
COMPARISON OF BACKGROUND SUBTRACTION METHODS
FOR A MULTIMEDIA LEARNING SPACE
F. El Baf, T. Bouwmans and B. Vachon
Laboratory LMA, University of La Rochelle, Avenue M. Crépeau, La Rochelle, France
Keywords: Multimedia Application, Video Processing, Background Subtraction.
Abstract: This article presents, at a first time, a multimedia application called Aqu@theque. This project consists in
elaborating a multimedia system dedicated to aquariums which gives ludo-pedagogical information in an
interactive learning area. The reliability of this application depends of the segmentation and recognition
steps. Then, we focus on the segmentation step using the background subtraction principle. Our motivation
is to compare different background subtraction methods used to detect fishes in video sequences and to
improve the performance of this application. In this context, we present a new classification of the critical
situations which occurred in videos and disturbed the assumptions made in background subtraction
methods. This classification can be used in any application using background subtraction like video
surveillance, motion capture or video games.
1 INTRODUCTION
The proposed system allows a visitor of an aquarium
to select on an interactive interface fishes that are
filmed on line by a remote video camera (Figure 1).
This interface is a touch screen divided into two
parts. The first one shows the list of fishes present in
the tank and is useful all the time, independently of
the video produced by the camera. The filmed scene
is visualized in the remaining part of the screen. The
computer can supply information about fishes
selected by the user with his finger. A fish is then
automatically identified and some educational
information about it is put on the screen. The user
can also select each identified fish whose virtual
representation is shown on another screen. This
second screen is a virtual tank reproducing the
natural environment where the fish lives in presence
of it preys and predators. The behavior of every fish
in the virtual tank is modeled. The project is based
on two original elements: the automatic detection
and recognition of fish species in a remote tank of an
aquarium and the behavioral modeling of virtual
fishes by multi-agents methods. First, we present the
principle and the different steps met in this
multimedia application called Aqu@theque. In a
second step, we will present a new classification of
the critical situations met in videos and our study of
statistical background subtraction algorithms in the
context of this multimedia application.
Figure 1: Aqu@theque interactive learning space.
2 AN INTERACTIVE LEARNING
SPACE: THE AQU@THEQUE
APPLICATION
In this section, we present the principle of this
interactive learning space. More information can be
found in our previous papers (Semani, SPR 2002),
(Semani, IVRCIA 2002), (Desfieux, IVRCIA 2002).
The system integrates three different functional
blocks:
The interactive part, with an interface drawn
with Macromedia Director, and using a touch
screen;
The recognition system;
153
El Baf F., Bouwmans T. and Vachon B. (2007).
COMPARISON OF BACKGROUND SUBTRACTION METHODS FOR A MULTIMEDIA LEARNING SPACE.
In Proceedings of the Second International Conference on Signal Processing and Multimedia Applications, pages 149-154
DOI: 10.5220/0002134201490154
Copyright
c
SciTePress

The 3D real-time engine, coupled with a
mechanism of behavior modeling;
2.1 Fish Identification
Video stream, issued from the camera which films in
live the fish tank, is integrated into the interface
(figure 2) leaving the possibility to the user to:
Make action (move, zoom ...) in real time, on
the video stream;
Select a fish on the touch screen;
Select it by its name in the menu;
Create his virtual tank;
This functionality was written in Lingo language
(the language script of Director).
2.2 Fish Recognition
When a fish is selected on the touch screen, the
recognition system is launched.
To allow a real-time and automatic fish recognition,
our system consists of:
A segmentation step allowing the extraction of
the main regions corresponding to fishes in
video sequences. This step uses a background
subtraction method;
A features extraction step based on
segmentation’s results;
A classification step of fishes with respect to
the different species which are present in the
tank;
More information can be found in our previous
papers (Semani, SPR 2002), (Semani, IVRCIA
2002).
2.3 Information about Identified Fishes
If the chosen fish is well identified, the user can
choose by mean of the interface to reach the
following information:
Educational information: multimedia
information about the selected fish is proposed
to the user. This information is given in the
form of indexed pedagogic cards (Figure 2),
pictures, real videos on the way of life, the
origin and the environment of animals as well
as their protection. The educational
information is accessible by menu, conceived
with the same hierarchy for all the species
(hierarchical menu from subjects as the
biology, the species, its protection, the
behavior, the environment...);
3D representation: the chosen fish can also be
represented in 3D under all the angles (with
zoom, rotations...), thanks to computer
generated images and the technology cult3D.
The user can then manipulate it in order to
observe all its details (Figure 3).
Figure 2: Educational information.
Figure 3: The virtual Porkfish.
2.4 Virtual Tank
The user can build up his virtual fish tank which
manages the behavior of each fish. More details can
be found in (Desfieux, IVRCIA 2002).
2.5 Discussion
The fish identification is the main step of the
Aqu@theque application because it determines its
reliability. Furthermore, this step must be in real
time as much as possible because the user must have
to wait as less as possible to know the specie’s name
of the selected fish. In the following, we present our
study to perform the segmentation step which uses
the background subtraction principle.
3 COMPARISON OF
BACKGROUND
SUBTRACTION METHOD
The automatic detection of fish species is made
using background subtraction technique based on the
difference between the current frame and a
background reference frame. In the previous work
(Semani, SPR 2002) (Semani, IVRCIA 2002), the
background was modeled by a median but this
model fails in some critical situations met in aquatic
scene. So it should be necessary to study these
situations to handle their effects. But before, we
SIGMAP 2007 - International Conference on Signal Processing and Multimedia Applications
154

propose a general classification of the critical
situations which may appear in any video and then
we focus on the critical situations occurred in the
case of aquatic scenes. After that, we compare and
evaluate three background subtraction algorithms
which are more sophisticated than the median. This
algorithm are the following: Single Gaussian (Wren,
1997), Mixture of Gaussians (Stauffer, 1999) and
Kernel Density Estimation (Elgammal, 2000).
3.1 Assumptions and Critical
Situations
There are three main assumptions which assure a
good functioning of the background subtraction
methods: the camera is fixed, the illumination is
constant and the background is static, i.e pixels have
a unimodal distribution and no background objects
are moved or inserted in the scene. In these ideal
conditions, background subtraction gives good
results. In practice, some critical situations may
appear and perturb this process. In (Toyama, 1999),
the author identifies 10 critical situations in the field
of the video surveillance. To be more general, we
explain and improve this classification in a most
possible abstract way and gives examples naturally
in the fields of video surveillance but in more in the
fields of motion capture and multimedia
applications. In final, we identify 13 critical
situations (CS) which are the following:
CS1 - Noise image due to a poor quality
image source;
CS2-1 - Camera jitter;
CS2-2 - Camera automatic adjustments: Many
modern cameras have auto focus, automatic
gain control, automatic white balance and
auto brightness control;
CS3 - Gradual illumination changes: It can be
illustrated by illumination change during a day
in an outdoor scene;
CS4 - Sudden illumination changes: It can be
illustrated by a light switch in an indoor scene;
CS5 - Bootstrapping: During the training
period, the background is not available in
some environments;
CS6 - Camouflage: A foreground object’s
pixel characteristics may be subsumed by the
modeled background;
CS7 - Foreground aperture: When a moved
object has uniform colored regions, changes
inside these regions may not be detected.
Thus, the entire object may not appear as
foreground;
CS8 - Moved background objects: A
background object can be moved. These
objects should not be considered part of the
foreground;
CS9 - Inserted background objects: A new
background object can be inserted. These
objects should not be considered part of the
foreground;
CS10 - Movement in the background:
Backgrounds can vacillate and this requires
models which can represent disjoint sets of
pixel values. For example:
- Waving trees, moving bushes in outdoor
scene for video surveillance application
(Toyama, 1999).
- Ocean waves in outdoor scene for video
marine surveillance application (Culibrk,
2007).
- Moving algae in aquatic scene for
Aqu@theque (Semani, 2002).
In this case, the background is multimodal and
dynamic (Stauffer, 1999) (Elgammal, 2000).
CS11 - Beginning moving foreground object:
When an object initially in the background
moves, both it and the newly revealed parts of
the background called ghost are detected. For
example:
- A person or a car begins to move in a video
surveillance application (Toyama, 1999);
- A fish begins to move in the Aqu@theque
application (Semani, 2002);
CS12 - Sleeping foreground object: A
foreground object that becomes motionless
cannot be distinguished from a background
object and then it will be incorporated in the
background;
- A person or a car stops to move for video
surveillance application (Toyama, 1999);
- A fish stops to move for Aqu@theque
(Semani, 2002).
This critical situation depends of the context.
Indeed, in some applications, motionless
foreground object must be incorporated
(Huerta, 2006) and in others no (Semani,
2002).
CS 13 – Shadows: Shadows can be detected as
foreground. A complete study on shadow
detection can be found in (Cucchiara, 2003);
In aquatic scenes, all these situations occurred. For
example, illumination changes (CS3, CS4) in
aquatic scenes are owed to the ambient light, the
spotlights which light the tank from the inside and
from the outside, the movement of the water due to
fish and the continuous renewal of the water.
COMPARISON OF BACKGROUND SUBTRACTION METHODS FOR A MULTIMEDIA LEARNING SPACE
155

These illumination changes can be local or
global following their origin. Furthermore, the
constitution of the aquarium (rocks, algae) and the
texture of fishes amplify the consequences of the
brilliant variations.
So, the statistical background subtraction
methods tested in the following section must deal
specifically with these critical situations.
3.2 Statistical Background Subtraction
Algorithms
3.2.1 Single Gaussian (SG)
Wren (Wren, 1997) developed an algorithm to
model each background pixel according to normal
distribution characterized by its mean value µ and its
standard deviation
σ
in the YUV color space.
This model requires a number t of frames to
compute µ and
σ
in each color component:
()
()
∑
=
=
t
i
t
iyxp
tyx
1
,,
,,
μ
()
()
()
⎟
⎠
⎞
⎜
⎝
⎛
−=
∑
=
t
i
tyx
t
iyxp
sqrttyx
1
,,²
,,²
,,
μσ
where
()
iyxp ,,
is the current intensity value of
the pixel at the position (x,y) at time i. After that a
pixel is considered as belonging to a foreground
object according to the rule:
()() ()
tyxctyxptyx ,,.,,,,
σμ
>−
where c is a certain constant.
This method adapts to indoor scene with little
gradual illumination changes (CS3) but it fails in
several cases: sudden illumination changes (CS4)
and moving background objects like trees, flags or
algae (CS10).
3.2.2 Mixture of Gaussians (MOG)
It was proposed in (Stauffer, 1999) that the colors of
each background pixel are modeled by a mixture of
K Gaussians, which is given by the following
formula in the multidimensional case:
()
()
∑
=
∑=
K
j
jjtjjt
xfx
1
,;.Pr
μω
()
()
()()
⎟
⎟
⎟
⎠
⎞
⎜
⎜
⎜
⎝
⎛
⎟
⎠
⎞
⎜
⎝
⎛
−∑−−
∑
=
−
=
∑
jtj
T
jt
j
p
K
j
jt
xxx
μμ
π
π
..
2
1
exp
2
1
.Pr
1
2
1
2
1
A pixel matches a Gaussian if:
(
)
(
)
(
)
δμμ
<−∑−
−
jtj
T
jt
xxsqrt ..
1
To handle multimodality in the background
(CS10), Stauffer used as criterion the ratio
2
1
jjj
r ∑=
ω
, which supposes that a background
pixel corresponds to a high weight with a weak
variance due to the fact that the background is more
present than moving objects and that its value is
practically constant. The foreground detection is
made by ordering the K distributions by their
j
r
and
the first B Gaussians which exceed certain threshold
T are retained for the background:
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
>
∑
∑
=
=
T
K
i
ti
b
i
ti
b
1
,
1
,
minarg
ω
ω
The MOG deals with lighting changes (CS3),
multimodal background with low frequency
variations (CS10), moved background objects (CS8)
and sleeping foreground objects (CS12) but still
sensitive to the initialization of the parameters
(
0
μ
,
0
∑
) and to their estimation at each step.
3.2.3 Kernel Density Estimation (KDE)
Elgammal (Elgammal, 2000) estimated the
probability density function for each pixel color
using the kernel estimator K (Gaussian kernel) for N
recent sample of intensity values as:
() ()
∑
=
−=
N
i
itt
xxK
n
x
1
1
Pr
The foreground detection is done according the
following rule: If
(
)
Thx
t
<
Pr
, the pixel is belonging
to the foreground else is belonging to the
background.
Like the Mixture of Gaussians, the Kernel
Density Estimation is also adapted to handle the
multimodality of the background (CS10) but, unlike
the Mixture of Gaussians, it adapts very quickly to
high frequency variations in the background, and it
doesn't need to estimate the parameters of the
gaussians because it makes any assumption about
the form of the underlying distributions. In the
following section, we compare these three methods.
4 PERFORMANCE EVALUATION
The three algorithms were implemented using
OpenCV. The MOG’s algorithm used is the one
proposed by KaewTraKulPong (KaewTraKulPong,
2001) which is an improved algorithm of (Stauffer,
1999). For the three algorithms, post processing is
where
j
ω
is a weight associated to the jth Gaussian,
with mean
j
μ
and covariance
j
∑
, according to the time
proportion of colors appearance
SIGMAP 2007 - International Conference on Signal Processing and Multimedia Applications
156
used to eliminate isolated pixels corresponding to
false positive detection. To evaluate the performance
of the statistical background subtraction algorithms,
we have made first a qualitative performance
evaluation to evaluate the impact of the choice on
the user’s waiting. Indeed, this criterion is important
because the system must give the identification in
quasi real time. After, we made a quantitative
evaluation to evaluate the performance in term of
quality of the segmentation. In the section 4.3, we
discuss the results of the qualitative and quantitative
evaluation.
4.1 Qualitative Evaluation
Performance evaluation contains several senses.
Performance evaluation can be required in term of
time consuming and memory consuming or in terms
of how well the algorithm detects the targets with
less false alarms. To evaluate performance in the
first sense, the time and the memory used can be
measured easily by instruction in line code. A first
qualitative comparison is showed in the Table 1.
Table 1: Qualitative comparison.
SG MOG KDE
Speed Fast Intermediate Slow
Memory Intermediate Intermediate High
Because of the KDE is too slow and the need of
the treatment speed is essential, we will thus neglect
the KDE in the quantitative evaluation.
4.2 Quantitative Evaluation
After experimenting in the previous section, the
KDE seemed to be too slow for the application, so
we decide to evaluate quantitatively the SG and the
MOG. The sequence image used is Aqu@theque
sequence and contains 2600 images of size 640*480
in RGB. The results obtained are shown in the
Figure 4.
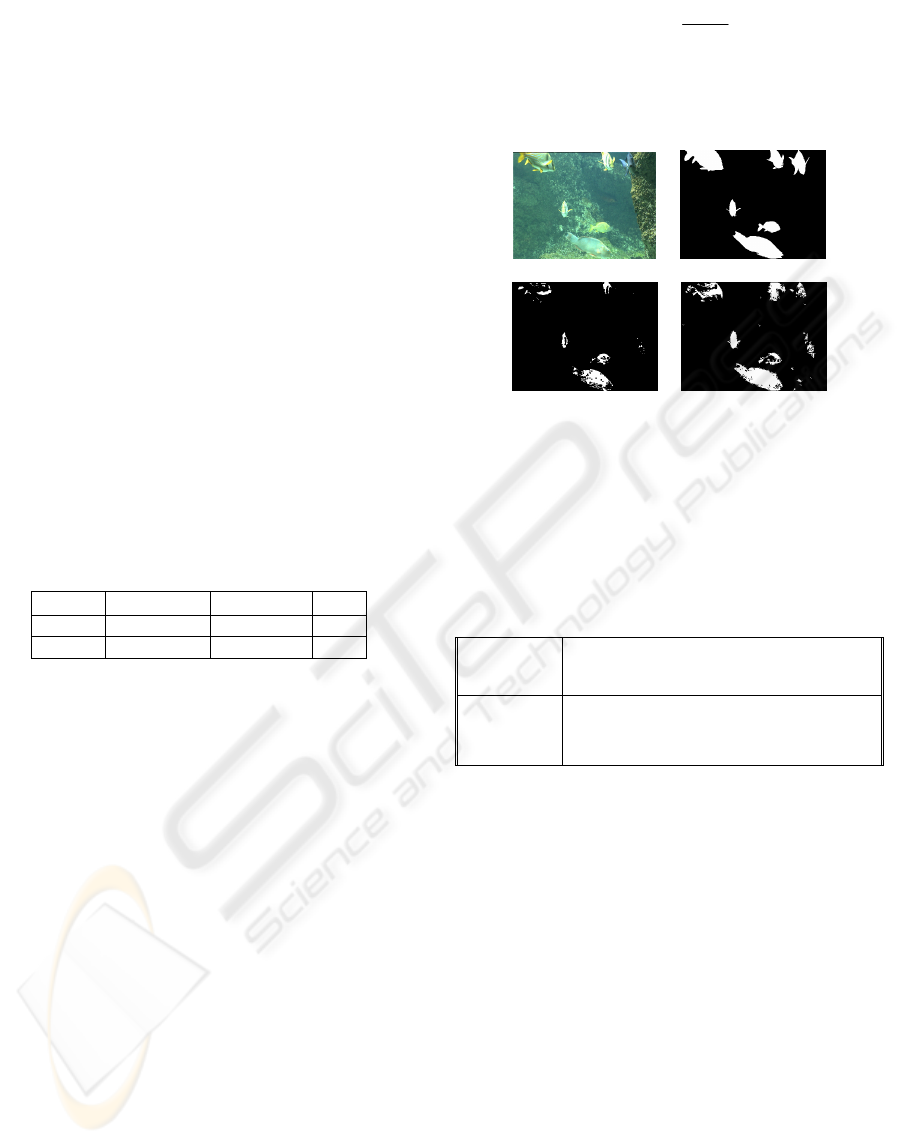
The evaluation of these two methods has been done
quantitatively by the sense of ROC (Receiver
Operating Characteristic) Analysis, and by a
measurement presented by Li (Li, 2004) from the
comparison of the segmentation results with the
“ground truths”. Roc evaluation is centralized
around the tradeoff of miss detection rate (FNR) and
false alarm rate (FPR), where the similarity measure
of Li integrates the false positive and negative errors
in one measure. Let A be a detected region and B be
the corresponding ground truth, the similarity
between A and B is defined as
B
A
BA
BAS
∪
∩
=),(
S(A,B) lies between 0 and 1. If A and B are the same,
S(A,B) approaches 1, otherwise 0 if A and B have the
least similarity. The ground truths are marked
manually.
a) b)
c) d)
Figure 4: a) Image 201, b) Image Ground Truth, c) SG -
Foreground Mask and d) MOG - Foreground Mask.
The evaluation results are shown in Table 2,
which reveals that the best results are obtained for
the MOG when K=3 Gaussians.
Table 2: Quantitative evaluations using the S(A,B)
measure and Roc analysis.
SG MOG (k=5) MOG (k=3)
FPR
0.0005 0.0068 0.007
FNR
0.6419 0.4001 0.3683
Similarity
0.3564 0.5710 0.6004
4.3 Discussion
The qualitative evaluation shows that the SG and the
MOG offer good performance in time consuming
and memory requirement. The KDE algorithm is too
slow for the application and requires too much
memory. The quantitative evaluation shows that the
MOG gives better results than the SG. Then, the
MOG is revealed to be the method which is the most
adapted between the three compared methods to the
Aqu@theque application.
5 CONCLUSION
The Aqu@theque project enhances the visit of an
aquarium by providing an interactive learning space
where educational information is available. A user
creates dynamically a virtual aquarium according to
COMPARISON OF BACKGROUND SUBTRACTION METHODS FOR A MULTIMEDIA LEARNING SPACE
157

the selected fishes on the interface. Aqu@theque
brings to the visitor an additional dimension by
allowing him to become an actor instead of staying a
passive spectator.
In this paper, we addressed particularly the
problem of background subtraction which is the one
of the key steps in the system. First, we identified
the critical situations met in video and improved the
classification made by (Toyama, 1999).
This classification can be used in any application
which uses background subtraction like video
surveillance, motion capture or video games. In a
second step, we made a comparison between three
statistical background subtraction methods in the
context of video sequence acquired from aquatic
scenes.
A first qualitative evaluation showed that the
MOG is more efficient, without adding time to the
user’s request. Quantitative tests confirm that the
MOG enhance the percentage of detection. So, the
recognition was improved and the performance of
our interactive learning space too. In the future, we
can test more background subtraction methods and
make sophisticated evaluation using ROC Curves
and the PDR method developed by Kim (Kim, 2006)
on sequences test of the VSSN 2006 (VSSN, 2006).
Furthermore, the principle of Aqu@theque can
be used in any multimedia environments that need
this type of interaction. The background subtraction
method must be chosen according to the critical
situations met in the sequence used in the
application.
REFERENCES
Semani D., Saint-Jean C., Frélicot C., Bouwmans T.,
Courtellemont P., January 2002, Alive Fish species
characterization for on line video-based recognition,
Proceeding of the SPR 2002, Windsor, Canada, pages
689-698.
Semani D., Bouwmans T., Frélicot C., Courtellemont P.,
July 2002, Automatic Fish Recognition in Interactive
Live Videos, Proceeding of the IVRCIA 2002, volume
XIV, Orlando, Florida, pages 94-99.
Desfieux J., Mascarilla L., Courtellemont P., 2002,
Interactivity and Educational Information in Virtual
Real-Time 3D Videos, Proceeding of the IVRCIA
2002.
Wren C., Azarbayejani A., Darrell T., Pentland A., , July
1997, Pfinder : Real-Time Tracking of the Human
Body, IEEE Transactions on Pattern Analysis and
Machine Intelligence, Volume 19, No. 7, pages 780 –
785.
Stauffer C., 1999, Adaptive background mixture models
for real-time tracking, Proceedings IEEE Conference
on Computer Vision and Pattern Recognition, pages
246-252.
Elgammal A., Harwood D., Davis L., June 2000, Non-
parametric Model for Background Subtraction, 6th
European Conference on Computer Vision 2000,
Dublin, Ireland.
Toyama K., Krumm J., Brumitt B., 1999, Wallflower:
Principles and Practice of Background Maintenance,
Proceedings of the International Conference on
Computer Vision 1999, pages 255-261.
Cucchiara R., Grana C., Piccardi M., Prati A. , 2003,
Detecting Moving Objects, Ghosts and Shadows in
Video Streams", IEEE Transactions on Pattern
Analysis and Machine Intelligence 2003, volume 25,
no 10, pages 1337-1342, 2003.
Culibrk D., Socek D. , Marques O., Furht B., March 2007,
Automatic kernel width selection for neural network
based video object segmentation, VISAPP 2007,
Barcelona, Spain.
KaewTraKulPong P., Bowden R., September 2001, An
Improved Adaptive Background Mixture Model for
Real-time Tracking with Shadow Detection,
Proceedings 2nd European Workshop on Advanced
Video Based Surveillance Systems, AVBS 2001,
Kingston, UK.
Kim K., Chalidabhongse T., Harwood D., Davis L. , 2006,
PDR: Performance Evaluation Method for
Foreground-Background Segmentation Algorithms,
EURASIP Journal on Applied Signal Processing.
Huerta I., Rowe D., Gonzàlez J., Villanueva J., October
2006, Improving Foreground Detection for Adaptive
Background Segmentation, First CVC Internal
Workshop on the Progress of Research and
Development (CVCRD 2006).
VSSN 2006 - Algorithm Competition in
Foreground/Background Segmentation:
http://www.imagelab.ing.unimo.it/vssn06/.
SIGMAP 2007 - International Conference on Signal Processing and Multimedia Applications
158
