 94.5
Viola and Jones 2001 76.1 88.4 92
Rowley et al.1998 83.2 86
Schneiderman 2004 89.7 93.1 94.4
Li. et al. 2002 83.6 90.2
Delakis and Garcia 2004 88.8 90.5 91.5 92.3
For testing purposes we employed four databases
(BIOID, 2005), FERET (Phillips et al. 1998), CMU-
MIT (Rowley et al 1998), and (UCHFACE, 2006).
No single image from these databases was used for
the training of our systems. Selected examples of our
face detection, at work in the FERET, BIOID,
UCHFACE and MIT-CMU databases, are shown in
figure 3. The figures also show eyes detection and
gender classification.
The face detector was evaluated using two types
of databases: (a) BIOID and FERET, which contain
one face per image, and (b) CMU-MIT and
UCHFACE, which contain none, one or more faces
per image. Table 1 shows results of our method for
the FERET, BIOID and UCHILE databases as well
as the results for (Fröba and Ernst 2004) for the
BIOID database.
In the BIOID database, which contains faces
with variable expressions and cluttered backgrounds,
we obtain a high accuracy, a 94.1% detection rate
with zero false positives (in 1521 images), while on
the FERET database, which contains faces with
neutral expression and homogeneous background,
we obtain a very high accuracy, a 99.5% detection
rate with 1 false positive (in 1016 images). These
results were obtained without considering that there
is only one face per image.
In the UCHFACE database (343 images), which
contains faces with variable expressions and
cluttered backgrounds, we consider that the obtained
results are rather good (e.g. 88.0% with 3 false
positives, 98.5% with 17 false positives).
The table 2 shows comparative results with state
of the art methods fot the CMU-MIT database. In
the CMU-MIT database we also obtain good results
(e.g. 83.2% with 5 false positives and 88% with 19
false positives). If we compare to state of the art
methodologies in terms of DR and FP, we obtain
better results than (Viola and Jones, 2001; Rowley et
al, 1998), slightly better results than (Li et al, 2002),
slightly worse results than (Delakis and Garcia,
2004) (but our system is is about 8 times faster), and
worse results than (Wu et al. 2004) and
(Schneiderman, 2004). We think we have lower
detection rates than (Wu et al. 2004) and
(Schneiderman, 2004) mainly because of the size of
the training database. For example in (Wu et al.
2004) 20,000 training faces are employed while our
training database consists of 5,000 face images.
Notice that our classifier is among the fastest ones.
The ones that have a comparable processing time are
(Viola and Jones 2001), (Fröba et al. 2004), (Wu et
al. 2004) and (Li. et al. 2002).
The gender classifier performance was evaluated
in two cases: when the eyes were manually
annotated and when the eyes were automatically
detected. Table 3 shows results of this evaluation for
the UCHFACE. FERET and BIOID databases. It is
should be noticed that its behaviour is very robust to
changes in the eyes positions that are used for the
face alignment and that in two of the databases best
results are obtained when the eye detector is used.
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
26
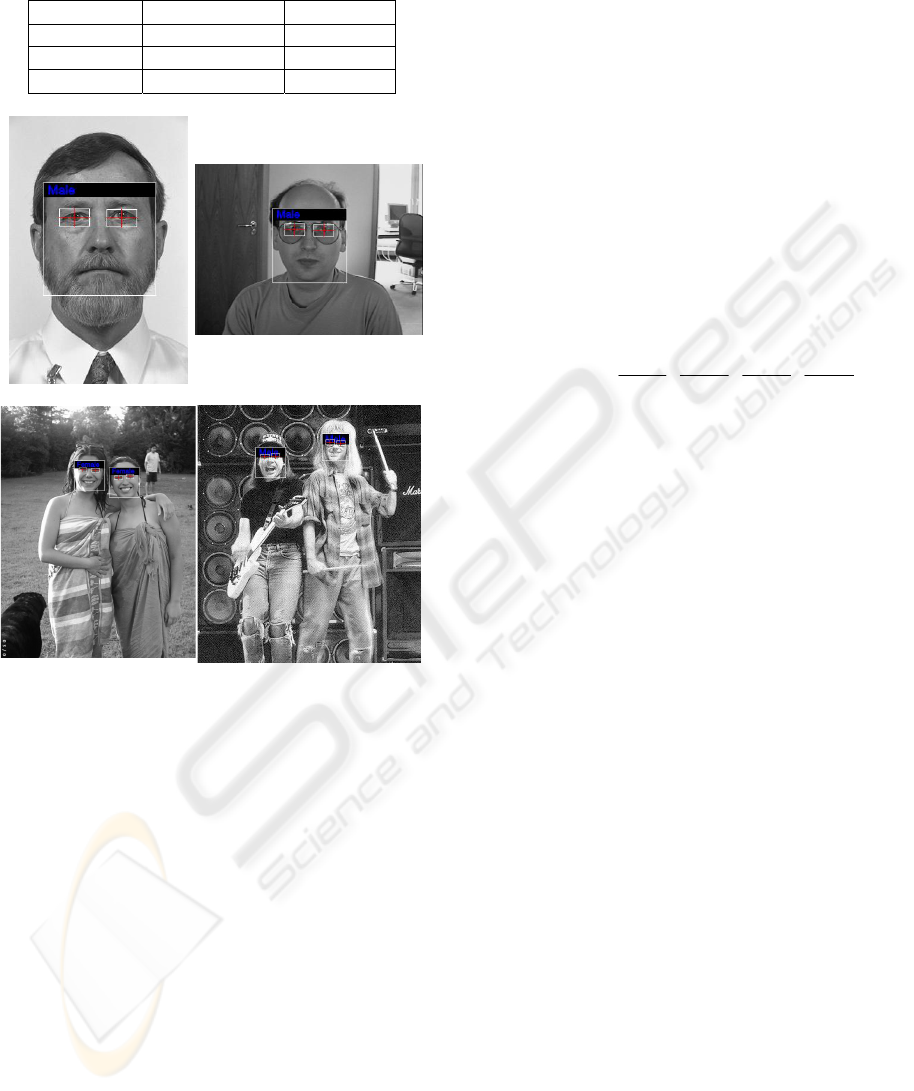
Table 3: Gender classification results: Percentage of
correct classification when eyes are annotated or detected.
Database Annotated eyes Detected eyes
UCHFACE 81.23 % 80.12%
FERET 85.56 % 85.89%
BIOID 80.91 % 81.46%
(a) (b)
(c) (d)
Figure 3: Selected examples of our face detection, eyes
detection and gender classification systems at work on the
FERET (a), BIOID (b), UCHFACE (c) and MIT-CMU (d)
databases.
4 FACE TRACKING USING
KALMAN FILTERS
The tracking of the faces is based mainly on the use
of Extended Kalman Filters (EKFs). Although from
the theoretical point of view it can be argued that
Particle Filters (e.g. (Isard and Blake 1998) are
superior than EKF because of the Gaussianity
hypothesis (Dudek, and Jenkin, 2002), our
experience with self-localization algorithms for
mobile robotics (Lastra et al., 2004) tell us that the
performance of both kind of filters in tracking and
self-localization tasks is rather similar. Moreover, it
is possible to obtain a very fast implementation of
the EKF if the state vector is small, as in our case,
because for each tracked object a different EKF is
employed. This is very important when several
objects are tracked at the same time.
4.1 State Vectors and Parameters
Database
Each object (face) is characterized by its position in
pixels in the frame, its width, its height, and the
corresponding changing rates of these variables. The
eight variables are the state vector of a first order
EKF (
k
x
). The parameters database (DB) stores the
latest state vector (
1−k
x
) for each object under
tracking and its associated EKF. Since the detected
features do not include the change rate components,
these components are estimated as:
z
k
T
= z
k
1
z
k
2
z
k
3
z
k
4
z
k
1
−x
k−1
1
Δt
z
k
2
−x
k−1
2
Δt
z
k
3
−x
k−1
3
Δt
z
k
4
−x
k−1
4
Δt
⎛
⎝
⎜
⎞
⎠
⎟
T
(4)
With
k
z
the vector of observations. The update
model is:
1
ˆ
0..0
:
0
10..:
010
0010
00010..0
ˆ
−
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎠
⎞
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎝
⎛
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎠
⎞
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎝
⎛
−=
kk
Δt xIx
(5)
4.2 Tracking Procedure
The block diagram of the multiple face detection and
tracking system is shown in figure 4. Input images
are analyzed in the Face Detector module, and
detected faces are further processed by the Detected-
Tracked Object Matching module. In this module
the detected faces are matched with the current
objects under tracking. Each new detection (a face
window) is evaluated in the Gaussian function
described by the state vector and its covariance
matrix on the Kalman filter of each object. In this
way, a matching probability is calculated. If the
matching probability is over a certain threshold, the
detected face is associated with the corresponding
object. If no object produces a probability value over
that threshold, then the detected face is a new
candidate object, and a new state vector (and
Kalman filter) is created for this new object (New
Object Generator module).
FACE ANALYSIS FOR HUMAN COMPUTER INTERACTION APPLICATIONS
27

Table 4: Face detection results on the sets A and B from
PETS-ICVS 2003.
Set A Detection Rate [%] 67,9 62,1 50,8 44,9 36,2
# False Positives 851 465 334 292 242
Set B Detection Rate [%] 67,2 60,9 53,5 44,7 37,9
# False Positives 88 50 37 32 22
Table 5: Face detection results, after tracking, on set A
from PETS-ICVS 2003.
Tracking
Parameters
MCF MCF
False
Positive
Detection
Rate [%]
False
Positive
Decremen
t
Detection
Rate
Increment
3 5 2.0 525 65,19 35,0% 10,7%
3 7 2.0 530 65,23 34,4% 11,0%
2 2 2.0 536 65,71 33,7% 11,8%
2 5 2.0 580 66,76 28,2% 13,6%
2 7 2.0 580 66,76 28,2% 13,6%
3 5 1.0 625 68,51 22,6% 16,5%
3 7 1.0 655 68,96 18,9% 17,3%
2 2 1.0 629 68,74 22,2% 16,9%
1 2 2.0 683 68,31 15,5% 16,2%
1 5 2.0 700 68,59 13,4% 16,7%
1 7 2.0 700 68,59 13,4% 16,7%
2 5 1.0 738 70,10 8,7% 19,2%
2 7 1.0 750 70,23 7,2% 19,5%
Table 6: Face detection results, after tracking, on set B
from PETS-ICVS 2003.
Tracking
Parameters
CTO MCF Q
False
Positive
Detection
Rate[%]
False
Positive
Decrement
Detection
Rate
Increment
3 5 1.0 69 68,9 21,6% 2,5%
3 7 1.0 71 68,9 19,3% 2,5%
2 2 1.0 71 689 19,3% 2,5%
1 2 2.0 72 68,0 18,2% 1,2%
1 5 2.0 76 68,1 13,6% 1,3%
1 7 2.0 76 68,1 13,6% 1,3%
2 5 1.0 80 69,8 9,1% 3,9%
2 7 1.0 80 69,9 9,1% 4,0%
3 5 0.5 85 70,7 3,4% 5,2%
2 2 0.5 87 70,6 1,1% 5,1%
3 7 0.5 88 70,7 0,0% 5,2%
For each object under tracking, the prediction
model estimates its a priori state (Object State
Prediction module). Then, the a priori state is
updated using all the detections associated with this
state in the matching stage (Object Update module).
If any candidate object accomplish the promote
rule (over a certain amount of detections in a
maximal amount of frames) then it becomes a true
object (Candidate Promoter module). Finally, if a
candidate object has more than a certain amount of
frames with not enough associated detections (below
a certain threshold), it is eliminated from the
database (Object Filter module). True objects with
state probability below a certain threshold are also
eliminated from the database.
4.3 Multiple Detection and Tracking in
Dynamic Environments
We have integrated the face detection and tracking
system, building a system for the tracking of
multiple faces in dynamic environments. As it will
be shown, this system is able to detect and track
faces with a high performance in real-world videos,
and with an extremely low number of false positives
compared to state of the art methodologies.
In order to test performance of our multiple face
detection and tracking system we employed the
PETS-ICVS 2003 dataset. The PETS initiative
corresponds to a very successful series of workshops
on Performance Evaluation of Tracking and
Surveillance. The PETS 2003 topic was gesture and
action recognition, more specifically the annotation
of a "smart meeting" (includes facial expressions,
gaze and gesture/action). The PETS-ICVS 2003
dataset (PETS, 2003) consists of video sequences
(frame from 640x480 pixels) captured by three
cameras on a conference room. Two cameras
(camera 1 and 2) were placed on opposite walls
capturing the participant on each side of the room,
and the third camera (camera 3) is an
omnidirectional camera on the desk center. The
dataset is divided in four scenarios A, B, C and D.
For this analysis frames from scenarios A, B, and D,
and cameras 1 and 2, were used. The ground truth
consists of the eyes coordinates for those frames
divisible by 10. In our experiments all frames were
processed, but for statistics just two sets of images
were considered: (i) Set A: all annotated frames, i.e.
frames with frame number divisible by 10, and (ii)
Set B: frames with frame number divisible by 100.
The set A contains 49,350 frames and 10,308
annotated faces, while the set B contains 4,950
frames and 1,000 annotated faces.
In table 4 are shown the detection results
obtained by our face detector (without the tracking)
on both sets. These results are much better than the
ones reported in (Cristinacce and Cootes, 2003),
where the Fröba-Kullbeck detector (Fröba and
Küblbeck, 2002) and the Viola&Jones detector
(Viola and Jones, 2001) were tested on the set B. In
that test the Viola&Jones detector outperforms the
Fröba-Kullbeck, but the results it obtains are very
poor, 50% DR with 202 false positives or 62.2% DR
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
28

with 2,287 false positives. We can conclude that our
face detector performs very well in this real-world
dataset (4,950 frames), and that the amount of FP is
extremely low.
We analyzed the performance of our tracking
system and we quantify the improvement in the face
detection process when using such a system. We
have analyzed the behavior of three different
parameters of the tracking system:
• CTO (Candidate to true object) threshold:
A new detection is immediately added to
the database in order to track it, but it is not
considered as a true tracked object until
CTO other detections are associated with it.
• MCF (Max candidate frames): If a
candidate to object does not reach the CTO
threshold in MCF frames since it was added
to the database, it is eliminated.
• Q: This is the covariance of the process
noise in the Kalman filter.
In table 5 and 6 are shown the detection results after
applying the tracking system on sets A and B. It can
be seen that thanks to the tracking, the number of FP
decreases largely, up to 21% in set B and 35% in set
A, and that at the same time the DR increases.
5 PERSON DETECTION AND
TRACKING FOR AIBO
ROBOTS
Sony AIBO robots correspond to one of most
widespread and popular personal robots. Thousands
of children and researchers employ AIBO robots for
entertainment or research. We believe that in a near
future personal robots will be far more widespread
than today. One of the basic skills that personal
robots should integrate is the face-based visual
interaction with humans. Robust face analysis is a
key step in this direction. For implementing such a
system we adapted the face analysis system already
described for Sony AIBO robots model ERS7.
ERS7 robots have a 64bit RISC Processor (MIPS
R7000) from 576 MHz, 64MB RAM and a color
camera of 416x320 pixels that delivers 30fps. The
face and tracking detection system was integrated
with our robot control libraryU-Chile1 (Lastra et al
2004)(Ruiz-del-Solar et al, 2005b). U-Chile1 is
divided in five task-oriented modules: Vision, which
contains mostly low-level vision algorithms,
Localization, in charge of the robot self-localization,
Low-level Strategy, in charge of the behavior-based
control of the robots, High-level Strategy, in charge
of the high level robot behavior and strategy, and
Motion Control, in charge of the control of the robot
movements. U-Chile1 runs in real-time and after the
integration with the tracking system we were able of
running our face detection and tracking system at a
rate of 2fps. We included also eyes detection and
gender classification. In figure 5 are shown some
selected examples of face detection and tracking
using an AIBO ERS7. The system detects faces,
gender classification and eyes detection. More
examples can be seen in (UCHFACE, 2005).
6 CONCLUSIONS
Face analysis plays an important role for building
human-computer interfaces that allow humans to
interact with computational systems in a natural
way. Face information is by far, the most used visual
cue employed by humans. In this context in the
present article we have proposed face analysis
system that can be used to detect, track and classify
(gender) faces. The proposed system can be used in
the construction of different human-computer
interfaces.
The system is based on a face detector with high
accuracy, a high detection rate with a low number of
false positives. This face detector obtains the best-
reported results in the BioID database, the best
reported results in the PETS-ICVS 2003 dataset, and
the third best reported results in the CMU-MIT
database.
The face detector was integrated with a tracking
system for building a system for the tracking of
multiple faces in dynamic environments. This
system is able to detect and track faces with a high
performance in real-world videos, and with an
extremely low number of false positives compared
to state of the art methodologies. We also integrated
our face analysis and tracking system into the Sony
AIBO robots. In this way the AIBO robots can
interact with persons using the human faces and the
gender and eye information.
Beside the already mentioned projects, we are
currently applying our face analysis system for
developing a service robot that interacts with
humans using face information and on a retrieval
tool for searching persons on image and video
databases.
FACE ANALYSIS FOR HUMAN COMPUTER INTERACTION APPLICATIONS
29

ACKNOWLEDGEMENTS
This research was funded by Millenium Nucleus
Center for Web Research, Grant P04-067-F, Chile.
Portions of the research in this paper use the FERET
database of facial images collected under the FERET
program.
REFERENCES
BioID, 2005.Face Database. Available on August 2005 in:
http://www.bioid.com/downloads/facedb/index.php
Cristinacce, D. and Cootes, T., 2003. “A Comparison of
two Real-Time Face Detection Methods”, 4th IEEE
Int. Workshop on Performance Evaluation of Tracking
and Surveillance – PETS 2003, pp. 1-8, Graz, Austria.
Fröba, B. and Küblbeck, Ch., 2002. Robust face detection
at video frame rate based on edge orientation features.
5th Int. Conf. on Automatic Face and Gesture
Recognition FG - 2002, pp. 342–347.
Fröba, B. and Ernst, A., 2004. “Face detection with the
modified census transform”, 6th Int. Conf. on Face
and Gesture Recognition - FG 2004, pp. 91–96, Korea.
Delakis, M. and Garcia, C., 2004. “Convolutional face
finder: A neural architecture for fast and robust face
detection”, IEEE Trans. Pattern Anal. Mach. Intell.,
26(11):1408 – 1423.
Dudek, G., and Jenkin, M., 2002. Computational
Principles of Mobile Robotics, Cambridge University
Press.
Isard, M., and Blake, A., 1998. “Condensation –
Conditional Density Propagation for Visual Tracking”,
Int. J. of Computer Vision, Vol. 29, N. 1, pp. 5—28.
Lastra, R., Vallejos, P., and J. Ruiz-del-Solar, 2004.
“Integrated Self-Localization and Ball Tracking in the
Four-Legged Robot Soccer League”, 1st IEEE Latin
American Robotics Symposium – LARS 2004, pp. 54
– 59, Oct. 28 – 29, México City, México.
Li, S.Z., Zhu, L., Zhang, Z.Q., Blake, A., Zhang, H.J. and
Shum, H., 2002. “Statistical Learning of Multi-view
Face Detection”, 7th European Conf. on Computer
Vision – ECCV 2002, (Lecture Notes in Computer
Science; Vol. 2353), pp. 67 – 81.
PETS, 2003. Home Page. Available on August 2005 in:
http://www.cvg.cs.rdg.ac.uk/PETS-ICVS/pets-icvs-
db.html
Phillips, P. J., Wechsler, H., Huang, J.and Rauss, P., 1998.
“The FERET database and evaluation procedure for
face recognition algorithms,” Image and Vision
Computing J., Vol. 16, no. 5, pp. 295-306.
Rowley, H., Baluja, S. and Kanade, T., 1998. “Neural
Network-Based Detection”, IEEE Trans. Pattern Anal.
Mach. Intell., Vol.20, No. 1, 23-28.
Ruiz-del-Solar, J., Vallejos, P., Lastra, R., Loncomilla, P.,
Zagal, J.C., Morán, C., and Sarmiento, I., 2005b.
“UChile1 2005 Team Description Paper”, RoboCup
2005 Symposium, July 13 – 17, Osaka, Japan.
Schapire, R.E. and Singer, Y., 1999. Improved Boosting
Algorithms using Confidence-rated Predictions,
Machine Learning, 37(3):297-336.
Schneiderman, H., 2004. Feature-Centric Evaluation for
Efficient Cascade Object Detection, IEEE Conference
of Computer Vision and Pattern Recognition – CVPR
2004, pp. 29 - 36.
Sung, K. and Poggio, T., 1998. “Example-Based Learning
for Viewed-Based Human Face Deteccion”, IEEE
Trans. Pattern Anal. Mach. Intell., Vol.20, N. 1, 39-51.
UCHFACE, 2005. Computational Vision Group,
Universidad de Chile. Available on August 2005 in:
http://vision.die.uchile.cl/
Verschae, R. and Ruiz-del-Solar, J., 2003. “A Hybrid Face
Detector based on an Asymmetrical Adaboost Cascade
Detector and a Wavelet-Bayesian-Detector”, Lecture
Notes in Computer Science 2686 (IWANN 2003),
Springer, pp. 742-749, Menorca, Spain.
Verschae, R., Ruiz-del-Solar, J., Correa, M., 2006a.
Gender Classification of Faces Using Adaboost, In
Proc of CIARP, LNCS 4225.
Verschae, R., Ruiz-del-Solar, J., Correa, M. and Vallejos,
P. 2006b. A Unified Learning Framework for Face,
Eyes and Gender Detection using Nested Cascades of
Boosted Classifiers, Tech.Report UCH-DIE-VISION-
2006-02, Dept. of Elect. Eng., Universidad de Chile.
Viola, P. and Jones, M., 2001. "Rapid object detection
using a boosted cascade of simple features", IEEE
Conf. on Computer Vision and Pattern Recognition -
CVPR, Kauai, HI, USA, 2001, pp. 511 - 518.
Wu, B., AI, H. , Huang, C. and Lao, S., 2004. “Fast
rotation invariant multi-view face detection based on
real Adaboost”, 6th Int. Conf. on Face and Gesture
Recognition - FG 2004, pp. 79–84, Seoul, Korea.
Figure 5: Examples of the face detection and tracking
system for AIBO robots. The system detect faces and
performs gender classification. When the resolution of the
faces is larger than 50x50 pixels it detects also the eyes.
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
30
