
CONTROLLING A VIRTUAL BODY BY THOUGHT IN A
HIGHLY-IMMERSIVE VIRTUAL ENVIRONMENT
A Case Study in Using a Brain-Computer Interface in a Virtual-Reality Cave-like
System
Doron Friedman
VECG Lab, Dept. of CS, University College London, UK
Robert Leeb
Laboratory of Brain-Computer Interfaces, Institute for Knowledge Discovery, Graz University of Technology, Graz, Austria
Larisa Dikovsky, Miriam Reiner
Department of Ed. In Technology and Science, Technion Touch-lab, Technion, Israel Institute of Technology, Haifa, Israel
Gert Pfurtscheller
Laboratory of Brain-Computer Interfaces, Institute for Knowledge Discovery, Graz University of Technology, Graz, Austria
Mel Slater
ICREA-Universitat Politecnica de Catalunya, Departament de LSI Barcelona, Spain
and Department of Computer Science, UCL
Keywords:
Brain-computer interface, virtual reality, Cave, avatar, advanced user interfaces.
Abstract:
A brain-computer interface (BCI) can arguably be considered the ultimate user interface, where humans op-
erate a computer using thought alone. We have integrated the Anon-BCI into a highly immersive Cave-like
system. In this paper we report a case study where three participants were able to control their avatar using
only their thought. We have analyzed the participants’ subjective experience using an in-depth qualitative
methodology. We also discuss some limitations of BCI in controlling a virtual environment, and interaction
design decisions that needed to be made.
1 INTRODUCTION
Brain-computer interface (BCI) has been studied ex-
tensively as a tool for paralyzed patients, which may
augment their communication with the external world
and allow them better control of their limbs. However,
once it has been developed for these critical applica-
tions, we expect it will have profound implications on
many other types of user interfaces and applications.
BCI could be one of the most significant steps fol-
lowing “direct manipulation interfaces” (Schneider-
man, 1983) – where intention is mapped directly into
interaction, rather than being conveyed through mo-
tor movements. Furthermore, if used in an immer-
sive virtual environment (IVE) this could be a com-
pletely novel experience and, in the future, lead to
unprecedented levels in the sense of presence (for re-
cent reviews of the concept of presence see (Vives and
Slater, 2005) and (Riva et al., 2003)).
A key requirement for a successful experience in
an immersive virtual environment (IVE) is the rep-
resentation of the participant, or its avatar (Pandzic
et al., 1997; Slater et al., 1994; Slater et al., 1998).
This paper describes the first ever study where par-
ticipants control their own avatar using only their
thoughts. Three subjects were able to use the anon-
BCI to control an avatar, and their subjective experi-
ence was assessed using questionnaires and a semi-
structured interview. Naturally, a third-person avatar,
such as used in this experiment, is only one possible
interface to an IVE.
Using a BCI to control an IVE by thought raises
several major human-computer interaction (HCI) is-
sues: whether classification of thought patterns is
continuous (asynchronous BCI) or only takes place in
specific moments (synchronous BCI), the number of
83
Fr iedman D., Leeb R., Dikovsky, L., Reiner M., Pfurtscheller G. and Slater M. (2007).
CONTROLLING A VIRTUAL BODY BY THOUGHT IN A HIGHLY-IMMERSIVE VIRTUAL ENVIRONMENT - A Case Study in Using a Brain-Computer
Interface in a Virtual-Reality Cave-like System.
In Proceedings of the Second International Conference on Computer Graphics Theory and Applications - AS/IE, pages 83-90
DOI: 10.5220/0002073100830090
Copyright
c
SciTePress

input classes recognized, the importance of feedback,
and the nature of the mapping between thoughts and
resulting action in the IVE. In this paper we refer to
these issues, and present a case study that specifically
addresses the issues of feedback and mapping.
A critical initial hypothesis is that natural map-
ping between thought processes and IVE function-
ality would improve the experience. A one-to-one
mapping seemingly makes intuitive sense, but hav-
ing this mapping is constraining because we are lim-
ited in the scope of thought patterns that we can
detect based on contemporary brain recording tech-
niques. In addition, it precludes other more com-
plex or more fanciful body image mappings; what
if we want to experiment with lobster avatars? (See
Jaron Lanier’s “everyone can be a lobster” statement
in http://www.edge.org/q2006/q06 7.html#lanier). In
the case study reported here we have found out that
natural mapping was reported to feel more natural and
easy than when the mapping was reversed. However,
the results do not indicate that BCI accuracy was bet-
ter with natural mapping than with reversed mapping.
The main implication of our case study is that this
new type of interface, whereby IVE participants con-
trol their avatars by thought, is possible, and should
be further pursued. In addition, we reveal new in-
sights about the HCI issues that are involved in such
an interface, and provide a first glance into what the
experience of using such an interface may be like.
2 BACKGROUND
The possibility that people may be able to control
computers by thought alone, based on real-time anal-
ysis of electroencephalogram (EEG) waves, was al-
ready conceived as early as the 1970s (Vidal, 1973).
Recently, with advances in processing power, sig-
nal analysis, and neuro-scientific understanding of the
brain, there is growing interest in BCI, and a few suc-
cess stories. Current BCI research is focussing on
developing a new communication alternative for pa-
tients with severe neuromuscular disorders, such as
amyotrophic lateral sclerosis, brainstem stroke, and
spinal cord injury (Wolpaw et al., 2002).
Previous research has established that a BCI may
be used to control events within an IVE. One thread of
research tried to evaluate BCI as an additional control
channel for future combat pilots (Nelson et al., 1997;
Middendorf et al., 2000). Bayliss et al. studied BCI
based on the P3 evoked potential (EP) in the context
of a virtual reality driving simulation and a simulation
involving operating a few devices in a virtual apart-
ment (Bayliss and Ballard, 2000; Bayliss, 2003).
This previous research into IVE and BCI was all
based on several types of visually evoked responses.
Our research is based on a different BCI paradigm
that exploits motor imagination. Such a motor imag-
ination would, for example, be thinking about mov-
ing a hand or a foot, but without actually moving
it (Pfurtscheller and Neuper, 2001).
In a previous experiment (Anonymous, ), we have
allowed subjects to navigate a virtual street using BCI
in a Cave-like (Cruz-Neira et al., 1992) system. Our
results in that previous experiment provided some ev-
idence that a highly immersive environment such as a
Cave may not only improve user motivation, but may
also facilitate BCI accuracy. This suggests that there
is a great potential in using IVEs with BCI. However,
our research has also made us aware of the many lim-
itations and design issues that come into play when
using BCI as an interface to control and IVE, which
we now consider.
The first issue is the number of different events (or
classes) distinguished in real-time, through the analy-
sis of EEG. As we add more classes, accuracy quickly
drops, and the number of EEG channels (recorded
brain areas) needs to grow, which makes the sessions
more complex and time consuming. Another limi-
tation is that BCI is often synchronous, or trigger-
based, i.e., the classification is not applied continu-
ously, but only in specific time windows following an
external cue, such as a short sound after which partic-
ipants are required to have the appropriate thoughts.
Asynchronous BCI is possible, but accuracy is com-
promised (Millan and Mourino, 2003).
Wolpaw et al. highlight the importance of feed-
back for BCI (Wolpaw et al., 2002). In order to be
effective, the feedback needs to be immediate. How-
ever, providing continuous and immediate feedback
causes a problem. If we look at the accuracy of clas-
sification over time, we see that there is typically a
delay of 1-3 seconds between the onset of the trigger
and the optimal classification. The typical approach,
which we also adopt here, is to provide immediate,
continuous feedback, for the whole classification du-
ration (approximately four seconds), even though we
know the classification is rarely correct throughout
this whole duration. Figure 1 shows the data from a
typical training run: in this case the classification rate
reaches an optimum 2-3 seconds after the trigger, and
then drops again.
A natural question is whether a more direct map-
ping between the type of thought required to initiate
an action and the feedback from that thought would
improve BCI performance, and how this mapping
would be experienced by the participants.
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
84

0 1 2 3 4 5 6 7
8
0
10
20
30
40
50
60
70
t[sec]
Classification Error [%]
both
foot (1)
right (2)
Figure 1: Classification error over time, averaged over 40
triggers in one run. A cross is displayed from time 0, and an
arrow cue is given at second 3 for a duration of 1.25 second,
which indicated to the subject what they should “think”.
3 METHOD
We have opted to use a basic anon-BCI paradigm,
which is binary and synchronous. This entails limited
information throughput, but increases subjects’ BCI
success rate, which is thus appropriate for a first-of-
its-kind research.
3.1 Subjects and Training
Eleven subjects went through “traditional” (2D,
monitor-based) BCI training, and the top three were
selected for the actual IVE study. This is a typical
BCI screening process. It is known that a small per-
centage of population can easily adapt to the BCI and
a larger majority can reach similar accuracy levels,
but only with long periods of training (Guger et al.,
2003), thus typically 2-5 subjects are used to prove
the feasibility of a system. Since we were also inter-
ested in comparing between two conditions, we had
each subject repeat each condition four times.
Each subject first took part in a number of training
runs without feedback. In each run the subject had to
imagine a movement of both their legs or a movement
of their right hand in response to a visual cue stimu-
lus presented on a computer monitor, in the form of
an arrow pointing downwards or to the right, respec-
tively (Figure 2). In addition to the visual cue an au-
ditory cue was also given either as a single beep (hand
imagination) or as a double beep (legs imagination).
Each trial started with a fixation cross (second 0) fol-
lowed at second 3 by the cue-stimulus presented for
1.25 seconds. There was a random duration interval
of 0.5-2 seconds between the trials.
Figure 2: “Traditional” BCI in front of a monitor: the arrow
on the red cross indicates to the subject whether they should
imagine moving their hand or their feet. Subjects need to
keep concentrating on this thought as long as the cross is
displayed; for 4.25 seconds.
Forty EEG trials, twenty for every class, were
recorded in one run. The EEG trials from runs with-
out feedback were used to set up a classifier for dis-
criminating between the two different mental states.
In further runs, visual feedback in the form of a mov-
ing bar was given to inform the subject about the ac-
curacy of the classification during each imagination
task (i.e., classification of right-hand imagination was
represented by the bar moving to the right, classifica-
tion of feet movement imagination made the bar move
downward; see Figure 3). The training and feedback
runs were repeated a number of times over a period
of a few weeks, until a satisfactory classification for
the discrimination between the two motor imagina-
tion tasks was achieved. Each session, composed of a
number of runs, lasted approximately two hours.
Figure 3: “Traditional” BCI in front of a monitor: the white
bar provides immediate and continuous feedback for 4.25
seconds.
Two subjects had a high BCI success rate in their
first few runs: one had over 85% accuracy and the
other over 90% accuracy. Finding a third subject was
CONTROLLING A VIRTUAL BODY BY THOUGHT IN A HIGHLY-IMMERSIVE VIRTUAL ENVIRONMENT - A
Case Study in Using a Brain-Computer Interface in a Virtual-Reality Cave-like System
85

more difficult. After a few weeks of training, three
other subjects reached approximately 75% accuracy,
showing improvement over time, but the improve-
ment was slow.
Eventually, the study proceeded with three sub-
jects: two females and one male (aged 21,49, and 27,
respectively). All subjects were right handed, without
a history of neurological disease. Subjects gave for-
mal consent to participate in the study, and were paid
the equivalent of $12 per hour. Each session lasted 3-
4 hours, and each subject went through two sessions.
3.2 EEG Recording
Three EEG channels were recorded bipolarly (two
electrodes for each channel). Electrode were placed
2.5 cm anterior and 2.5 cm posterior to positions
C3, C4, and Cz, of the “10-20 International System”,
which is a standard for electrode placement based on
the location of the cerebral cortical regions. The EEG
was amplified between 0.5 and 30 Hz by an EEG am-
plifier (g.tec Guger Technologies, Graz, Austria) and
processed in real-time. Sampling frequency was 250
Hz.
3.3 Feature Extraction and
Classification
BCI systems apply an online classification to the EEG
signal. Two frequency bands selected from each EEG
channel served as features for the algorithm. The log-
arithmic band power was calculated in the alpha (8-
12 Hz) and beta (16-24Hz) bands over one-second
epochs. These features were classified with Fisher’s
linear discriminant analysis (LDA) and transformed
into a binary control signal.
3.4 The Virtual Environment
The study was carried out in a four-sided ReaCTor
system that is similar to a Cave (Cruz-Neira et al.,
1992), with Intersense IS900 head-tracking. The ap-
plications were implemented on top of the DIVE soft-
ware (Frecon et al., 2001; Steed et al., 2001).
The environment included two furnished virtual
rooms. The avatar was projected (using stereo dis-
play) to appear standing approximately half a meter
in front of the subject, who was sitting on a chair. The
avatars were matched for gender with the subject (see
Figure 4).
(a)
(b)
Figure 4: (a) A female subject and her avatar in the virtual
room. The subject is connected to the BCI equipment, in-
side the Cave-like system. (b) A male subject with the male
avatar, in the same setting.
3.5 Experimental Conditions
The visual feedback was different in two conditions.
In the first condition, which we call the normal condi-
tion, the mapping between the thought pattern and re-
sult in the IVE was intuitive: when the subjects imag-
ined moving their right arm the avatar would wave
its right arm, and when they imagined moving their
legs the avatar would start walking forward slowly.
In the second condition the mapping was reversed:
when the subjects imagined moving their right arm
the avatar would start walking, and when the subjects
imagined moving their legs the avatar would wave its
arm. The feedback was continuous for the same du-
ration as in the monitor-based BCI training (4.25 sec-
onds). In both conditions, the audio triggers were the
same as in the training phase: single beep indicated
that the subjects need to think about their arm, and a
double beep indicated they need to think about their
legs.
4 RESULTS
4.1 BCI Accuracy
Each subject carried out four runs of both conditions,
thus eight runs in total. Each run included 40 trigger
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
86
events, and each trigger was followed by 80 classifica-
tion results, one every approximately 50 milliseconds.
Thus, the data include 8 runs per subject, and each run
includes 3200 trials. BCI accuracy is determined by
the percentage of successful trials.
In order to test the significance of the results we
carried out the equivalent of two-way analysis of vari-
ance, using the number of successes out of the 12800
trials in each of the conditions. In this analysis the
response variable is therefore taken as a binomial dis-
tribution (rather than Gaussian) and it is a standard
application of logistic regression. The results show
that there were highly significant differences between
the three subjects (at a significance level that is too
small to be quoted). Subject M1 had the highest suc-
cess rate (94%), subject F1 had the next highest (86%)
and subject F2 the lowest (81%) – and these are in
keeping with what is typically found in BCI experi-
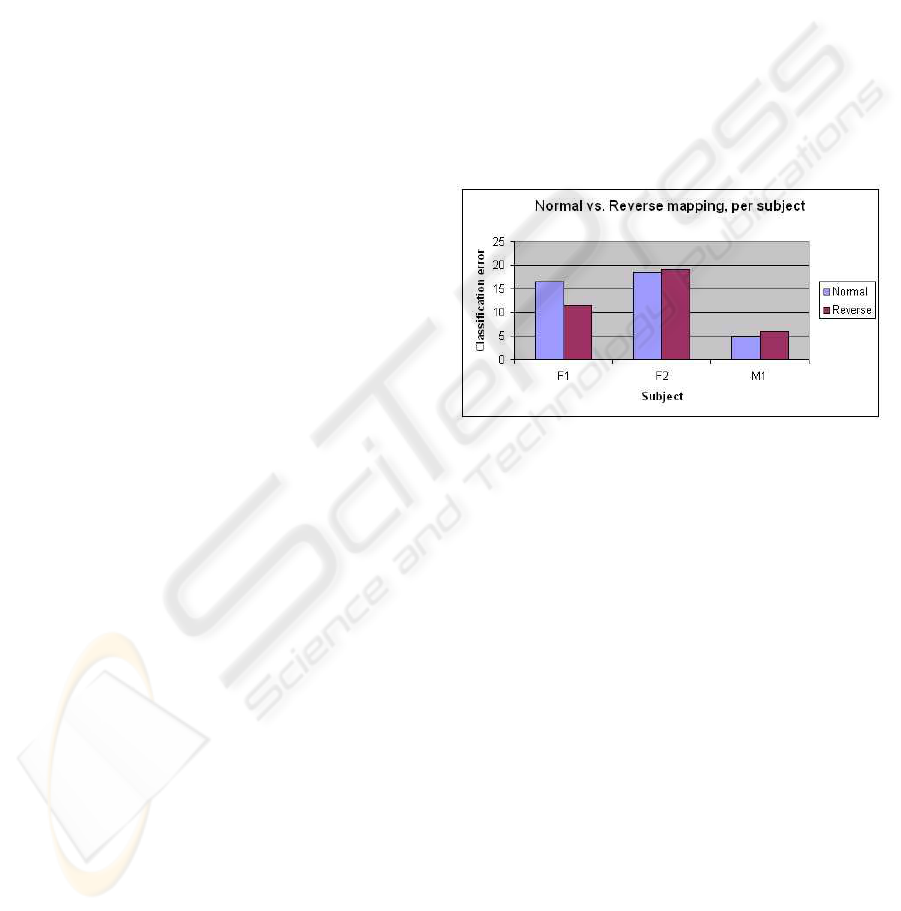
ments. The raw figures show that in the normal con-
dition the success rate was 86.7% and in the reverse
condition 87.7% and with n = 12800 per condition
this difference is significant. However, this does not
take into account the differences between the subjects
– since the very large advantage of the reverse con-
dition for subject F1 (88% reverse compared to 84%
normal) distorts the overall result. For subject M1 the
reverse condition is significantly higher than the nor-
mal condition (z = -11.3,P = 0) for subject F2 there is
no significant difference between the reverse and nor-
mal condition (z = 1.02, P = 0.31) and for subject F1
the normal condition is significantly higher than the
reverse condition (z = 3.88, P = 1.0e-4). These are
carried out using a normal test for the difference be-
tween proportions. Thus, overall, no particular con-
clusion can be drawn one way or another about the
effectiveness of the mapping in terms of BCI perfor-
mance. Figure 5 depicts the performance of the three
subjects in the two conditions.
4.2 Qualitative Results
The control of a virtual body using thought is a com-
pletely new type of experience, and we were inter-
ested in getting some insight into the subjective ex-
periences of the subjects. We thus used a combina-
tion of questionnaires and semi-structured interviews.
The goal of the subjective questionnaires and inter-
views is exploratory. We hope to partially reconstruct
the subjective experience in order to gain insight into
this novel experience; this is a type of ideographic
study (Kelly and Main, 1978).
The subjective impressions of people, unlike their
BCI accuracy, is dependent on contingent factors such
as social background, video game exposure, etc. Be-
low we describe what the three subjects reported, but
a study with a larger number of subjects is necessary
in order to extrapolate this evidence.
After their first IVE session, each subject com-
pleted several questionnaires: the SUS presence ques-
tionnaire (Slater et al., 1994), the Trinity question-
naire for body plasticity (TABP) (Desmond et al.,
2002), and a questionnaire regarding body projec-
tion: When a person has the sensation that an ob-
ject (whether real or virtual) is experienced as part of
his/her own body, this is referred to as ’body projec-
tion’. The most famous example of this is the rubber
arm illusion (Botvinick and Cohen, 1998; Armel and
Ramachandran, 2003). In order to evaluate whether
this type of body projection was experienced by our
subjects, we have also administered a questionnaire
recently designed in our lab for that purpose.
Figure 5: BCI error levels of the three subjects in the two
experimental conditions.
The questionnaires are comprised of 7-point or 5-
point Likert-scale questions. First, all questions were
“normalized” so that all low and high rates indicate
the same trend, e.g., low presence would always cor-
respond to a low rating. Then we counted how many
extreme (very low or very high) answers each subject
provides (For 7-point questions 1 and 2 were con-
sidered low and 6 and 7 were considered high, and
for 5-point questions only 1 and 5 were considered
extreme). By subtracting the number of high scores
from the number of low scores, we can classify the
result of that questionnaire into three categories: low,
high, or neutral. Our three subjects showed consis-
tency in their answers – there was no case where there
were both high and low scores for the same question-
naire. Table 1 summarizes the results, which were
also used to complement the interviews in gaining an
insight into the subject’s experience.
After completing the questionnaires, the subjects
went through a semi-structured interview. The inter-
views were audio-taped and transcribed. Such inter-
view agendas are designed in advance to identify logi-
cally ordered themes, following the recommendations
CONTROLLING A VIRTUAL BODY BY THOUGHT IN A HIGHLY-IMMERSIVE VIRTUAL ENVIRONMENT - A
Case Study in Using a Brain-Computer Interface in a Virtual-Reality Cave-like System
87

Table 1: Summary of questionnaire results. Result in each
category can be either high (+), low (-), or average (0).
Subject Plasticity Body projection Presence
F1 + + 0
M1 - - -
F2 - 0 +
of (Smith, 1977). We asked open-ended questions,
and intervention was minimized to occasional neutral
questions to encourage the subjects to continue.
4.2.1 IVE-BCI versus “Traditional” BCI
All subjects found the IVE-based BCI to be more en-
joyable and interesting. This is obvious, but may be
important in its own right: BCI training is typically
very long and exhausting; IVE may prove useful in
significantly improving the training experience and
increase motivation.
Subjects F1 and F2 thought the IVE-based BCI
was easier (although they did not actually improve
their BCI performance). Subject F1 compared the
monitor-based BCI (which she refers to as a ‘little
line’) with the IVE experience: “I felt it was easier to
make her do things. Because something was actually
happening. Because when you’re thinking about your
feet but it’s just a little line whereas if you’re think-
ing about your feet and she moves it’s, I don’t why, it
just seemed make to more sense.” Subject M1, who
reported very low presence, mentioned the IVE was
more enjoyable.
4.2.2 Relationship with Avatar
Note that the subjects were not told that the virtual
body is intended to be their avatar, and in principle
there is no reason why people should associate this
virtual body with themselves. However, two of the
three subjects (M1 and F2) referred to the virtual body
as a puppet controlled by them, which is a typical way
to regard an avatar. The third subject (F1) even occa-
sionally referred to it in first person.
Subject F1 seemed to have the highest level of
projection of her body to the avatar. This was not
only evident from the questionnaire, but also, dur-
ing the sessions. At first, the subject referred to the
avatar as “she”, but after a few runs she started refer-
ring to it as “I”. In the questionnaires this subject re-
ported a medium level of presence, and a high degree
of body plasticity. In the interview, this subject said:
“Although I was controlling her, I wasn’t moving my
hand. and I’d know if I was moving my hand.” How-
ever, later she added: “..Oh yeah. It’s because I, my
brain, did move the hand. Towards the end I did feel
it was representing me. I always felt like it was repre-
senting me but I didn’t feel it was a part of me... It’s
difficult. When you think about moving your hands
you know whether you’re moving your hands or not.
If she was moving her hand mine wasn’t moving. So
she can’t really be a part of me. -Cause to feel the
hand moving you’d have to feel the air going past it.
But the more you were in the more comfortable you
would become with that becoming you. It would just
be a different type of you. Like a different version
of you, almost. But it will never be you... First like
another body. Most of the time.”
Subject F2 reported higher presence but lower lev-
els of body plasticity and body projection. “I couldn’t
think of her as myself. I was trying to get into her
skin, it was frustrating when I couldn’t.. when i was
successful I was becoming closer, I was becoming
her. Or she was becoming me. I’m still saying that for
me to experience my movement somehow she was a
distraction. Thinking of movement I could have done
better without her. We didn’t click...But the connec-
tion was more like a puppet master...Get rid of her.
Just let me move in the environment - that was amaz-
ing. She was the task I was supposed to do.”
Subject M1 reported low presence and low body
projection. In the interview, he said: “First I thought it
was another person standing in front of me. I thought
what the objective was. I was wondering what would
happen to this person. I didn’t feel as it being my
body but I felt I had some control of the person or
of the body standing in front of me... I would best
describe it like a puppet.”
4.2.3 Mapping of Thoughts to Avatar Motion
Note that although we consider the mapping between
thought patterns and resulting avatar action to be nat-
ural in the normal condition, the mapping is not nec-
essarily perfect. For example, subjects were not in-
structed to think of a particular leg motion, and thus
they imagined cycling or kicking, whereas the avatar,
although it moved its feet, would perform a differ-
ent action: walking. This could be confusing for the
subjects, and might even divert them from the spe-
cific thought they have been trained with. In the in-
terviews, all subjects replied that this mismatch was
not a problem, and that the feedback seemed appro-
priate. We do not know if this mismatch affects the
BCI performance.
Subjects F1 and F2 (who experienced medium and
high presence, respectively) mentioned that the fact
that they were sitting and the avatar was standing was
more problematic. F2: “I usually do not walk forward
while I am sitting down..” We, of course, anticipated
this problem. In pilot runs we tried to have the sub-
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
88

ject stand in the Cave; this proved uncomfortable and
generated too many motion artifacts in the EEG sig-
nals. We could have had the avatar sit down, but that
was not the point of the study; in our vision for a fu-
ture you project your body onto the avatar’s body, and
then the avatar can be free to operate in the VE, con-
trolled by your thought.
When asked about the difference between the two
conditions, all subjects mentioned that they had to
concentrate more in the reverse condition. This may
be an explanation as to why they sometimes per-
formed better in the reverse condition than in the nor-
mal condition. F1: “It was confusing, but I didn’t
find it difficult.” F2: “I’m not sure if seeing the feed-
back was so confusing – just adding all these layers.
It made it difficult to concentrate.” M1 reported very
low presence, yet mentioned: “I was surprised that
when it was reversed I found it harder to concentrate.
It made me confused. At all times, not only in the
beginning. So there must have been something on an-
other level – I must have been influenced.”
5 CONCLUSION
We have devised a system that allows people to be
able to control a virtual body in an IVE, with accuracy
ranging from 72% to 96%. We consider this to be a
proof of the feasibility of this innovative interface. We
have used qualitative methods to get a sense of this
new type of experience: what did it feel like? what
was the nature of the relationship between the subjects
and their avatars?
There is growing interest in the BCI community
to use IVE, and some evidence that IVE may assist
in BCI training, or even improve BCI performance.
Our finding suggests that BCI in IVE is more enjoy-
able than traditional BCI, and subjects find it more in-
tuitive and natural. However, subjects did not seem
to perform better when the mapping between their
thoughts and the feedback was natural, as compared
to when this mapping was reversed. This is despite the
fact that the subjects did report that the reverse con-
dition seemed more confusing and less intuitive. The
results we describe in this paper thus indicate that the
story is complex and justify further research.
In 1965 Sutherland described the Ultimate Dis-
play system – which was the forebear of today’s
highly immersive virtual reality systems (Sutherland,
1965). In this paper we are pointing the way towards
the Ultimate Human-Computer Interface, an interface
through thought - as has been described in novels by
authors such as William Gibson (Gibson, 1984) and
Neal Stephenson (Stephenson, 1991). The research
described in this paper has shown that it is possible
to control a virtual body by thought, and has explored
performance-related results and the subjective experi-
ence that this entails. In future work we plan to take
this paradigm further, by trying to achieve a higher
level of body projection from participants to their
avatars, and by allowing the participants to achieve
a larger variety of tasks through their avatars, which
they control by thought. We hope this could be a first
step towards an ultimate future interface.
ACKNOWLEDGEMENTS
This work has been supported by the European Union
FET projects PRESENCIA, IST-2001-37927, and
PRESENCCIA, IST-2006-27731. We would like to
thank Marco Gillies and his support with the charac-
ter animation. We are also grateful to David Swapp
and other members of the VECG lab in UCL for their
support.
REFERENCES
Armel, K. C. and Ramachandran, V. S. (2003). Project-
ing sensations to external objects: Evidence from skin
conductance response. Proc R Soc Lond B Biol Sci,
270:1499–1506.
Bayliss, J. D. (2003). Use of the evoked potential P3 com-
ponent for control in a virtual apartment. IEEE Trans.
Rehabil. Eng., 11(2):113–116.
Bayliss, J. D. and Ballard, D. H. (2000). A virtual reality
testbed for Brain Computer Interface research. IEEE
Trans. Rehabil. Eng., 8(2):188–190.
Botvinick, M. and Cohen, J. (1998). Rubber hands ’feel’
touch that eyes see. Nature, 391(6669):756.
Cruz-Neira, C., Sandin, D. J., DeFanti, T. A., Kenyon, R. V.,
and Hart, J. C. (1992). The CAVE: Audio visual ex-
perience automatic virtual environment. Comm. ACM,
35(6):65–72.
Desmond, D., Horgan, O., and MacLachlan, M. (2002).
Trinity Assessment of Body Plasticity (TABP). Depart-
ment of Psychology, Trinity College, Dublin.
Frecon, E., Smith, G., Steed, A., Stenius, M., and Stahl,
O. (2001). An overview of the COVEN platform.
Presence: Teleoperators and Virtual Environments,
10(1):109–127.
Friedman, D., Leeb, R., Guger, C., Steed, A., Pfertscheller,
G., and Slater, M. (2006). Navigating virtual reality by
thought: What is it like? to appear in: Teleoperators
and virtual environments.
Gibson, W. (1984). Neuromancer. Voyager.
Guger, C., Edlinger, G., Harkam, W., Niedermayer, I.,
and Pfurtscheller, G. (2003). How many people are
CONTROLLING A VIRTUAL BODY BY THOUGHT IN A HIGHLY-IMMERSIVE VIRTUAL ENVIRONMENT - A
Case Study in Using a Brain-Computer Interface in a Virtual-Reality Cave-like System
89

able to operate an EEG-based brain-computer inter-
face (BCI)? IEEE Trans. Neural Syst. Rehabil. Eng.,
11:145–147.
Kelly, F. D. and Main, F. O. (1978). Ideographic research in
individual psychology: Problems and solutions. The
Journal of Individual Psychology, 34(2).
Middendorf, M., McMillan, G., Calhoun, G., and Jones,
K. S. (2000). Brain-Computer Interface based on the
steady-state visual-evoked response. IEEE Trans. Re-
habil. Eng., 8(2):211–214.
Millan, J. D. R. and Mourino, J. (2003). Asynchronous BCI
and local neural classifiers: An overview of the adap-
tive brain interface project. IEEE Trans. Neural Syst.
Rehabil. Eng., 11:159–161.
Nelson, W., Hettinger, L., Cunningham, J., and Roe, M.
(1997). Navigating through virtual flight environ-
ments using brain-body-actuated control. In Proc.
IEEE Virtual Reality Annual Intl Symp., pages 30–37.
Pandzic, I. S., Thalmann, N. M., Capin, T. K., and Thal-
mann, D. (1997). Virtual life network: A body-
centered networked virtual environment. Presence-
Teleoperators and Virtual Environments, 6:676–686.
Pfurtscheller, G. and Neuper, C. (2001). Motor imagery
and direct brain computer communication. Proc. of
the IEEE, 89(7):1123–1134.
Riva, G., Davide, F., and IJsselsteijn, W., editors (2003).
Being There: Concepts, effects and measurement of
user presence in synthetic environments. Ios Press.
Schneiderman, B. (1983). Direct manipulation: A step
beyond programming languages. IEEE Computer,
16(8):57–69.
Slater, M., Steed, A., McCarthy, J., and Maringelli, F.
(1998). The influence of body movement on subjec-
tive presence in virtual environments. Human Factors,
40:469–477.
Slater, M., Usoh, M., and Steed, A. (1994). Depth of pres-
ence in virtual environments. Presence: Teleoperators
and Virtual Environments, 11(3):130–144.
Smith, J. (1977). Semi-structured interviewing and qualita-
tive analysis. In Smith, J., Harre, R., and Langenhove,
L., editors, Rethinking Methods in Psychology, pages
9–26. Sage Publications, London.
Steed, A., Mortensen, J., and Frecon, E. (2001). Spelunk-
ing: Experiences using the DIVE system on CAVE-
like platforms. In Immersive Projection Technologies
and Virtual Environments, volume 2, pages 153–164.
Springer-Verlag/Wien.
Stephenson, N. (1991). Snowcrash. ROC Publishing.
Sutherland, I. (1965). The ultimate display. In Proc. IFIPS
Congress 1965, volume 2, pages 506–508.
Vidal, J. J. (1973). Toward direct brain-computer commu-
nication. Annual Review of Biophysics and Bioengi-
neering, 2:157–180.
Vives, M. S. and Slater, M. (2005). From presence to con-
sciousness through virtual reality. Nature Reviews
Neuroscience, 6(4):332–339.
Wolpaw, J. R., Birbaumer, N., McFarland, D. J.,
Pfurtscheller, G., and Vaughan, T. M. (2002). Brain
Computer Interfaces for communication an d control.
Clin. Neurophysiol., 113(6):767–791.
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
90
