
CHANGE DETECTION AND BACKGROUND UPDATE
THROUGH STATISTIC SEGMENTATION FOR TRAFFIC
MONITORING
T. Alexandropoulos, V. Loumos and E. Kayafas
Multimedia Technology Laboratory, National Technical University of Athens, 9 Heroon Polytechneiou, Athens, Greece
Keywords: Highway Surveillance, Traffic Monitoring, Background Update, Change Detection.
Abstract: Recent advances in computer imaging have led to the emergence of video-based surveillance as a
monitoring solution in Intelligent Transportation Systems (ITS). The deployment of CCTV infrastructure in
highway scenes facilitates the evaluation of traffic conditions. However, the majority of video-based ITS
are restricted to manual assessment and lack the ability to support automatic event notification. This is due
to the fact that, the effective operation of intelligent traffic management relies strongly on the performance
of an image processing front end, which performs change detection and background update. Each one of
these tasks needs to cope with specific challenges. Change detection is required to perform the effective
isolation of content changes from noise-level fluctuations, while background update needs to adapt to time-
varying lighting variations, without incorporating stationary occlusions to the background. This paper
presents the operation principle of a video-based ITS front end. A block-based statistic segmentation
method for feature extraction in highway scenes is analyzed. The presented segmentation algorithm focuses
on the estimation of the noise model. The extracted noise model is utilized in change detection in order to
separate content changes from noise fluctuations. Additionally, a statistic background estimation method,
which adapts to gradual illumination variations, is presented.
1 INTRODUCTION
The continuous development in computer imaging
technology has resulted in the adoption of video-
based surveillance as a monitoring solution in
Intelligent Transportation Systems. The video-based
approach to traffic monitoring suggests the
utilization of CCTV infrastructure for the
surveillance of highway scenes by human operators.
Video monitoring, as a non-intrusive approach,
allows the easy and secure installation of monitoring
infrastructure and facilitates the repositioning of the
equipment when needed.
A video-based ITS provides visual information
to a human operator, who is responsible for traffic
condition assessment. Depending on the observed
conditions, the operator selects an appropriate course
of action. Some decision examples include the
adjustment of top speed limits, depending on the
present traffic congestion, or the notification of
emergency medical services, in the case on an
accident.
Most installed video-based highway surveillance
systems restrict to visualization purposes, that is,
traffic conditions and events are assessed manually
by the operator. However, the ongoing advances in
computer processing speed have increased the
interest for the expansion of video surveillance
capabilities to the level where intelligent event
detection and notification features are supported.
The operation of an ITS as an autonomous
decision support system relies strongly on the
effective operation of a front end which executes
machine vision algorithms, in order to perform
feature extraction. In video-based ITS, the term
“feature extraction” refers to the detection of the
regions, which are likely to generate traffic events.
Apparently, in a traffic surveillance scene, these
regions consist of virtually every present target,
including vehicles and pedestrians.
In the present problem, it is convenient to
assume a static background and compare it against
successive frames, in order to track the emergence of
targets of interest. Therefore, feature extraction is
treated as a change detection problem. The
261
Alexandropoulos T., Loumos V. and Kayafas E. (2007).
CHANGE DETECTION AND BACKGROUND UPDATE THROUGH STATISTIC SEGMENTATION FOR TRAFFIC MONITORING.
In Proceedings of the Second International Conference on Signal Processing and Multimedia Applications, pages 257-264
DOI: 10.5220/0002134802570264
Copyright
c
SciTePress

performance of a video-based ITS front end depends
on the joint operation of two operations: change
detection and background update.
All imaging devices introduce inter-frame
variations due to sensor noise. Thus, direct frame
differencing fails to provide accurate results as a
change detection method. In general, change
detection demands the utilization of methods which
separate optimally content changes from noise-level
fluctuations.
In addition, although a static background is
assumed, its appearance exhibits intensity variations
due to gradual changes in lighting conditions. In
highway scenes, an apparent factor that causes
alterations in the background scene is the influence
of daylight variations. This fact dictates the use of a
background update method, which adapts to the
present lighting conditions, without incorporating
occlusions to the background model.
The present paper analyzes the operation of a
video-based ITS front end which performs feature
extraction in the image domain. In detail, the paper
is structured as follows. In Section 2, a block-based
clustering procedure, which performs noise model
estimation, is presented. In Section 3, a statistic
change detection method which takes into account
the noise model information is analyzed. In Section
4, an algorithm which performs background model
adaptation to gradual illumination variations is
presented. In the end, a short discussion analyzes
further development plans on the architecture of the
proposed system.
2 NOISE MODEL ESTIMATION
Feature extraction in traffic surveillance is feasible
through the application of change detection. A
highway frame, which is free of occlusions, can be
selected as reference. The change detection method
is responsible for the detection of occlusions on the
surveyed scene. This is performed through
comparison of subsequent frames against the
reference frame. The operator can restrict the feature
extraction process by specifying a region of interest
or even multiple regions of interest. The latter case
applies when the operator is interested in the
inspection of each highway lane individually.
Since change detection requires the existence of
a reference frame, there is the need to ensure its
availability. The background frame may either be
selected manually or be created by applying
temporal median to a training video sequence
(Massey, 1996). In the latter case, manual
verification is suggested, in order to ensure that no
static occlusions have been erroneously incorporated
to the background model.
An algorithm which performs change detection
needs to cope with the noise effect. Noise is an
inherent characteristic which is present in every
image acquisition sensor and introduces inter-frame
variations even in “unchanged” scenes. This fact
precludes direct differencing and requires the use of
a technique that separates content changes from
noise-level fluctuations. Obviously, content changes
and noise variations are not always separable. Thus,
change detection algorithms focus on the estimation
of the optimum “threshold of perception” and the
formulation of an optimized classification rule.
Change detection methods encountered in the
literature (Radke, 2005) are based on statistic
criteria, in order to decide whether a pixel or a block
of pixels corresponds to a changed or an unchanged
region. A statistic approach proposed in (Aach,
1993), (Cavallaro, 2001) applies a statistic
significance test over a rectangular window which is
centred in the pixel of interest. The approach
assumes a Gaussian noise model and introduces a
2
χ
probability distribution function in the
formulation of the classification rule. However, the
utilized significance test relies on prior knowledge
of the noise model and therefore requires the
availability of statistic noise information in order to
operate reliably.
The method which is analyzed in the present
paper aims to estimate the noise model - that is, the
noise mean value
n
m and standard deviation
n
σ
-
from the image blocks of the absolute difference. Let
ij
m
and
ij
σ
denote the observed mean value and
standard deviation in each block
ij
B of the absolute
difference. In order to achieve an accurate noise
model approximation, it is sufficient to restrict the
noise-model calculations to the block subset which
exhibits noise-level fluctuations. Therefore, the goal
of the proposed procedure is to group blocks of the
absolute difference to clusters, according to their
statistic similarity (Alexandropoulos, 2005).
In order to perform the clustering operation, each
cluster
k
C is described by two statistic parameters:
the averaged mean value
k
C
m
and the averaged
standard deviation of its member blocks. Thus, for a
cluster with
k
N member blocks, we define:
SIGMAP 2007 - International Conference on Signal Processing and Multimedia Applications
262
∑
=
=
k
k
N
i
k
i
C
N
m
m
1
(1)
∑
=
=
k
k
N
i
k
i
C
N
1
σ
σ
(2)
Obviously, equations (1) and (2) define the centroid
of cluster
k
C .
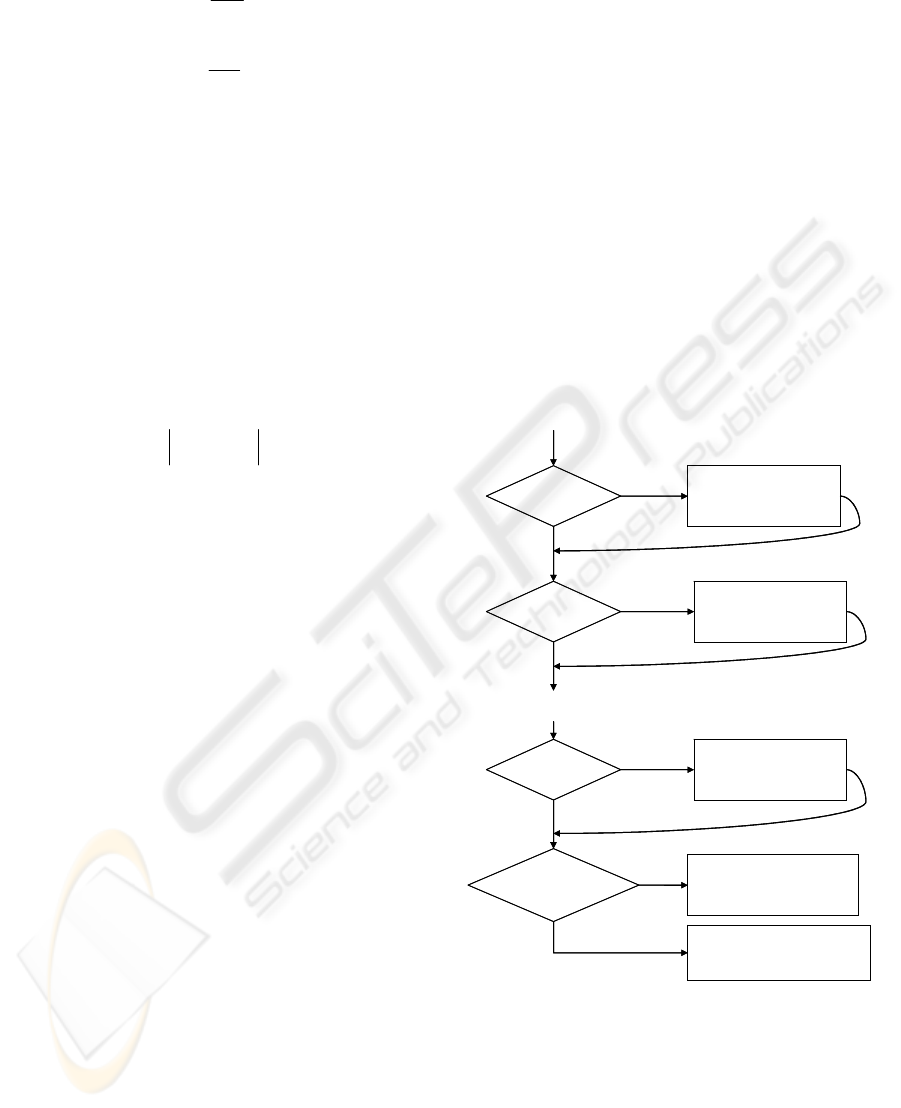
The proposed block clustering procedure is
performed in the following steps.
i) Cluster
1
C is initialized:
11
1
mm
C
=
(3)
11
1
σ
σ
=
C
(4)
ii) For each block
ij
B of the absolute difference and
for each existing cluster
k
C
),...,2,1( nk =
, their mean
value distance
kij
d
,
is estimated.
k
Cijkij
mmd −=
,
(5)
If
k
Ckij
d
σ
≤
,
, cluster
k
C is added to the list of
candidates.
iii) If candidate clusters have been found, block
ij
B
is classified to the cluster which yields the minimum
mean value distance and the centroid of the “winner
cluster” is updated, as indicated by equations (1) and
(2). If no candidate clusters have been found, a new
cluster
1+n
C is initialized and block
ij
B
is added to
it. Therefore:
ijC
mm
n
=
+1
(6)
ijC
n
σ
σ
=
+1
(7)
The flowchart of the clustering procedure is
presented in Figure 1.
Upon completion of the clustering algorithm, a
segmentation map of the absolute difference is
obtained. In this representation, blocks which have
been grouped into the same cluster are displayed
with the same intensity value. When the algorithm is
applied on colour images, a segmentation map is
extracted for each colour component. In the present
work, the segmentation technique is used in the HSL
colour space. Specifically, it is applied on the hue
and saturation components of the absolute
difference.
The segmentation maps are used as a qualitative
criterion and indicate the effectiveness of the
procedure in the noise model estimation. In an
effective segmentation, the majority of unchanged
regions – and only unchanged regions - is grouped in
a single cluster.
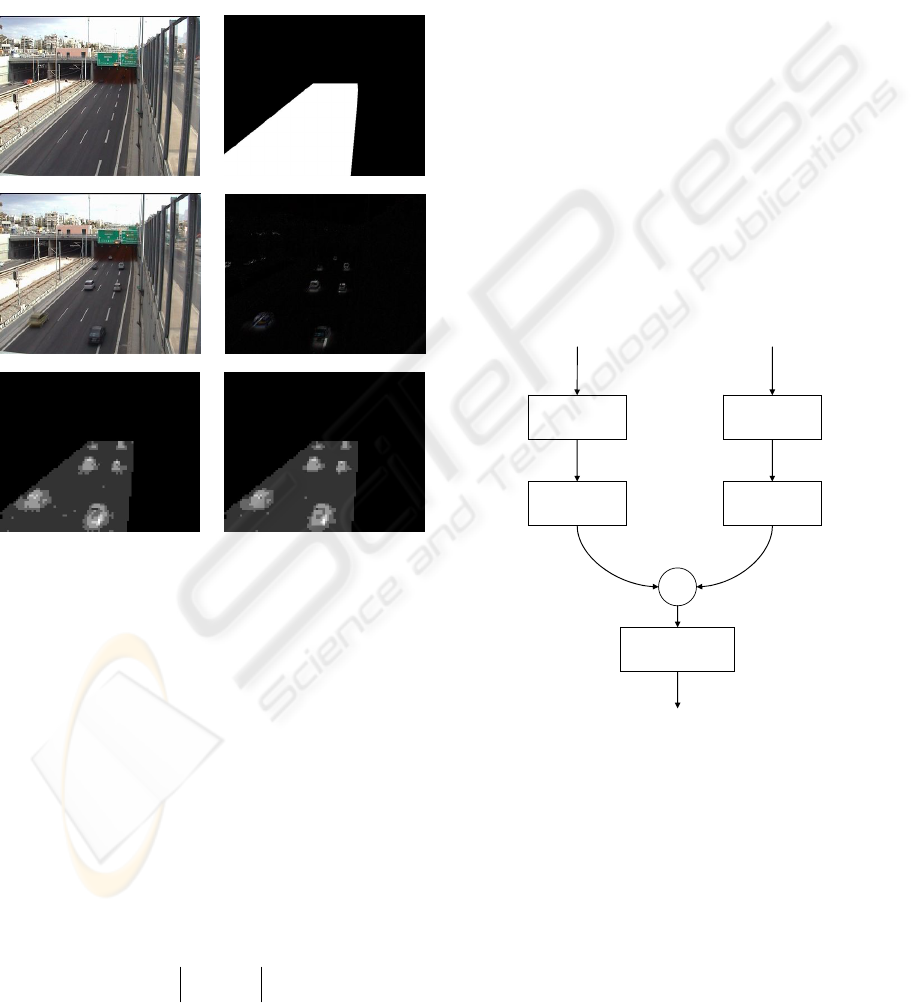
An example which shows the results of the
segmentation method is displayed in Figure 2.
Figure 2a presents a background frame which is
used as reference. The inspected region of interest is
shown in Figure 2b. Figure 2c shows an occluded
frame. The absolute difference of the reference and
the occluded frame is displayed in Figure 2d.
Figures 2e and 2f present the segmentation maps
which are produced when the statistic segmentation
algorithm is applied on the hue and saturation
components of the absolute difference. It is evident
that the majority of background blocks have been
grouped in a single cluster. Thus, the segmentation
procedure allows accurate noise model estimation,
by taking into account the properties of the block
subset which is grouped in the “background cluster”.
11
, CCij
d
σ
≤
22
, CCij
d
σ
≤
nn
CCij
d
σ
≤
,
…
Add cluster C
1
to candidate list
Add cluster C
2
to candidate list
Add cluster C
n
to candidate list
Candidate clusters
found
Classify block to cluster
C
k
: d
ij,Ck
= min
Initialize cluster C
n+1
m
Cn+1
=m
ij
, σ
Cn+1
=σ
ij
YES
NO
YES
YES
YES
NO
NO
NO
(
)
ijijij
mB
σ
,
11
, CCij
d
σ
≤
22
, CCij
d
σ
≤
nn
CCij
d
σ
≤
,
…
Add cluster C
1
to candidate list
Add cluster C
2
to candidate list
Add cluster C
n
to candidate list
Candidate clusters
found
Classify block to cluster
C
k
: d
ij,Ck
= min
Initialize cluster C
n+1
m
Cn+1
=m
ij
, σ
Cn+1
=σ
ij
YES
NO
YES
YES
YES
NO
NO
NO
(
)
ijijij
mB
σ
,
Figure 1: Flowchart of the proposed block-based statistic
segmentation algorithm.
The noise model estimation is based on the
assumption that the largest cluster carries noise
model information. This assumption is considered
safe when the occlusions occupy up to half of the
surveyed scene. This fact allows the application of
the noise model estimation method without the strict
CHANGE DETECTION AND BACKGROUND UPDATE THROUGH STATISTIC SEGMENT FOR TRAFFIC
MONITORING
263
necessity to ensure complete absence of occlusions
in the training video sequence.
Let
n
m and
n
σ
denote noise mean value and
standard deviation respectively. In order to utilize
the statistic properties of the background cluster, we
define:
max
Cn
mm =
(8)
}max{
max
C
ijn
∈=
σ
σ
(9)
a) b)
c) d)
e) f)
Figure 2: Block-based segmentation results: a) Reference
background, b) The inspected region of interest c) A
frame with occlusions d) Absolute difference, e)
Segmentation map extracted fron the the hue component
of the absolute difference f) Segmentation map extracted
from the saturation component of the absolute difference.
3 CHANGE MASK EXTRACTION
In change detection, the noise model, which is
obtained by the segmentation procedure, is used in
order to establish a noise-dependent decision rule
and separate content changes from noise-level
fluctuations. For each block
ij
B
of the absolute
difference, the mean value distance
nij
d
,
is
estimated.
nijnij
mmd −=
,
(10)
The mean value distance
nij
d
,
is then compared
against the noise standard deviation
n
σ
.
i) If
nnij
d
σ
>
,
then block
ij
B is classified as
changed.
ii) If
nnij
d
σ
≤
,
block
ij
B is unchanged.
This decision rule produces a binary change
mask which is applied on the present frame, in order
to isolate content changes. When change detection is
performed on colour images, a binary change mask
is produced for each colour component. The partial
masks are then merged into a single change mask
through the application of an OR operator. In the last
stage, block-level median filtering is applied on the
change mask for the suppression of inconsistencies.
In the present work the algorithm is applied on
the HSL colour space and produces change masks
which correspond to the hue and saturation
components of the absolute difference. The
respective algorithm flowchart is shown in Figure 3.
Absolute difference
(Hue component)
Absolute difference
(Saturation component)
Block-based
segmentation
Change mask
extraction
OR
Block-level
median filtering
Block-based
segmentation
Change mask
extraction
Binary change mask
Figure 3: Flowchart of binary change mask extraction in
colour images.
The results of the change detection algorithm are
presented in Fig 4. Figure 4a shows the reference
background and Figure 4b presents a frame with
occlusions. Figure 4c displays the changes which are
detected through the employment of the proposed
statistic segmentation and change detection criteria.
It is clear that the inclusion of the extracted noise
model to the change detection decision rule achieves
SIGMAP 2007 - International Conference on Signal Processing and Multimedia Applications
264
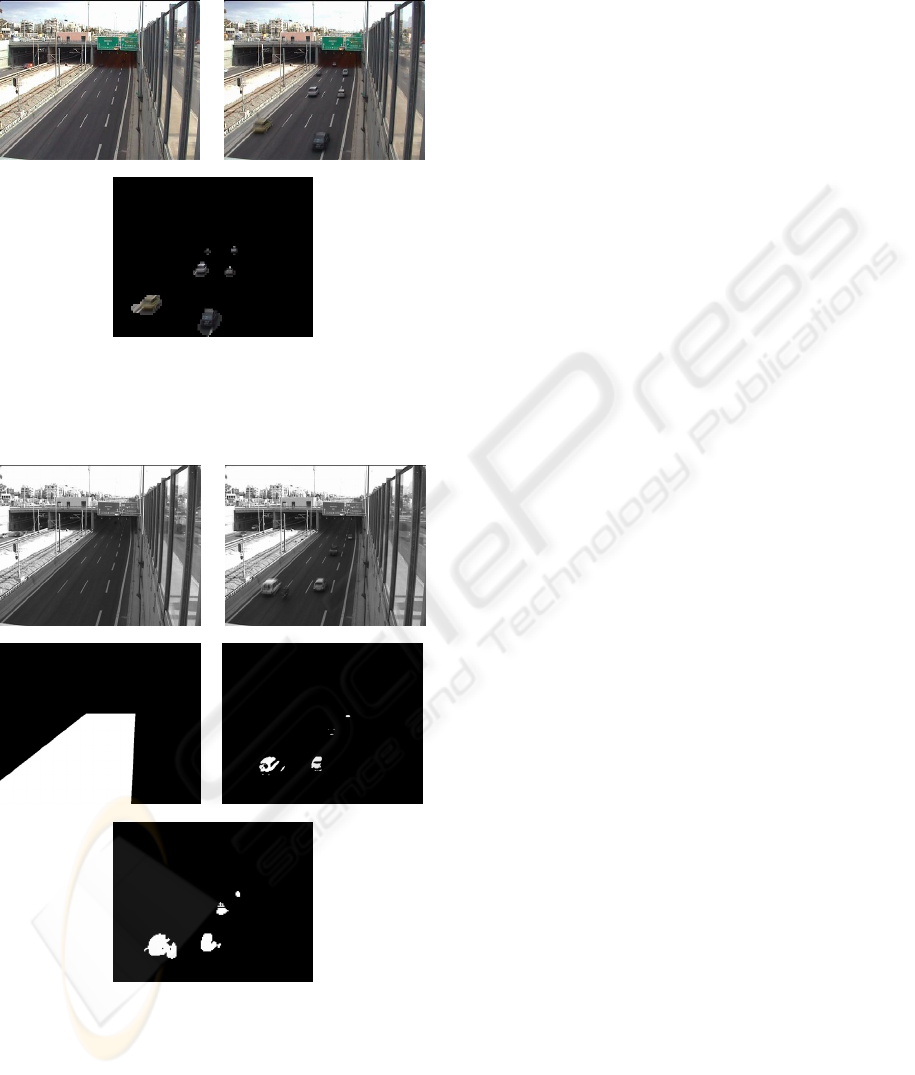
the detection of content alterations and the
concurrent suppression of noise-level fluctuations.
a) b)
c)
Figure 4: a) Reference background, b) A highway frame
with occlusions, c) Changes detected through the
application of the proposed block-based change detection
method.
a) b)
c) d)
e)
Figure 5: a) Reference frame b) Occluded frame c) Region
of interest d) Binary mask extracted by the significance
test presented in (Aach,1993) e) Binary change mask
extracted by the proposed segmentation procedure.
In the example shown in Figure 5, the results of
the proposed technique are compared to the
respective results extracted by the algorithm
proposed in (Aach, 1993). Both algorithms have
been tested on grayscale images. Figures 5a and 5b
display the reference frame and an occluded frame
respectively. The change detection algorithms are
applied on the region of interest displayed in Figure
6c. Figure 6d presents the binary change mask which
is obtained through the application of the
significance test proposed in (Aach, 1993). The
change mask displayed in Figure 5e is obtained
through application of the proposed algorithm. In the
latter case, one can notice that the utilization of the
statistic segmentation criterion has resulted in an
increased detection rate of occluded regions.
4 BACKGROUND UPDATE
Video-based ITS operate continuously under time
varying lighting condition. Thus, the surveyed
scenes inevitably exhibit gradual illumination
variations. These are caused by changes in daylight
intensity and colour temperature. Moreover, the
time-varying positioning of the light sources results
in the shifting of cast shadows. These factors affect
the appearance of the background and introduce the
necessity to update the reference frame when
performing change detection.
Background estimation methods which are found
in the literature attempt to separate foreground from
background regions based on pixel-wise temporal
measurements. Linear prediction methods, such as
Weiner and Kalman filtering, (Toyama, 1999)
(Ridder, 1995) take into account the history of the
observed intensity values at each pixel. Haritaoglu et
al. (2000) track the intensity fluctuations which are
observed between the frames of a background video
sequence and use them as a training parameter in a
thresholding criterion. Statistical methods track the
temporal intensity variations at each pixel, in order
to approximate a noise probability function
distribution. Early approaches model background
pixel intensities with a Gaussian pdf (Cavallaro,
2001). In most recent approaches, a mixture of
Gaussians is estimated for the expression of both
background and foreground models (Lee, 2005),
(Harville, 2001), (Stauffer, 1999).
The aforementioned techniques share a common
characteristic: Persistent static occlusions are
eventually incorporated in the background model.
Consequently, these methods are oriented towards
motion detection rather than change detection.
However, in the present case, the addition of still
targets to the updated background is considered as
an undesirable effect. In traffic monitoring, the
CHANGE DETECTION AND BACKGROUND UPDATE THROUGH STATISTIC SEGMENT FOR TRAFFIC
MONITORING
265
existence of a static occlusion is likely to indicate
significant events. For example, a static target may
indicate the presence of an immobilized vehicle or
an accident scene.
Toyama et al. (1999) assume discrete
illumination states and select the appropriate
background model based on k-means clustering.
This approach addresses background update in
indoor scenes with finite illumination states.
However, outdoor scenes are characterized by
complex illumination variation. Thus, the utilization
of this algorithm would require a very large number
of illumination profiles.
In the present work, a block-based statistic
background update method, which adapts to gradual
illumination alterations, is implemented. The
algorithm is based on successive comparisons of the
background against each observed frame. It utilizes
the noise model which is extracted by the statistic
segmentation method and produces a “foreground
mask”.
The decision rule which is used for the
classification of image blocks into foreground and
background blocks is similar to the one used for
change detection. In this case, the averaged mean
value
max
G
m and averaged standard deviation
max
C
σ
of the dominant cluster
max
C are introduced in the
criterion.
Initially, the mean value of each block of the
absolute difference is compared against the averaged
mean value of the dominant cluster.
maxmax
, CijCij
mmd −=
(11)
i) If
maxmax
, CCij
d
σ
> block
ij
B is added to the
foreground mask.
ii) If
maxmax
, CCij
d
σ
≤
block
ij
B denotes a background
region
In colour images, this decision rule extracts a
foreground mask for the absolute difference of each
colour component.
In the next stage of the procedure, the foreground
mask of each colour component is subjected to
block-level median filtering, in order to suppress
inconsistencies. The foreground masks are then
merged into a single mask through an OR operation.
Image blocks which lie in occlusion boundaries
frequently exhibit statistic characteristics which are
similar to the ones of unoccluded regions, because a
percentage of their member pixels display
background regions. The incorporation of these
blocks to the background model would cause the
appearance of edge traces and the overall
degradation of the background scene. In order to
cope with this issue, the foreground mask is
subjected to block-level dilation and the occlusion
boundaries are added into it.
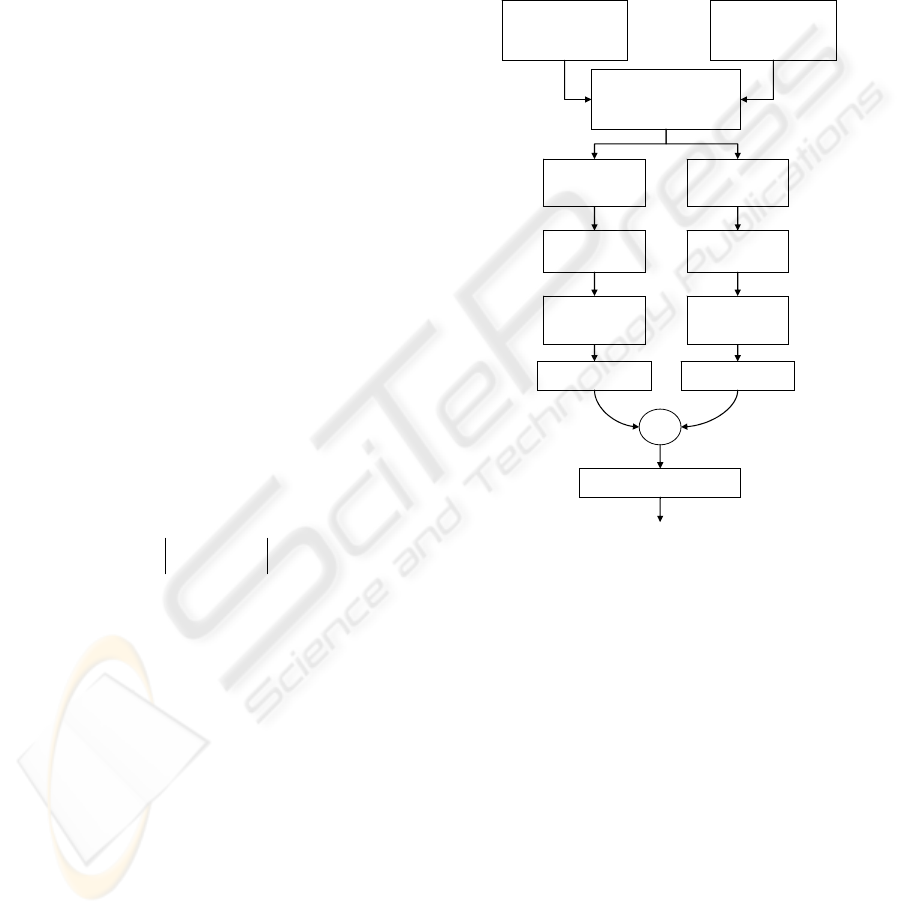
The flowchart of the foreground mask extraction
is presented on Figure 6.
Background frame
(t=t
0
)
Present frame
(t=t
1
)
OR
Absolute difference
Hue
component
Saturation
component
Block-based
segmentation
Block-based
segmentation
Median filter
Block-level dilation
Median filter
Foreground mask
Foreground
extraction
Foreground
extraction
Figure 6: Flowchart of the foreground mask extraction
algorithm.
After the extraction of each blocks
ij
F of the binary
foreground mask, the background model is updated
as follows:
i) If
0
=
ij
F , the background frame is updated in
the respective block.
ii) If
1
=
ij
F
, the background model maintains its
previous state in the specific block.
The proposed algorithm has been applied on
highway video sequences, in order to demonstrate its
capability to adapt to time-varying illumination
conditions. An example is presented in Figure 7.
Figure 7a shows the background frame at the
initialization of the algorithm. Figure 7b shows an
occluded frame, in which ambient light variations
SIGMAP 2007 - International Conference on Signal Processing and Multimedia Applications
266

have been introduced. Figure 7c displays the
differences between frames 7a and 7b. One can
observe the chrominance variations which have
emerged on the highway surface. If the noise model
estimation is performed offline - during an initial
training stage - a direct comparison between frames
7a and 7b would result in the misclassification of all
image blocks as changed. If inter-frame noise is
estimated continuously, direct differencing of these
frames would result in the estimation of an
exaggerated noise model and the formulation of a
conservative decision rule.
a) b)
c) d)
e) f)
Figure 7: Background update example a) Reference frame
b) Changed frame c) Differences between the initial
background model and the changed frame, d) Updated
background e) Differences between the updated
background and the changed frame f) Detected features.
The utilization of the proposed background
update procedure produces the background model
which is shown in Figure 7d. Figure 7e displays the
differences between the present frame and the
updated model. It is evident that the update process
managed the incorporation of gradual illumination
changes to the background model without the
addition of occlusions. The change detection results
are highlighted in Figure 7f.
5 FURTHER DEVELOPMENT
This paper has presented a combination of image
processing algorithms, which can be included in the
front end of a video-based ITS for target tracking in
highway scenes. The presented approach addresses
the problem through the combination of change
detection and background update algorithms.
The analysis in the present work has focused
exclusively on the description of early vision
algorithms for feature extraction. Further
development on the implementation of an integrated
ITS solution demands the cooperation of machine
vision algorithms with content interpretation
algorithms. This integration is necessary for the
assessment of the temporal behaviour of each
detected feature and the extraction of high-level
attributes. In traffic surveillance, high-level
attributes are mostly related to motion characteristics
and are considered useful for the estimation of
vehicle properties, such as vehicle speed and
trajectory patterns, or the detection of significant
events, such as traffic jam conditions or accidents.
The estimation of high-level attributes requires
the inter-frame correlation of the extracted features
and can be addressed through the employment of
MPEG-7 visual descriptors. The use of visual
description schemas establishes a framework which
offers the capability to formulate event
representations. This approach attempts to enable the
ITS to interpret the behaviour of each feature by
matching it with the appropriate event profile.
Therefore, it is expected that the ITS decision
support capabilities will be enhanced.
REFERENCES
Massey, M., and Bender, W., 1996. Salient Stills: Process
and Practice, In IBM Systems Journal, Vol. 35, No 3
& 4, pp. 557-573.
Radke, R. J., Andra, S., Al-Kofahi, O., and Roysam, B.,
2005. Image Change detection Algorithms: a
systematic survey, In IEEE Transactions on Image
Processing, Vol. 14, Issue 3, pp. 294-307.
Aach, T., Kaup, A., and Mester, R., 1993. Statistical
model based change detection in moving video, In
Signal Processing, Vol. 31, Issue 2, pp. 165-180.
Cavallaro, A., and Ebrahimi, T., 2001. Video object
extraction based on adaptive background and
statistical change detection, In Proc. SPIE Visual
Communications and Image Processing, pp. 465-475.
Alexandropoulos, T., Boutas, S., Loumos, V., and
Kayafas, E., 2005. Real-time change detection for
surveillance in public transportation, In IEEE
CHANGE DETECTION AND BACKGROUND UPDATE THROUGH STATISTIC SEGMENT FOR TRAFFIC
MONITORING
267

International Conference on Advanced Video and
Signal-Based Surveillance, pp. 58-63.
Toyama, K., Krumm, J., Brummit, B., and Meyers, B.,
1999. Wallflower: Principles and Practice of
Background Maintenance, In 7th IEEE International
Conference on Computer Vision, pp. 255-261.
Ridder, C., Munkelt, O., and Kirchner, H., 1995. Adaptive
background estimation and foreground detection using
Kalman filtering, In International Conference on
Recent Advances in Mechatronics, pp.193-199.
Haritaoglu, I., Harwood, D., and Davis, L. S., 2000. W4:
Real-time surveillance of people and their activities, In
IEEE Transactions on Pattern Analysis and Machine
Intelligence, Vol. 22, No. 8, pp. 809-830.
Lee, D. S., 2005. Effective Gaussian Mixture Learning for
Video Background Subtraction, In IEEE Transactions
on Pattern Analysis and Machine Intelligence, Vol.
27, No. 5, pp. 827-832.
Harville, M., Gordon, G., and Woodfill, J., 2001.
Foreground Segmentation Using Adaptive Mixture
Models in Color and Depth, In Proc. IEEE Workshop
Detection and Recognition of Events in Video, pp. 3-11.
Stauffer, C., and Grimson, W.E.L., 1999. Adaptive
Background Mixture Models for Real-Time Tracking,
Proc. Conf. Computer Vision and Pattern Recognition,
Vol. 2, pp. 246-252.
SIGMAP 2007 - International Conference on Signal Processing and Multimedia Applications
268
