
REAL-TIME RENDERING OF TIME-VARYING VOLUME DATA
USING A SINGLE COTS COMPUTER
Daisuke Nagayasu, Fumihiko Ino and Kenichi Hagihara
Graduate School of Information Science and Technology, Osaka University
1-3 Machikaneyama, Toyonaka, 560-8531 Osaka, Japan
Keywords:
Volume rendering, time-varying data, pipelined rendering, data compression, GPU, COTS.
Abstract:
This paper presents performance results of an out-of-core renderer, aiming at investigating the possibility
of real-time rendering of time-varying scalar volume data using a single commercial off-the-shelf (COTS)
computer. Our renderer is accelerated using software techniques such as data compression methods and thread-
based pipeline mechanisms. These techniques are efficiently implemented on a COTS computer that combines
multiple GPUs, CPUs, and storage devices using scalable link interface (SLI), multi-core, and redundant arrays
of inexpensive disks (RAID) technologies, respectively. We find that the COTS-based out-of-core renderer
achieves a video rate of 35 frames per second (fps) for 258× 258× 208 voxel data with 99 time steps. It also
demonstrates an almost interactive rate of 4 fps for 512×512× 295 voxel data with 411 time steps.
1 INTRODUCTION
Volume rendering of time-varying data plays an in-
creasingly important role for understanding complex
time-varying phenomena in a wide range of fields
such as physical science and life science. This vi-
sualization technique produces animation sequences
that show how the three-dimensional (3-D) structure
evolves over time. Therefore, real-time rendering
with interactive rates is necessary to assist scientists
effectively in time-series analysis.
Due to the higher complexity of rendering
tasks, real-time rendering systems have traditionally
been implemented using high-performance comput-
ing (HPC) infrastructures such as supercomputersand
clusters of PCs. However, recent rapid advances in
graphics processing unit (GPU) technology (Mon-
trym and Moreton, 2005) have allowed us to use a
single commercial off-the-shelf (COTS) computer for
dealing with real-time rendering of non-time-varying
volume.
With respect to time-varying volume, on the other
hand, we further require a fast I/O mechanism to
achieve full performance on the GPU, because time-
varying data usually cannot be stored entirely in the
main memory. The lack of such an I/O mechanism
will result in poor performance, because the GPU usu-
ally waits for the data for the next time step.
To address this problem, prior systems (Lum et al.,
2002; Akiba et al., 2005; Strengert et al., 2005) re-
duced data size by data compression methods and
minimized I/O time using RAID technology (Patter-
son et al., 1988). Some HPC-based systems (Chiueh
and Ma, 1997; Bethel et al., 2000; Kniss et al., 2001;
Yu and Ma, 2005) also increased the throughput by a
pipeline mechanism that overlaps I/O operations with
computation.
Thus, many researchers have tried to achieve real-
time rendering of time-varying volume. However, it
is still not clear how well each technique contributes
to the acceleration. Furthermore, to the best of our
knowledge, most of the systems are implemented on
HPC systems. The objective of our project is to clar-
ify the contribution of each technique and to provide a
low-cost solution based on a single COTS computer.
In this paper, we present performance results of an
out-of-core renderer, aiming at investigating the pos-
sibility of real-time rendering of time-varying scalar
volume data using a single COTS computer. Our
renderer is accelerated using well-known techniques
such as data compression methods and thread-based
pipeline mechanisms. These techniques are effi-
220
Nagayasu D., Ino F. and Hagihara K. (2007).
REAL-TIME RENDERING OF TIME-VARYING VOLUME DATA USING A SINGLE COTS COMPUTER.
In Proceedings of the Second International Conference on Computer Graphics Theory and Applications - GM/R, pages 220-227
DOI: 10.5220/0002076502200227
Copyright
c
SciTePress

ciently implemented on a COTS computer that com-
bines multiple GPUs, CPUs, and storage devices us-
ing scalable link interface (SLI) (nVIDIA Corpora-
tion, 2006), multi-core, and RAID technologies, re-
spectively. The key contribution of this paper is to
demonstrate that the techniques mentioned above are
necessary to achieve real-time out-of-core rendering
on a recent COTS computer.
The rest of the paper is organized as follows. Sec-
tion 2 presents a model that abstracts a COTS com-
puter. Section 3 describes our renderer with its un-
derlying acceleration techniques. Section 4 presents
performance results obtained on a COTS computer.
Section 5 concludes the paper.
2 COTS COMPUTER MODEL
We first present a COTS computer model to design an
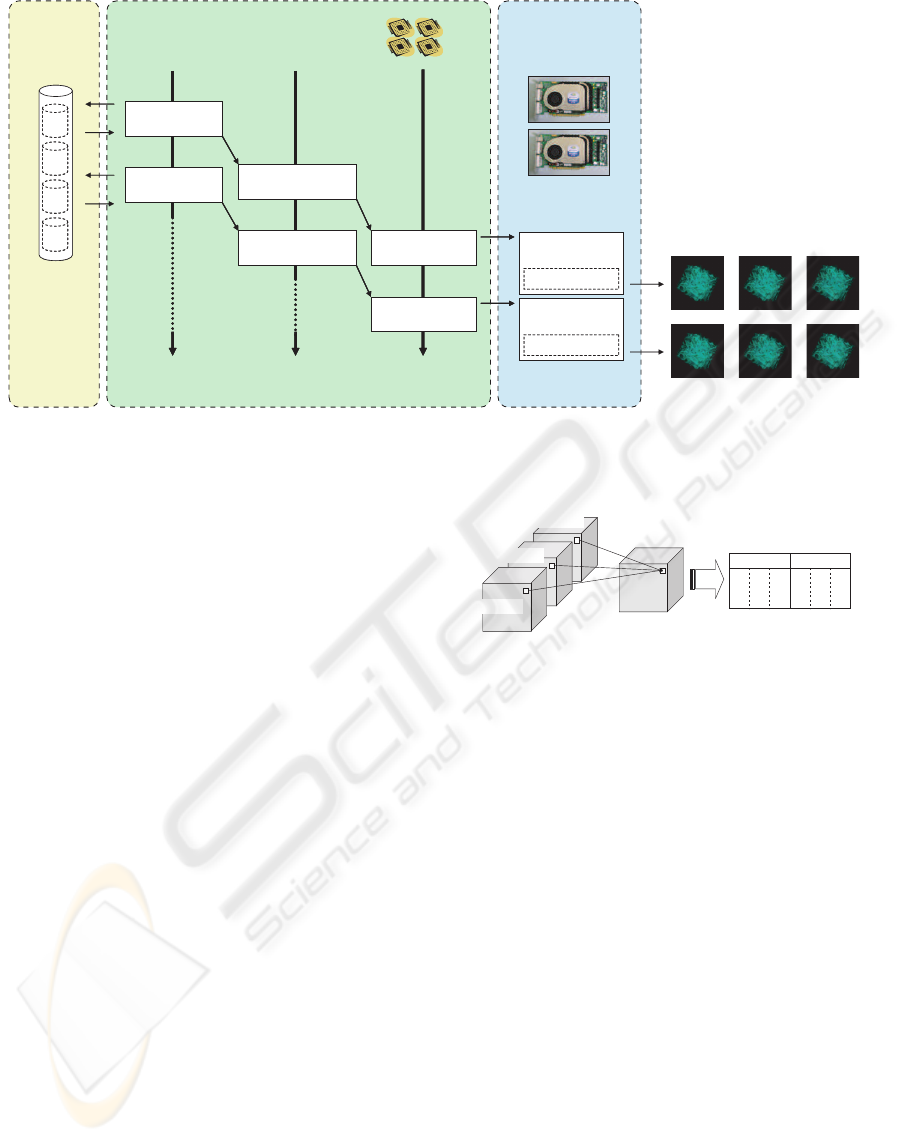
efficient real-time renderer on a COTS system. Fig-
ure 1 shows the model. We regard a COTS system
as a computer with hierarchical storages, having (1)
multiple disks, (2) main memory with multiple CPUs,
and (3) video memory with multiple GPUs. These hi-
erarchical storages are connected by two buses, each
with different bandwidths B
1
and B
2
, where B
1
and B
2
represent the bandwidth from disks to main memory
and that from main memory to video memory, respec-
tively. For example, our COTS system presented later
in Section 4 has B
1
= 103 and B
2
= 776 (MB/s).
Multiple disks can be realized using RAID tech-
nology (Patterson et al., 1988) at a low cost. We as-
sume that COTS systems have a RAID 0 array of disk
drives, where each disk drive separately stores differ-
ent parts of a file. This configuration maximizes I/O
bandwidth, because different parts can be loaded si-
multaneously from different drives. However, I/O la-
tency is limited by the seek time of a single drive.
Therefore, data size should be large enough to make
the seek time relatively small over the entire I/O time.
Thus, RAID technology reduces I/O time by increas-
ing I/O bandwidth between storage devices and main
memory.
Similarly, multiplication of the remaining com-
ponents also can be realized by recent COTS tech-
nologies at a low cost. Multi-core and SLI technolo-
gies (nVIDIA Corporation, 2006) allow us to com-
bine multiple CPUs and GPUs into a single computer,
respectively. Note here that multiplication is done
also in a single GPU. That is, GPUs have multiple
shaders to exploit data parallelism in a rendering task
(Montrym and Moreton, 2005).
Thus, our COTS model multiplies key compo-
nents in a single computer. This multiplication
Main memory with
multiple CPUs by
multi-core technology
Video memory with
multiple GPUs by
SLI technology
Multiple disks by
RAID technology
Effective bandwidth
B
2
= 776 (MB/s)
Effective bandwidth
B
1
= 103 (MB/s)
Figure 1: COTS computer model with hierarchical storage
devices. This model assumes that the computer has multi-
ple disks, CPUs, and GPUs to exploit data-parallelism in an
out-of-core rendering task.
can be regarded as a low-cost parallel architecture,
as compared with HPC systems. From this view-
point, clusters of PCs are also a low-cost solution.
However, clusters are distributed-memory machines,
which require image compositing after parallel ren-
dering (Molnar et al., 1994). This involves high-
overhead communication at every frame, and more-
over, it takes longer time as the number of PCs in-
creases (Ma et al., 1994). Therefore, we think that
our COTS model is a reasonable solution in terms of
cost and parallelism.
3 COTS-BASED OUT-OF-CORE
RENDERER
In this section, we describe our renderer designed on
the basis of the COTS model presented in Section 2.
Figure 2 shows an overviewof our pipelined renderer.
3.1 Design Aspects
Since out-of-core rendering systems must stream data
through the two buses with different bandwidths B
1
and B
2
, we need some mechanisms to deal with this
bandwidth gap. Otherwise, the entire performance
will be limited by the slower bus, and thus, the GPU
and CPU might become idle during rendering.
The key idea to overcome this gap is to use a two-
stage compression method, which performs data de-
compression both on the CPU and the GPU. In this
method, the raw data must be converted into doubly-
compressed data in advance of rendering. During ren-
dering, the doubly-compressed data is decompressed
firstly by the CPU, and then by the GPU. This two-
stage method aims at hiding the gap by adjusting
data size to the bandwidth. Therefore, the maximum
performance will be achieved if the CPU generates
REAL-TIME RENDERING OF TIME-VARYING VOLUME DATA USING A SINGLE COTS COMPUTER
221
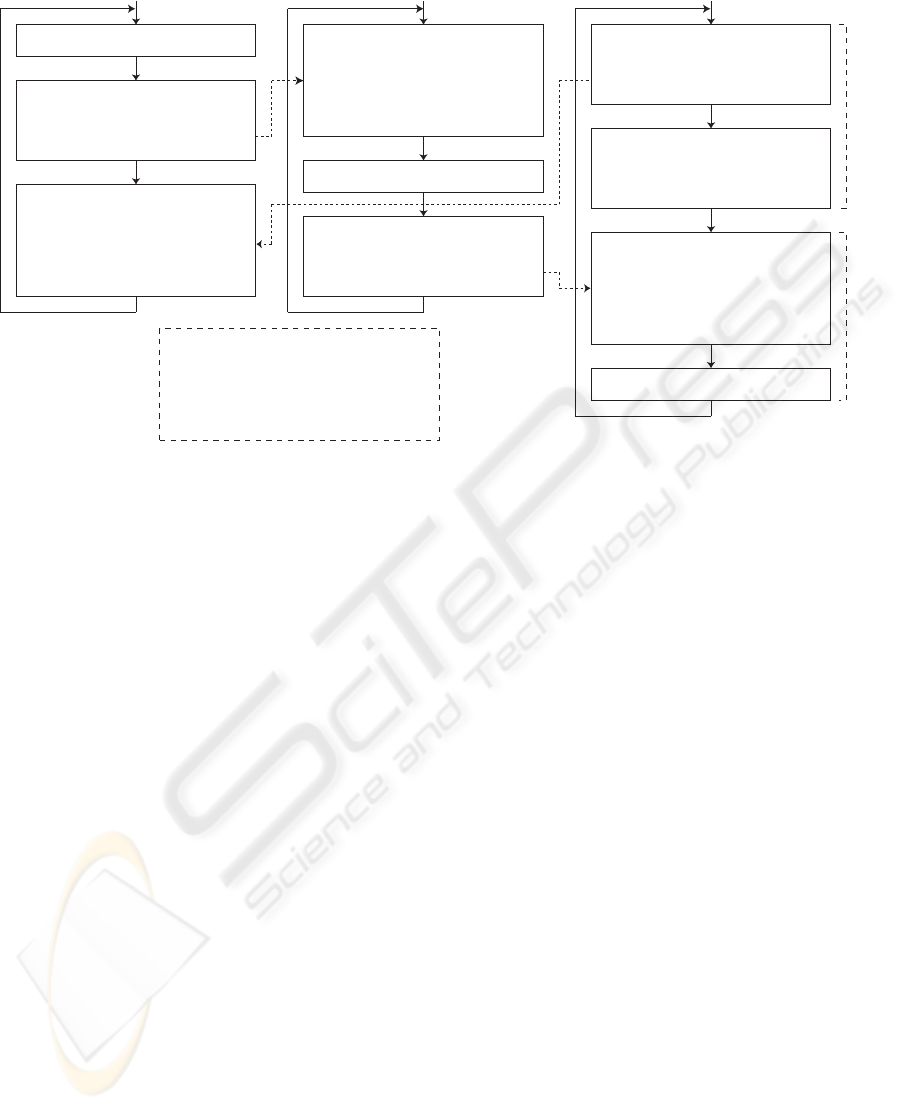
CPU side GPU side
Data loading
LZO decoding
Volume
rendering
Texture -based
rendering
PVTC decoding
(t+1)-th
data file
Data loading
LZO decoding
Volume
rendering
Texture -based
rendering
PVTC decoding
t-th
data file
SLI technology
Data loading
LZO decoding
Volume
rendering
Texture -based
rendering
PVTC decoding
Data loading
LZO decoding
Volume
rendering
Texture -based
rendering
PVTC decoding
Disk side
RAID
technology
I/O
thread
Decoding
thread
Rendering
thread
Multi-core technology
Time
step 3t
Time
step 3t+1
Time
step 3t+2
Time
step 3t+3
Time
step 3t+4
Time
step 3t+5
Figure 2: Overview of our pipelined rendering. The pipeline consists of three stages, each for data loading, LZO decoding,
and volume rendering. Doubly-compressed data is stored in disks as a file, containing successive volumes for three time steps.
B
2
/B
1
times larger data as compared with the doubly-
compressed data loaded from disks.
We also use a pipeline mechanism to overlap I/O
operations with computation. This mechanism in-
creases the throughput of the renderer, because it al-
lows us to process successive data simultaneously at
different pipeline stages. In addition, the pipeline
mechanism contributes to hide the decompression
overheads incurred on the CPU.
Finally, once the time-varying data is sent to the
GPU, the final image will be quickly generated by
the GPU. Our renderer uses a texture-based rendering
method (Cabral et al., 1994; Hadwiger et al., 2002),
which is fully accelerated by hardware components
in the GPU, such as texture mapping and alpha blend-
ing hardware. We currently use 3-D textures rather
than 2-D textures, because 2-D textures require three
times larger data (Hadwiger et al., 2002). Although
this might be a trivial problem for rendering of non-
time-varying data, it is critical for out-of-core (data-
intensive) rendering.
3.2 Two-Stage Data Compression
As shown in Figure 2, the two-stage compression
method performs data decompression both on the
CPU and the GPU. At the CPU side, we use
Lempel-Ziv-Oberhumer (LZO) compression (Ober-
humer, 2005). On the other hand, we use packed vol-
ume texture compression (PVTC) at the GPU side.
Thus, the raw data is firstly compressed by PVTC,
and then by LZO.
V3t+2(x,y,z)
V3t (x,y,z)
V3t+1(x,y,z)
Ct (x,y,z)
VTC
Each of 4x4x1 voxel (48-byte) blocks
are compressed into 8-byte data
R
G
B
R G B
3t 3t+1 3t+2
Block 1
R G B
3t 3t+1 3t+2
Block 2
...
A sequence of compressed blocks
each containing time-series data
Figure 3: Data compression using PVTC. Time-series
scalar voxels in the same location are packed into an RGB
voxel. This data packing generates a sequence of com-
pressed blocks, each containing time-series data.
This combination of different compression meth-
ods aims at taking architectural advantages of each
processing unit. As compared with the GPU, the
CPU has a memory hierarchy consisting of larger L1
and L2 cache and memory. These larger devices are
suited to LZO decompression, because it is based
on dictionary-based decoder (Ziv and Lempel, 1977),
which simply repeats data replication during decom-
pression.
In contrast, the GPU is based on a parallel ar-
chitecture capable of vector processing and single
instruction, multiple data (SIMD) processing (Mon-
trym and Moreton, 2005). This architecture exploits
higher parallelism than the CPU. Furthermore, some
GPUs have special hardware, such as a volume tex-
ture compression (VTC) decoder (OpenGL Extension
Registry, 2004), which provides us on-the-fly decom-
pression of compressed texture. These architectural
advantages are fully utilized by PVTC, which is an
extension of VTC. As shown in Figure 3, the dif-
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
222
// Stage S1
Data loading(&ld->tstep);
Loading thread Decoding thread Rendering thread
/* Stage S2 */
LZO decoding(&dc->tstep);
// send a signal to the decoding thread
pthread_mutex_lock(&ld->mutex);
ld->tstep += 3; // update time step
pthread_cond_signal(&ld->ready);
pthread_mutex_unlock(&ld->mutex);
// send a signal to the rendering thread
pthread_mutex_lock(&dc->mutex);
dc->tstep += 3; // update time step
pthread_cond_signal(&dc->ready);
pthread_mutex_unlock(&dc->mutex);
// receive a signal from the loading thread
pthread_mutex_lock(&ld->mutex);
while (&ld->tstep <= &dc->tstep) {
pthread_cond_wait(&ld->ready,
&ld->mutex);
}
pthread_mutex_unlock(&ld->mutex);
// receive a signal from the decoding thread
pthread_mutex_lock(&dc->mutex);
while (&dc->tstep <= &rd->tstep) {
pthread_cond_wait(&dc->ready,
&dc->mutex);
}
pthread_mutex_unlock(&dc->mutex);
/* Stage S3(b) */
Texture-based rendering(&rd->tstep);
// send a signal to the loading thread
pthread_mutex_lock(&rd->mutex);
rd->tstep++; // update time step
pthread_cond_signal(&rd->ready);
pthread_mutex_unlock(&rd->mutex);
// Stage S3(a)
if (rd->tstep % 3 == 0) {
glCompressedTexImage3d(&rd->tstep);
}
glutPostRedisplay();
Idle callback functionDisplay callback function
// receive a signal from the rendering thread
pthread_mutex_lock(&rd->mutex);
while (&ld->tstep > &rd->tstep+lookahead) {
pthread_cond_wait(&rd->ready,
&rd->mutex);
}
pthread_mutex_unlock(&rd->mutex);
typedef struct stage_tag {
pthread_mutex_t mutex;
pthread_cond_t ready; // ready signal
int tstep; // time step
} stage_t;
stage_t *ld, *dc, *rd; // each for stage S1, S2, S3
const int lookahead = 7;
Va riables
Figure 4: Pseudocode of our thread-based pipeline mechanism. See text for details. Variable ‘lookahead’ limits the number
of stream data in the pipeline. This pipeline is allowed to process nine time steps of the data simultaneously, because each of
the three stages can have the data containing three time steps.
ference to VTC is that PVTC packs three successive
scalar volumes into an RGB-channel volume in ad-
vance of VTC. This data packing aims at exploiting
the temporal coherence in time-varying volume data.
The doubly-compressed data is obtained by the
following two steps (see also Figure 3).
1. PVTC compression. Three successive scalar vol-
umes are packed into R, G, and B channels of a
single volume, respectively. The packed data is
converted into a compressed texture by VTC. Re-
gardless of data contents, the compression ratio is
fixed at a factor of 6, because VTC is a lossy com-
pression method.
2. LZO compression. The compressed texture is fur-
ther compressed by lossless LZO compression to
generate doubly-compressed data. The compres-
sion ratio achieved by LZO depends on the coher-
ence in the compressed texture.
In the rendering phase, the doubly-compressed
data is decoded by the following three stages.
S1. Data loading from disks. Doubly-compressed
data is loaded from disks to main memory. Note
here that a loaded file contains three successive
volumes due to PVTC data packing.
S2. LZO decoding on the CPU. The doubly-
compressed data is decompressed by LZO. A
compressed texture is then generated.
S3. Volume rendering on the GPU.
(a) Texture transfer. The compressedtexture is sent
from main memory to video memory.
(b) Texture-based rendering. Volumes stored in
R, G, and B channels of the compressed tex-
ture are rendered successively. Hardware-
accelerated on-the-fly decompression is pro-
vided by the VTC decoder.
Note here that PVTC reduces not only data size
but also the number of data loads from disks, be-
cause it packs three volumes into a volume, namely
a file. Similarly, the number of data transfers from
main memory to video memory is also reduced to 1/3.
These reductions allow us to minimize overheads re-
quired for I/O operations and texture transfers.
3.3 Pipeline Mechanism
Our pipeline mechanism intends to increase the ren-
dering throughput by overlapping I/O operations with
computation, as shown in Figure 2. To realize this
mechanism by software, we use the POSIX thread
library (Nichols et al., 1996). Our renderer creates
three threads for each of stages S1, S2, and S3: the
loading thread, the decoding thread, and the render-
ing thread, as shown in Figure 4.
This mechanism is thread-safe if the following
conditions C1 and C2 are satisfied during execution.
REAL-TIME RENDERING OF TIME-VARYING VOLUME DATA USING A SINGLE COTS COMPUTER
223
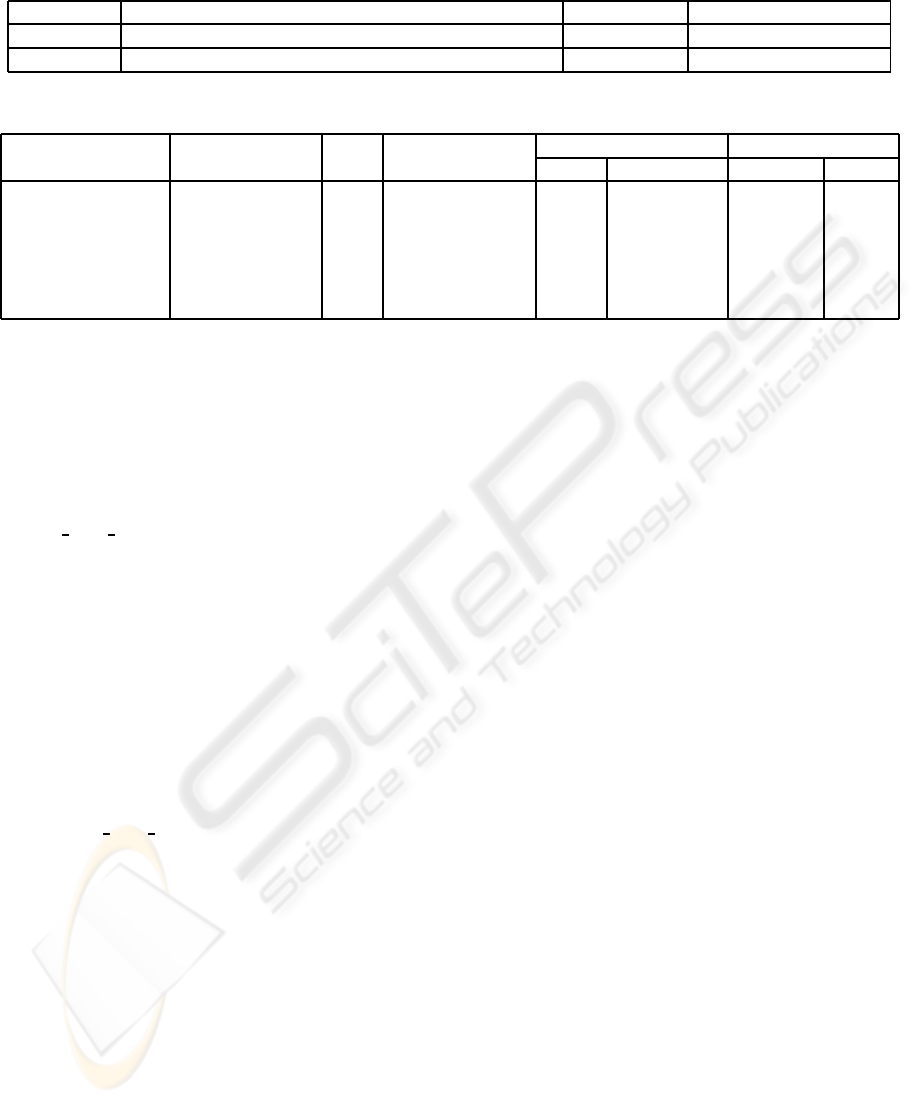
Table 1: Storage devices used for experiments.
Component Specification Latency (ms) B
1
: Bandwidth (MB/s)
Single disk 250GB SATA disk (Seagate Barracuda 7200.9) 13.8 57.0
RAID 0 Four 250GB SATA disks (Hitachi Deskstar T7K250) 12.8 103.3
Table 2: Datasets used for experiments.
Dataset
Volume size Time Raw file size per Compression ratio Coherence
(voxel) step time step (MB) PVTC PVTC+LZO Temporal Spatial
D1: Small jet 129× 129× 104 99 1.7 12.0 Low High
D2: Small vortex 128× 128× 128 99 2.0 6.5 Low Low
D3: Middle lung 256× 256 × 148 411 9.3
6
67.0 High High
D4: Middle jet 258× 258× 208 99 13.2 22.5 Low High
D5: Middle vortex 256× 256× 256 99 16.0 12.0 Low Low
D6: Large lung 512 × 512× 295 411 73.8 71.7 High High
C1. For all time steps t, the volume at time step t is
processed sequentially from stage S1 to stage S3.
C2. The rendering thread produces images in an as-
cending order of time step t.
To satisfy condition C1, we create threads
such that each of the threads is blocked with
pthread cond wait() until it receives a signal from the
upper thread. The upper thread, on the other hand,
sends a signal to the lower thread when it finishes the
responsible task. Also, the rendering thread sends a
wake-up signal to the loading thread after rendering.
Condition C2 can be satisfied by implementing a
first-in, first-out (FIFO) policy. To realize this, each
thread has variable ‘tstep,’ which stores the latest time
step processed at the corresponding stage. This infor-
mation is then used to prevent the stream data from
overtaking each other. That is, each thread is allowed
to process the t-th data if it is already processed by
the upper threads. Otherwise, it is repeatedly blocked
with pthread
cond wait() placed in a while loop.
4 EXPERIMENTAL RESULTS
We now show performance results of our renderer.
We implemented it using the C++ language, the
OpenGL library (Shreiner et al., 2003), the Cg toolkit
(Mark et al., 2003), and the POSIX threads library
(Nichols et al., 1996).
For experiments, we use a COTS computer
equipped with 2 GB of main memory and 1 TB of
Serial ATA disk devices shown in Table 1. The RAID
array is constructed using nVIDIA RAID, which is in-
cluded in nForce 590 SLI chipset. The computer has
a Pentium D (dual-core) CPU running at 3 GHz clock
speed and an nVIDIA GeForce 7900 GTX DDR SLI
card having 512 MB of video memory. The graph-
ics card is connected to a PCI Express 16X bus. The
effective bandwidth B
2
is 776 MB/s.
Table 2 summarizes six datasets D1–D6 used for
experiments. See also Figure 5 for their visualization
results. Datasets D1 and D2 (Ma, 2003) are fluid dy-
namics datasets showing a turbulent jet and a turbu-
lent vortex flow, respectively. Dataset D3 shows a
sequence of lung deformations representing a defor-
mation process of nonrigid registration (Hajnal et al.,
2001). The remaining datasets D4, D5, and D6 are
high-resolution versions of D1, D2, and D3, respec-
tively. Each dataset has voxels of 1-byte scalar data.
Datasets are rendered on a screen with an appro-
priate size: a 256 × 256 pixel screen for D1 and D2;
a 512 × 512 pixel screen for D3, D4, and D5; and a
1024× 1024 pixel screen for D6. The viewing direc-
tion is initially set to z-axis direction, and then it is
rotated 2 degrees around x- and y-axes when the time
step is updated.
4.1 Rendering Performance
To evaluate the performance gain of our renderer,
we compare it with 11 variations that utilize only a
part of the acceleration techniques: the RAID tech-
nology; the pipeline mechanism; and the two-stage
compression method. In the following, notations ‘R’
and ‘P’ indicates the RAID-equipped renderer and the
pipelined renderer, respectively. Notation ‘N’ repre-
sents the naive renderer without RAID and pipeline
mechanisms.
Figure 6 shows frame rates for 12 renderers. We
can see that the COTS-based out-of-core renderer
achieves a video rate of 35 frames per second (fps)
for 258× 258 × 208 voxel data with 99 time steps. It
also demonstrates an almost interactive rate of 4 fps
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
224
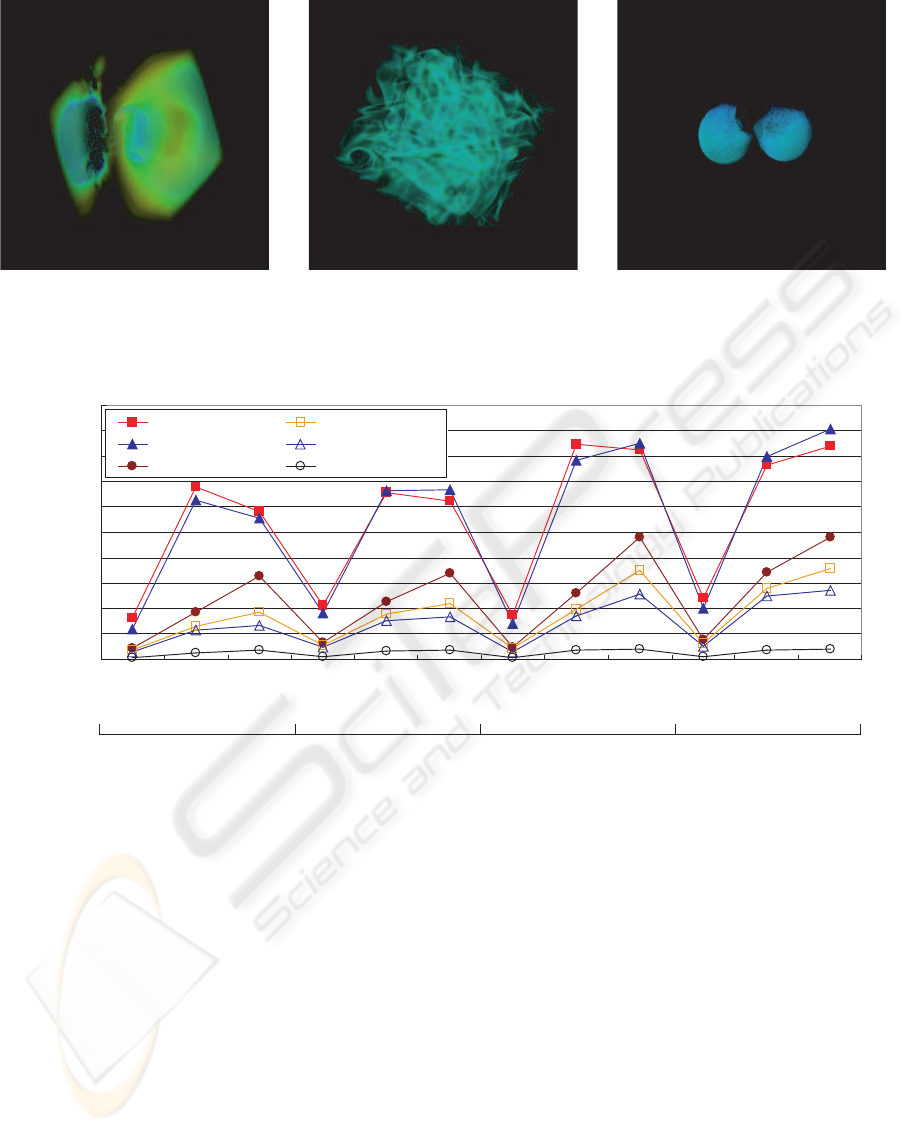
(a) (b) (c)
Figure 5: Produced images using three datasets. (a) D1: turbulent jet, (b) D2: turbulent vortex flow, and (c) D3: deforming
lung.
0
10
20
30
40
50
60
70
80
90
100
D1: Small jet
D2: Small flow
D3: Middle lung
D4: Middle jet
D5: Middle flow
D6: Large lung
Rendering performance (fps)
Raw PVTC PVTC
+LZO
Raw PVTC PVTC
+LZO
Raw PVTC PVTC
+LZO
Raw PVTC PVTC
+LZO
R P RPN
Figure 6: Rendering performance in frames per second (fps). Notations ‘R’ and ‘P’ indicates the RAID-equipped renderer
and the pipelined renderer, respectively. Notation ‘N’ represents the naive renderer without RAID and pipeline mechanisms.
for 512 × 512× 295 voxel data with 411 time steps.
These performance results are competitive with prior
results (Akiba et al., 2005), which achieve 1.1 fps for
256× 256× 1024 voxel data with 400 time steps.
Improvement achieved by the pipeline mechanism
is not significant if I/O time is not reduced by com-
pression or RAID. For example, the P renderer re-
sults in 1–17% improvement over the N renderer if
compression methods are not used. In contrast, com-
pression methods increase this improvement ratio to
3–91%. The RP renderer also increases the ratio to
49–73% by RAID. This means that most of the exe-
cution time is spent by I/O operations if we do not use
compression or RAID. Therefore, overlapping I/O op-
erations with other operations is not effective in this
case. Thus, we must reduce I/O time by RAID and/or
compression methods in order to maximize the per-
formance benefits of the pipeline mechanism.
The improvement ratio of 3–91% also indicates
that two-stage compression is effective especially on
pipelined renderers. Such renderers allow us to over-
lap decompression overheads with I/O time, as we
mentioned in Section 3.1.
4.2 Breakdown Analysis
Table 3 shows the total executiontime T and its break-
down: T
d
, T
l
, and T
g
. T
d
and T
l
here represent the
time for data loading and LZO decompression, re-
spectively. T
g
is the time for texture-based rendering,
including the time T
t
for texture transfers.
Firstly, we analyze the effects of data compression
REAL-TIME RENDERING OF TIME-VARYING VOLUME DATA USING A SINGLE COTS COMPUTER
225
Table 3: Breakdown analysis of execution time. T represents the total execution time required for rendering of a volume at
a certain time step. Times T
d
, T
l
, and T
g
are the breakdown of time T, each representing the time for data loading, for LZO
decompression, and for texture-based rendering. T
g
includes time T
t
for texture transfers.
Data- Ren-
Raw PVTC PVTC+LZO
sets derer
I/O GPU I/O GPU I/O LZO GPU
T
d
T
t
T
g
T T
d
T
t
T
g
T T
d
T
l
T
t
T
g
T
N 53.4 4.4 4.7 61.6 11.0 1.5 2.2 14.7 11.1 2.3 1.5 2.3 17.2
D1
R 38.9 4.4 4.7 47.2 11.4 1.5 2.3 15.2 9.9 2.5 1.5 2.3 16.1
P 56.1 4.5 5.0 56.9 11.2 1.4 1.8 11.8 11.6 1.7 1.4 1.7 12.1
RP 40.5 4.6 5.2 41.3 12.5 1.4 1.8 13.1 11.4 1.7 1.4 1.7 11.9
N 75.8 4.0 4.9 82.5 11.5 1.8 2.6 15.9 11.4 2.3 1.8 2.8 18.0
D2
R 48.0 3.9 4.9 54.6 10.6 1.9 2.8 15.0 8.5 2.5 1.8 2.9 15.0
P 69.5 3.6 4.2 70.4 12.2 1.7 2.1 12.8 11.1 2.0 1.7 2.1 11.8
RP 49.2 3.6 4.2 49.3 12.1 1.7 2.0 12.5 10.4 2.0 1.7 2.1 11.0
N 188.9 13.3 13.7 215.9 38.2 8.2 11.5 53.8 12.1 2.9 8.2 11.4 30.5
D3
R 121.5 13.4 13.8 148.7 28.1 8.2 11.7 44.1 11.6 2.6 8.2 11.4 29.6
P 204.6 14.6 15.6 205.5 37.5 8.1 8.5 38.2 12.8 2.7 8.3 15.7 20.8
RP 128.3 14.1 15.0 129.1 28.3 8.1 8.7 29.1 11.8 2.8 8.0 15.3 20.7
N 231.1 19.0 19.4 264.2 54.8 11.7 16.4 75.6 23.2 9.6 11.7 16.3 53.6
D4
R 142.8 19.0 19.4 175.6 35.3 11.8 16.4 56.1 16.0 8.8 11.8 17.1 45.1
P 229.9 23.0 23.9 230.8 49.8 11.6 12.2 50.4 20.4 9.6 11.9 20.3 28.6
RP 154.7 23.6 24.7 155.5 35.2 11.7 12.4 35.7 16.9 9.5 11.9 21.1 27.9
N 294.9 25.8 26.2 325.5 58.2 14.4 20.4 85.4 33.9 13.3 14.1 20.0 73.7
D5
R 174.8 25.7 26.2 205.3 38.7 14.2 20.1 65.1 20.4 12.9 14.1 20.1 59.8
P 322.9 27.0 28.1 323.8 57.7 14.9 15.5 58.3 34.2 13.3 14.8 24.6 38.7
RP 193.3 31.7 32.7 194.0 38.7 14.9 21.7 40.1 22.7 13.6 15.1 28.1 36.9
N 1360.8 102.9 104.0 1482.5 207.2 65.1 125.6 366.9 26.6 19.7 121.2 183.0 261.9
D6
R 766.0 102.8 103.9 895.3 137.4 67.5 127.0 299.9 19.6 19.4 126.3 187.9 260.2
P 1445.2 134.4 136.1 1446.1 209.7 93.6 196.0 270.7 27.0 20.7 91.9 216.4 253.6
RP 855.2 133.8 135.5 856.1 140.0 93.2 208.7 260.1 21.3 22.2 91.8 215.6 253.2
methods on the N renderer. In Table 3, we can see that
PVTC achieves 3.5–5.2 times higher performance, as
compared to the raw renderer. Furthermore, the com-
bination of PVTC and LZO achieves 1.2–1.8 times
higher performance than PVTC for datasets D3, D4,
D5, and D6. This performance gain is obtained by the
reduction of time T
d
. For D1 and D2, however, this
combination fails to show the performance gain over
PVTC. This is mainly due to the small file size. For
such small datasets, I/O time is mainly limited by I/O
latency, as we mentioned in Section 2. Therefore, the
renderer fails to reduce time T
d
, and moreover, it in-
creases time T
l
due to the decompression overheads.
Secondly, we compare the N renderer with the P
renderer to analyze the effects of the pipeline mech-
anism. In the N renderer, T
d
, T
l
, and T
g
accounts for
most of the entire time T. In contrast, the P renderer
overlaps these three overheads to reduce the entire
time T. As a result, it achieves a 1.9-fold speedup
over the N renderer at the best case. In many cases,
this pipeline mechanism reduces the entire time T
roughly to time T
d
, because the data loading stage is
the bottleneck stage in the pipeline. Therefore, the
decompression cost T
l
is usually hidden by time T
d
.
Thus, the pipeline mechanism is capable of hiding the
overheads of the two-stage compression method.
Finally, we compare the N renderer with the R ren-
derer to analyze the effects of RAID technology. This
technology reduces time T
d
by approximately 30%
for larger datasets. On the other hand, it fails to re-
duce time T
d
if it is approximately 10 ms. This re-
sult is reasonable because the threshold of 10 ms is
close to the I/O latency of a single disk shown in Ta-
ble 1. Thus, RAID technology is useful if the data
file is large enough to distribute it to every disk in the
RAID array.
5 CONCLUSION
We have presented performance results of an out-
of-core renderer for time-varying volume. Our ren-
derer is based on two software-based techniques
that increase the performance: (1) a two-stage data
compression method and (2) a thread-based pipeline
mechanism. The renderer is implemented efficiently
on a recent COTS computer equipped with multiple
GPUs, CPUs, and storage devices using SLI, multi-
core, and RAID technologies, respectively.
Experimental results indicate that the COTS-
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
226

based out-of-core renderer achieves a video rate of
35 frames per second (fps) for 258× 258× 208 voxel
data with 99 time steps. It also demonstrates an al-
most interactive rate of 4 fps for 512 × 512 × 295
voxel data with 411 time steps. These performance
results are competitive with prior results.
We also find that most of the execution time is
spent by I/O operations if we do not use compres-
sion or RAID. Therefore, we think that I/O time
must be reduced by RAID and/or compression meth-
ods in order to maximize the performance benefit of
the pipeline mechanism. The two stage compression
method achieves 3.6–7.1 times higher rendering per-
formance than the raw renderer. By integrating this
method into the pipeline mechanism, it achieves a
1.9-fold speedup at the best case. We think that the
pipeline mechanism is useful to hide the overheads of
data decompression.
One future work is to present performance com-
parison with traditional HPC-based renderers.
ACKNOWLEDGEMENTS
This work was partly supported by JSPS Grant-in-
Aid for Scientific Research for Scientific Research
(B)(2)(18300009) and on Priority Areas (17032007).
We would like to thank the anonymous reviewers for
their valuable comments.
REFERENCES
Akiba, H., Ma, K.-L., and Clyne, J. (2005). End-to-end data
reduction and hardware accelerated rendering tech-
niques for visualizing time-varying non-uniform grid
volume data. In Proc. 4th Int’l Workshop Volume
Graphics (VG’05), pages 31–39.
Bethel, W., Tierney, B., Lee, J., Gunter, D., and Lau, S.
(2000). Using high-speed WANs and network data
caches to enable remote and distributed visualization.
In Proc. High Performance Networking and Comput-
ing Conf. (SC’00), 23 pages (CD-ROM).
Cabral, B., Cam, N., and Foran, J. (1994). Accelerated vol-
ume rendering and tomographic reconstruction using
texture mapping hardware. In Proc. 4th Symp. Volume
Visualization (VVS’94), pages 91–98.
Chiueh, T. and Ma, K.-L. (1997). A parallel pipelined ren-
derer for time-varying volume data. In Proc. 2nd Int’l
Symp. Parallel Architectures, Algorithms and Net-
works (I-SPAN’97), pages 9–15.
Hadwiger, M., Kniss, J. M., Engel, K., and Rezk-Salama,
C. (2002). High-quality volume graphics on consumer
PC hardware. In SIGGRAPH 2002, Course Notes 42.
Hajnal, J. V., Hill, D. L., and Hawkes, D. J., editors (2001).
Medical Image Registration. CRC Press, Boca Raton,
FL.
Kniss, J., McCormick, P., McPherson, A., Ahrens, J.,
Painter, J., Keahey, A., and Hansen, C. (2001). Inter-
active texture-based volume rendering for large data
sets. IEEE Computer Graphics and Applications,
21(4):52–61.
Lum, E. B., Ma, K.-L., and Clyne, J. (2002). A hardware-
assisted scalable solution for interactive volume ren-
dering of time-varying data. IEEE Trans. Visualiza-
tion and Computer Graphics, 8(3):286–301.
Ma, K.-L. (2003). Time-Varying Volume Data Repository.
http://www.cs.ucdavis. edu/˜ ma/ITR/tvdr.html.
Ma, K.-L., Painter, J. S., Hansen, C. D., and Krogh, M. F.
(1994). Parallel volume rendering using binary-swap
compositing. IEEE Computer Graphics and Applica-
tions, 14(4):59–68.
Mark, W. R., Glanville, R. S., Akeley, K., and Kilgard,
M. J. (2003). Cg: A system for programming graphics
hardware in a C-like language. ACM Trans. Graphics,
22(3):896–897.
Molnar, S., Cox, M., Ellsworth, D., and Fuchs, H. (1994).
A sorting classification of parallel rendering. IEEE
Computer Graphics and Applications, 14(4):23–32.
Montrym, J. and Moreton, H. (2005). The GeForce 6800.
IEEE Micro, 25(2):41–51.
Nichols, B., Buttlar, B., and Farrell, J. P. (1996). Pthreads
Programming. O’Reilly & Associates, Newton, MA.
nVIDIA Corporation (2006). nVIDIA SLI.
http://www.slizone.com/.
Oberhumer, M.F.X.J. (2005). LZO real-time data compres-
sion library. http://www.oberhumer.com/
opensource/lzo/.
OpenGL Extension Registry (2004). Gl
nv texture
compression vtc. http://oss.sgi.com/projects/ogl-
sample/registry/NV/texture compression %vtc.txt.
Patterson, D. A., Gibson, G. A., and Katz, R. H. (1988).
A case for redundant arrays of inexpensive disks
(RAID). In Proc. the ACM SIGMOD Int. Conf. Man-
agement of Data (SIGMOD ’88), pages 109–116.
Shreiner, D., Woo, M., Neider, J., and Davis, T. (2003).
OpenGL Programming Guide. Addison-Wesley,
Reading, MA, fourth edition.
Strengert, M., Magall´on, M., Weiskopf, D., Guthe, S.,
and Ertl, T. (2005). Large volume visualization of
compressed time-dependent datasets on GPU clusters.
Parallel Computing, 31(2):205–219.
Yu, H. and Ma, K.-L. (2005). A study of I/O methods
for parallel visualization of large-scale data. Parallel
Computing, 31(2):167–183.
Ziv, J. and Lempel, A. (1977). A universal algorithm for
sequential data compression. IEEE Trans. Information
Theory, 23(3):337–343.
REAL-TIME RENDERING OF TIME-VARYING VOLUME DATA USING A SINGLE COTS COMPUTER
227
