
DYNAMIC CONTEXT DRIVEN HUMAN DETECTION AND
TRACKING IN MEETING SCENARIOS
Peng Dai, Linmi Tao and Guangyou Xu
Key Lab on Pervasive Computing, Ministry of Education, Tsinghua University, Beijing, China
Keywords: On-the-spot archiving, dynamic context, human detection and tracking, meeting scenarios.
Abstract: As a significant part of context-aware systems, human-centered visual processing is required to be adaptive
and interactive within dynamic context in real-life situation. In this paper a novel bottom-up and top-down
integrated approach is proposed to solve the problem of dynamic context driven visual processing in
meeting scenarios. A set of visual detection, tracking and verification modules are effectively organized to
extract rough-level visual information, based on which a bottom-up context analysis is performed through
Bayesian Network. In reverse, results of scene analysis are applied as top-down guidance to control refined
level visual processing. The system has been tested under real-life meeting environment that includes three
typical scenarios: speech, discussion and meeting break. The experiments show the effectiveness and
robustness of our approach within continuously changing meeting scenarios and dynamic context.
1 INTRODUCTION
Context-aware systems incorporate multi-modal
information so as to extract semantic understanding
of current situation and provide proactive services to
users, among which visual information plays a
significant role due to its expressiveness and
unintrusiveness. Visual detection and tracking of
human objects may be a prerequisite for the
recognition of human physical and mental states and
interactive events, which is essential for those
human-centered applications.
Two significant issues lie in the research of
context-aware vision systems. Firstly, online
analysis of events and context is required so that the
context-aware systems might provide services in
real-time. Secondly, it is difficult to solve the
paradox between low-level visual processing and
high-level semantic analysis. In real-life applications
context model should be dynamic, which could
generate flexible requirements for visual processing
mechanism. Therefore context-aware systems must
be able to analyze context online, and detect and
track human objects in dynamic context. Few
research efforts have been attributed to the issue of
human detection and tracking in dynamic context.
Meeting room has been demonstrated to be an
appropriate research platform for the study of
individual and group events analysis (Hakeem and
Shah, 2004; McCowan et al., 2005; Zhang et al.,
2006). Context model is dynamic during meetings,
which not only includes the changes of meeting
scenarios, but also covers the changes of individual
states or interactive situations. How to deal with
low-level feature extraction in such a dynamic
context model is a challenging task. Thus we focus
our research on online meeting analysis in this paper.
Some researchers have worked on the semantic
analysis of meeting video sequences (Hakeem and
Shah, 2004; McCowan et al., 2005; Hames and
Rigoll, 2005; Zhang et al., 2006), however most of
the related work in this domain adopted offline
processing frameworks and did not take dynamic
context into account, which means high-level
context information is not adopted as the online
guidance and control of low-level visual processing.
An ontology and taxonomy framework was
proposed in (Hakeem and Shah, 2004) for the offline
classification of meeting videos. Head and hand
related events were detected by Finite State
Machines based on the tracking result of
participants’ heads and hands. Those events were
further used for meeting scenario classification by
rule-based systems. McCowan et al. (McCowan et
al., 2005; Zhang et al., 2006) used Layered Hidden
Markov Models for the recognition of individual and
group actions in meetings based on audio-visual
information. Similarly in (Hames and Rigoll, 2005)
31
Dai P., Tao L. and Xu G. (2007).
DYNAMIC CONTEXT DRIVEN HUMAN DETECTION AND TRACKING IN MEETING SCENARIOS.
In Proceedings of the Second International Conference on Computer Vision Theory and Applications, pages 31-38
DOI: 10.5220/0002070200310038
Copyright
c
SciTePress

Dynamic Bayesian Network was adopted for the
recognition of group actions in meeting scenarios.
All the approaches mentioned above performed
offline context analysis, and visual processing was
performed based on predetermined and fixed context.
Recently some research literatures are referring
to the research issue of dynamic context in smart
environments. A distributed system paradigm was
presented for a long-term research of dynamic
context capture in indoor environments (Trivedi et
al., 2005). Multiple sensors were set in the
environment and various visual modules such as
human detection, tracking and identification were
integrated to extract visual information. However,
dynamic context here only denoted changes of user’s
location and face orientation in the environment,
based on which a top-down control was performed
for the best perspective selection among multiple
cameras. In our work dynamic context is targeted at
higher level semantics, including both the individual
object events and the overall scenario types.
Previous visual approaches for human presence
detection and tracking in meeting environment could
not combine various visual cues effectively, hence
requirements of real-time and long-term processing
in real-life applications could not be matched.
Waibel et al. (Waibel et al., 2003) adopted motion
and color cues for the segmentation and tracking of
human bodies in meeting rooms. Head poses are
important cues for the estimation of participants’
focus of attention. In (Stiefelhagen et al., 2002),
Neural Network models were employed for face
detection and pose estimation, Bayesian Network
was applied to estimate people’s focus of attention.
In Hakeem’s work (Hakeem and Shah, 2004)
tracking algorithms for human head and hands
required manual intervention.
In this paper, a novel approach is proposed to
solve the problem of context-aware human detection
and tracking. A bottom-up and top-down integrated
visual processing framework is addressed to solve
the paradox between the acquisition of visual cues
and dynamic context model. Bayesian Network is
adopted to analyze the changing context in a bottom-
up way, based on the coarse information of human
objects and the meeting room settings. Reversely,
refined level information is extracted based on the
requirements of current context information.
Additionally, an effective hypothesis-verification
approach is proposed to solve the problem of human
detection in indoor environment. Potential human
objects are detected and tracked based on multiple
visual cues, and are further verified with an efficient
face detection module.
Thus the major contribution of this paper can be
addressed as follows:
An adaptive visual processing mechanism in
dynamic context;
A hypothesis-verification mechanism for
human detection and tracking in indoor
environment.
Based on the approach, our paper is organized as
follows. Section 2 introduces On-the-Spot Archiving
System we used as the research framework. Section
3 describes the hypothesis-verification mechanism
for human detection and tracking. In Section 4 a
context analysis framework is given, and Section 5
presents the refined level visual modules which can
is selectively determined by dynamic context.
Experimental results are presented and discussed in
Section 5, and Section 6 concludes this paper.
2 ON-THE-SPOT ARCHIVING
SYSTEM
Traditional multimedia meeting corpus (Hakeem and
Shah, 2004; McCowan et al., 2005) records all the
audio-visual information in meetings, which lacks
the capabilities of online meeting highlights
detection and indexing. In our work, an intelligent
multimedia archiving system named On-the-Spot
Archiving System (OSAS) is introduced to
incorporate multimodal information processing
modules into our context-aware research paradigm
and has the capability of archiving the most
significant information selectively in real-time.
2.1 Research Platform
Figure 1: Meeting room settings.
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
32
Multiple sensors are installed in the meeting room so
as to acquire the overall information about the
environment, as is illustrated in Figure 1. Three
fixed cameras are set to extract video frames from
distinct perspectives. In this paper, visual processing
and context reasoning is constrained on the video
sequences acquired with the 3 fixed cameras.
In our research experiments, the problem is
simplified by restricting the meeting participant
number to be 4. Three typical sorts of meeting
scenarios are taken into account in this paper: speech,
discussion, and break, as described in Table 1 below.
Table 1: Three meeting scenarios.
Scenario Features
Speech One participant gives speech at the
projector screen, the other three seated.
Discussion Four participants seated and talk.
Break Participants leave the seats and perform
random actions.
On-the-Spot Archiving system is designed to
analyze individual and group events in the meeting
room, and archive the multimodal information
appropriately based on the online analysis results of
meetings. Archived multimodal information can be
retrieved and browsed by users later. The prototype
of our system is illustrated in Figure 2.
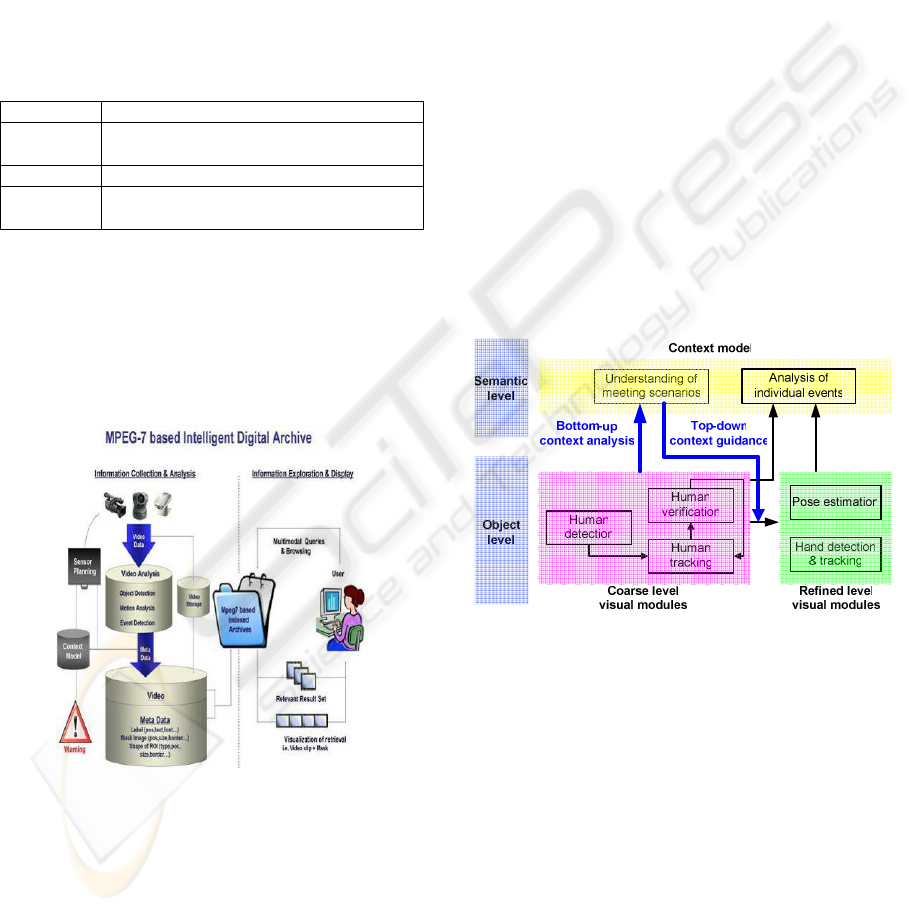
Figure 2: Prototype of on-the-spot archiving system.
Visual processing in a human-centered smart
environment can be classified into two major
categories: (1) coarse level visual modules, i.e.
detection and tracking of head and body blobs; (2)
refined level visual modules, including detection and
tracking of hand blobs, head pose estimation etc.
The objective of our system is to record the most
relevant information according to dynamic context.
For instance, before the meeting begins or during
meeting breaks, only the coarse level information
processing modules are required. While during
speech or group discussion, refined level visual
processing is required so that we can analyze the
participants’ actions and focus of attention.
2.2 Context-Aware Visual Processing
All participants need to be analyzed via visual
processing techniques so as to recognize individual
and group events. While at the same time, analysis
of individual activities and group events in different
meeting scenarios might demand distinct visual
cues.
Thus a novel framework is proposed to solve this
issue, which proceeds the context-aware visual
mechanism in a loop way. Firstly, coarse level
human blobs are detected and verified so as to
understand current meeting scenarios in a bottom-up
mode; then in a top-down fashion, current meeting
context model helps control the selective processing
of refined level blob information, as is illustrated in
Figure 3.
Figure 3: Context-aware vision system flowchart.
3 HUMAN DETECTION AND
TRACKING
Human detection and tracking generates coarse
information for the bottom-up context analysis,
which is a significant starting point for context-
aware vision systems.
In this paper a two-stage approach is presented to
detect and track potential human objects within
meeting scenarios. The entire procedure can be
divided into two stages: hypothesis generation and
human object verification, which are to be described
in details respectively below.
DYNAMIC CONTEXT DRIVEN HUMAN DETECTION AND TRACKING IN MEETING SCENARIOS
33

3.1 Hypothesis Generation
Multiple cues are combined to generate hypothesis
for potential human objects in the meeting room
environment. Motion information is used firstly for
foreground object extraction. Color and gradient
information is further employed to determine
potential head objects. Once the head candidates
determined, body blobs are generated according to
somatological knowledge.
Motion detection or foreground extraction is the
first step of our human detection approach, since
motion is a significant clue of human presence, and
by foreground extraction we can immensely reduce
the search range for further human detection
modules. In this paper, a behavior analysis oriented
consistent foreground detection method (Jiang et al.,
2006) is employed to generate moving objects in
indoor environment. Unlike traditional Gaussian
mixture model (GMM) based methods, this
algorithm maintains two background models, the
original background and the run-time background,
based on which foreground and background pixels
are separated effectively. Figure 4 shows the result
of our method compared to traditional GMM results.
Figure 4: Comparison of GMM based foreground
detection and the adopted method here.
Connected component analysis is performed on
the detected foreground pixels, which generates a set
of foreground objects. Based on these detected
objects, color and gradient cues are further
processed so as to determine potential head location.
Skin detection is performed in the upper half part
of the foreground objects. Skin color model
λ
is
based on HSV color space, and skin and non-skin
pixels are classified according to the distribution of
hue and saturation, as is expressed in Formula 1.
(,) (,) (,)
(|)(|)(|)
xy xy xy
pI ph ps
λλλ
=
(1)
As a complementary cue of skin color
information, object gradient information is also used
to determine exact boundaries of human heads. In a
neighbor region of skin areas, a set of ellipses
[,, ,]
i
iiii
X
xywh=
(1,,)
i
N= … are generated based
on changing locations
(, )
i
i
x
y and changing sizes
(,)
i
i
w
h within a certain range. Potential head
candidate is determined according to the observation
probabilities:
argmax ( | )
i
edge
i
X
X
py X=
(2)
Figure 5 shows the result of head candidates
generation by skin detection and elliptical fitting.
Body blobs are further determined based on motion
detection results and somatological knowledge
concerning the relationship between head and body.
Figure 5: Results of head candidates generation.
3.2 Tracking and Verification
Detected candidate head ellipsis and body rectangles
are tracked by particle filtering techniques. Elliptical
head state vector is defined as
[,, ,]
fffff
X
xywh= ,
where
(,)
ff
x
y ,
f
w
and
f
h
denote the center and two
axes of the head ellipse respectively.
Rectangular body
state vector is defined as
[,, ,]
b
bbbb
X
xywh= , where
(, )
b
b
x
y ,
b
w
and
b
h
denote the center, width and height
of the body rectangle respectively. Either for head or
body tracking, a set of samples
() ()
1
{, }
i
iN
t
ti
x
π
=
are
maintained and updated, and the mean state of the
sample set can be adopted as the estimated state of
the current object.
Traditional particle filter methods cannot deal
with long-term tracking applications effectively due
to their lack of appropriate adjustment mechanism.
Therefore we propose a revised particle filter
tracking algorithm so as to reduce the potential
tracking failures. Once the tracking samples drift
away from the object for a certain threshold
η
, head
and body detection results are adopted for a self
adjustment of the sample set. Those detected head or
body blobs overlapping with currently maintained
samples are used for the re-initialization of the
sample set. Details of our self-adjusted particle filter
tracking algorithm is given in Table 2 below.
Through the previous tracking approach, a set of
hypothesized human objects are generated and
updated, based on which an efficient AdaBoost face
detector (Wang et al., 2006) is adopted to verify
those objects in video streams.
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
34
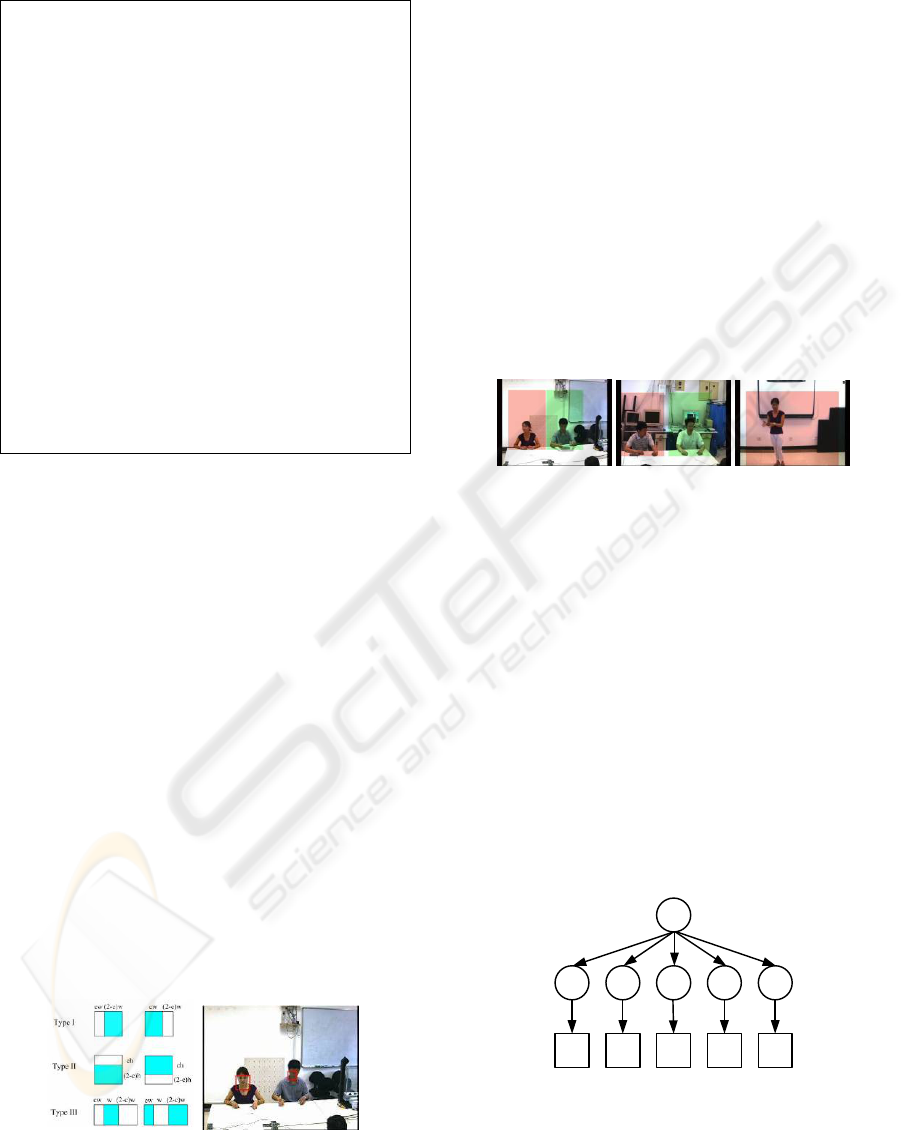
Table 2: Self-adjusted PF tracking algorithm.
With the particle set
() ()
111
{, }
i
iN
t
ti
x
π
−−=
at the previous
time step, proceed as follows at time t:
Step 1: Resampling. Resample
() ()
11
{, }
i
i
tt
x
π
−−
to get
() ()
11
{' , ' }
ii
tt
x
π
−−
based on probability
()
1
i
t
π
−
Step 2: Prediction. Propagate each sample
()
1
i
t
x
−
by a
linear dynamic model
() () ()
11
'
i
ii
t
tt
x
Ax w
−−
=+, where
()
1
i
t
w
−
is a Gaussian random variable
Step 3: Observation. For each sample
()
i
t
x
, calculate
its weight according to color and edge cues:
() () ()
(|)(|)
i
color i edge i
ttttt
p
yxpyx
π
=
Step 4: Estimation. Estimate the mean state of the
set
() ()
1
{, }
i
iN
t
ti
x
π
=
by
() () ()
1
[]
N
i
ii
t
tt
i
E
xx
π
=
=
∑
Step 5: Adjustment. If the highest weight of the
sample set
()
max
i
t
πη
< , adjust head or body object
based on detection results and restart the sampling
procedure
AdaBoost face detectors integrate a set of weak
classifiers and group them in a pyramid structure to
generate a strong classifier. The selection of features
and weights is learned through training procedure.
11
1, ( ) ( ) / 2
()
0,
NN
ii i
ii
if h x
Hx
otherwise
αα
==
⎧
≥
⎪
=
⎨
⎪
⎩
∑∑
(3)
Besides traditional symmetric rectangle features,
asymmetric rectangle features are also adopted in the
AdaBoost learning algorithm so as to detect multi-
view faces, as is illustrated in the left part of Figure
6. Asymmetric rectangle features can interpret
asymmetric gray distribution in profile face image.
In this paper, an appropriate sub-window is
generated within the neighbour area of tracked head
ellipse. AdaBoost face detector is employed to
search face rectangles in this sub-window. Once the
face detected, the target object is certified to be valid.
As a result of the object layer, input image
sequences are converted into sequences of human
objects, which are adopted for the following context
analysis tasks.
Figure 6: Multi-view AdaBoost face detector (Left:
Rectangle feature set of our approach; Right: Face
detection result).
4 ANALYSIS OF DYNAMIC
CONTEXT
Context analysis is performed on-line in our On-the-
Spot Archiving System and applied as the guidance
of refined visual modules, which is the most
prominent feature between our framework and most
previous related work.
In this paper, the concept of dynamic context lies
in the changing of meeting scenarios. Thus context
analysis here is confined to the recognition of
meeting scenarios based on the extracted visual
cues. According to the meeting room settings
introduced previously, five interest areas are defined
in the three camera views, as is illustrated in Figure
7. Human presence and their standing-sitting states
in these five areas are adopted as inferring cues.
Figure 7: Interest areas in meeting environment.
Bayesian Network is implemented to estimate
human presence status in the five interest areas and
meeting scenario at each time step. The observations
of human objects in the five interest areas
are treated
as observation nodes
15
,,
O
O of the Bayesian
Network. Bayesian Network estimates human
presence states
15
,,
SS
in the five interest areas
from the given observation and further infer meeting
scenario
m
S
from these individual states:
151 5
a
rg max ( , , , | , ,
)
mm
j
S
PS jS S O O==
(4)
Those individual and group
states in BN are
defined in discrete values as follows
:
{nobody, standing, sitting}
i
S =
(1,,5)
i = …
{speech, discussion, break}
m
S =
(5)
S
m
S
3
S
4
S
5
S
2
S
1
O
1
O
2
O
3
O
4
O
5
Figure 8: Bayesian Network structure for meeting scenario
understanding.
Figure 8 illustrates the basic structure of the
Bayesian network.
m
S
is the final output of the
context analysis, which classified current meeting
DYNAMIC CONTEXT DRIVEN HUMAN DETECTION AND TRACKING IN MEETING SCENARIOS
35
context into three scenarios: speech, discussion and
meeting break. As a result of the context analysis
layer, meeting video sequences are converted into a
sequential outline of meeting scenarios.
Current work contains no temporal information
within our reasoning framework, Dynamic Bayesian
Network is considered to be adopted in future work.
5 CONTEXT-DRIVEN REFINED
VISUAL PROCESSING
In some specific meeting scenarios such as speech
and discussion, detection, tracking and analysis of
detailed blobs are required so as to provide more
refined cues for further analysis of individual events.
5.1 Context-Aware Visual Processing
As we can see, video sequences before, in-between
or after a complete meeting are all categorized into
meeting break scenarios. During meeting breaks, no
significant information is generated or propagated
about the meeting contents, therefore there is no
need for refined level visual processing.
On the contrary, those meaningful individual and
interactive events generated during speech or
discussion scenarios contain the majority of meeting
information, hence refined level visual modules such
as head pose estimation and hand tracking are
required for the further analysis of human activities
and interactions.
As is described in Table 3, head pose estimation
is applied to help analyze participants’ focus of
attention and their concentration level toward the
meeting. Hand detection and tracking module can be
used for the recognition of specific human actions
such as raising hands and pointing directions.
Table 3: Detailed-level visual processing for specific
meeting scenarios.
Visual
module
Scenario Objective
Pose
estimation
Speech,
discussion
Analyze focus of
attention.
Hand
tracking
Speech Analyze hand actions
such as raising hand,
pointing and speech
related actions.
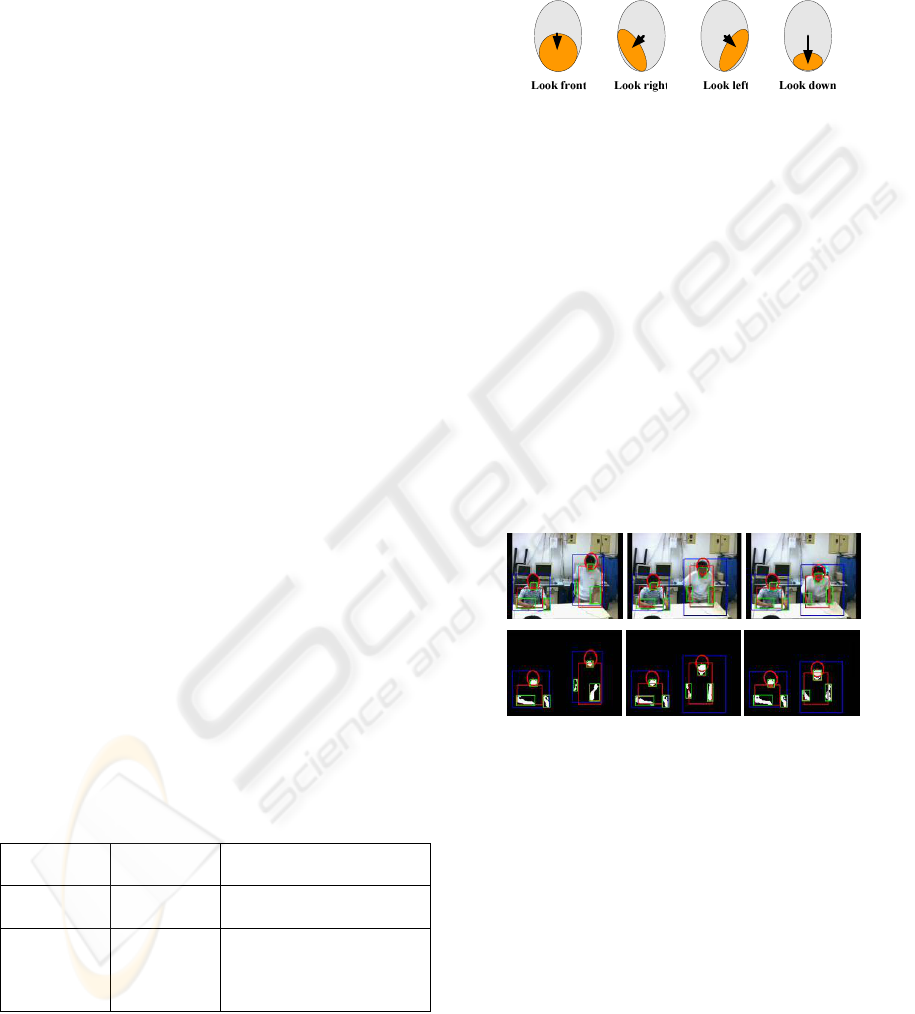
5.2 Head Pose Estimation
A Bayesian estimation method (Park, 2004) can be
further employed to recognize participants’ head
poses rough.
Figure 9: Head pose estimation.
Denote the state of head pose in the current
image with
X
. Two types of rough observations are
selected as reasoning cues, let
a
Y
be the angle of
vector from head center to face center,
r
Y
be the
ratio of face area to head area, as is described in
Figure 9. Pose estimation task is equivalent to
estimate the maximum belief
:
(|,) (|)(|)
ar a r
P
XYY PY XPY X∝
(6)
5.3 Hand Detection and Tracking
Use the same skin color detection technique and
connected component analysis algorithm as in
Section 3, hand blobs can be segmented
successfully.
Figure 10: Hand detection and tracking.
Tracking of hand blobs appeals to color based
Mean-Shift algorithm. We apply skin color model
introduced in Section 3 to the human body areas and
generate probability maps, based on which a Mean-
Shift algorithm is carried out to track hand
rectangles. Selected samples of hand detection and
tracking in our system are presented in Figure 10.
The output of hand detection and tracking is a
trajectory of hand blobs, which can be used as input
for the recognition of more individual events, such
as raising hand for QA and object-targeted pointing.
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
36
6 EXPERIMENTS
We apply the proposed approach to detect and track
human in our meeting room environment. Figure 11
shows the visual processing results performed with
each of the three camera views during a meeting.
Figure 11: Visual processing and human object detection
results (1
st
row: original images; 2
nd
row: foreground
detection; 3
rd
row: skin detection; 4
th
row: Edge detection).
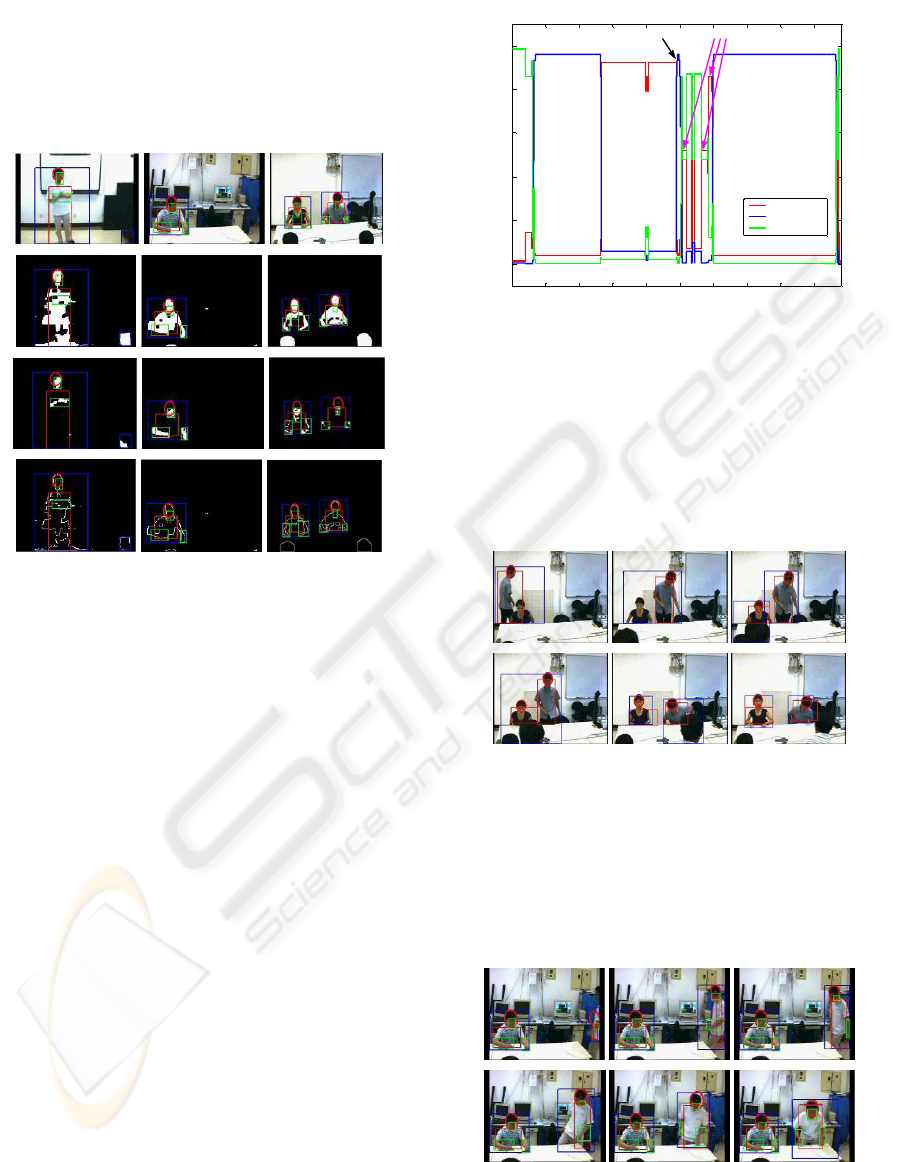
Our approach has been demonstrated with real
data extracted in our meeting room. Figure 12 shows
the result of context analysis from one of the
meeting samples. Meeting scenario recognition rate
is 95.4%. Most of the false alarms come from those
false detected ‘speech’ scenarios. For instance, three
pink marked sections expressed in Figure 12 are
typical false detected samples. Such types of errors
are generated due to insufficiency of our context
analysis model. In our current model, such meeting
scenes with one person standing or walking at the
projector screen and the other three seated around
the table are regarded as ‘speech’ scenarios.
However, sometimes such kind of scenes might also
happen during meeting breaks. Recognition rate can
be improved by incorporating more cues and
modifying context analysis model in the future.
0 2000 4000 6000 8000 10000 12000 14000 16000 18000
0
0.2
0.4
0.6
0.8
1
Frames (n)
Scenario probability
Speech
Discussion
Break
Break
Discussion Speech
Discussion
Break
Speech
Discussion
Break
(False detected)
Figure 12: Context analysis result.
Figure 13 gives human tracking results before
the meeting starts. As we can see, only coarse level
head and body blobs are tracked during this period.
Initially only one person is detected since two
persons are detected as one foreground object. Once
the two separated and are detected as foreground
objects respectively, the other one is detected.
Figure 13: Tracking results before starting of the meeting,
in which head pose estimation and hand tracking are not
performed.
Experimental results shown in Figure 14
demonstrate the effectiveness of our approach in
human verification while the presenter walks back to
his seat. The initially false detected head blob is
eliminated through verification procedure.
Figure 14: Human verification and tracking results while
the presenter is walking back to his seat and sitting down.
DYNAMIC CONTEXT DRIVEN HUMAN DETECTION AND TRACKING IN MEETING SCENARIOS
37

Figure 15 and 16 indicate the effectiveness of our
context-aware visual processing approach. During
the speech scenarios, both the coarse level blobs and
the refined level blobs are tracked. Figure 15 shows
the tracking results of the participant’s raising hand
process, and the speaker is tracked stably for a long
time span in Figure 16.
Figure 15: Tracking results while the participant is raising
his right hand.
Figure 16: Tracking results of the presenter.
However, our tracking algorithm might generate
errors when two participants walk across each other
and one of the heads is occluded for a short period.
Cooperative reasoning structure is considered to
improve our approach in future work.
7 CONCLUSIONS
In this paper, a bottom-up and top-down integrated
visual framework is proposed for human-centered
processing in dynamic context. Coarse level visual
cues are extracted concerning human presence and
states in meeting scenarios, based on which context
analysis is performed through Bayesian reasoning
approach. Context information is then applied to
control refined visual modules in a top-down style.
Besides, a novel hypothesis-verification method is
adopted for robust detection and long-term stable
tracking of human objects. Experimental results
have validated our approach. Spatial-temporal
analysis of hierarchical context model is considered
for the future extension of our work.
ACKNOWLEDGEMENTS
The work described in this paper is supported by
CNSF grant 60673189 and CNSF grant 60433030.
REFERENCES
McCowan, I., Perez, D., Bengio, S., Lathoud, G., Barnard,
M., Zhang, D., 2005. Automatic Analysis of
Multimodal Group Actions in Meetings. In IEEE
Trans. on Pattern Analysis and Machine Intelligence
(PAMI’05), Vol. 27, No. 3.
Zhang, D., Perez, D., Bengio, S., McCowan, I., 2006.
Modeling individual and group actions in meetings
with layered HMMs. In IEEE Trans. on Multimedia,
Vol. 8, No. 3.
Waibel, A., Schultz, T., Bett, M., Denecke, Malkin, R.,
Rogina, I., Stiefelhagen, R., Yang, J., 2003. SMaRT:
The Smart Meeting Room Task at ISL. In Proc. IEEE
Intl. Conf. on Acoustics, Speech, and Signal
Processing 2003 (ICASSP'03), Vol. 4: 752–755.
Stiefelhagen, R., Yang, J., Waibel, A., 2002. Modeling
Focus of Attention for Meeting Indexing Based on
Multiple Cues. In IEEE Trans. on Neural Networks,
Vol. 13, No. 4.
Trivedi, M., Huang, K., Mikic, I., 2005. Dynamic Context
Capture and Distributed Video Arrays for Intelligent
Spaces. In IEEE Trans. on Systems, Man, and
Cybernetics—PART A: Systems and Humans, Vol. 35,
No. 1.
Hakeem, A., Shah, M., 2004. Ontology and taxonomy
collaborated framework for meeting classification. In
Proc. 17th Intl. Conf. on Pattern Recognition 2004
(ICPR'04), Vol. 4: 219-222.
Hames, M., Rigoll, G., 2005. A Multi-Modal Graphical
Model for Robust Recognition of Group Actions in
Meetings from Disturbed Videos. In Proc. IEEE Intl.
Conf. on Image Processing 2005 (ICIP'05).
Song, X., Nevatia, R., 2004. Combined face-body tracking
in indoor environment. In Proc. 17th Intl. Conf. on
Pattern Recognition 2004 (ICPR'04), Vol. 4: 159-162.
Wang, Y., Liu, Y., Tao, L., Xu, G., 2006. Real-Time
Multi-View Face Detection and Pose Estimation in
Video Stream. In Proc. 18th Intl. Conf. on Pattern
Recognition (ICPR'06), Vol. 4: 354-357.
Jiang, L., Zhang, X., Tao, L., Xu, G., 2006. Behavior
Analysis Oriented Consistent Foreground Object
Detection. In Proc. 2rd Chinese Conf. on Harmonious
Human Machine Environment 2006 (HHME'06).
Park, S., 2004. A Hierarchical Graphical Model for
Recognizing Human Actions and Interactions in Video.
PhD Thesis.
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
38
