
MORPHOLOGY-BASED REPRESENTATIONS OF DISCRETE
SCALAR FIELDS
Mohammed Mostefa Mesmoudi
Department of Mathematics, Mostaganem University, Route Belhacel Po.Box 227, 27000 Mostaganem, Algeria
Leila De Floriani
Department of Computer Science, University of Genova, Via Dodecaneso n 35, 16146 Genova, Italy
Keywords:
Gradient vector field, Morse theory, Geometric modeling, Smale decomposition, Forman theory.
Abstract:
Forman introduced in (Forman, 1998) a theory for cell complexes that is a discrete version of the well known
Morse theory. Forman theory finds several applications in digital geometry and image processing where
the data to be processed are discrete, see for instance (Lewiner et al., 2002a), (Lewiner et al., 2002b). In
(DeFloriani et al., 2002b), we have introduced a Smale-like decomposition of a scalar field f defined on a
triangulated domain M based on a discrete gradient field that simulates well the behavior of the gradient field
in the differentiable case. Here, we extend our discrete gradient vector field so that the extended form coincides
with a Forman gradient field. The extended gradient field does not change the Smale-like decomposition
components and, thus, inherits properties of both smooth Morse and discrete Forman functions.
1 INTRODUCTION
Morse theory is a powerful tool for understanding the
topology and the geometry of a manifold on which
a C
2
-differentiable function is defined. This theory
has been developed in the middle of the last cen-
tury by Thom, Morse, Milnor and Smale. Any C
n
-
differentiable function (with n ≥ 2) can be approxi-
mated with its derivatives by a Morse function, (Mil-
nor, 1963). Thom (Thom, 1949), followed by Smale
(Smale, 1960), has shown that a manifold M endowed
with a Morse function admits a CW representation
composed of cells, called stable( or unstable) man-
ifolds. Each cell is associated with a critical point
of the function. This decomposition is based on the
study of the behavior of the gradient vector field of the
function. Another decomposition of the manifold into
handles can be performed by following the growth of
level sets of the function (Milnor, 1963). The topol-
ogy (i.e., the homotopy type) of the level sets changes
when a critical point is reached. Thus, critical points
have a crucial role in Morse theory.
For a discrete scalar field, the field values are known
only on a discrete set of points scattered over a grid
(regular or irregular). To study a scalar field, an inter-
polation by a differentiable function is usually done,
(Watson et al., 1985) and (Nackman, 1984). Then,
Morse theory is used to extract critical points and
critical lines that bound the cells of a Morse com-
plex. This operation depends on the approximation
performed and is expensive in term of computation
time and memory space. To reduce that, other au-
thors tried to treat the data of a two-dimensional im-
age (Peucker and Douglas, 1975)and (J.Toriwaki and
Fukumura, 1975) by performing a local study around
each point. Other authors (Bajaj and Shikore, 1998),
(Bajaj et al., 1998) and (Edelsbrunner et al., 2001)
have interpolated the discrete data by piecewise lin-
ear functions, loosing, thus, the differentiability ad-
vantages.
In 1998, Forman introduced for cell complexes a
novel theory that is a discrete equivalent to Morse the-
ory (Forman, 1998). He has proven similar results to
those proven within the smooth Morse theory. For-
man theory handles the data discretely in a new way
differently from all the other methods known simu-
lating the differentiable case. Forman succeeded to
prove all the main theorems of smooth Morse the-
ory for discrete functions. Forman theory is finding
several applications in computer graphics (see, for in-
stance, (Lewiner et al., 2002b) and (Lewiner et al.,
2002a)).
137
Mostefa Mesmoudi M. and De Floriani L. (2007).
MORPHOLOGY-BASED REPRESENTATIONS OF DISCRETE SCALAR FIELDS.
In Proceedings of the Second International Conference on Computer Graphics Theory and Applications - GM/R, pages 137-144
DOI: 10.5220/0002080501370144
Copyright
c
SciTePress

In (DeFloriani et al., 2002b), we have intro-
duced a Smale-likedecomposition a of triangulated n-
dimensional domain M associated with a scalar field
f. We deduced a discrete gradient vector field Grad f,
which we have been used in (DeFloriani et al., 2002a)
to extract, and classify critical points and to extract
a discrete Morse decomposition that represents the
topology structure of the field. We have shown in
(Danovaro et al., 2003) that our discrete gradient vec-
tor field simulates well the behavior of the differen-
tiable gradient field case.
Here, we construct an extended form of our dis-
crete gradient vector field that corresponds to the gra-
dient field of a Forman function F whose restriction
over vertices of M coincides with the initial scalar
field f . We give the explicit formulation of Forman
function F that satisfies the above property. As a con-
sequence, we have that:
• All Forman results (specifically, simplification
and compression process) can be applied to our
discrete scalar field.
• For a triangulated embedded domain, not all the
values over the cells of a Forman function are
necessary to study the morphology of the domain.
Only values at the vertices are required.
• Differentiability simulation of the induced gra-
dient vector field allows us to understand the
behavior of the corresponding Morse function
well, and hence its decomposition into stable and
unstable components.
• The compatibility of our extended gradient field
with both smooth Morse and discrete Forman gra-
dient fields provides a powerful tool to handle
continuous and discrete properties at the same
time.
The remainder of this paper is organized as fol-
lows. In the next Section we summarize some results
relative to smooth functions, and we recall some com-
binatorial notions. In Section2, we present the main
properties of smooth Morse theory. In Section 4, we
report some results from Forman theory that we need
for our construction. In Section 5, we review briefly
our Smale-like decompositionand we discuss some of
its properties. In Section 6, we present the construc-
tion of the process that extends our discrete gradient
vector field to a Forman one. This proves the compat-
ibility of our Smale-like decomposition with Forman
theory. In the last section, we describe our on-going
work.
2 BACKGROUND
In this Section we recall some fundamental notions
on functions and some combinatorial notions that we
need in the remainder of the paper.
Let f be a differentiable real-valued function de-
fined on a manifold M of dimension n. The gradient
of f at a point P ∈ M is a vector Grad
P
f tangent to M
at P that is defined by the first derivatives of f at P.
We have Grad
P
f = (
∂f
∂x
1
, . . . ,
∂f
∂x
n
), where (x
1
, . . . ,x
n
)
are local coordinates around P. The set of all gradi-
ent vectors in M is called the gradient vector field of
f and denoted by Grad f. We say that P is a crit-
ical point of f if the gradient vector vanishes at P.
It is well known that the gradient vector field indi-
cates the steepest direction in which the function is in-
creasing. Curves integrating the gradient vector field
(i.e., everywhere tangent to the gradient vector field)
are called integral curves. Integral curves follow the
(gradient) direction in which f has the maximal in-
creasing growth. Hence, integral curves cannot be
closed, nor infinite (in a compact manifold), and they
do not self-intersect. They are emanating from critical
points, or from boundary components of the domain
and converge to other critical points, or to boundary
components.
Let now recall some combinatorial notions, for de-
tails we refer to (Agoston, 1976). Let k be an integer,
a k-simplex or a k- dimensional simplex is the con-
vex hull of (k+ 1) affinely independent points, called
vertices. A face σ of a k-simplex γ, σ ⊆ γ, is a j-
simplex (0 ≤ j ≤ k) generated by ( j+1) vertices of γ.
A simplicial complex K is a collection of simplexes,
called also cells, such that if γ is a simplex in K, then
each face σ ⊆ γ is in K, and, the intersection of two
simplexes is either empty or a common face of them.
We call a top simplex in K a simplex which is not the
proper face of any simplex in K.
The carrier | K | of a simplicial complex K is the
space of all points in simplexes of K. In this case, K
is called a triangulation of | K |.
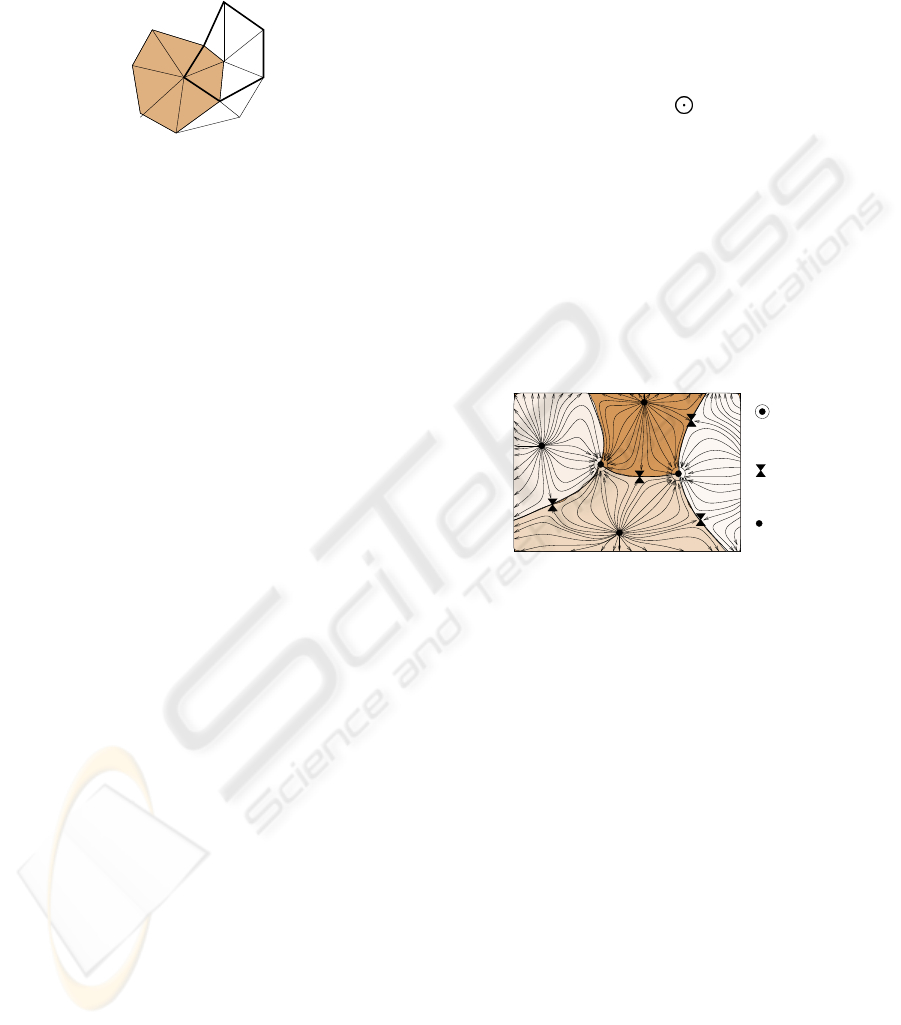
Let K be a simplicial complex and γ be a cell in K.
The star of γ is the set St(γ) of all cells in K which are
incident at γ. Thus, St(γ) = {σ ∈ K : γ ⊆ σ}. The star
of γ describes the neighborhood of γ in the complex
(see Figure 1(a)). The closure of a set of cells Γ is the
smallest subcomplex
Γ of K containing Γ. Clearly, Γ
consists of all cells of Γ plus their faces.
The link of cell γ is the subcomplex Lk(γ) of K
defined as Lk(γ) = St(γ)−St(γ), where γ is the closure
of γ. The link describes the boundary of St(γ) (see
Figure 1(a)).
A cone from a vertex w to a simplex γ is the con-
vex combination of all vertices of γ with w. We denote
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
138
it by (γ, w). If w is affinely independent of the vertices
of γ, then the cone from w to γ is a simplex of dimen-
sion dim(γ) + 1, where dim(γ) denotes the dimension
of γ.
v
w
(c)
Figure 1: The shaded region is the star of v. The graph in
bold is the link of the vertex w.
3 SMOOTH MORSE THEORY
A Morse function on a manifold M is a C
2
-
differentiable real-valued function f defined on M
such that its critical points are non-degenerate (Mil-
nor, 1963). This means that the Hessian matrix
Hess
P
f of the second derivativesof f at any point P ∈
R
d
on which the gradient of f vanishes (Grad
P
f = 0)
is non-degenerate (Det(Hess
P
f 6= 0). Morse (Milnor,
1963) has proven that there exists a local coordinate
system (y
1
, ..., y
n
) in a neighborhoodU of any critical
point P, with y
j
(P) = 0, for all j = 1, . .. , n, such that
the identity
f = f(P) − (y
1
)
2
− ... − (y
ı
)
2
+ (y
ı+1
)
2
+ ... + (y
n
)
2
holds on U, where ı is the number of negative eigen-
values of Hess
P
f, and it is called the index of f at P.
The above formula implies that the critical points of a
Morse function are isolated. This allows us to study
the behavior of f around them, and to classify their
nature according to the signs of the eigenvalues of the
Hessian matrix of f. If the eigenvalues are all pos-
itives, then the point P is a strict local minimum (a
pit). If the eigenvalues are all negatives, then P is a
strict local maximum (a peak). If the index ı of f at
point P is different from 0 and n, then the point P is
neither a minimum nor a maximum, and, thus, it is
called an ı-saddle point (a pass).
The decomposition of the manifold domain asso-
ciated with f, introduced by Thom (Thom, 1949) and
followed by Smale (Smale, 1960), is based on the
study of the growth of f along its integral curves. In-
tegral curves originating from a critical point of index
ı form a ı-cellC
s
, called a stable manifold. In the same
way, integral curves converging to a critical point of
index ı form a dual (n− ı)-cell C
u
, called an unstable
manifold. Stable manifolds are pair-wise disjoint and
decompose the field domain M into open cells, (see
Figure 2). The cells form a complex, as the boundary
of every stable manifold is the union of lower dimen-
sional cells. Similarly, the unstable manifolds decom-
pose M into a complex dual to the complex of stable
manifolds.
Figure 2 gives an example of a stable decomposition
of a two-dimensional scalar field, which is assumed to
be a Morse function. It has three minima (shown by
•), two maxima (shown by
), and five saddle points
(shown by ⊲⊳). Integral curves originate from each
minimum in all directions and from the right side of
the boundary. Each integral curve converges either to
a saddle, to a maximum, or to a boundary component.
Two integral curves originate from each saddle point.
Integral curves originating from a minimum (or from
the right side boundary) sweep a 2D cell, while inte-
gral curves emanating from a saddle point form a seg-
ment containing the saddle point in its interior. Inte-
gral curves connecting saddles to other critical points
are called separatrices.
Maximum
Minimum
Saddle
Figure 2: Decomposition of a domain into four stable 2-
manifolds.
4 FORMAN THEORY
In this Section, we discuss discrete Morse functions,
introduced by Forman, and their main properties as-
proved in (Forman, 1998). Let K be simplicial com-
plex, we denote with σ
(p)
a simplex of dimension p.
By σ < τ we indicate that σ is a face of the simplex τ.
Definition 1 Let f be a real valued function defined
on K. We say that f is a discrete Morse function, or a
Forman function if and only if, for every simplex σ
(P)
,
#{τ
(p+1)
> σ
(p)
: f(τ) ≤ f(σ)} ≤ 1 (1)
#{v
(p−1)
< σ
(p)
: f(v) ≥ f(σ)} ≤ 1 (2)
We observe immediately that, if f is a discrete Morse
function on K, then − f is not necessarily a discrete
Morse function on K. This fact is not true in the dif-
ferentiable case.
Definition 2 We say that a cell σ
(p)
is a critical cell
of f if and only if
MORPHOLOGY-BASED REPRESENTATIONS OF DISCRETE SCALAR FIELDS
139
#{τ
(p+1)
> σ
(p)
: f(τ) ≤ f(σ)} = 0
#{v
(p−1)
< σ
(p)
: f(v) ≥ f(σ)} = 0
(3)
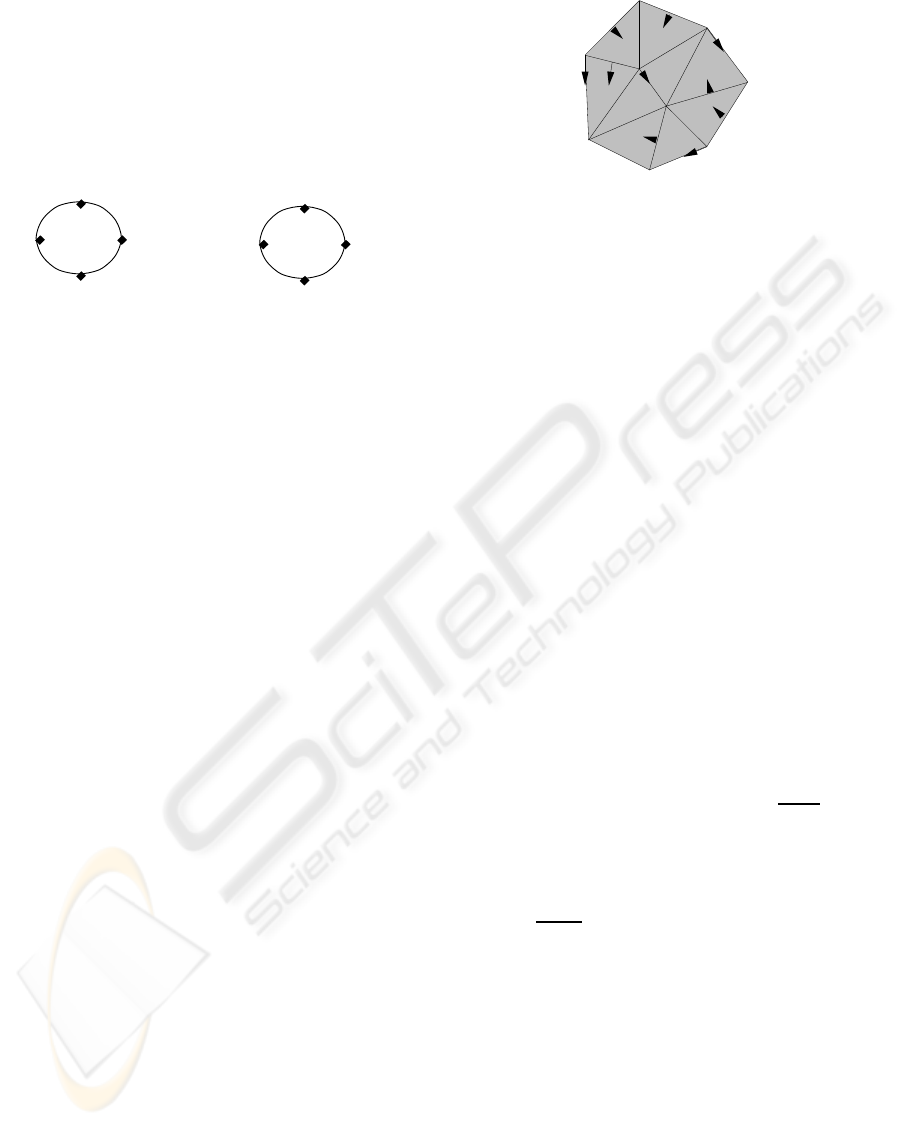
A simple example of a Forman function is given in in
Figure 3(a).
1
4
−1
3
3
1
−2
(b)
(a)
3
5
−2
4
4
5
4
−1
3
Figure 3: The function defined on the complex in (a) is a
Forman function, while the function defined on the complex
in (b) is not a Forman function (vertex of image 5 and edge
of image -2 violate conditions 2) .
The above definitions extend to a finite CW-
complex K. Forman has shown that inequalities
(1 & 2) cannot be equalities in the same time. This
means that, for discrete Morse functions, we cannot
find simultaneously a face v
(p−1)
and a co-face τ
(p+1)
of a cell σ
p
such that f(τ) ≤ f(σ) ≤ f(v). From the
abovedefinitions if K is regular then the absolute min-
imum of f should occur at a vertex and if the car-
rier of K has no boundary components then the ab-
solute maximum of f should occur at a maximal di-
mensional cell, see Figure 3(a).
In the literature the negative gradient vector field is
usually used instead of the gradient field. We will
stick to this convention and we will call the negative
gradient vector field simply the gradient vector field.
The (negative) gradient field indicates the steepest di-
rections in which the function decreases so that the
gradient flow is uniform. This idea has been used by
Forman to define a discrete gradient vector field for
discrete Morse functions. Forman has shown that crit-
ical cells and non critical cells are uniquely character-
ized by the discrete gradient vector field.
Let σ
(p)
be a cell in a regular complex K. If there
exists a cell τ
(p+1)
such that σ < τ and f(τ) ≤ f(σ),
then we draw a vector from σ to τ and we repeat thia
for all cells of K. The set of such vectors is the dis-
crete gradient vector field corresponding to Forman
function f . Obviously, the corresponding functional
definition is that, such a cell τ
p+1
is the image of σ
p
by a function φ. Relations (1, 2) imply that a cell can
be the tail or the end of at most one vector. From re-
lation (3), critical cells are not the tail nor the end of
a vector, see Figure 4 below. This property allows us
to recognize critical cells in a regular complex.
0
3
8
3
3
0
2
5
3
3
9
0
−2
1
9
4
5
4
−1
5
9
2
0
9
8
1
4
−1
9
1
5
0
3
8
−2
Figure 4: Illustration of a gradient vector field. Critical cells
are those which are not the tail nor the end of a vector.
5 SMALE-LIKE
DECOMPOSITION PROCESS
In (DeFloriani et al., 2002b), we have introduced an
algorithm that decomposes a d-dimensional triangu-
lated domain K associated wit
a scalar field f into a collection of pair-wise dis-
joint components. This decomposition is similar
to Thom-Smale’s decomposition in the differentiable
case. We have defined a discrete gradient vector field
that behaves on M like a differentiable gradient field.
Here, we recall the basic idea of this decomposition
and how to construct the corresponding discrete gra-
dient vector field. Without loss of generality, we as-
sume that f(u) 6= f(v) for all vertices u 6= v. This can
be obtained through a local perturbation of the scalar
field f. This condition ensures the uniqueness of the
decomposition. We maintain a current complex K
′
which is initialized to be equal to K. We consider
a vertex v in K
′
corresponding to the global maxi-
mum of f. The values of f at the vertices of St(v)
are thus less than f(v). In this step, we define the
componentC(v)corresponding to v to be
St(v). We set
∂C(v) := Lk(v). Then, for each top simplex γ in ∂C(v)
that is incident in another simplex (γ,w) in K
′
−C(v),
we compare the values of f at vertices of γ with f(w).
If f(w) is less than all of them, then we extendC(v) to
be C(v) ∪
(γ, w)and we replace γ in ∂C(v) by all faces
of cone (γ, w) that contain w.
We thus iteratively extendC(v) at each step to bound a
region on which f decreases. The process stops when
the region cannot be further extended while maintain-
ing the above property. At this point, we delete such
region from K
′
, and we repeat the process.
The result of the above algorithm is, thus, a decompo-
sition D of M into unstable components C
i
= C(v
i
),
each of which corresponds to a local maximum of f.
To reduce the number of components we add a merg-
ing step that merges two adjacent components C(v
i
)
and C(v
j
) if and only if v
i
or v
j
belongs to the bound-
ary of the component associated with it. An example
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
140

of this decomposition is shown in Figure 5 (a) for a
synthetic function and in Figure (b) for a real data set.
The decomposition algorithm described above al-
(a) (b)
Figure 5: In (a), Unstable decompositions of a synthetic
function f(x, y) = sinx+ siny representing the eggs plateau
surface. In (b), 119 unstable components produced by our
decomposition algorithm applied to a triangulation of the
Mount Marcy consisting of 69718 triangles.
lows us to define a discrete form of the gradient vec-
tor field for a scalar field f. A discrete (negative)
gradient vector field is defined by the following two
functions. A multi-valuedfunction φ which associates
each local maximum v, corresponding to a compo-
nent C(v) of M, with the top cells γ
′
in St(v) , i.e.,
φ(v) = {γ
′
: γ
′
is a top cell in St(v)}.
With each cell γ in C(v) − {∂C(v) ∪ St(v)}, which
has been used in the extension process, we associate
the added cones (γ, w
i
). Equivalently,the vertices (w
i
)
are sufficient to characterize this single-valued func-
tion which we denote by ψ. We have ψ((γ, w
i
)) =
{w
i
}. Functions φ and ψ define the discrete (nega-
tive) gradient vector field of f. As in the differen-
tiable case, it denotes the directions in which the func-
tion decreases, and characterizes the critical cells and
points. To obtain a geometric representation of func-
tions φ and ψ, we draw vectors from the initial vertex
v, to all top cells in St(v), and a vector from γ to the
cones (γ, w
i
) used in the decomposition process. We
obtain a collection of vectors that indicate the direc-
tions in which the scalar field is decreasing (cf., Fig-
ures 6).
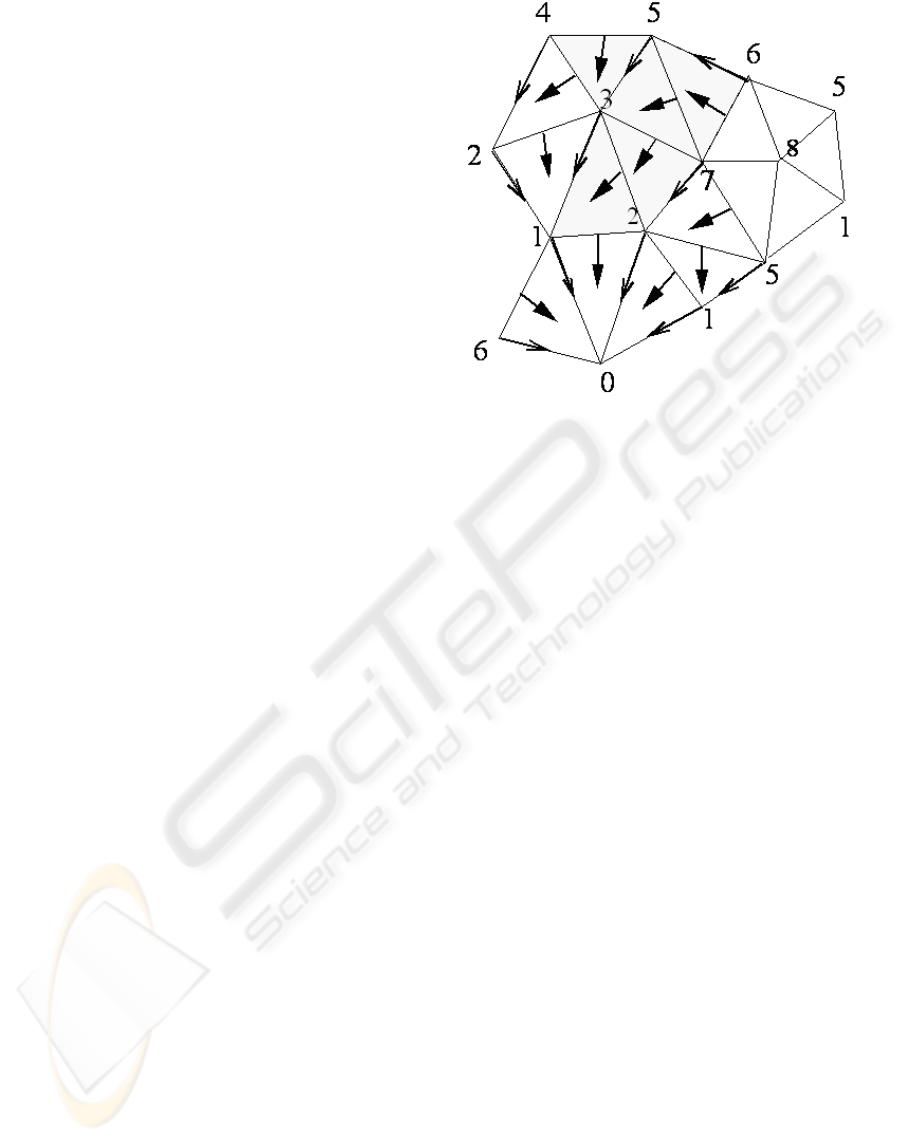
Referring to the example in Figure 6(a), we con-
sider the vertices at which the scalar field reaches its
maximum, which is equal to 8. We show the process
of growing the component. The shaded regions in
Figure 6(a) is the component associated with value
8. In Figure 6(b), we show the final decomposition
of the complex in 6(a) with its gradient vector field.
Each shaded region correspond to an unstable Smale
component.
6
7
1
2
5
3
1
8
4
3
1
5
7
6
7
(a)
6
7
1
2
5
3
1
8
4
3
1
5
7
7
6
(b)
Figure 6: In (a), the decomposition process of K: compo-
nent corresponding to the vertex with the field value equal
to 8 with its discrete gradient vector field. In (b), the fi-
nal components decomposing K and their discrete gradient
vector field.
6 EXTENDED GRADIENT FIELD
AND COMPATIBILITY WITH
FORMAN THEORY
In this Section, we prove that the discrete gradient
field obtained from our Smale-like decomposition of
a manifold M endowed with a scalar field f can be
extended so that a Forman function F is defined over
M. From this point of view, the scalar field f becomes
the restriction of F over the vertices of M, its gradient
vector field Grad f becomes a subfield of the gradient
vector field of F and the critical points of f are a sub-
set of critical cells of F.
In the construction process of the Smale-like decom-
position seen in Section 5, the expansion of compo-
nents C(v) begins by attaching to St(v), where v is a
local maximum, other cones (γ, w) where γ is a top
simplex in Lk(v) and f(w) is less than all values of
f over vertices of γ. Then function ψ associates, the
(n−1)-simplex, γ with vertex w. For each pair (γ, w),
function ψ can be extended, to a function
˜
ψ, over all
faces σ
i
of γ, with i = 0 to dim(γ)−1 = n−2 by asso-
ciating σ
i
with vertex w. Geometric equivalent exten-
sion consists of emanating vectors from all faces of γ
towards vertex w. This is compatible with our decom-
position process since f(w) < f(w
′
) for all vertices w
′
of γ, see Figure 7 below. Note that, according to this
construction, all faces of γ are not critical since they
are tails of vectors. Since a simplex cannot be the
tail and the end of a vector at the same time, then if
a simplex γ
′
= (σ
(n−2)
, w) is used to expand ∂C(v) in
the Smale-like decomposition process, the vector cor-
responding to
˜
ψ(σ
n−2
) has to be removed. This al-
ready characterizes a Forman function over all faces
of
C(v) − St(v).
Thus, the extended function
˜
ψ can be explicitly de-
fined by
• if γ is a (n − 1)-simplex expanding C(v) then
˜
ψ(γ) := ψ(γ) = {w}, such that (γ, w) expands
MORPHOLOGY-BASED REPRESENTATIONS OF DISCRETE SCALAR FIELDS
141
C(v).
• For all i-simplexes σ
i
∈ γ, with i = 0, . . ., n− 3 we
set
˜
ψ(σ
i
) := {w} if
˜
ψ(σ
i
) has not been defined
before when another (n− 1)-simplex γ incident is
σ
i
was considered. Otherwise, σ
i
is skipped since
it has already an attached value by
˜
ψ
• For i = n−2 and such that (σ
n−2
, w) does not par-
ticipate to the expansion process of C(v), we have
˜
ψ(σ
n−2
) = {w}.
• Otherwise
˜
ψ(σ
n−2
) =
/
0. In this case,
cone (σ
n−2
, w) represents a new ex-
panding (n − 1)-simplex of C(v) and
˜
ψ((σ
n−2
, w)) = ψ((σ
n−2
, w)). Then we re-
turn to the first point to define
˜
ψ over faces of
(σ
n−2
, w).
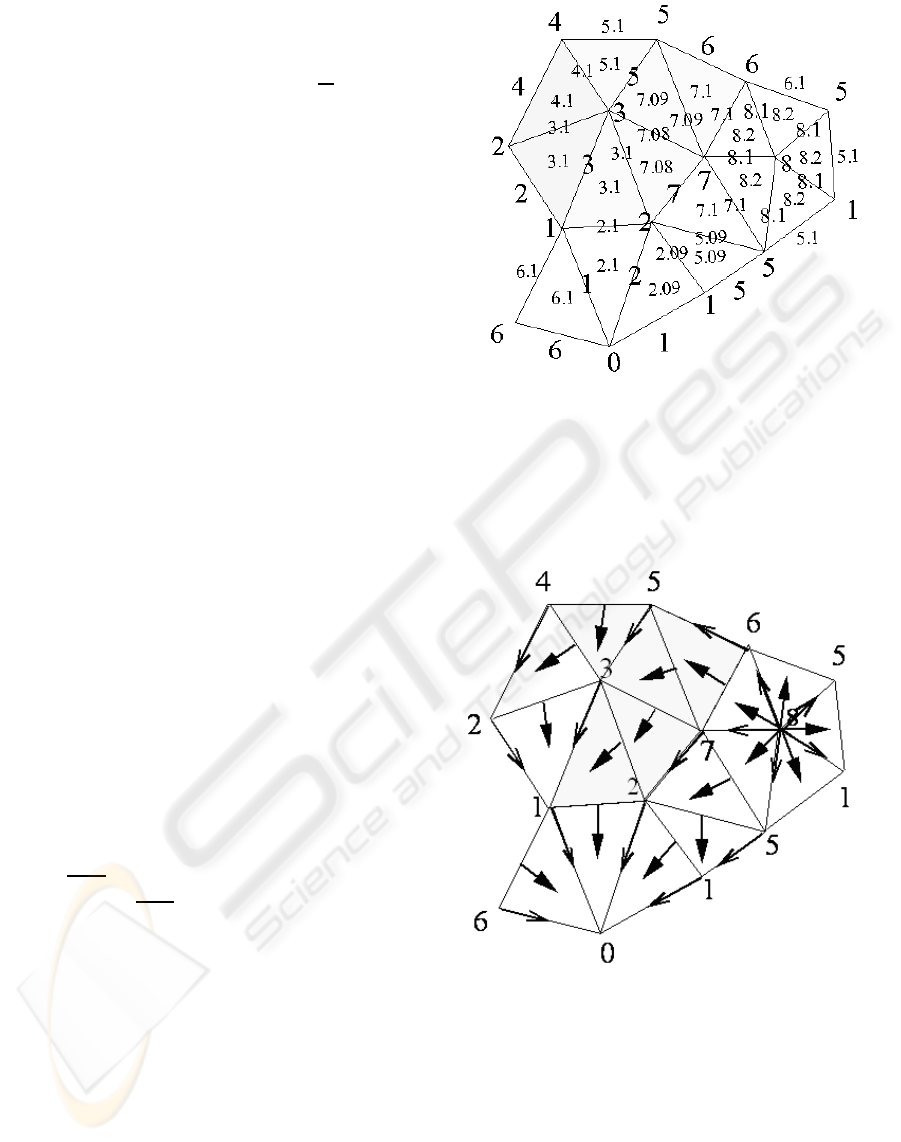
For simplicity, we present in Figure 7 the extended
gradient vector field for a 2-dimensional scalar field.
Simplexes γ are edges and their faces σ
i
are vertices
(i.e., we have only i = 0). Vectors emanating from
vertices towards edges are added if the edges do not
participate in the expansion process of the compo-
nent construction. For example, segment γ = [6;7]
expands C(8) by adding triangle ∆ labeled as 6, 7 and
5. Function ψ associates segment [6;7] with vertex
{5}. An arrow from [6;7] towards {5} is drawn. End
points of segment [6;7] are the (n− 2)-simplexes de-
scribed above. Cone (i.e., segment)(6, 5) does not
participate in the expansion of the new component
C(v) := C(v) ∪ ∆. Thus, function
˜
ψ(6) = {5} and a
vector emanating from {6} towards {5} is added to
edge [6;5]. The other vertex {7} of segment [6;7],
with vertex 5 forms an edge that expands the updated
C(v), then
˜
ψ(7) =
/
0 and no vector is emanating from
{7} towards {5} is drawn in triangle ∆. Note that
the same vertex {7} is revisited again when trian-
gle (7;3;2) is considered. Function
˜
ψ associates {7}
with {2} since edge [7;2] does not expand C(v). Ver-
tex {7} is revisited again a last time when triangle
(7;5;2) is considered. The process skips here ver-
tex {7} since it has already a non-empty value by
˜
ψ.
We see clearly that each simplex in the triangulation
emanates or receives at most one vector. Hence, the
extended gradient vector field is a Forman gradient.
Critical cells are those which are not the tail nor the
end of vectors. We have here only one (global) min-
imum {0} and the entire star St(8) as a singular cell
corresponding to the maximal value 8.
In the general case, function F is not uniaue and can
be defined in many ways. In the following, we present
an explicit construction of F. Let γ be a (n − 1)-
simplex expanding a component C(v) to C(v) ∪ {w}
and let σ
i
be a face of γ where i ∈ {1, . . . , n−1}. Sup-
pose that γ and its faces are visited for the first time.
Figure 7: Illustration of the extended gradient vector field
for a 2-dimensional scalar field. The extension here acts
only on vertices. Arrows are added to edges that do not
participate to the expansion process of componentC(v) with
f(v) = 8.
1. We set F(γ) := max{ f(v
′
) : v
′
is a vertex of γ} +
(n−1)ε, where ε is positive numberchosen so that
F(γ) < f(v). Then we define F(γ,w) := F(γ).
For faces (σ
i
)
n−2
i=0
, we set F(σ
i
) := max{ f(v
′
) :
v
′
is a vertex of σ
i
} + iε, for all i ∈ {1, . . . , n− 1}.
Note that for i = 0, simplexes σ
0
are simply ver-
tices of γ for which we have F(σ
0
) = f(σ
0
).
Let σ
i
be a face of another simplex σ
j
⊂
γ (i.e., i < j), then vertices of σ
i
are in-
cluded in the set of vertices of σ
j
. Hence
max{ f(v
′
) : v
′
is a vertex of σ
i
} ≤ max{ f(v
′
) :
v
′
is a vertex of σ
j
} and consequently F(σ
i
) <
F(σ
j
). This implies that faces of γ are set to be
critical at this definition step except γ from which
an arrow in emanated towards cone (γ,w).
2. For cones (σ
i
, w), we define F((σ
i
, w)) := F(σ
i
),
for all i ∈ {0, 1, . . ., n − 2}. This means that
from each face σ
i
we emanate an arrow towards
cone (σ
i
, w) This definition ensures that Forman
relations (1) and (2) are satisfied.
3. Now, for the expansion process of the up-
dated component C(v), (n− 1)-simplexes of type
(σ
n−2
, w) are considered. Let update γ to be equal
to (σ
n−2
, w). At this moment, γ and each of its
faces adjacent to w receive an arrow from a face
of σ
n−2
. We update then w to be the new added
point. Since γ is expanding component C(v) to
a new cone (γ, w), then new arrows will be em-
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
142
anated from faces of γ towards w. Hence, values
of faces of γ by F should be re-initialized to make
them, first, critical in C(v). To do that, we up-
date, first, value of ε to be equal ε −
ε
10
and then
we return to step (1.). Value of ε is updated for
the following reason. Simplex γ is adjacent to two
n− simplexes, the old cone (γ, w) ⊂ C(v) and the
new cone (γ, w) expanding C(v). Then, to pre-
serve Forman relations (1) and (2), value of γ by
F should be less then the value of the old cone
(γ, w).
Step (1.) defines F over (γ, w), γ and all its
faces. Values of vertices (i.e., 0-simplexes) are
preserved. We return, then to step (2.) to define
F over all faces of type (σ
i
, w). New arrows are
hence drawn from faces σ
i
to (σ
i
, w) and we go so
on. If a face is re-visited from another expanding
simplex then we assign to the simplex a value that
preserves Forman relations (1) and (2).
By a such construction Forman relations are satisfied
over all the simplexes of the complex.
The simplest way to extend f over St(v) is to con-
sider that all simplexes in the interior of St(v) are crit-
ical for F since they are the immediate neighbors of
v which is critical for f. We can define F for an i-
dimensional face α
i
of St(v) to be f(v)+iε. Relations
(3) are, thus, satisfied over all simplexes of St(v).
In Figure 8, we give an example of construction of
a Forman function that extends the scalar field f de-
scribed in Figure 7 with value ε = 0.1. The extended
function preserves Forman relations (1) and (2) and
corresponds to the above formulas defining F. Thus,
the function obtained in the example is a Forman
function.
Function
˜
φ describing the gradient vector field over
St(v) can be associated with the restriction of F over
St(v) and function
˜
ψ describing the gradient vector
field over
C(v) − St(v) can be associated with the re-
striction of F over C(v) − St(v).
Outside St(v), the extended gradient vector field fol-
lows, naturally, the decreasing growth of the function
f over the triangulation simplexes.
To keep the differentiability simulation of the ex-
tended gradient vector field over the entire domain,
we keep the geometric representation (by vectors) of
function φ over stars {St(v)} of local maxima {v}.
In order to be consistent with the extension
˜
ψ of ψ
over proper faces of simplexes γ, we extend func-
tion φ, to a function
˜
φ over all simplexes in St(v) by
emanating vectors from v towards all simplexes in-
cident to v. The extended function
˜
φ is defined by
˜
φ(v) = {γ
′
: γ
′
is a simplex in St(v)}.
In Figure 9, we show the representation of both
˜
φ and
Figure 8: Definition of a Forman function that extends the
scalar field over all simplexes and that corresponds to the
extended gradient vector field described in Figures 7 and 9
with value ε = 0.1.
˜
ψ for the same scalar field represented in Figure7.
Figure 9: General representation of the extended gradient
vector field for a 2-dimensional scalar field over all the tri-
angulated domain.
7 CONCLUDING REMARKS
Here, we have presented an extended form of a dis-
crete gradient vector field associated with a Smale-
like decomposition in order to define a Forman func-
tion compatible with the decomposition. A Smale-
MORPHOLOGY-BASED REPRESENTATIONS OF DISCRETE SCALAR FIELDS
143

like decomposition simulates well the differentiable
case. Thus, we obtain a good representative of a dis-
crete gradient field that combines properties of both
smooth Morse and discrete Forman theories. In our
future work, we are planning to implement processes
for two- and three-dimensional scalar fields in order
to apply them on real image processing data bases.
We will apply the Forman simplification meshes and
its compression process to our extended gradient field
in order to define multi-resolution approach based on
both Morse and Forman theory.
Since the algorithm is dimension-independent, a fur-
ther developmentof this work consists of applying the
approach for clustering .
ACKNOWLEDGEMENTS
This work has been partially supported by a grant of
the Polytechnic University of Valencia, Spain (”Pro-
grama de Apoyo a la Investigacion y Desarrollo
2006”) and by the National Science Foundation un-
der grant CCF-0541032, by the MIUR-FIRB project
SHALOM under contract number RBIN04HWR8, by
the MIUR-PRIN project on ”Multi-resolution model-
ing of scalar fields and digital shapes” and by the Eu-
ropean Network of Excellence AIM@SHAPE under
contract number 506766.
REFERENCES
Agoston, M. (1976). Algebraic Topology, A First Course,.
Pure and Applied Mathematics, Marcel Dekker.
Bajaj, C. L., Pascucci, V., and Shikore, D. R. (1998). Visu-
alization of scalar topology for structural enhacement.
In Proceedings of the IEEE Conference on Visualiza-
tion ’98 1998, pages 51–58.
Bajaj, C. L. and Shikore, D. R. (1998). Topology preserv-
ing data simplification with error bounds. Journal on
Computers and Graphics, 22(1):3–12.
Danovaro, E., De Floriani, L., and Mesmoudi, M. M.
(2003). Topological analysis and characterization of
discrete scalar fields. In Asano, T., Klette, R., and
Ronse, C., editors, Theoretical Foundations of Com-
puter Vision, Geometry, Morphology, and Computa-
tional Imaging, volume 2616 of Lecture Notes on
Computer Science, pages 386–402. Springer Verlag.
DeFloriani, L., Mesmoudi, M. M., and Danovaro, E.
(2002a). Extraction of Critical Points and Nets Based
on Discrete Scalar Fields. In To appear In Proceed. of
Eurographics conference.
DeFloriani, L., Mesmoudi, M. M., and Danovaro, E.
(2002b). Smale-like Decomposition for Discrete
Scalar Fields. In To appear In Proceed. of Inter. Conf.
on Pattern Recognition.
Edelsbrunner, H., Harer, J., and Zomorodian, A. (2001).
Hierarchical morse complexes for piecewise linear 2-
manifolds. In Proc 17th Sympos. Comput. Geom.,
pages 70–79.
Forman, R. (1998). Morse Theory for Cell Complexes. Ad-
vances in Mathematics, 134:90–145.
J.Toriwaki and Fukumura, T. (1975). Extraction of struc-
tural information from grey pictures. Computer
Graphics and Image Processing, 7:30–51.
Lewiner, T., Lopes, H., and Tavares, G. (2002a). Opti-
mal discrete morse functions for 2-manifolds. Techni-
cal report, Pontificia Universidade Catolica do Rio de
Janero.
Lewiner, T., Lopes, H., and Tavares, G. (2002b). Visualiz-
ing forman’s discrete vector field. In H.-C. Hege, K.
P. E., editor, to appear in Proceed. of Mathematical
Visualization III, Springer.
Milnor, J. (1963). Morse Theory. Princeton University
Press.
Nackman, L. R. (1984). Two-dimensional critical point
configuration graph. IEEE Transactions on Pattern
Analysisand Machine Intelligence, PAMI-6(4):442–
450.
Peucker, T. K. and Douglas, E. G. (1975). Detection of
surface-specific points by local paprallel processing
of discrete terrain elevation data. Graphics Image
Processing, 4:475–387.
Smale, S. (1960). Morse inequalities for a dynamical
system. Bulletin of American Mathematical Society,
66:43–49.
Thom, R. (1949). Sur une partition en cellule associ´ees a
une fonction sur une vari´et´e. C.R.A.S., 228:973–975.
Watson, L. T., Laffey, T. J., and Haralick, R. (1985). Topo-
graphic classification of digital image intensity sur-
faces using generalised splines and the discrete cosine
transformation. Computer Vision, Graphics and Im-
age Processing, 29:143–167.
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
144
