
COMPARATIVE EXPERIMENT OF BODY-POSITION BASED
NAVIGATION IN IMMERSIVE VIRTUAL ENVIRONMENTS
Kikuo Asai
National Institute of Multimedia Education, Mihama-ku, Chiba, Japan
Hideaki Kobayashi
The Graduate University for Advanced Studies, Mihama-ku, Chiba, Japan
Keywords: Human-Computer Interaction, Body-Position Based Navigation, Virtual Environment, Immersive Projection
Display.
Abstract: Navigation is one of the basic human-computer interactions in virtual environments, and the technique
should be easy to use, cognitively simple, and uncumbersome. However, the interaction in immersive
virtual environments requires a factor of the sense of immersion as well as efficiency. We have proposed a
body-position based navigation technique that drives a viewpoint with extension and bending of the arms,
rotating both arms, and standing on tiptoes and bending the knees. Using various parts of the body may help
to enhance the sense of immersion in the virtual environment. Depth images obtained from a polynocular
stereo machine are used for tracking the 3D positions of the arms and head of the user in an immersive
projection display. We evaluated the body-position system in experiments in which participants performed
fly-through tasks in a 3D space, and compared the effectiveness of the body-position system with that of a
joystick and a hand-arm gesture interface. The results of the experiment showed that the body-position
system was advantageous on moving around at large areas instead of efficiency or accuracy of viewpoint
control in virtual environments.
1 INTRODUCTION
Navigation is a basic human-computer interaction
(HCI), which is generally a way to move the user
into the location where she/he performs the primary
tasks. Therefore, the interaction technique should be
easy to use, cognitively simple, and uncumbersome
(Bowman and Hodges, 1999). However, these
factors are not enough for immersive virtual
environments (VEs). The navigation in immersive
VEs needs essence to enhance the feeling of being
there so that the HCI makes fly-through content
enjoyable, which takes the user around in the three-
dimensional (3D) virtual world.
Most current fly-through systems employ a 3D
mouse, joystick, or glove as the input device in VEs
(Vince, 1995; Bowman, et al., 2005). Such devices
allow for intuitive control of speed and direction of
movement because they are easy to use and
understand, and are not physically tiring to
manipulate. However, these devices are designed
focusing on efficiency or accuracy, but not
immersion enhancement. We have proposed using
body position as a means of navigation. The user's
viewpoint moves with movements of both the arms
and legs (Figure 1), and hence the user is required to
maintain their balance. Using various parts of the
body and sensory organs may provide the user with
an enhanced sense of immersion, and increase
interactivity with the immersive VE.
Figure 1: Body-position based interface.
106
Asai K. and Kobayashi H. (2007).
COMPARATIVE EXPERIMENT OF BODY-POSITION BASED NAVIGATION IN IMMERSIVE VIRTUAL ENVIRONMENTS.
In Proceedings of the Second International Conference on Computer Graphics Theory and Applications - AS/IE, pages 106-113
DOI: 10.5220/0002078701060113
Copyright
c
SciTePress

The immersive projection display (IPD) (Cruzz-
Neira, 1992; Ihren and Frisch, 1999), surrounds
users with stable wide-angle images giving them
immersive VEs. It uses lightweight stereo glasses,
thereby eliminating the need to wear large headgear
such as a head-mounted display. IPDs are often used
for presenting 3D entertainment contents where the
users enjoy navigation itself in the immersive VEs.
The navigation of the contents is usually done by a
joystick with a magnetic sensor used for pointing at
3D objects. Alternative interfaces should be
investigated to gain the user's sense of presence in
the virtual world.
It is often difficult for users to decide an
appropriate interface device in 3D VEs and
development of efficient interaction techniques,
because the most effective ways for humans to
interact with synthetic 3D environments are still not
clear and may depend on the applications (Herndon,
et al., 1994). This has given rise to studies on design
and evaluation guidelines of the interfaces used in
3D VEs (Gabbard, et al., 1999; Kaur, et al., 1999),
but there is little work on the evaluation of 3D
interaction by body position in immersive VEs and
on the adaptability to their applications in emphasis
on the sense of immersion.
We examined performance of the body-position
based navigation system by making an experiment
of fly-through tasks in 3D VEs in comparison with a
joystick and a hand-arm gesture interface often used
in IPDs.
2 RELATED WORK
Various techniques have been developed for
applications to HCI using body motion. Mapping
head movements to navigation has been dedicated to
hands-free fly-through applications in VEs, although
the sensors have often been implemented in
interfaces using a wired approach. A head-directed
system (Fuhrmann, et al., 1998) determines speed
and direction of navigation. The advantage of such a
system is to be simple requiring no additional
hardware except a head tracker, but using a head
direction leads to limitation of the view direction.
Both head and foot movements have been
mapped into viewpoint motion (LaViola, 2001).
This system used a floor map as a world in miniature
to move to the desired location in the virtual world,
and detected the body's lean to enable movement
over a small distance. The interaction technique is
suited for moving to specific places, but not for
moving around in VEs such as fly-through
applications.
The physically connected systems constrain
natural movements of the user within VEs. The user
often has to be aware of any cabling in their
immediate vicinity. Holding interface devices leaves
the user the feeling of machine manipulation.
Studies have also been performed that focus on
wireless interaction without attachment of tethered
trackers. Body balance was mapped to navigation
according to weight shifts detected using weight
sensors (Fleischmann, 1999). The user controls
speed and direction through the entire body and
balance. However, the weight sensors needed a large
platform that makes the implementation difficult in
the system requiring a floor display such as IPDs.
A vision-based interface is then one of the most
suitable candidates for applications in which the user
moves the body within VE systems, allowing full
freedom of movement. The ALIVE system (Maes, et
al., 1997) is a gesture-language system in which the
user interacts with virtual creatures, and the
movements are controlled by the position of the
user's head, hands, and feet, through vision-based
tracking. They have been applied to the control of
avatars rather than 3D navigation. Magic Carpet
(Freeman, et al., 1998) was designed for navigation
in a 2D space, but a 3D VE was not considered. The
positional interpretation provided by vision-based
tracking has been mapped into navigation of 3D
game controls or inside a 3D Internet city by
movement of the user's body (Wren, et al., 1997; F.
Sparacino, et al., 2002).
All these works have been addressed on design
issues of HCI in VEs, but not on evaluation issues of
user performance, though the prototypes have been
developed for demonstrations. HCI by body position
has yet to be examined as a possible interface for
navigation in 3D VEs, particularly for a vision-based
system with an IPD.
3 SYSTEM OVERVIEW
3.1 Assignment of Body Position
We utilize both arms and legs for navigation, so that
the movements contribute to maintaining balance.
The user is therefore required to control viewpoint
motion and maintain their balance simultaneously.
Here, the basic premise of these assignments is an
intuitive understanding of the relationship between
body position and viewpoint motion. Figure 2
illustrates the assignment of body movements to
COMPARATIVE EXPERIMENT OF BODY-POSITION BASED NAVIGATION IN IMMERSIVE VIRTUAL
ENVIRONMENTS
107
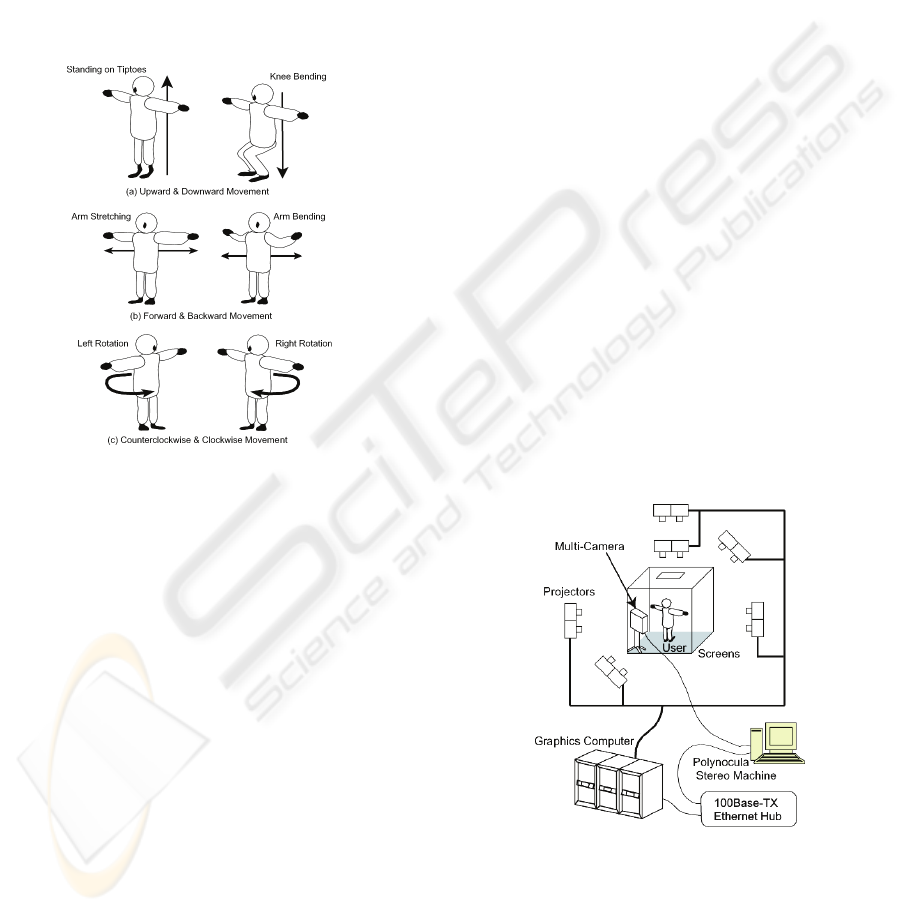
viewpoint motion. The movements are limited to the
following 3 degrees of freedom (DOF) in order to
simplify the control parameters:
Upward and downward movement of the head;
standing on tiptoes and bending of knees.
Horizontal movement of hands; extending and
bending arms.
Left and right rotation of both arms around the
axis of the body.
These 3 DOF correspond to vertical motion, forward
and backward motion, and counterclockwise and
clockwise rotation motion in VEs, respectively.
Figure 2: Assignment of body position.
Flexibility of body movements may generate the
various mapping methods between body position
and viewpoint motion. We decided to use the above
assignment, after the preliminary test obtained the
result that the above assignment was more suitable
for navigation by body position in VEs, than the
other two; 1) the body movements are identical to
the above but the viewpoint moves at the same
direction to that of extending and bending arms, and
2) upward and downward movements of the arms
are assigned to the vertical motion, instead of
standing on tiptoes and bending of knees.
3.2 Viewpoint Control
The image sensor must detect the 3D positioning of
both edges of the hands and the top of the head.
However, we cannot simply apply color or motion
segmentation techniques to the extraction of the
target, because the background images also change
in the screens of the IPD. Depth images are acquired
for extracting the body shape by the polynocular
stereo machine (Kimura, et al., 1999). Here, we use
a primitive structure to simplify the body position,
created by generating a straight line between the
edges of both hands.
To maintain stability at a point and smooth
motion of the viewpoint, the threshold and scale
were adjusted based on the properties of the body-
position movements using a trial and error process.
In forward and backward driving, the width between
the both hands when the arms are outstretched is
defined as the maximum forward speed, and two
thirds of the maximum width is linearly adjusted to
represent a speed of zero. When the hands are
brought together to less than two thirds of the
maximum width, the viewpoint begins to move
backwards.
3.3 Implementation
Figure 3 shows the system configuration of the IPD.
The VE system TEELeX (Asai, et al., 1999)
incorporates a 5.5 multi-screen display designed to
generate stereo images with the circular polarization
method. The acoustic system is also installed into
the display for 3D spatial sounds with 8 speakers.
The user's location is taken around the center of the
floor screen (3 m x 3 m) along the forward-
backward axis diagonal to the screen corners. The
multi-camera equipment is placed behind the user at
the edge of the screens, such that it does not obstruct
the view of the user.
Figure 3: System configuration.
An Onyx2 graphics computer [SGI] is used to
generate images of the virtual world. The
polynocular stereo machine is a Pentium III 1 GHz
PC, connected to the graphics computer. The body-
position data from the polynocular stereo machine is
multicast with UDP/IP, designating the receiving
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
108
address. The polynocular stereo machine generates
depth images with the size of 280 x 200 pixels at the
frame rate of 30 frame/sec, which have the
resolution of 4 mm at 1 m, 15 mm at 2 m, and 34
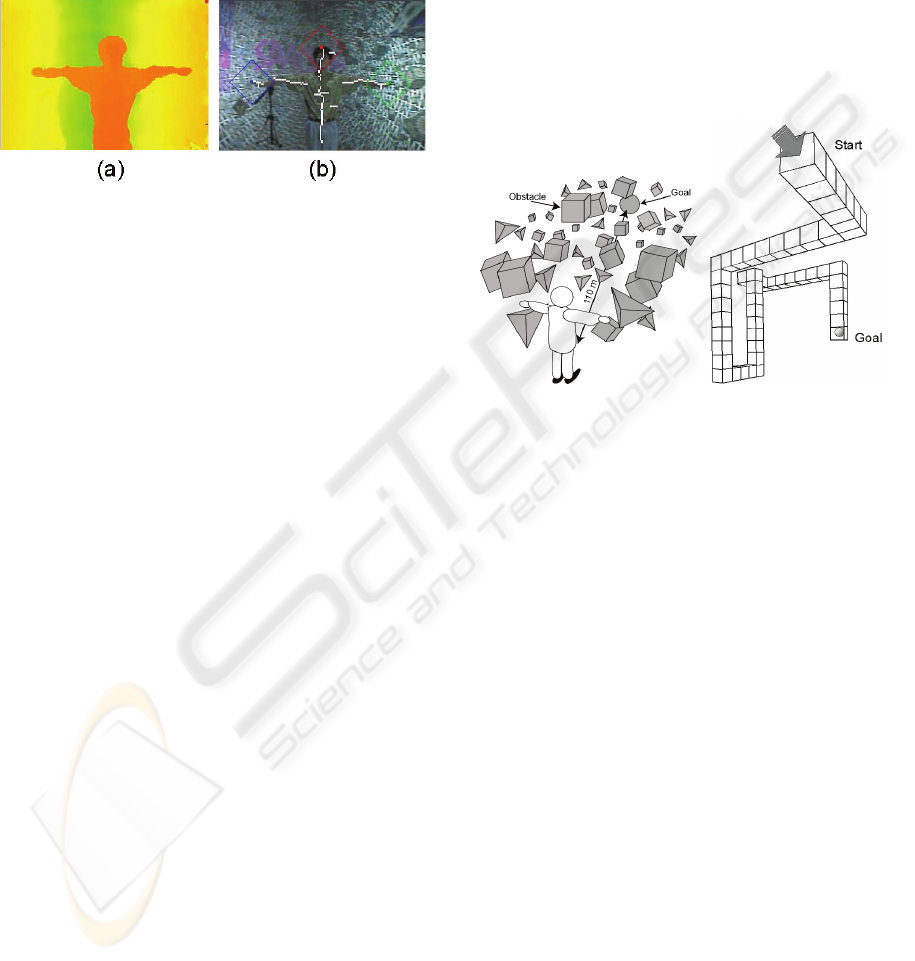
mm at 3 m from the camera, respectively. Figure 4
shows examples of (a) depth image, and (b)
extracted skeleton with tracking points.
Figure 4: Examples of (a) depth image, and (b) extracted
skeleton with tracking points.
4 EXPERIMENT
We performed an experiment comparing the body-
position system with a joystick and a hand-arm
gesture interface. The experiment was designed to
address evaluation issues on user performance
including interaction style and cognitive capability
in navigation.
4.1 Method
4.1.1 Participants
21 participants took part in the experiment, all of
whom were aged from 18 to 28 and had normal
vision. Most of the participants had experience of
stereoscopic views, but none had experienced
navigation using the body-position system in an IPD.
4.1.2 Tasks
We prepared two different tasks for measuring
characteristics of the performance. The tasks were
designed as follows (Obstacle and Hallway), in
which the users were required not only to move
directly to a place but also to move dynamically with
their surrounding condition and to cope with the
cognitive loads in a VE.
In Obstacle, a participant is required to reach a
goal as fast as possible while avoiding obstacles in
the VE. A sky-blue transparent sphere 5 m in
diameter is put as the goal at the opposite end of the
VE from the initial point. Blue-white mottled
tetrahedrons and brown textured cubes are placed
within an area of 60 m from the center of the VE.
Figure 5 (a) shows a schematic layout of the
obstacles in the VE. The position of the goal is
initially fixed, but is modeled so as to elude the user
as the user approached. The speed of the goal is set
at 0.3 times the viewpoint speed. The 5,000
tetrahedron and cube obstacles are randomly located
and revolved around the center of the VE at 0.5 rpm.
Therefore, collisions occur even when the viewpoint
is motionless. When the viewpoint collides with the
obstacles, the viewpoint rebounds elastically
resulting in time loss.
(a) Obstacle (b) Hallway
Figure 5: The layout of the VE.
In Hallway, a participant is required to reach a
goal through a 3D hallway as fast as possible while
memorizing objects such as 3D models, pictures,
and Kanji idioms with their loci and directions. This
information gathering task was based on the work by
D. A. Bowman et al. [1998]. The hallway is
composed of 50 blocks of cube with 3 m edges, as
shown in Figure 5 (b). 12 objects are placed in the
hallway presented with transparent-green walls. We
used the popular pictures such as the Mona Lisa and
the Scream of Munch, and the familiar idioms with
four Kanji characters. When the viewpoint collides
with the wall of the hallway, the viewpoint rebounds
softly instead of getting out of the hallway.
4.1.3 Apparatus
The images were presented via the stereoscopic
display at a resolution of 1000 x 1000 dots per
screen, and the sounds were output from the 8
speakers. In the tasks, collision sounds notify the
participant of the collision besides the background
color change to red synchronously. The standing
position of the participant was basically fixed around
the center in the IPD.
COMPARATIVE EXPERIMENT OF BODY-POSITION BASED NAVIGATION IN IMMERSIVE VIRTUAL
ENVIRONMENTS
109
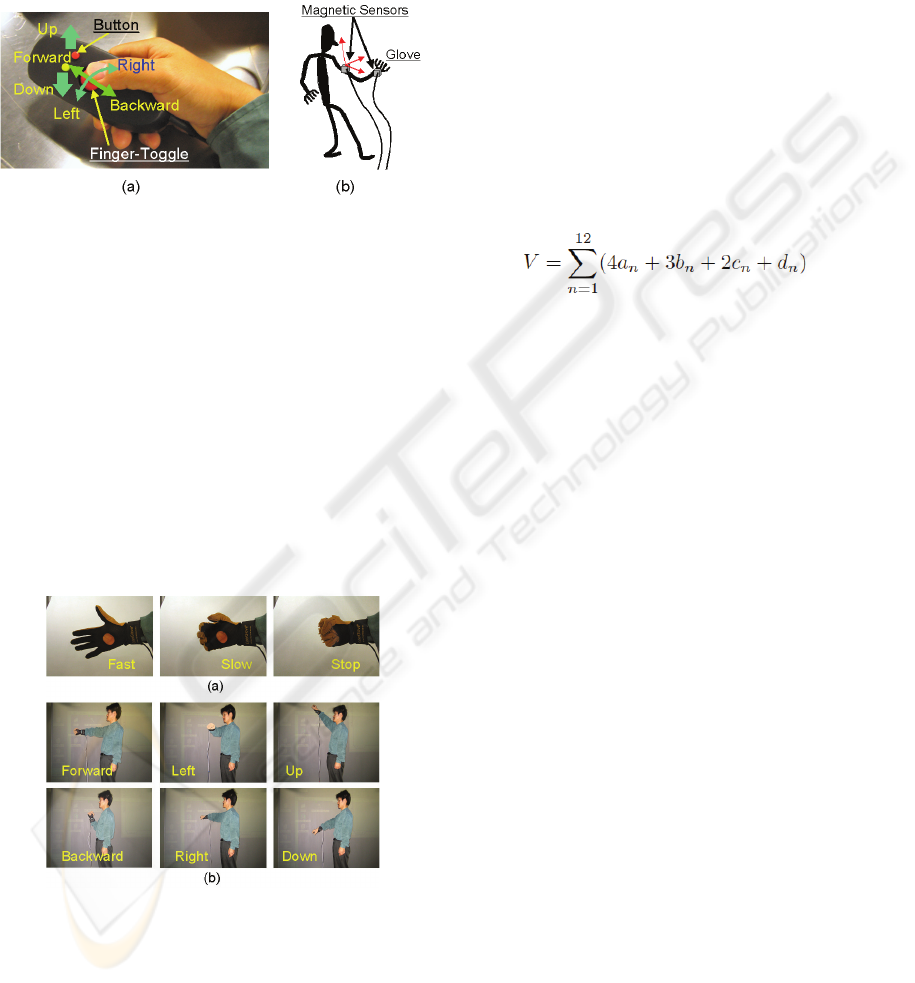
We used a joystick and hand-arm gestures
(Figure 6) as interfaces compared with the body-
position based navigation system. Wanda
○,
R
[Ascension] was implemented as a joystick, which
has been popularly used as a navigation device in
IPDs.
Figure 6: The compared interfaces (a) joystick and (b)
hand-arm gestures.
Figure 7 shows the hand-arm gestures. Flathand
and fist movements were mapped into adjustment of
the speed, and spreading and bending the arm
controlled the forward and backward directions,
respectively. Shifting the hand left and right rotates
the viewpoint left and right, and shifting the hand up
and down moves the viewpoint up and down. The
hand shapes are detected by resistive bend-sensing
of CyberGlove
○,
R
[Immersion] that transforms hand
and finger motions into joint-angle data. The
positions of the arm are detected by two magnetic
sensors of FASTRAK
○,
R
[Polhemus], which are put
on the back of the hand and the upper part of the arm.
Figure 7: The hand-arm gestures; (a) flathand and fist
movements for the speed control, (b) spreading and
bending, rotation, and upward and downward movements
of the arm.
4.1.4 Measurements
We measured the task completion time for each trial,
in which participants complete a series of
manipulations for the joystick, the hand-arm gesture
interface, and the body-position system. In the
Obstacle task, the number of collisions and the loci
of the viewpoint were recorded as accuracy
measurements for the navigation.
In the Hallway task, the cognitive load is defined
as accuracy of the information memorizing task. We
counted the number of
object/direction/location/surface sets the participant
got exactly right, and several variations of partially
correct objects, directions, loci, and surfaces. A
single response variable V that would encompass all
of these values was formulated as
(1)
where n expresses the kind of object. a is the number
of object/direction/location/surface sets exactly
correct, b represents responses that have three of
four aspects (object/direction/location/surface)
correct, and c is responses where two of four aspects
correct, and d is responses where only one of the
aspects are correct. The location over one block was
regarded as a correct answer.
4.1.5 Procedure
The trials were performed from the Obstacle task for
each participant. The Obstacle and Hallway tasks
had the trial seven times and twice, respectively. The
participants proceeded to the trials using a second
interface after the trials using the first interface.
In the body-position system, each task began
with capture of the initial position. The participants
were told to fix their bodies in a straight standing
position with both arms outstretched at shoulder
height, being advised to turn their palms upwards so
as to reduce fatigue. In the hand-arm gesture
interface, each task began with calibration of the
hand shapes that slightly depend on a user. The
recursive movements of flathand and fist are needed
for capturing the hand shapes. The joystick did not
need any calibration for the manipulation.
Before the actual experiment began, each
participant was allowed to practice controlling the
viewpoint until they felt controllable with the
interface. During the practice, participants were
advised to master staying at one point in the VE, and
were allowed to ask any questions about the task at
that time. After the word "Start" appeared on the
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
110
screen, the participants were instructed to reach the
goal as quickly as possible and the word "Goal" was
displayed to notify the participant of the end of the
trial.
4.2 Results
One out of 21 Participants was retired because she
did not feel well during the experiment, and the data
were excluded from the analysis. The rest of
participants experienced all the tasks, but had some
trials that were not completed and some extras were
done in the tasks.
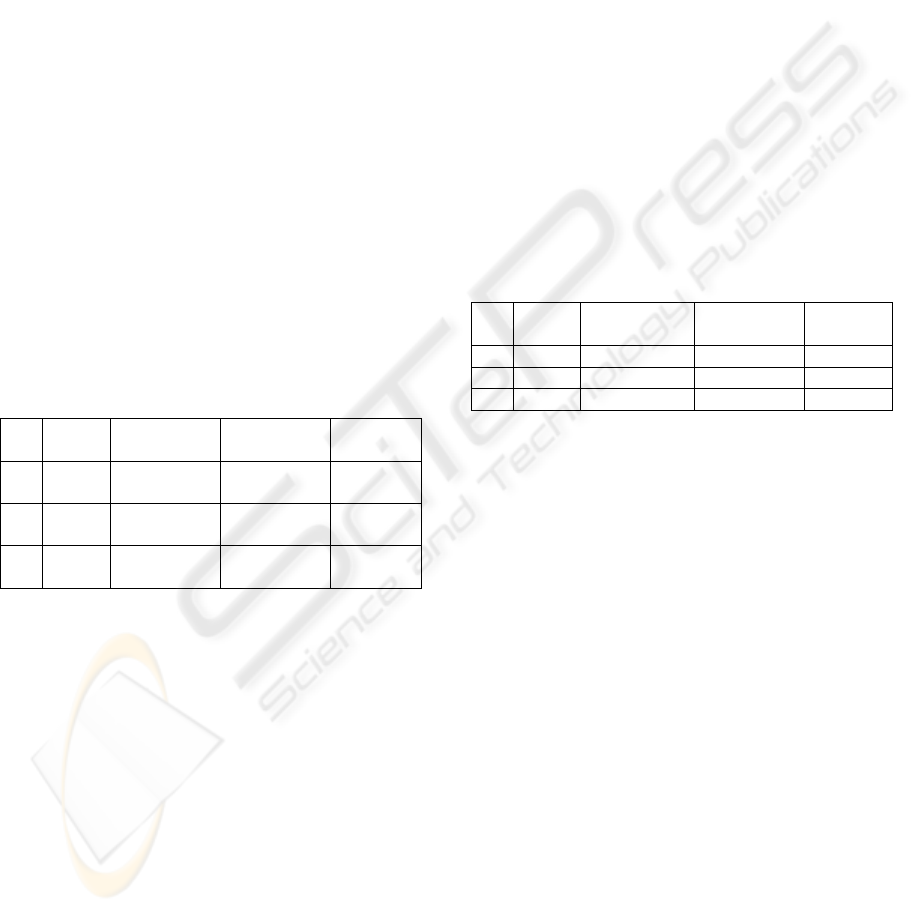
4.2.1 Obstacle Task
Table 1 lists the experimental results of the task
performance for each interface in the Obstacle task.
Each value indicates the average among the trials
experienced by the participants, and the value inside
the parenthesis is the standard deviation. The
Obstacle task had 139 trials for the joystick, 140 for
the hand-arm gestures, and 139 for the body-position
system, respectively. The joystick and body-position
system included one participant who did not
complete the trial once.
Table 1: Results of the Obstacle task.
Trials Time
[sec]
Collision
number
Speed
[km/h]
(a) 139 27.9 (12.1) 0.88 (1.7) 19.6
(15.9)
(b) 140 24.0 (14.5) 0.84 (1.9) 19.5
(6.9)
(c) 139 19.3 (9.3) 1.21 (2.1) 24.3
(15.1)
(a) Joystick, (b) Hand-arm, and (c) Body-position
A one-way ANOVA was performed for the
effect of interface on the completion time, collision
number, and speed in the VE. The effect of
completion time on the interface was statistically
significant at F(2,415) = 15.29, p < 0.01. Post hoc
analyses were conducted in order to compare all
possible pairs of the interfaces. The analyses show
that the trials with the body-position system were
completed significantly faster than those with either
joystick or the hand-arm gestures. There was no
significant difference between the joystick and the
hand-arm gestures in the completion time.
The effects of collision number and speed on the
interface had no significant difference at F(2,415) =
1.54 (p > 0.01) and F(2,415) = 6.13 (p > 0.01),
respectively. However, the speed effect had a trend
toward significance on the interface. Post hoc
analyses comparison of the pairs of the interfaces
showed that the navigation with the body-position
system had significantly higher speed than that with
the hand-arm gestures, and a trend to be faster than
that with joystick.
4.2.2 Hallway Task
The table 2 lists the results of the task performance
for each interface in the Hallway task. Each value
indicates the average among the trials experienced
by the participants, and the value inside the
parenthesis is the standard deviation. The Hallway
task had 34 trials for the joystick, 35 for the hand-
arm gestures, and 31 for the body-position system,
respectively. Although we designed that each
participant had the trial twice for each interface, 6, 5,
and 9 participants did complete the trial only once
for the joystick, the hand-arm gestures, and the
body-position system, respectively, because they felt
uncomfortable during the trials.
Table 2: Results of the Hallway task.
Trials Time
[sec]
Memorizing
value
Speed
[km/h]
(a) 34 120.3 (35.0) 29.8 (8.8) 7.4 (3.2)
(b) 35 147.0 (32.6) 26.7 (8.6) 5.4 (1.2)
(c) 31 164.3 (29.8) 29.9 (9.9) 5.0 (1.3)
(a) Joystick, (b) Hand-arm, and (c) Body-position
The results of ANOVA showed significant
effects of completion time and motion speed on the
interface at F(2,97) = 17.48 and F(2,97) = 16.93, p <
0.01, respectively, but no significant effect of the
interface on the information memorizing at F(2,97)
= 1.44, p > 0.01. Post hoc analysis comparison
showed that trials with the joystick had a
significantly shorter time of completion comparing
with trials with the body-position system and the
hand-arm gestures. The completion time had a trend
toward a significant difference between the body-
position system and the hand-arm gestures. Post hoc
analyses of the motion speed showed the similar
result to the completion time. Besides, the trials with
joystick had the larger standard deviations in the
completion time and the motion speed, compared to
those with the hand-arm gestures and body-position
system.
4.3 Discussion
We examined the user performance of the navigation
using the body-position, compared with the joystick
and the hand-arm gestures. We expected that
COMPARATIVE EXPERIMENT OF BODY-POSITION BASED NAVIGATION IN IMMERSIVE VIRTUAL
ENVIRONMENTS
111

different techniques of navigation would produce
different levels of user performance. We found that
the task worked as a significant factor that
dominated the results as well as the interface was the
significant variable.
In the Obstacle task, the body-position had a
significant effect on the task performance, and the
body-position system was superior to the joystick
and the hand-arm interface in the completion time
and the motion speed. One of our concerns is that
the body-position technique works to drive the
motion speed into being kept, and did not simply
result in improving performance for the navigation
in VEs, because more collisions were observed at
higher speeds when using the body-position
interface, while there was not clear correlation
between the collision frequency and speed for
individuals.
One possible scenario is that the body-position
interface promoted the participants willingness to
travel at higher speeds. This caused situations in
which it was easy to collide with the obstacles. The
participants who could evade collisions well,
reached the goal in a shorter period of time.
Otherwise, unavoidable collisions due to high-speed
movement resulted in longer times. Another scenario
is that the participants tended to dodge obstacles by
controlling direction, but not speed when using the
body-position interface. Stopping the motion was
often observed until the obstacles passed when using
the joystick. Keeping the velocity zero was a simple
process at the joystick because the participants could
just let go off the lever. Conversely, when using the
body-position interface, the participants had to
search for zero motion position for forward and
backward directions.
In the Hallway task, the joystick had an
overwhelming effect in the completion time and the
motion speed, though the excursion level was quite
high between the participants. The significant effect
of the joystick could be interpreted as the properties
where the joystick makes a user possible to navigate
VEs subtly. The travel with the joystick was quite
stable, accurately controlling the 3D position,
direction, and speed for the viewpoint. The large
excursions of the completion time and the motion
speed between the participants was possibly caused
by differences of the experiences using the similar
devices. The excursions between the participants
were not so large in the body-position system and
the hand-arm gestures, where the participants had no
previous experiences, as in the joystick.
Surprisingly, the navigation techniques did not
affect information memorizing scores, though we
expected that different control techniques would
produce different levels of cognitive loads. To
interpret the results, we checked the participants'
behavior from the recorded video. We found that
most of the participants took strategies for
performing the Hallway task with careful
information memorizing. The participants focused
on memorizing the objects, and passed slowly
through the hallway, sometimes stopping at the
objects for ordering their memory. Thus, the lack of
significant difference implies that the information
memorizing took priority over the completion time,
rather than simply that the level of cognitive loads
did not differ between the interfaces.
Overall, the results of the experiment indicated
that the body-position system was advantageous on
moving around at large areas instead of efficiency or
accuracy of navigation in VEs, while the joystick
appears to be advantageous on accurate viewpoint
motion control. The hand-arm gestures had the
middle characteristics between the body-position
system and the joystick. It is suggested that the
body-position based navigation is suitable for an
application getting users enjoying fly-through itself
with some entertaining elements.
5 CONCLUSIONS
We have developed a body-position based
navigation system as a vision-based interface in an
immersive VE. In our implementation, the body-
position enables us to navigate VEs via arm and
head movements without the need for devices
attached to the body. Stable position tracking is
achieved using depth images in the IPD. We
conducted an empirical evaluation by comparing the
body-position system with the joystick and the hand-
arm gesture interface. The results of the experiment
showed that the performance for the interfaces
depended on the task, and the body-position system
was advantageous on moving around at large areas
instead of efficiency or accuracy of navigation in
VEs. This suggests that the body-position interface
tends to suit applications in which amusement and
enjoyment are important, and conversely may not be
suitable for applications that require a high
efficiency.
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
112

ACKNOWLEDGEMENTS
This study was supported in part by Grants-in-Aid
for Scientific Research (18500754).
REFERENCES
K. Asai, N. Osawa, and Y. Y. Sugimoto, Virtual
environment system on distance education, Proc.
EUROMEDIA'99, pp.242-246 (1999)
D. Bowman, and L. Hodges, Formalizing the design,
evaluation, and application of interaction techniques
for virtual environments, Journal of Visual Languages
and Computing, vol.10, pp.37-53 (1999)
D. Bowman, D. Koller, and L. Hodges, A methodology
for the evaluation of travel techniques for immersive
virtual environments, Virtual Reality: Research,
Development, and Applications, vol.3, pp.120-131
(1998)
D. Bowman, E. Kruijff, J. J. LaViola, Jr., and I. Poupyrev,
3D User Interfaces; Theory and Practice, Addison
Wesley (2005)
C. Cruzz-Neira, D. J. Sandin, T. A. DeFanti, R. V. Kenyon,
and J. C. Hart, The cave automatic virtual environment,
Communications of the ACM, vol.35, pp.64-72 (1992)
M. Fleischmann, T. Sikora, W. Heiden, W. Strauss, K.
Sikora, and J. Speier, The virtual balance: an input
device for VR environments, GMD Report, vol.82,
pp.1-11 (1999)
W. Freeman, D. B. Anderson, P. A. Beardsley, C. N.
Dodges, M. Roth, C. D. Weissman, W. S. Yerazunis,
H. Kage, K. Kyuma, Y. Miyake, and K. Tanaka,
Computer vision for interactive computer graphics,
IEEE Computer Graphics and Applications, vol.18,
pp.42-53 (1998)
A. Fuhrmann, D. Schmalstieg, M. Gervautz, Strolling
through cyberspace with your hands in your pockets:
head directed navigation in virtual environments, Proc.
4th EUROGRAPHICS Workshop on Virtual
Environments, pp.216-227 (1998)
J. L. Gabbard, D. Hix, and E. J. Swan, User centered
design and evaluation of virtual environments, IEEE
Computer Graphics and Applications, vol.19, pp.51-59
(1999)
K. Herndon, A. van Dam, and M. Gleicher, The
challenges of 3D interaction, SIGCHI Bull, vol.26,
pp.36-43 (1994)
J. Ihren, and K. J. Frisch, The fully immersive CAVE,
Proc. 3rd International Projection Technique
Workshop, pp.58-63 (1999)
K. Kaur, N. Maiden, and A. Sutcliffe, Interacting with
virtual environments: an evaluation of a model of
interaction, Interacting with Computers, vol.11,
pp.403-426 (1999)
S. Kimura, T. Shinbo, H. Yamaguchi, E. Kawamura, and
K. Nakano, A convolver-based real-time stereo
machine (SAZAN), Proc. IEEE Computer Society
Conference on Computer Vision and Pattern
Recognition, pp.457-463 (1999)
J. J. LaViola, D. F. Keefe, and D. Acevedo, Hands-free
multi-scale navigation in virtual environment, Proc.
2001 Symposium on Interactive 3D Graphics, pp.9-15
(2001)
P. Maes, B. Blumberg, T. Darrel, and A. Pentland, The
ALIVE system: wireless full-body interaction with
autonomous agents, ACM Multimedia Systems, vol.5,
pp.105-112 (1997)
F Sparacino, C. Wren, A. Azarbayejani, A. Pentland,
Browsing 3-D spaces with 3-D vision: body-driven
navigation through the Internet city, Proc.
International Symposium on 3D Data Processing
Visualization and Transmission, pp.214-223 (2005)
J. Vince, Virtual reality systems, ACM Press (1995)
C. R. Wren, F. Sparacino, A. J. Azarbayejani, T. J. Darrell,
J. W. Davis, T. E. Starner, A. Kotani, C. M. Chao, M.
Hlavac, K. B. Russell, A. Bobick, and A. P. Pentland,
Perceptive spaces for performance and entertainment:
untethered interaction using computer vision and
audition, Applied Artificial Intelligence, vol.11,
pp.267-284 (1997)
COMPARATIVE EXPERIMENT OF BODY-POSITION BASED NAVIGATION IN IMMERSIVE VIRTUAL
ENVIRONMENTS
113
