
MATCHING FOR MOBILE USERS
IN THE PUBLISH/SUBSCRIBE PARADIGM
A. M. Roumani and D. B. Skillicorn
School of Computing, Queen’s University, Kingston, Canada
Keywords:
Mobile publish/subscribe, nearest neighbor problem, high-dimensional search, singular value decomposition.
Abstract:
In a mobile publish/subscribe paradigm, user service discovery and recommendation requires matching user
preferences with properties of published services. For example, a user may want to find if there is a moderately
priced Chinese restaurant that does not require reservations close by. To generate accurate recommendations,
the properties of each user subscription must be matched with those of existing services as accurately as
possible. This isa difficult problem when users are mobile, wirelessly connected to a network, and dynamically
roaming to different locations. The available data is very large, and the matching must be computed in real
time. Existing heuristics are quite ineffective.
We propose novel algorithms that use singular value decomposition as a dimension-reduction technique.
We introduce “positive” nearest-neighbor matching to find services whose attribute values exceed those of
a new user subscription. Making this idea effective requires careful attention to details such as normaliza-
tion. Performance and quality of matches are reported for datasets representing applications in the mobile
publish/subscribe paradigm. For n services and m preference attributes, reasonable matches can be found in
time O (mlogn), using O (nm) storage.
1 INTRODUCTION
Publish/subscribe is an asynchronous messaging
paradigm for connecting information providers (pub-
lishers) with interested information consumers (sub-
scribers) in a distributed environment, providing a dy-
namic network topology and scalability. The pub/sub
paradigm extends, in a natural way, to other kinds
of service discovery, where service providers play the
role of publishers, and users with preferences are sub-
scribers. In a mobile setting, services are provided in
a geographical region, perhaps one cell of a mobile
phone system. Hence there are multiple pub/sub sys-
tems. Users’ service requests are contextualized by
and satisfied within the current region. User mobil-
ity implies that new service requests can appear at any
time, and that they must be satisfied quickly before the
user moves on. Either a push model or a pull model of
service is possible. In the pull model, a user requests a
matching service; in the push model, a service finds a
matching user preference and provides a service, per-
haps a discount coupon contextualized for the particu-
lar location of the user.
The central component of pub/sub systems is the
broker (event dispatcher), which facilitates the mes-
sage staging and routing in the system. Publishers
send information to the broker in the form of publica-
tions (events). Subscribers indicate interests in events
by maintaining a set of subscriptions at the broker.
They also indicate situations in which they would like
to be notified. The broker acts as a mediator between
publishers and subscribers, deciding when to send no-
tifications and who should receive them.
In a pub/sub paradigm, user service discovery re-
quires matching user preferences to available pub-
lished services in a timely fashion. Hence, the sys-
tem must find an efficient solution to the problem of
matching each subscription against a large number of
publications, or matching a publication (event) against
a large number of subscriptions. Take, for example,
a user with a handheld mobile device that uploads
his preference vector to an advertising server. The
server will match the preference vector with compa-
nies’ advertisements, and offers the user a coupon that
is valid for X time. Although there have been stud-
ies on matching algorithms in these systems, the prob-
lem of finding accurate matchings in a timely manner
amongst multiple possible publications is new.
This paper presents two efficient matching algo-
rithms for mobile user services in pub/sub systems,
using Singular Value Decomposition (SVD) (Golub
and Loan, 1989) as a dimension reduction technique.
Known service (publication) data is transformed, in
a preprocessing stage, so that the high-dimensional
173
M. Roumani A. and B. Skillicorn D. (2007).
MATCHING FOR MOBILE USERS IN THE PUBLISH/SUBSCRIBE PARADIGM.
In Proceedings of the Second International Conference on Wireless Information Networks and Systems, pages 173-180
DOI: 10.5220/0002147401730180
Copyright
c
SciTePress

space of preferences for many possible services is pro-
jected into a low-dimensional space. When a match is
to be found, the user’s preferences are mapped into the
same low-dimensional space, producing values that
can be rapidly compared to available service profiles.
The first algorithm implements this idea using a single
singular value decomposition, while the second uses
projections from randomly weighted versions of the
global preference data. We evaluate the performance
and quality of our algorithms using two datasets rep-
resenting applications in the mobile publish/subscribe
paradigm. In practice, reasonable matches can be
found in time
O (mlogn), using O (nm) storage space,
where n is the number of services (publications) and
m the number of attributes or preference possibilities.
This is in contrast to “approximate” nearest-neighbor
techniques, which require either time or storage expo-
nential in m.
2 EXISTING APPROACHES
There have been many designs proposed in the litera-
ture to model a pub/sub system. The earliest systems
were channel-based, with the broker component acting
as a broadcast channel (Babu and Widom, 2001). The
most significant limitation of these systems is the lack
of flexibility and expressiveness, leading to high net-
work traffic, and necessitating additional subscriber-
side filtering. A refinement over the channel-based ap-
proach is the topic-based pub/sub model that catego-
rizes events into hierarchical subjects (topics), provid-
ing a finer granularity of events (TIBCO, 2006). This
model uses a tree-like structure to categorize events,
and the matching process is basically a tree traversal.
The drawback of this model is the limited selectivity of
subscriptions. Today, companies like Netscape, Radio
Userland, and Moreover use RSS (RSS, 2006) to dis-
tribute and syndicate article summaries and headlines
to web users who wish to subscribe to them.
The latest pub/sub systems have the ability to filter
information using the contents of a published event. In
this model subscriptions are specified as expressions
evaluated over the published event contents. This ap-
proach provides greater expressiveness to filter publi-
cations and is more easily customized for individual
subscribers. The information filtering process requires
an efficient matching algorithm with high through-
put and scalability. Many algorithms proposed for
content-based matching (Fabret et al., 2001; Fabret
et al., 2000) attempt to optimize algorithms by limiting
the expressiveness of subscriptions.
There is also a proposed state-persistent model for
pub/sub systems (Leung, 2002) that stores the states
of both publications and subscriptions in the system
and notifies subscribers only when the states of their
subscriptions change. An example of a content-based
matching algorithm for state-persistent pub/sub sys-
tems was proposed in (Leung and Jacobsen, 2003).
The matching problem in a state-persistent pub/sub
system requires storing information about publications
and subscriptions, indexing the relationships between
them, and detecting state transitions.
In this paper we are targeting users (subscribers)
who are mobile, with handheld devices, wirelessly
connected to a network, and dynamically roaming to
different environments. For mobile users, service dis-
covery requires matching user preferences to available
services as accurately as possible (For work on mo-
bile pub/sub see (Burcea et al., 2004)). This is a diffi-
cult problem since users are mobile and matches must
be done in real-time. The magnitude of the problem
increases with respect to the number of attributes in
the preference criteria for each user. Take, for exam-
ple, a user with a handheld mobile device who is in
Montreal and would like to eat Chinese food. Such
a user might submit a service request (subscription)
with the attributes: Chinese restaurant, Montreal, non-
smoking, within 15 minutes walking, under 10 min-
utes seating time, with buffet option, and below a cer-
tain price. In addition, there could be several possible
restaurants that match the user’s criteria, and we might
require the system to send one, some, or all of such
matches. The selection process in this environment
has to find the best matching service(s) (a restaurant in
our example) that match the user’s request from among
many possible matches.
The values used for attributes can be classified into
two types as follows. Binary values (0 and 1), de-
scribing the presence or absence of particular prop-
erties of services that a user may require. For ex-
ample, a user may submit a subscription query for
weather reports consisting of the attributes (earth-
quakes, tsunamis, tornadoes, local weather, etc.). The
second type is ternary values (1, −1, and 0), describ-
ing a preference for or against a particular attribute, as
well as a neutral value. This could be, for example, the
restaurant property for “non-smoking”. There is little
point in trying for an absolute best fit because the in-
formation available to the system can become stale, or
the user might change location. Such a dynamic envi-
ronment benefits more from finding approximate best
matches instead.
3 THE NEAREST-NEIGHBOR
PROBLEM
Let the number of services be n and the number of at-
tributes be m. n could be in the thousands and m in the
WINSYS 2007 - International Conference on Wireless Information Networks and Systems
174

tens to hundreds. There is an obvious geometric inter-
pretation of the problem in which each service descrip-
tion tuple and each query (request) tuple are points in
an m-dimensional space.
When finding a match in the case of binary-valued
attributes, the goal is to find the nearest neighbor of
the query tuple – but with the extra difficulty that the
value of each of the service-tuple attributes must be no
smaller than the value of the corresponding attribute
for the query. We refer to such a service tuple as fea-
sible. We are only interested in points that are fur-
ther away from the origin than the point correspond-
ing to the query, but we want to find, among them,
the point that is nearest to the query. Call this the
“positive nearest-neighbor”. This guarantees that a
service tuple contains all the required preferences in
the query tuple (represented by ‘1’). In the case of
ternary-valued attributes, the goal is to find the ordi-
nary nearest-neighbor of the query tuple, where the
match can be near to the query point in any direction.
Given a query tuple, there is an obvious brute-
force algorithm for finding the nearest neighbor with
time complexity
O (nm). For a small number of di-
mensions m, simple solutions suffice, but for larger m,
say m > 10, the complexity of most methods grows
exponentially as a function of m. Dobkin and Lip-
ton (Dobkin and Lipton, 1976) give an upper bound
for the time required to search for a nearest neigh-
bor,
O (2
m
logn) query time, and O (n
2
m+1
) preprocess-
ing time and storage space. Most of the subsequent
improvements and extensions require a query time of
Ω( f(m)logn), where f(m) (sometimes hidden) de-
notes an exponential function of m. One of the most
widely used algorithms relies on the k-d tree (Samet,
1990). The average case analysis of heuristics using
k-d trees for fixed dimension m requires
O (nlogn) for
preprocessing and
O (logn) query time. Although k-d
trees are efficient in low dimensions, their query time
increases exponentially with increasing dimensional-
ity. The constant factors hidden in the asymptotic run-
ning time grow at least as fast as 2
m
, depending on the
distance metric used.
The complexity of exact nearest neighbor search
led to the “approximate” nearest-neighbor problem:
finding a point that may not be the nearest-neighbor to
the query point, but is not significantly further away
from it than the true nearest neighbor. Several ap-
proximate nearest-neighbor algorithms have been de-
veloped (Kleinberg, 1997)but they either use substan-
tial storage space, or have poor performance when
the number of dimensions is greater than logn. The
positive-nearest-neighbor requirement means that the
performance of such algorithms becomes even worse.
For example, the positive nearest neighbor may be
quite far from the query point, with many closer but
infeasible objects (service tuples). This suggests using
a technique that can transform the high-dimensional
space of the data into lower-dimensional subspaces.
One obvious technique is Singular Value Decomposi-
tion (SVD). We have already noted the natural geomet-
ric interpretation of a list of tuples describing services.
If we regard such a list as an n× m matrix, then a sin-
gular value decomposition can be regarded as trans-
forming the original geometric space into a new one
with the following useful property: the first axis of the
new space points along the direction of maximal vari-
ation in the original data; the second axis along the di-
rection of maximal variation remaining, and so on. Let
A be the n× m matrix representing the services. Then
the singular value decomposition of matrix A is given
by A = USV
T
where
T
indicates matrix transpose. If
matrix A has r linearly-independent columns (r is the
rank of A), then U is an n × r orthogonal matrix (i.e.,
U
T
U = I), S is an r × r non-negative diagonal ma-
trix whose elements (called singular values) are non-
increasing, s
1
≥ s
2
≥ s
r
> 0, and V
T
is an orthogonal
r × m matrix. Each row of U gives the coordinates of
the corresponding row of A in the coordinate system of
the new axes (defined by V). The complexity of com-
puting the SVD of a matrix is
O (n
2
m) and the space
required to store the data structure is
O (mr+ r
2
+ rn).
One of the most useful properties of an SVD is that
the matrices on the right-hand side can be truncated by
choosing the k largest singular values and the corre-
sponding k columns of U and k rows of V
T
. We show
that a tuple of m properties can be encoded by coordi-
nates in a single dimension using SVD, given suitable
normalization of the data. Matching a query tuple to
appropriate service tuples requires encoding the query
attributes, and then searching a ranked list of projected
service values. We also propose a technique that pro-
duces highly accurate matches by using a collection
of SVD decompositions, in which each decomposition
uses data independently weighted by random scalars.
This provides several different projections of the data,
which tends to reveal the most important latent struc-
ture. Hereafter we will refer to nearest-neighbor as
n-n.
4 ALGORITHMS
We propose two SVD-based Search (SVDS) tech-
niques for solving the positive and the ordinary n-n
matching problem: basic SVDS (bSVDS) and random-
weighted SVDS (rwSVDS). The bSVDS algorithm
works in two stages: a preprocessing stage and a run-
time stage. The natural similarity (proximity) metric
is Euclidean distance – a service tuple is a good match
for a request tuple if the Euclidean distance between
MATCHING FOR MOBILE USERS IN THE PUBLISH/SUBSCRIBE PARADIGM
175

them is small (and the service-tuple attributes meet or
exceed the request requirements in the original space
for the positive n-n case). We first preprocess the set
of service tuples by computing the SVD of the origi-
nal matrix A after normalization, then truncate the re-
sult to one dimension. The resulting list is sorted by
increasing values of u
1
, the first column of U. When
a new query arrives, it must be mapped into the cor-
responding space of U, and a value created that can
be compared to the encoded values. By re-arranging
the SVD decomposition equation we get U = AVS
−1
.
This multiplication can be applied to new queries with
the shape of rows of A to compute their coordinates
in the transformed space. Since we have truncated the
SVD, this mapping requires only the first column of
V and the first singular value, and therefore takes time
O (m). After the transformation maps the query tuple
to a single value, the value is compared to service’ val-
ues using binary search to find the service with the
closest value. This service tuple may not be feasible
(it is similar to the query tuple in the original A matrix
but one or more of its attributes is smaller than the cor-
responding value of the query). In this case, the ranked
list is searched by choosing the next closest value on
either side of the original entry, until a feasible tuple is
found.
Algorithm rwSVDS is an extension of bSVDS; in-
stead of using a single search list to predict the pos-
itive n-n point, it uses multiple search lists. rwSVDS
uses a set of three decision lists to predict the nearest-
neighbor point. To create each list, the attributes of the
original dataset are weighted with different (randomly
chosen) scalars in the range (0,1] to create a new
weighted matrix (note that the original input data is
not changed, since is later used for feasibility check).
This process is repeated three times to generate three
differently weighted matrices. SVD is then applied
to each matrix independently, to generate three one-
dimensional spaces, which are then each sorted. The
selection process transforms each query tuple (after
scaling it with the corresponding weight vector) into
the space of each SVD, then searches all three ranked
lists in a concurrent fashion to find a common match.
The first feasible service-tuple to have been found on
all three lists is reported as the best match. The use of
three lists is based on extensive experiments that show
that more lists adds cost without improving matches.
5 EXPERIMENTAL SETTING
We generate artificial datasets to represent proper-
ties of services in the pub/sub paradigm, with binary-
valued attributes (selected randomly with 20% den-
sity of 1’s) and ternary-valued attributes (selected uni-
formly randomly). We normalize the data by zero-
centering each column. Each experiment result is the
average of 70 runs. For comparison purposes, we also
consider a ranking algorithm that uses the sum of the
attributes. We call it the SUM-based Search algorithm
(SUMS). The advantage of the sum is that any service
tuple whose sum is smaller than the sum of the require-
ments of a query tuple cannot possibly be feasible. We
compute the sum of attributes for each service tuple
and sort the list based on the sum of ratings. The
sum is then computed for each query tuple, and bi-
nary search is used to find the feasible service closest
in sum to it. When applying the SUMS algorithm to
the ternary-valued data, there is a special handling to
accommodate for the negative values (−1’s); the sum
is computed by first incrementing the attributes’ val-
ues. The same handling is done for the queries before
the search starts.
Both our SVDS algorithms and SUMS algorithm
have similar properties: both require
O (nm) storage
for the ranking information (since the full set of at-
tributes must be checked for feasibility); for both, the
cost of binary search is
O (logn); and for both the cost
of computing the fit between a query tuple and a ser-
vice tuple is
O (m). The preprocessing required for
SVDS is more expensive. However, this cost is amor-
tized over all the matches of queries to services. The
performance difference between the two rankings de-
pends on how many list elements must be examined
to find a feasible match, and on the quality of such a
match. We also compare our algorithms’ effectiveness
with that of randomly selecting services until a feasi-
ble one is found (call this simple algorithm RAND),
and with exhaustive search. RAND provides a base-
line for the number of probes required to find a good
solution, while exhaustive search provides a baseline
for how good a solution is possible.
The main performance measures of interest are:
cost – measured in number of probes needed to find
a match, including the cost of binary search (where
applicable); sub-quality – the Euclidean distance
from the match point found by the algorithm to the
query point (A higher value represents a lower-quality
match; and sub-optimality ratio – the ratio of the so-
lution found by an algorithm to the optimal solution.
The lower the value the better the quality of the match
found.
In our experiments, we search for the positive n-n
in binary-valued datasets, and for the ordinary n-n in
ternary-valued datasets. For each combination of ex-
periments, the fraction of objects that are feasible for
each query are held to approximately 5%. If feasible
objects are extremely scarce, then exhaustive search is
probably the best matching technique; if the fraction
of feasible objects is large, then the system does not
WINSYS 2007 - International Conference on Wireless Information Networks and Systems
176
provide much discrimination in services which is also
an unlikely scenario.
6 RESULTS AND DISCUSSION
We study the effect of varying the number of objects
(services) and attributes on the search cost and quality
of the solutions.
6.1 Binary-valued Datasets
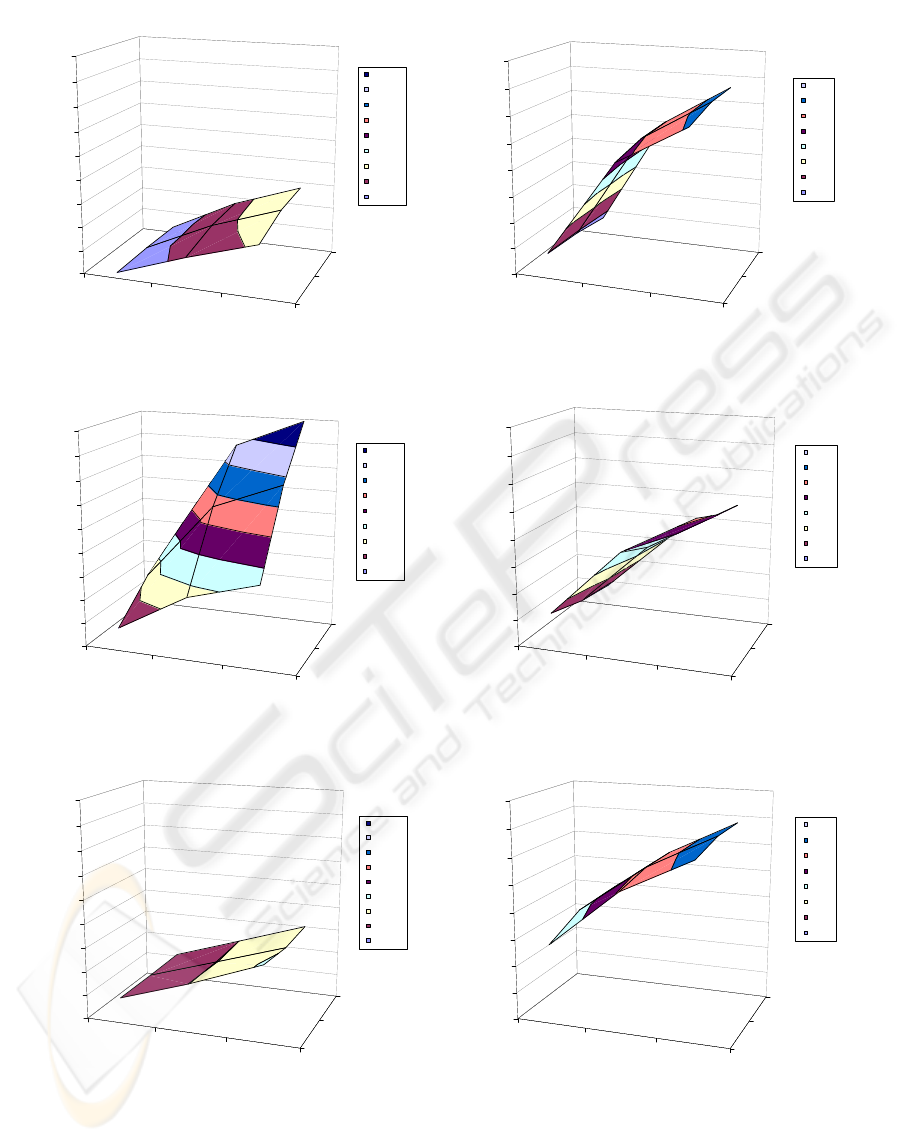
First, we test the basic SVDS algorithm (bSVDS). Fig-
ure 1 plots the number of probes (cost) required to find
a feasible object for a query (left column), and the sub-
quality of this match (right column) when attributes
are binary values. Plots (a) and (b) show the number of
probes required and the sub-quality for bSVDS, plots
(c) and (d) show the same for SUMS, and plots (e) and
(f) show them for RAND.
We see in Figure 1 that bSVDS requires the low-
est number of probes to find a match. Although the
cost and sub-quality of the match found by all al-
gorithms increases with increasing numbers of ob-
jects and attributes, the number of probes required
by SUMS increases rapidly. However, this increase
comes at a tradeoff with sub-quality. Nevertheless,
for what might be considered the most practical cases,
i.e., those where the number of attributes is relatively
small, bSVDS is a clear winner in both cost and quality
of matches. bSVDS requires, on average, only 11% of
the probes of SUMS, and finds better-quality matches
that are 78% of the sub-quality of SUMS.
In comparison to RAND, algorithm bSVDS re-
quires 77% of the probes that RAND requires, espe-
cially for small numbers of attributes, and finds better-
quality matches that are 38% of the sub-quality of
RAND, for a moderate number of attributes. On the
other hand, SUMS requires many more probes than
RAND in almost all settings, except for small numbers
of objects and attributes. This comes at a tradeoff with
match quality for all parameter settings. Although the
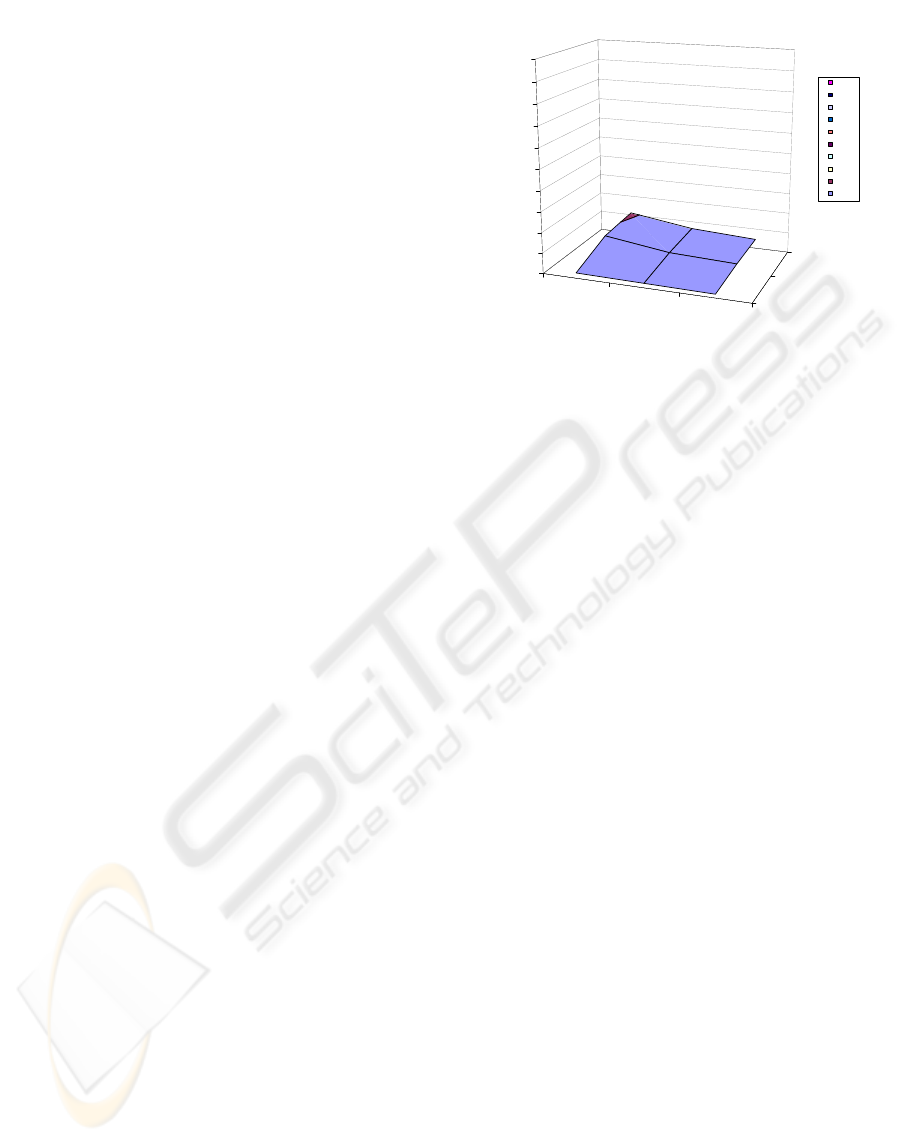
sub-quality of bSVDS increases with the number of at-
tributes, it actually gets closer to the optimal solution,
as shown in Figure 2.
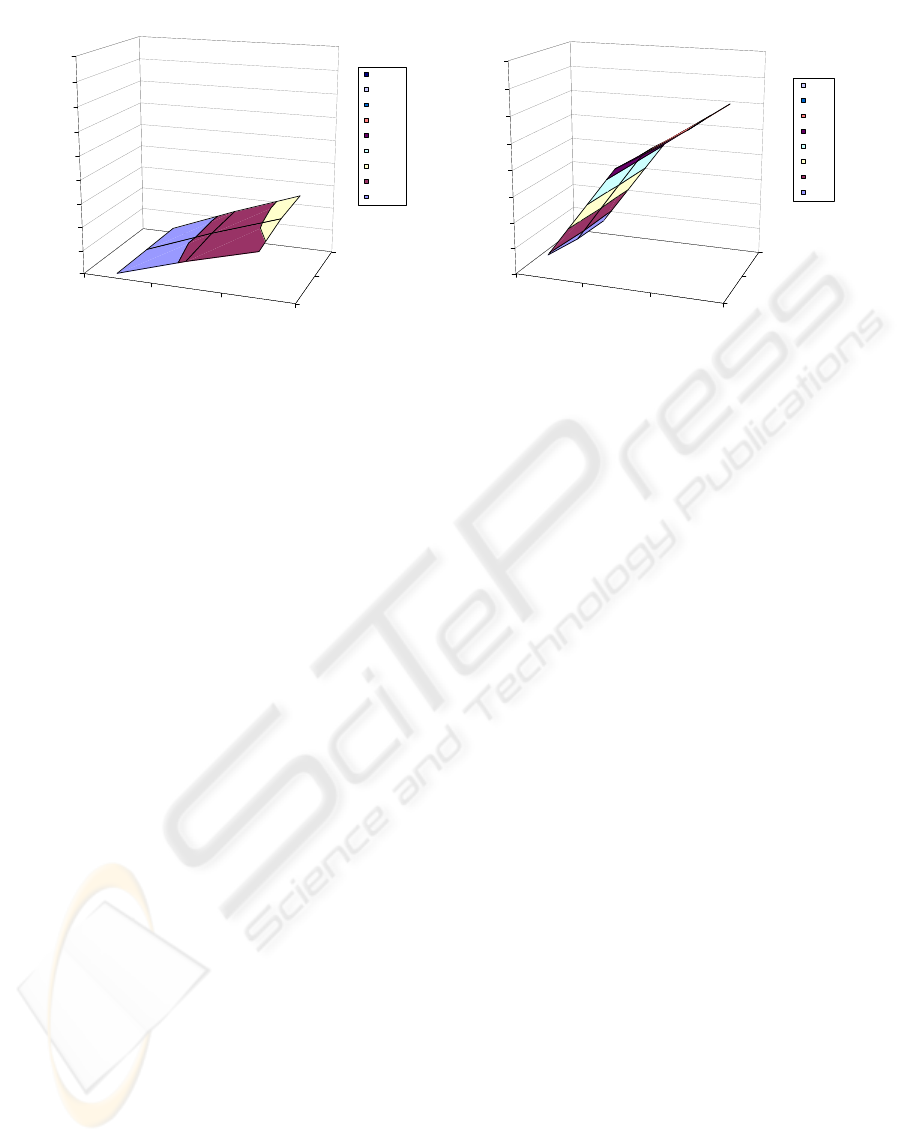
Figure 3 plots the number of probes (left column)
and the sub-quality (right column) for (rwSVDS).
It achieves better performance and better-quality
matches than bSVDS for all parameter settings – an
average of 19% lower probes and 10% better qual-
ity. This improvement affects, in its turn, the cost and
quality ratios to SUMS and RAND. Algorithm rwSVDS
now requires, on average, only 15% of the probes
of SUMS, and finds slightly better-quality matches,
of 94% the sub-quality of matches found by SUMS,
20
40
60
100
500
1000
1
2
3
4
5
6
7
8
9
10
11
Sub
Optimality
Ratio
Attributes
O bjects
bSVDS
10-11
9-10
8-9
7-8
6-7
5-6
4-5
3-4
2-3
1-2
Figure 2: Positive n-n in binary-valued dataset: bSVDS sub-
optimality ratio.
with the best results observed for small numbers of at-
tributes. As for RAND, rwSVDS requires only 33%
as many probes, and finds better-quality matches of
40% the sub-quality of those found by RAND. Fig-
ure 3(b) shows that the sub-quality of the match found
by rwSVDS increases with increasing numbers of at-
tributes, but starts to plateau as these become large.
Algorithm rwSVDS finds the best-quality matches
with better overall performance than bSVDS. Com-
pared to SUMS, it also achieved, by far, lower search
cost and better match quality for small numbers of
attributes. For higher numbers of attributes, it still
achieved near-optimal results.
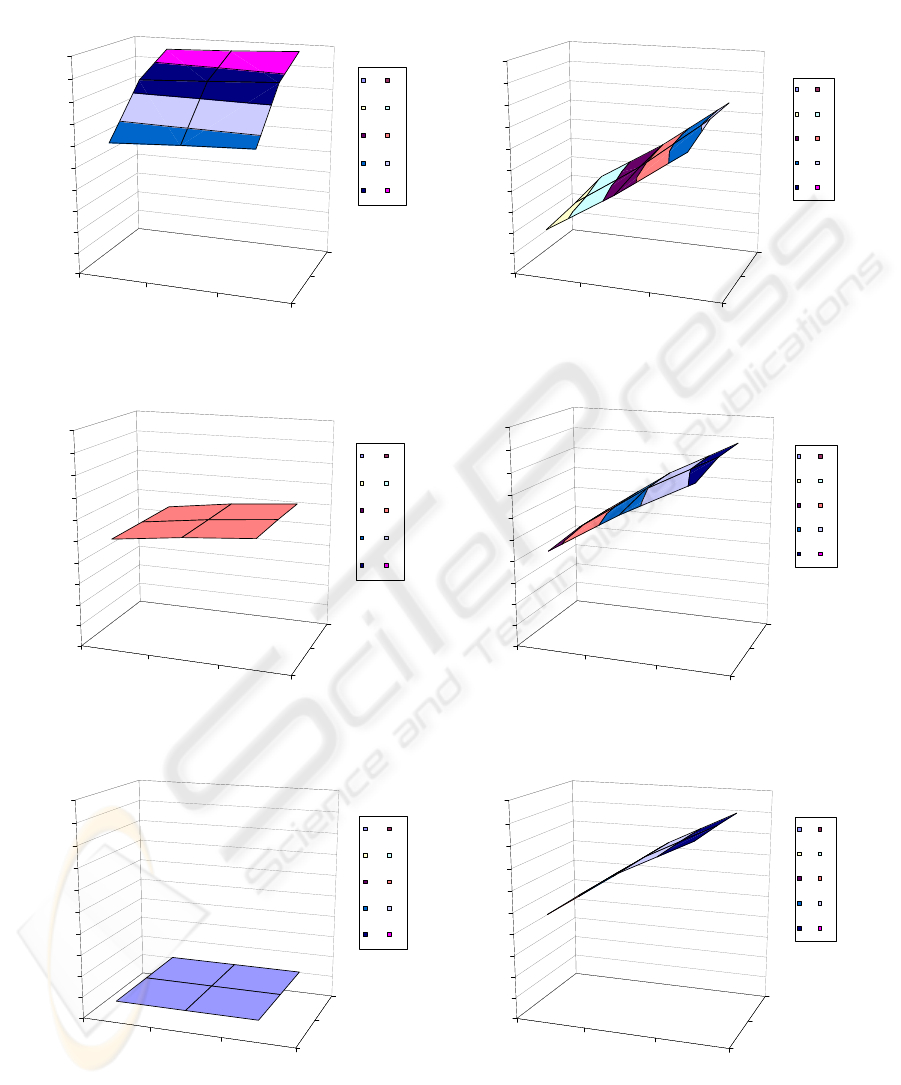
6.2 Ternary-Valued Datasets
Figure 4 plots the number of probes required by al-
gorithm (bSVDS) to find a match (ordinary n-n) for
each query, and the sub-quality of this match when at-
tributes are ternary values.
Figure 4 shows that, in comparison to the positive
n-n case, algorithms bSVDS and SUMS require many
fewer probes to find a match when the feasibility con-
dition is relaxed, whereas RAND, by definition, takes
only one probe. SUMS requires slightly more probes
than random matching (mainly due to the overhead of
the initial binary search) but maintains almost constant
cost. Algorithm bSVDS comes last in terms of per-
formance, with slightly more probes than SUMS, but
only a constant number of probes are required after
the binary search (see Figure 4(a)). As for the qual-
ity of the solution, bSVDS finds better-quality matches
than SUMS and RAND – an average of 67% of the
sub-quality of SUMS, and 64% of the sub-quality of
RAND, with the best quality for small numbers of at-
tributes.
Algorithm rwSVDS results are shown in Figure ??.
rwSVDS requires more probes than bSVDS but, on
MATCHING FOR MOBILE USERS IN THE PUBLISH/SUBSCRIBE PARADIGM
177
20
40
60
100
500
1000
0
500
1000
1500
2000
2500
3000
3500
4000
4500
Cost
Attributes
O bjects
bSVDS
4000-4500
3500-4000
3000-3500
2500-3000
2000-2500
1500-2000
1000-1500
500-1000
0-500
(a)
20
40
60
100
500
1000
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
Sub
Quality
Attributes
O bjects
bSVDS
3.5-4.0
3.0-3.5
2.5-3.0
2.0-2.5
1.5-2.0
1.0-1.5
0.5-1.0
0.0-0.5
(b)
20
40
60
100
500
1000
0
500
1000
1500
2000
2500
3000
3500
4000
4500
Cost
Attributes
Items
SUMS
4000-4500
3500-4000
3000-3500
2500-3000
2000-2500
1500-2000
1000-1500
500-1000
0-500
(c)
20
40
60
100
500
1000
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
Sub
Quality
Attributes
O bjects
SUMS
3.5-4.0
3.0-3.5
2.5-3.0
2.0-2.5
1.5-2.0
1.0-1.5
0.5-1.0
0.0-0.5
(d)
20
40
60
100
500
1000
0
500
1000
1500
2000
2500
3000
3500
4000
4500
Cost
Attributes
O bjects
RAND
4000-4500
3500-4000
3000-3500
2500-3000
2000-2500
1500-2000
1000-1500
500-1000
0-500
(e)
20
40
60
100
500
1000
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
Sub
Quality
Attributes
O bjects
RAND
3.5-4.0
3.0-3.5
2.5-3.0
2.0-2.5
1.5-2.0
1.0-1.5
0.5-1.0
0.0-0.5
(f)
Figure 1: Positive n-n in binary-valued dataset: Search cost and sub-quality for: (a) and (b) bSVDS, (c) and (d) SUMS, (e) and
(f) RAND.
the other hand, it finds matches of twice the quality.
This improvement in match quality, consequently, af-
fects the quality ratios to matches found by SUMS and
RAND, with more emphasis on the tradeoff between
search cost and match quality.
It is not so obvious which algorithm is best in terms
of cost and quality; bSVDS has slightly worse perfor-
mance than SUMS and RAND, but it achieves better
WINSYS 2007 - International Conference on Wireless Information Networks and Systems
178
20
40
60
100
500
1000
0
500
1000
1500
2000
2500
3000
3500
4000
4500
Cost
Attributes
O bjects
rwSVDS
4000-4500
3500-4000
3000-3500
2500-3000
2000-2500
1500-2000
1000-1500
500-1000
0-500
(a) Cost
20
40
60
100
500
1000
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
Sub
Quality
Attributes
O bjects
rwSVDS
3.5-4.0
3.0-3.5
2.5-3.0
2.0-2.5
1.5-2.0
1.0-1.5
0.5-1.0
0.0-0.5
(b) Sub-quality
Figure 3: Positive n-n in binary-valued dataset: Search cost and sub-quality for rwSVDS.
match quality, which would justify some sacrifice in
performance. Relative to rwSVDS, the tradeoff on per-
formance and quality is much more apparent. Algo-
rithm bSVDS has better performance, but lower match
quality.
7 CONCLUSIONS
One of the critical research challenges in the devel-
opment of pub/sub systems that support services for
mobile-user interactive applications is the discovery
of an efficient matching algorithm that is scalable
and reasonably effective, and provides good matches
between user requests and available services. As
the number of services and their attributes increase,
solutions that are cheap to implement are required.
We have presented two projection and search tech-
niques based on SVD, using SVD as a preprocessing
step to project service properties into low-dimensional
spaces. Careful normalization, and the use of multiple
projections based on random weighting of attributes
result in one-dimensional lists that can be searched,
in practice, in only a constant number of probes be-
yond the basic binary search required to find the right
part of the list. The overall complexity of matching is
O (mlogn) time and O (nm) storage space.
REFERENCES
Babu, S. and Widom, J. (2001). Continuous queries over
data streams. In ACM SIGMOD, pages 109–120, NY,
USA.
Burcea, I., Jacobsen, H.-A., DeLara, E., Muthusam, V., and
Petrovic, M. (2004). Disconnected operations in pub-
lish/subscribe. In IEEE MDM, pages 39–50, CA, USA.
Dobkin, D. and Lipton, R. (1976). Multidimensional search
problems. SIAM Journal on Computing, 5:181–186.
Fabret, F., Jacobsen, H.-A., Llirbat, F., Pereira, J., Ross,
K. A., and Shasha, D. (2001). Filtering algorithms and
implementation for very fast publish/subscribe sys-
tems. In ACM SIGMOD, pages 115–126, CA, USA.
Fabret, F., Llirbat, F., Pereira, J., and Shasha, D.
(2000). Efficient matching for content-based pub-
lish/subscribe systems. Technical report, INRIA.
http://wwwcaravel.inria.fr/pereira/matching.ps.
Golub, G. H. and Loan, C. F. V. (1989). Matrix Computa-
tions. Johns Hopkins Press, MD, USA.
Kleinberg, J. (1997). Two algorithms for nearest-neighbour
search in high dimensions. In 29th ACM STOC, pages
599–608.
Leung, H. (2002). Subject space: A state-persistent model
for publish/subscribe systems. In CASCON, pages 7–
17, Toronto, Canada.
Leung, H. and Jacobsen, H.-A. (2003). Efficient matching
for state-persistent publish/subscribe systems. In CAS-
CON, pages 182–196, Toronto, Canada.
RSS (2006). RSS: RDF site summary.
www-106.ibm.com/
developerworks/library/w-rss.html?dwzone=
web
.
Samet, H. (1990). The Design and Analysis of Spatial Data
Structures. Addison-Wesley, Boston, MA, USA.
TIBCO (2006). TIBCO rendezvous.
www.tibco.com/
software/messaging/rendezvous.jsp
.
MATCHING FOR MOBILE USERS IN THE PUBLISH/SUBSCRIBE PARADIGM
179
20
40
60
100
500
1000
0
1
2
3
4
5
6
7
8
9
10
Cost
Attributes
O bjects
bSVDS
0-1 1-2
2-3 3-4
4-5 5-6
6-7 7-8
8-9 9-10
(a)
20
40
60
100
500
1000
0
1
2
3
4
5
6
7
8
9
10
Sub
Quality
Attributes
O bjects
bSVDS
0-1 1-2
2-3 3-4
4-5 5-6
6-7 7-8
8-9 9-10
(b)
20
40
60
100
500
1000
0
1
2
3
4
5
6
7
8
9
10
Cost
Attributes
O bjects
SUMS
0-1 1-2
2-3 3-4
4-5 5-6
6-7 7-8
8-9 9-10
(c)
20
40
60
100
500
1000
0
1
2
3
4
5
6
7
8
9
10
Sub
Quality
Attributes
O bjects
SUMS
0-1 1-2
2-3 3-4
4-5 5-6
6-7 7-8
8-9 9-10
(d)
20
40
60
100
500
1000
0
1
2
3
4
5
6
7
8
9
10
Cost
Attributes
O bjects
RAND
0-1 1-2
2-3 3-4
4-5 5-6
6-7 7-8
8-9 9-10
(e)
20
40
60
100
500
1000
0
1
2
3
4
5
6
7
8
9
10
Sub
Quality
Attributes
O bjects
RAND
0-1 1-2
2-3 3-4
4-5 5-6
6-7 7-8
8-9 9-10
(f)
Figure 4: Ordinary n-n in ternary-valued dataset: Search cost and sub-quality for: (a) and (b) bSVDS, (c) and (d) SUMS, (e)
and (f) RAND.
WINSYS 2007 - International Conference on Wireless Information Networks and Systems
180
