
MULTI-AGENT BUILDING CONTROL
IN SHARED ENVIRONMENT
Bing Qiao, Kecheng Liu and Chris Guy
School of Systems Engineering, University of Reading, Whiteknights, Reading, Berkshire, England
Keywords: Distributed artificial intelligence, intelligent agents.
Abstract: Multi-agent systems have been adopted to build intelligent environment in recent years. It was claimed that
energy efficiency and occupants’ comfort were the most important factors for evaluating the performance of
modern work environment, and multi-agent systems presented a viable solution to handling the complexity
of dynamic building environment. While previous research has made significant advance in some aspects,
the proposed systems or models were often not applicable in a “shared environment”. This paper introduces
an ongoing project on multi-agent for building control, which aims to achieve both energy efficiency and
occupants’ comfort in a shared environment.
1 INTRODUCTION
Intelligent sustainable healthy buildings improve
business value because they respect environmental
and social needs and occupants’ well-being, which
improves work productivity and human
performance.
MASBO (Multi-Agent System for Building
cOntrol) is an ongoing subproject of CMIPS
(Coordinated Management of Intelligent Pervasive
Spaces) project. It aims to provide a set of software
agents to support both online and offline
applications for intelligent work environment.
2 RELATED WORK
Developing software agents for intelligent building
control is an interdisciplinary task demanding
expertise in such areas as agent technology,
intelligent buildings, control network, and artificial
intelligence.
This section reviews previous work in this area
that could help build the core component of
MASBO: multi-agent system (MAS).
2.1 Agent Technology and Building
Intelligence
Research work conducted by (Davidsson and
Boman) uses a multi-agent system to control an
Intelligent Building. It is part of the ISES
(Information/Society/Energy/System) project that
aims to achieve both energy saving and customer
satisfaction via value added services. Energy saving
is realized by automatic control of lighting and
heating devices according to the presence of
occupants, while customer satisfaction is realized by
adapting light intensity and room temperature
according to occupants’ personal preferences.
While the discussed system is capable of
adjusting the heating and light level to meet personal
preferences, these preferences are predefined and
can not be adapted or learned according to the
feedback or behaviour of the occupants. It can detect
a person’s presence and adapt the room environment
settings according to his/her preferences via an
active badge system. The badge system itself,
however, does not provide the means to distinguish
between actuations from different occupants, which
is necessary for occupants’ behaviour learning
mechanisms proposed in some other research work
(Callaghan et al., 2001, Davidsson and Boman,
2005).
In (Callaghan et al., 2001, Davidsson and
Boman, 2005), a soft computing architecture is
discussed, based on a combination of DAI
159
Qiao B., Liu K. and Guy C. (2007).
MULTI-AGENT BUILDING CONTROL IN SHARED ENVIRONMENT.
In Proceedings of the Ninth International Conference on Enterprise Information Systems - AIDSS, pages 159-164
DOI: 10.5220/0002359301590164
Copyright
c
SciTePress
(distributed artificial intelligence), Fuzzy-Genetic
driven embedded-agents and IP internet technology
for intelligent buildings.
Besides the learning ability, this research also
presents another feature in some cases preferable for
intelligent building environment: user interaction
and feedback to the MAS. However its use of
embedded agents makes it difficult to take advantage
of sophisticated agent platforms and as claimed by
the researchers, places severe constraints on the
possible AI solutions.
Further research following (Callaghan et al.,
2001) is the iDorm project (Hagras et al., 2004),
where an intelligent dormitory is developed as a test
bed for a multiuse ubiquitous computing
environment. One of improvements of iDorm over
(Callaghan et al., 2001) is the introduction of iDorm
gateway server that overcomes many of the practical
problems of mixing networks. However, iDorm is
still based on embedded agents, which despite
demonstrating learning and autonomous behaviours,
are running on nodes with very limited capacity.
The requirement of user feedback or interactions
in intelligent building environment is controversial.
Some researchers claim that ambient intelligence
should not be intrusive, i.e., no special devices used
and no imposing rules on occupants’ behaviour. In
(Rutishauser et al., 2005), a multi-agent system is
discussed for intelligent building control. In contrast
to the approach in (Callaghan et al., 2001, Davidsson
and Boman, 2005), the MAS is equipped with an
unsupervised online real-time learning algorithm
that constructs a fuzzy rule-base, derived from very
sparse data in a non-stationary environment. All
feedback is acquired by means of observing
occupants’ behaviours without intruding on them.
While avoiding intrusiveness could be preferable in
some cases, the MAS loses the ability to distinguish
between actuations and preferences from different
occupants, and thus the preferences learned are not
coupled with the occupants but the room they are in.
By this way, it is unable to take into account
personal preferences.
2.2 Summary of Related Work
After reviewing previous research on multi-agent
systems for building control, a list of issues that may
need further studies have been summarized as
follows:
The personal preferences are often predefined
and can not be adapted or learned according to
the feedback or behaviour of the occupants.
Most systems do not provide a means to
distinguish between actuations from different
occupants, thus are not able to learn individual
preferences.
To learn preferences of occupants in a shared
environment, a single learning mechanism is
not capable of handling complex, dynamic
building environment.
Addressing both preferences learning and
multi-occupancy in a shared environment
complicates the design of the multi-agent
system.
A combination of environmental parameter
values is used as personal preferences. More
recent work in building construction indicates
that a function of such parameters more
accurately represents an occupant’s comfort or
satisfaction degree.
3 OVERVIEW OF MASBO
The design of a Multi-Agent System for Building
cOntrol (MASBO) emphasizes the dynamic
configuration of building facilities to meet the
requirements of building energy efficiency and the
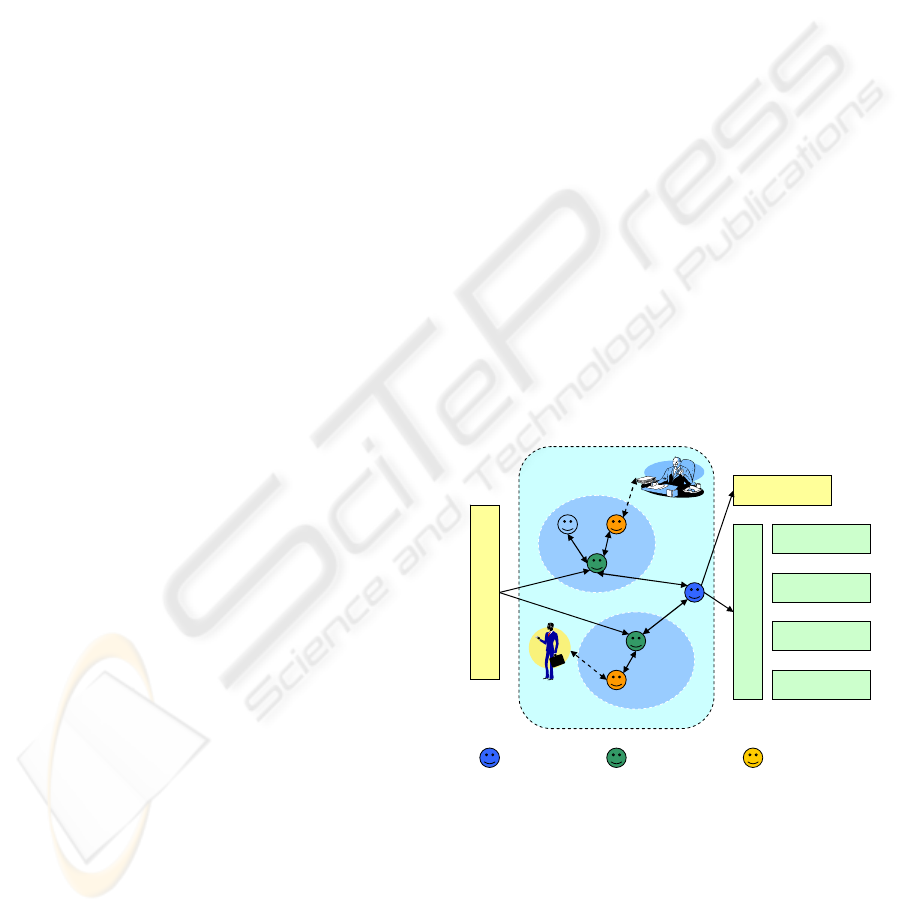
preferences of occupants. Fig. 1 shows the proposed
multi-agent system deployed in two zones. A zone
represents the basic unit of building structure under
MASBO’s control.
Figure 1: Scenario of MASBO. As the hub of CMIPS,
MASBO integrates with the other two components,
building assessment and wireless sensor network.
MASBO is designed as a system composed of a
number of software agents, capable of reaching
goals that are difficult to achieve by an individual
system (Wooldridge, 2002).
MASBO
Building Management System
HVAC Controller
CCTV Controller
Access Controller
Lighting Controller
Central Agent Local Agent Personal Agent
Building Assessment
Wireless Sensor Network
ICEIS 2007 - International Conference on Enterprise Information Systems
160

Personal agents act as assistants that manage user
(occupant) specific information, observe the ambient
environment, and present feedback from other
agents to their users (occupants).
Local agents act as mediator and information
provider. They reconcile contending preferences
from different occupants, learn occupants’
behaviour, and provide structure information of their
respective zones...
A central agent provides services that allow
operators to start or stop agents, deploy or delete
agents, and modify zone information for local
agents. It also aggregates decisions received from
local agents before converting them to BMS
(Building Management System) commands. If a
decision did not go through the central agent to
reach the BMS (has been abandoned or aggregated),
the corresponding local agent will be notified.
For a detailed discussion of agents defined in
MASBO, please refer to (Qiao et al., 2006).
4 DECISION MAKING AND
LEARNING
The design of decision-making and learning
components for MASBO aims to achieve such
flexibility that adapting the system to a dynamic,
shared building environment will just be a matter of
applying different static rules or data analysis
methods on dynamic rules.
4.1 Rules
Decision making and learning process in MASBO
are built upon rules (fuzzy rules when implemented
as a Fuzzy logic controller). A rule in MASBO is
defined as:
Antecedents and actions
Attributes
ID: the ID of the occupant who took the
action.
Priority: “safety”, “security” and
“economy” for static rules; “preference”
for dynamic rules.
Privilege: numbers, e.g. 0 ~ 9, for
making decision among conflicting
rules.
Weight: numbers, execution count, >=
1.
Predicted parameters Vector: a vector of
parameter values depicting the
environment resulted from an
occupant’s or an agent’s action.
Predicted TCI: The resulting TCI from
an occupant’s or an agent’s action. A
number of ways can be used to calculate
this, for instance by using the current
parameters just before executing next
rule.
Effective period: the time span of the
rule in effect, e.g., the interval between
consecutive rules.
Rules are categorised into two groups: static and
dynamic. Static rules are predefined by developers,
occupants, or building managers. They are static in
comparison to the dynamic rules that are generated
at runtime by the learning mechanisms of MASBO.
Static rules
If a zone has no occupants, it must
maintain some default environmental
settings.
If a zone is a corridor or belongs to any
other types of common zones, the
temperature is set with a default value
and the light is turned on only when at
least one person is in this zone.
If only one occupant is present in a non
common zone, such as an office, the
local agent must adapt the
environmental parameters to his/her
preferences.
If more than one occupant is present in
a non common zone, the local agent
needs to reconcile the contending
preferences according to the privileges
those occupants have in this zone.
If occupants' preferences conflict with
the rules applied on involved zone, the
local agent needs to reconcile the
conflicts according to the priorities
those rules have in this zone.
If actions have been taken by occupants
directly on the electrical equipment
instead of their personal agents, the
decisions made by the local agents in
MASBO can be overruled.
Dynamic rules are generated automatically by
the learning process
4.2 Decision Making
The input of decision making process is a
parameters Vector and occupant’s action. Local
agents will only conduct decision making and
learning activities when any of those events occur.
MULTI-AGENT BUILDING CONTROL IN SHARED ENVIRONMENT
161
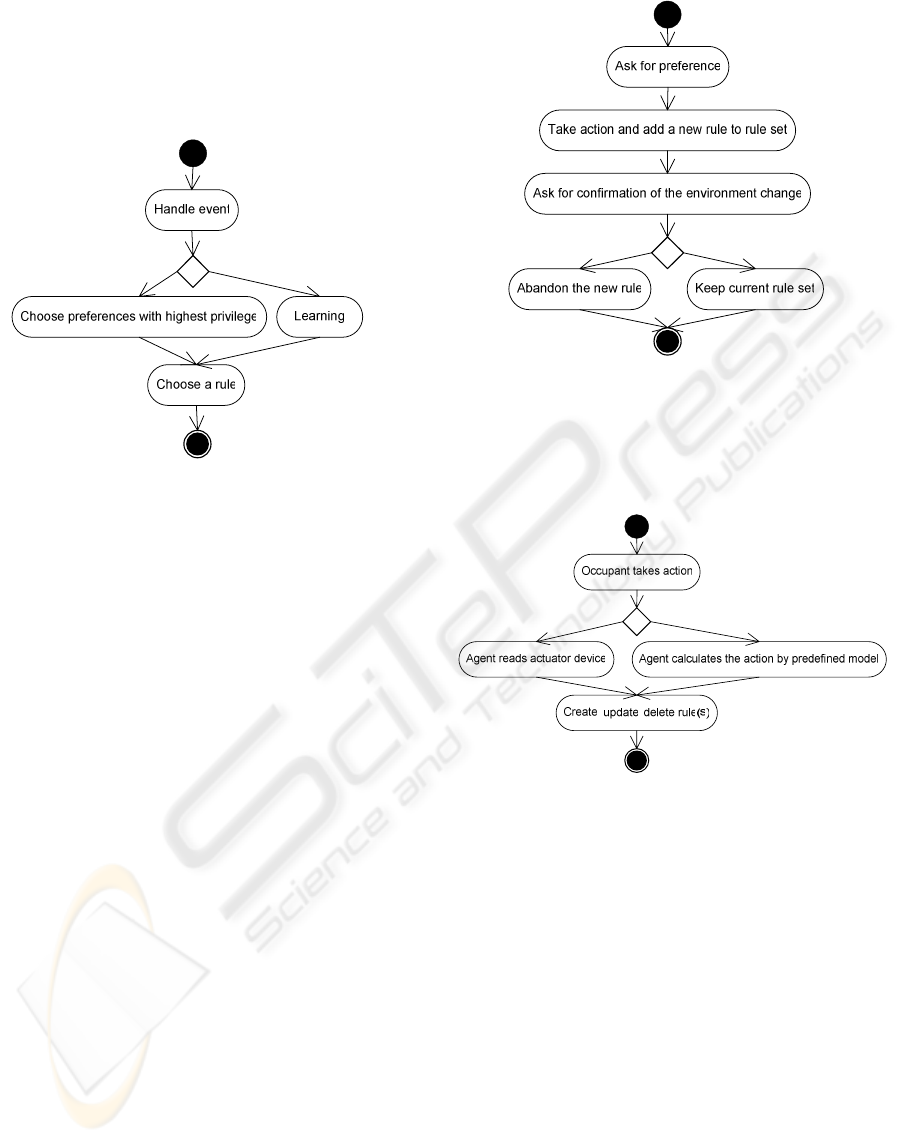
Otherwise, the sampled data will be discarded, as
shown in Fig. 2. Three such events are defined as
follows:
“Occupants changed” events (OC)
“Parameters changed” events (PC)
“Device operated” events (DO)
Figure 2: Decision making and learning: handling events,
making decisions and learning occupant’s behaviour.
Decision making needs to solve conflicts in the
following scenarios:
Preferences conflicting with static rule.
Decision will be made according their
priorities.
Occupants with different privilege.
Dynamic rules with the same antecedents but
different actions. Decision will be made
according to rule attributes such as weight,
predicted Vector, TCI, and effective period.
4.3 Learning
Different learning processes can be categorised into
three groups: interactive, supervised, and
reinforcement learning. MASBO adopts a
combination of those processes, aiming to reduce
intrusiveness of the multi-agent system, without
losing the capability of learning individual
preferences.
By interactive learning, the agent asks for
occupant’s preference for any given programmable
setting and tries to adjust its rule set to achieve this
setting. The occupant is then asked to confirm the
environment change, the result of which will help
the agent to either abandon the new rule or keep the
updated rule set. Interactive learning is shown in
Fig. 3.
By supervised learning, it assumes that the
agents know the action of the user by direct
communication between agent and actuator or by
building a model to indirectly calculate the user
action, as shown in Fig. 4.
Figure 4: Supervised learning: having direct information
of the action taken by an occupant on the actuator.
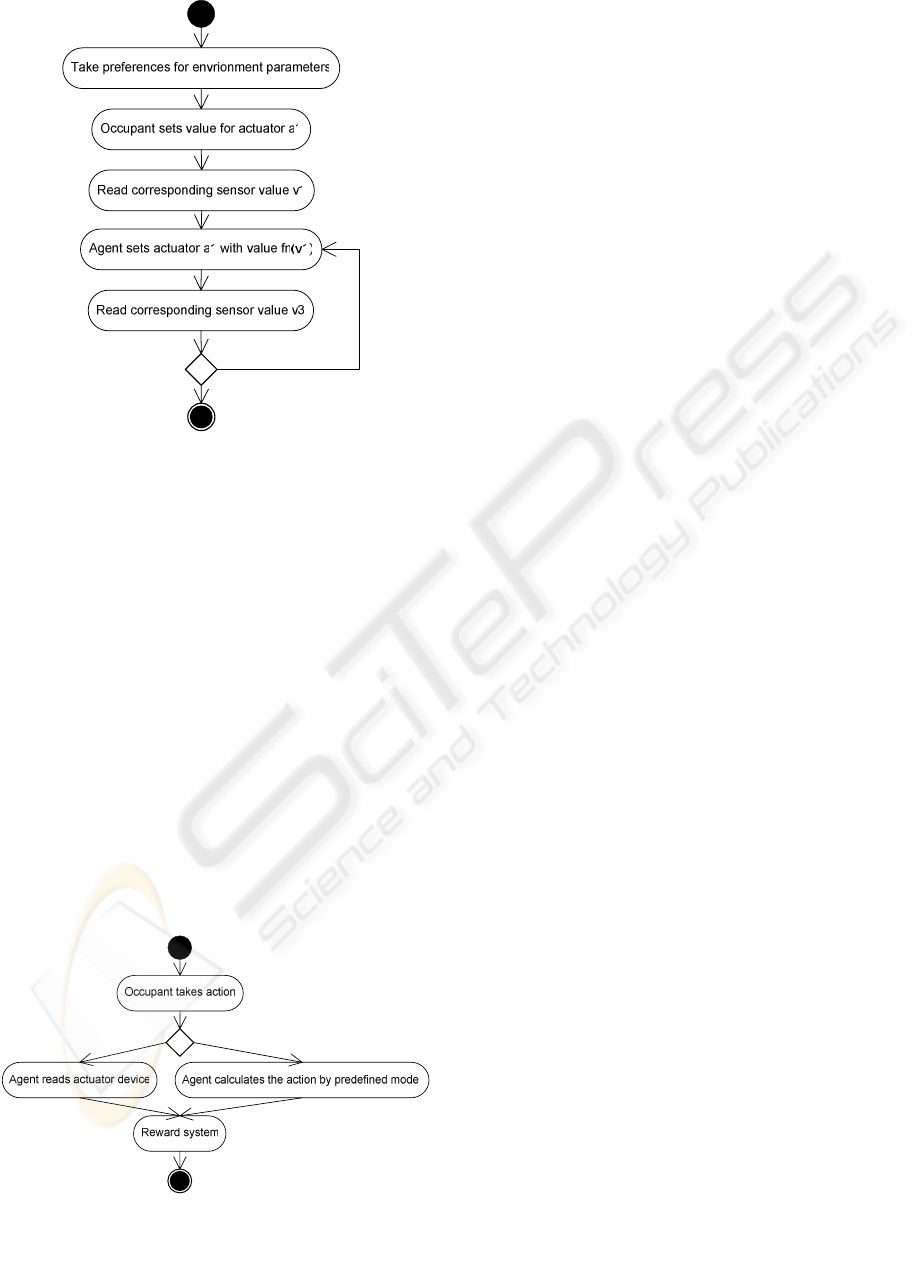
By reinforcement learning, the agent sets
environment parameters according to occupant’s
preferences, as shown in Fig. 5. The agent will try to
guess the value set on the actuator by trying to
minimize the difference between the results of user
action and agent action using the guessed value.
Even if direct information is known to the agent,
reinforcement learning could still be useful by
constructing a reward system, as shown in Fig. 6. If
an agent turns on a light and the occupant turns it
off, the agent would receive a negative
reinforcement. If the person does not change
anything the agent would receive a positive
reinforcement (reward).
Figure 3: Interactive learning
: asking confirmation from
the occupant.
ICEIS 2007 - International Conference on Enterprise Information Systems
162
4.4 Learning in MASBO
An occupant’s profile includes an ID and a number
of sets of preferences related to different
environmental contexts that define such attributes as
privilege, location, and time span.
A set of preferences is stored in a parameters
Vector. An occupant’s preferences are calculated
from all the dynamic rules produced for the related
occupant.
Learning occupants' preferences is conducted by
observing occupants' behaviour and identifying the
person who took the actions. Firstly, the less the
occupants need to instruct the building (e.g., adjust
the thermostat) to change the environment (in this
case, change the temperature), the more they are
satisfied. If the occupants are satisfied with the
current environment, the MASBO can assume that
the environment is preferable to the occupants and
thus calculate their preferences accordingly. On the
other hand, occupants change the environmental
settings via their personal agents and provide
feedback on their satisfaction if they would like to.
By this way, the environmental change can be traced
back to the exact person who made it and the
preference learned can be linked to this particular
individual instead of all occupants in the shared
space. This approach is a combination of the studies
in (Rutishauser et al., 2005, Callaghan et al., 2001).
It not only reduces intrusiveness of the MAS to
occupants, but also allows for the personalized space
for individuals.
The direct outcome of learning is a set of rules
that record the related occupant’s behaviour under
certain environment. The learning process does not
produce preferences. The preferences are calculated
from the learned rules. As defined in section 6.1, a
rule will have the following contents:
Input: (para1, …, parai, …, param)
Output: (action1, action2, …, actioni, …,
actionn)
Attributes: ID, priority, privilege, weight,
resulting(para1, …, parai, …, param),
resulting(TCI), period(start_time, end_time).
An occupant’s behaviour, recorded as a large
amount of rules, can be analysed using statistics or
data mined. Different strategies for analysing the
rules can provide different ways to update an
occupant’s preferences, for instance:
The predicted Vector of the first rule that has
been effective for more than “8” hours since
last update of preferences will be used to
update current preferences.
The predicted Vector of all the rules that,
grouped by predicted Vector, has the sum of
their weights increased “20” within one week
since last update of preferences will be used to
update current preferences.
If the preferences of occupant A have not been
changed for one week, and the sum of the
effective periods of A’s all rules during that
week is less than “5” hours, update them with
another occupant’s preferences that have taken
effect in most time of that week.
If the preferences of occupant A have not been
changed for “1” week, the preferences of
occupant A can be updated according to the
predicted Vector of the rule having TCI
valued “0” (comfort level in general) and the
biggest weight.
Figure 5:
Reinforcement learning: calculating the exact
action taken by an occupant.
Figure 6: Reinforcement learning: reward system.
MULTI-AGENT BUILDING CONTROL IN SHARED ENVIRONMENT
163

If the preferences of occupant A have not been
changed for “1” week, the TCI preference of
occupant A can be updated according to the
predicted TCI value that occurs most often
(personalised TCI value) in all related rules.
An occupant’s personal agent will negotiate with
local agents in respect of which learning mechanism
to be used for preferences learning. Such design of
occupant’s preferences, the rule, and the learning
process enables MASBO to search for the best
preferences learning mechanisms.
5 EVALUATION
Investigations have been made on previous similar
projects (Davidsson and Boman, Rutishauser et al.,
2005, Callaghan et al., Hagras et al., 2004) on how
to evaluate the model and eventually the
implemented system.
Qualitative simulation.
Energy consumption quantitative analysis that
compares the energy consumption of using or
not using MASBO.
Satisfaction quantitative analysis that checks
how well temperature or lighting history
records meet specified policies.
Satisfaction quantitative analysis that compares
the learned rules with the occupant’s journal
entries.
The number of rules learned over time that
indicates how well the Multi-agent system
performs.
6 CONCLUSIONS AND FUTURE
WORK
Many efforts have been made on using multi-agent
system for intelligent building control. However,
while previous work has addressed most of the
important features for MAS based intelligent
building control, we claim that no research has been
done to consider all the following requirements:
Energy efficiency and occupants' comfort
Preferences learning in shared environment
Personalized control and feedback
Human readable and accurate knowledge
representation
Sophisticated agent platform and techniques
We believe above requirements are essential to a
successful intelligent building environment and a
complete solution should be able to tackle all of
them. The first four requirements have been
discussed in this paper. The fifth requirement was
presented in (Qiao et al., 2006). The last requirement
will be addressed in the next step of this project.
Future work will be carried out in the following
steps 1) testing different strategies for preferences
learning and decision making in a simulated
environment; 2) developing MASBO on advanced
agent platform; 3) system integration with wireless
sensor network and building automation system, and
4) evaluation by experiments in real world buildings.
ACKNOWLEDGEMENTS
This paper is based on the research outcomes of
CMIPS project, sponsored by the Department of
Trade and Industry, UK. The project is a
collaborative work between University of Reading,
Thales PLC and Arup Group Ltd.
REFERENCES
Callaghan, V., Clarke, G., Colley, M. & Hagras, H. (2001)
A Soft-Computing DAI Architecture for Intelligent
Buildings. Soft Computing Agents: New Trends for
Designing Autonomous Systems. Springer-Verlag.
Davidsson, P. & Boman, M. (1998) Energy Saving and
Value Added Sevices: Controlling Intelligent
Buildings Using a Multi-Agent Systems Approach.
DA/DSM Europe DistribuTECH. PennWell.
Davidsson, P. & Boman, M. (2005) Distributed
Monitoring and Control of Office Buildings by
Embedded Agents. Information Sciences, 171, 293-
307.
Hagras, H., Callaghan, V., Colley, M., Clarke, G., Pounds-
Cornish, A. & Duman, H. (2004) Creating an
Ambient-Intelligence Environment Using Embedded
Agents. IEEE Intelligent Systems, 19, 12-20.
Qiao, B., Liu, K. & Guy, C. (2006) A Multi-Agent System
for Building Control. IEEE/WIC/ACM International
Conference on Intelligent Agent Technology. Hong
Kong.
Rutishauser, U., Joller, J. & Douglas, R. (2005) Control
and Learning of Ambience by an Intelligent Building.
IEEE Transactions on Systems, Man, and Cybernetics,
Part A: Systems and Humans, 35, 121-132.
Wooldridge, M. (2002) Introduction to MultiAgent
Systems, Wiley.
ICEIS 2007 - International Conference on Enterprise Information Systems
164
