
SILENT BILINGUAL VOWEL RECOGNITION
Using fSEMG for HCI based Speech Commands
Sridhar Poosapadi Arjunan
School of Electrical and Computer Engineering, RMIT University,GPO Box 2476V, Melbourne, VIC 3001, Australia
Hans Weghorn
Information technology, BA-University of Cooperative Education, Rotebuehlplatz 41, 70178 Stuttgart, Germany
Dinesh Kant Kumar, Wai Chee Yau
School of Electrical and Computer Engineering, RMIT University,GPO Box 2476V, Melbourne, VIC 3001, Australia
Keywords: HCI, Speech Command, Facial Surface Electromyogram, Artificial Neural Network, Bilingual variation.
Abstract: This research examines the use of fSEMG (facial Surface Electromyogram) to recognise speech commands
in English and German language without evaluating any voice signals. The system is designed for
applications based on speech commands for Human Computer Interaction (HCI). An effective technique is
presented, which uses the facial muscle activity of the articulatory muscles and human factors for silent
vowel recognition. The difference in the speed and style of speaking varies between experiments, and this
variation appears to be more pronounced when people are speaking a different language other than their
native language. This investigation reports measuring the relative activity of the articulatory muscles for
recognition of silent vowels of German (native) and English (foreign) languages. In this analysis, three
English vowels and three German vowels were used as recognition variables. The moving root mean square
(RMS) of surface electromyogram (SEMG) of four facial muscles is used to segment the signal and to
identify the start and end of a silently spoken utterance. The relative muscle activity is computed by
integrating and normalising the RMS values of the signals between the detected start and end markers. The
output vector of this is classified using a back propagation neural network to identify the voiceless speech.
The cross-validation was performed to test the reliability of the classification. The data is also tested using
K-means clustering technique to determine the linearity of separation of the data. The experimental results
show that this technique yields high recognition rate when used for all participants in both languages. The
results also show that the system is easy to train for a new user and suggest that such a system works
reliably for simple vowel based commands for human computer interface when it is trained for a user, who
can speak one or more languages and for people who have speech disability.
1 INTRODUCTION
In this advancing world of technology, there are
many developments being made in the field of
computing. Research and development of new
human computer interaction (HCI) techniques that
enhance the flexibility and reliability for the user are
important. The most fundamental applications of
affective computing would be human-computer
interaction, in which the computer is able to detect
and track commands coming from human users, and
to handle communication based on this knowledge.
Research on new methods of computer control has
focused on various types of body functions like
speech, emotions, bioelectrical activity, facial
expressions, etc. The expression of emotions plays
an important part in human interaction. Most of the
facial movements result from either speech or the
display of emotions; each of these has its own
complexity (Ursula and Pierre, 1998).
Speech operated systems have the advantage
that these provide flexibility, and can be considered
68
Poosapadi Arjunan S., Weghorn H., Kant Kumar D. and Chee Yau W. (2007).
SILENT BILINGUAL VOWEL RECOGNITION - Using fSEMG for HCI based Speech Commands.
In Proceedings of the Ninth International Conference on Enterpr ise Information Systems - HCI, pages 68-75
DOI: 10.5220/0002365400680075
Copyright
c
SciTePress

for any applications where natural language may be
used. Such systems utilise a natural ability of the
human user, and therefore have the potential for
making computer control effortless and natural.
Furthermore, due to the very dense information that
can be coded in speech, speech based human
computer interaction (HCI) can provide richness
comparable to human-to-human interaction.
In recent years, significant progress has been
made in speech recognition technology, making
speech an effective modality in both telephony and
multimodal human-machine interaction. Speech
recognition systems have been built and deployed
for numerous applications. The technology is not
only improving at a steady pace, but is also
becoming increasingly usable and useful. However,
speech recognition technology using voice signals
has three major shortcomings - it is not suitable in
noisy environments such as vehicles or factories, not
applicable for people with speech impairment
disability such as people after a stroke attack, and it
is not applicable for giving discrete commands when
there may be other people talking in vicinity.
This research reports how to overcome these
shortcomings with a voice recognition approach,
which identifies silent vowel-based verbal
commands without the need to sense the voice sound
output of the speaker. Possible users of such a
system would be people with disability, workers in
noisy environments, and members of the defence
forces. When we speak in noisy environments, or
with people with hearing deficiencies, the lip and
facial movements often compensate the lack of
audio quality.
The identification of speech by evaluating lip
movements can be achieved using visual sensing, or
tracking the movement and shape using mechanical
sensors (Manabe et al., 2003), or by relating the
movement and shape to facial muscle activity (Chan
et al., 2002; Kumar et al., 2004). Each of these
techniques has strengths and limitations. The video
based technique is computationally expensive,
requires a camera monitoring the lips that is fixed to
a view of the speaker’s head, and it is sensitive to
lighting conditions. The sensor based technique has
the obvious disadvantage that it requires the user to
have sensors fixed to the face, making the system
not user friendly. The muscle monitoring systems
have limitations in terms of low reliability. In the
following sections, the approach is reported of
recording activity of the facial muscles (fEMG) for
determining silently commands from a human
speaker.
Earlier work reported by the authors have
demonstrated the use of multi-channel surface
electromyogram (SEMG) to identify the unspoken
vowel based on the normalized integral values of
facial EMG during the utterance, and this
construction had been tested with native Australian
English speakers. The main concern with such
systems is the difficulty to work across people of
different backgrounds, and the main challenge is the
ability of such a system to work for people of
different languages – native ones as well as foreign
ones. Consequently, in this particular work the error
in classification of the unvoiced English and German
vowels by a group of German native speakers are
compared. Hence, this investigation covers the
application case of two different languages used by
native speakers, and the case of speakers talking and
commanding in a foreign language.
2 THEORY
This research aims to recognize the multi-channel
surface electromyogram of the facial muscle with
speech and identify the variation in the accuracy of
classification for two different languages, German
and English. Articulatory phonetics considers the
anatomical detail of the utterance of sounds. This
requires the description of speech sounds in terms of
the position of the vocal organs, and it is convenient
to divide the speech sounds into vowels and
consonants. The consonants are relatively easy to
define in terms of shape and position of the vocal
organs, but the vowels are less well defined and this
may be explained because the tongue typically never
touches another organ when making a vowel
(Parsons, 1986). When considering speech
articulation, the shapes of the mouth during speaking
vowels remain constant while during consonants the
shape of the mouth changes.
2.1 Face Movement and Muscles
Related to Speech
The human face can communicate a variety of
information including subjective emotion,
communitive intent, and cognitive appraisal. The
facial musculature is a three dimensional assembly
of small, pseudo-independently controlled muscular
lips performing a variety of complex orfacial
functions such as speech, mastication, swallowing
and mediation of motion (Lapatki et al., 2003).
When using facial SEMG to determine the shape of
lips and mouth, there is the issue of the proper
SILENT BILINGUAL VOWEL RECOGNITION - Using fSEMG for HCI based Speech Commands
69
choice of muscles and the corresponding location of
the electrodes, and also the difficulty of cross talk
due to the overlap between the different muscles.
(Chan et al., 2002) demonstrated the presence of
speech information in facial myoelectric signals
using an SEMG based system. (Kumar et al., 2004)
have demonstrated the use of SEMG to identify
unspoken sounds under controlled conditions. More
algorithmic details for dedicatedly classifying facial
muscle activity during vowel-based speech
previously were reported in (Arjunan et al., 2006).
Applying integral RMS of SEMG is useful in
overcoming the issues of cross talk and the temporal
difference between the activation of the different
muscles that may be close to one set of electrodes. It
is impractical to consider the entire facial muscles
and record their electrical activity.
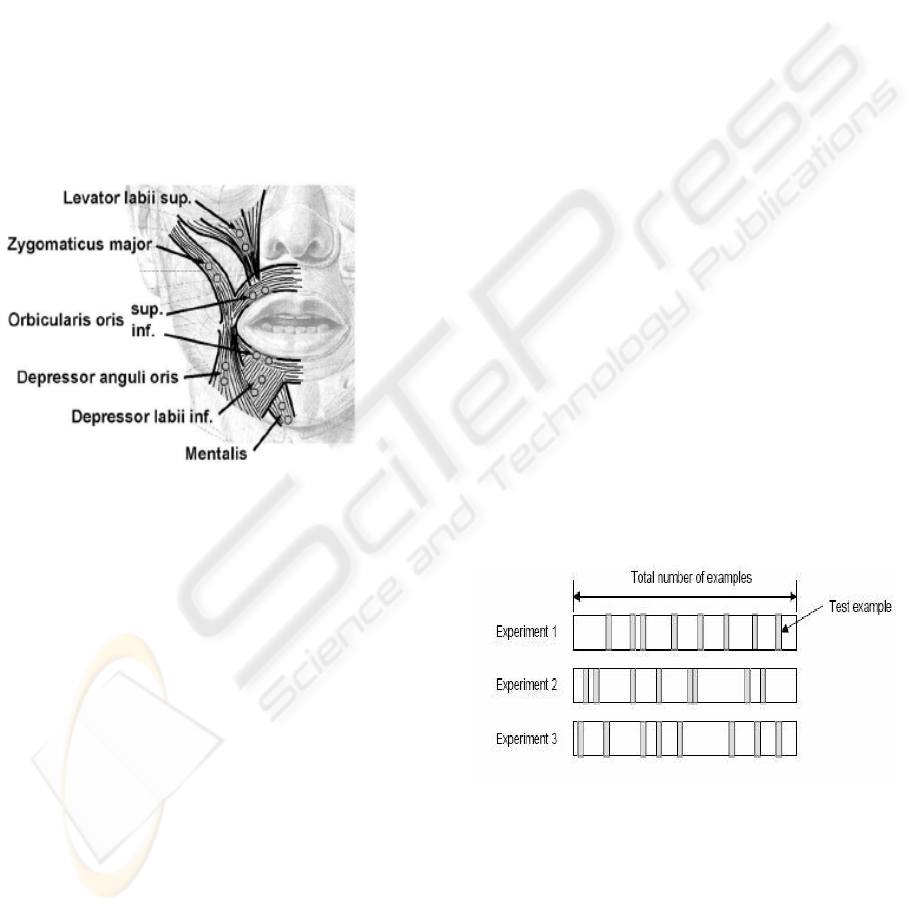
Figure 1: Topographical location of facial muscles
[Source: (Lapatki et al., 2003)].
In this study, only the following four facial
muscles have been selected: Zygomaticus Major,
Depressor anguli oris, Masseter and Mentalis
(Fridlund and Cacioppo, 1986). The placement of
electrodes and location of these muscles are shown
in Figure 1. With the variation in speed and
pronunciation of speaking, and the length of each
sound in different languages, it is difficult to
determine an appropriate window in time domain for
best signal analysis. When the properties of the
signal are time varying, identifying suitable features
for classification will be less robust.
2.2 Features of SEMG
Surface electromyogram (SEMG) is a gross
indicator of the muscle activity and is used to
identify force of muscle contraction, associated
movement and posture. SEMG is a complex non-
stationary signal. The strength of SEMG is a good
measure of the strength of contraction of the muscle,
and it can be related to the movement and posture of
the corresponding part of the body (Basmajian and
Deluca, 1985). Root Mean Square (RMS) of SEMG
is related to the number of active muscle fibers and
the rate of activation, and is a good measure of the
strength of the muscle activation, and thus the
strength of the force of muscle contraction. The
issue regarding the use of SEMG to identify speech
is the large variability of SEMG activity pattern
associated with a phoneme of speech (Basmajian
and Deluca, 1985). While it is relatively simple to
identify the start and the end of the muscle activity
related to the vowel, the muscle activity at the start
and the end may often be much larger than the
activity during the section, when the mouth cavity
shape is being kept constant, corresponding to the
vowel. To overcome the issue of variation in speed
and pronunciation of vowels, this research
recommends the use of the integration of the RMS
of SEMG from the start till the end of the utterance
of the vowel. This paper reports the use of
normalised values of the integral of RMS of SEMG
from the different muscles to reduce the large inter-
experimental variation.
2.3 Statistical Analysis using
Cross-validation
Cross-validation is the statistical practice of
partitioning a sample of data into subsets such that
the analysis is initially performed on a single subset,
while the other subset(s) are retained for subsequent
use in confirming and validating the initial analysis.
Figure 2: Random sub-sampling cross validation. [Source:
(Gutierrez-Osuna, 2001)].
The initial subset of data is called the training
set; the other subset(s) are called validation or
testing sets. The holdout method is the simplest kind
of cross validation. The data set is separated into two
sets, called the training set and the testing set. The
function approximator fits a function using the
training set only. Then the function approximator is
ICEIS 2007 - International Conference on Enterprise Information Systems
70
asked to predict the output values for the data in the
testing set (it has never seen these output values
before). The obtained errors are accumulated as
before to determine the mean absolute test set error,
which is used to evaluate the model. For having a
random selection of training and testing data sets,
Random Sub sampling Cross-validation method was
used. Random Sub sampling performs k data splits
of the dataset as shown in Figure 2. Each split
randomly selects a (fixed) number of examples
without replacement. For each data split we retrain
the classifier from scratch with the training examples
and estimate with the test examples. The true
classification accuracy is obtained as the average of
the separate estimates (Gutierrez- Osuna, 2001). The
training and testing was done using Artificial Neural
Network architecture with back propagation
algorithm.
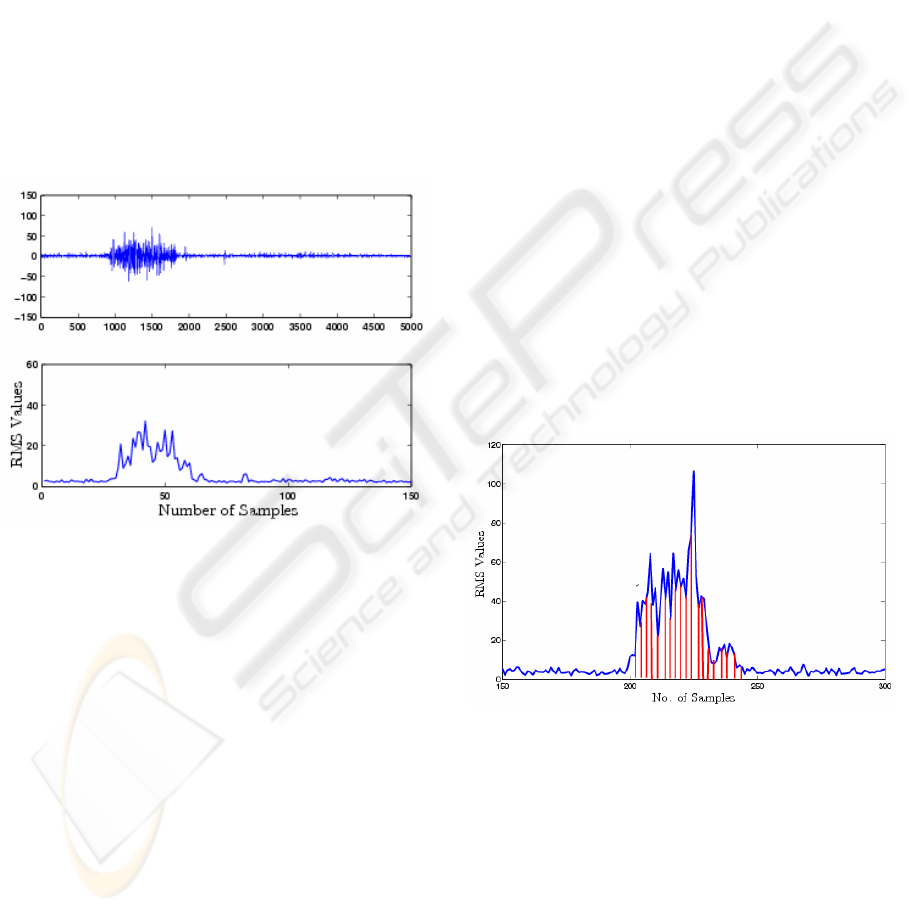
Figure 3: Recorded raw EMG signal and its RMS plot.
3 METHODOLOGY
Experiments were conducted to evaluate the
performance of the proposed speech recognition
from facial SEMG for two different languages,
German and English. The experiments were
approved by the Human Experiments Ethics
Committee of the University. In controlled
experiments, participants were asked to speak while
their SEMGs were recorded. The SEMG recordings
were visually observed, and all recordings with any
artefacts – typically due to loose electrodes or
movement – were discarded. During these
recordings, the participants spoke three selected
English vowels (/a/,/e/,/u/) and three selected
German vowels (/a/,/i/,/u/). Each vowel was spoken
separately such that there was a clear start and end
of its utterance. The experiment was repeated ten
times for each language. A suitable resting time was
granted to the speakers between each experiment.
The participants were asked to vary their speaking
speed and style to obtain a wide training set.
3.1 EMG Recording and Processing
In an earlier reference investigation, three male
volunteers participated who are English native
speakers, while in the present investigation, one
female plus two male volunteers participated in the
experiments. All the participants in this second
experimental run were native speakers of German
with English as their second language.
Four channel facial SEMG was recorded using
the recommended recording guidelines (Fridlund
and Cacioppo, 1986). A four channel, portable,
continuous recording MEGAWIN instrument (Mega
Electronics, Finland) was used for this purpose. Raw
signal was recorded at a rate of 2000 samples per
second. Ag/AgCl electrodes (AMBU Blue sensors
from MEDICOTEST, Denmark) were mounted on
appropriate locations close to the selected facial
muscles. The recordings were visually observed, and
all recordings with any artefacts were discarded.
Figure 3 shows the raw EMG signal recording, and
its RMS values plotted as a function of time domain
denoted by the corresponding sample number.
Figure 4: Example RMS integration of SEMG.
3.2 Data Analysis
The first step in the analysis of the data was to
identify the temporal location of the muscle activity.
Moving root mean square (MRMS) of the recorded
signal with a threshold of 1 sigma of the signal was
applied for windowing and identifying the start and
the end of the active period (Freedman et al., 1997).
A Window size of 20 samples corresponding to
10 ms was used for computing the MRMS.
SILENT BILINGUAL VOWEL RECOGNITION - Using fSEMG for HCI based Speech Commands
71
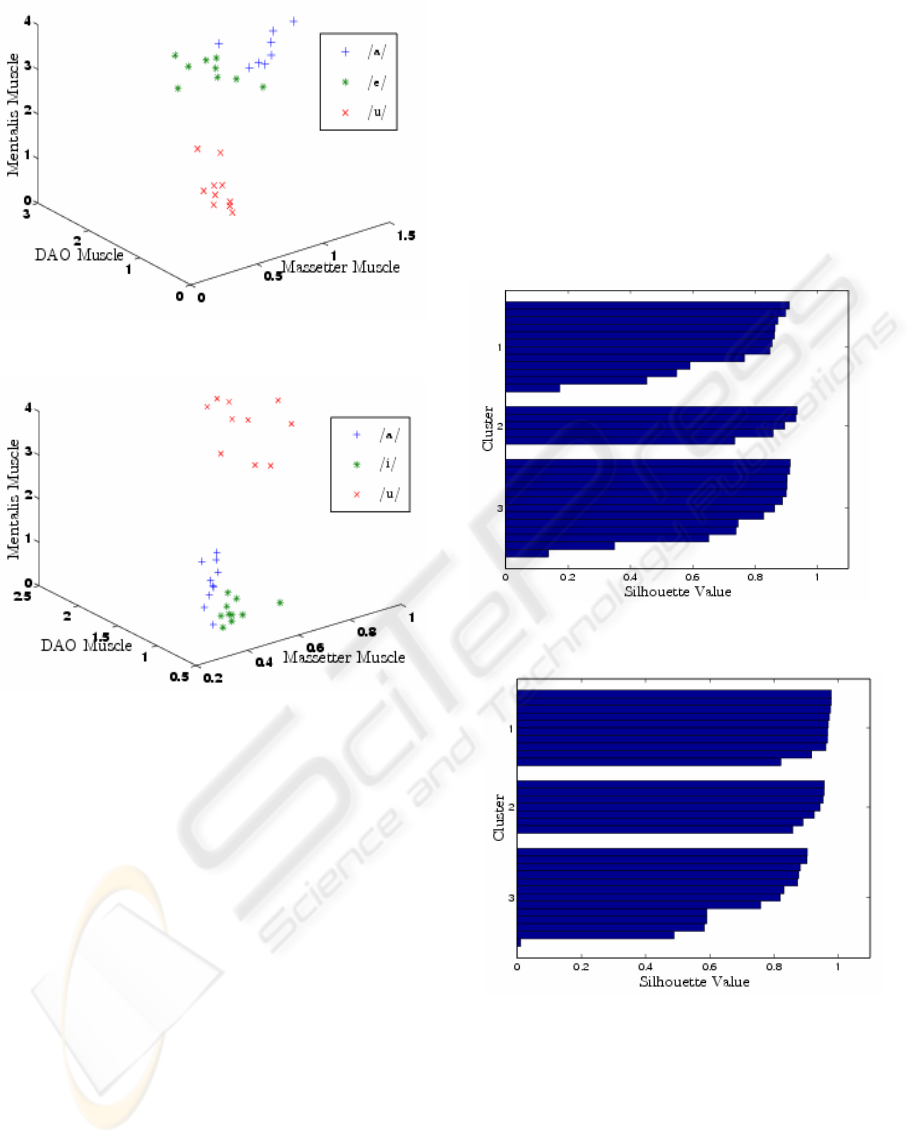
(a)
(b)
Figure 5: 3-D plot of the normalised IRMS values for (a)
English Vowels, and for (b) German Vowels.
The start and the end of the muscle activity were
also confirmed visually. The next step was to
parameterise the SEMG for classification of the
data. MRMS values of SEMG between the start and
the end of the muscle activity was integrated for
each of the channels. This provided a four long
vector corresponding to the overall activity of the
four channels for each vowel utterance. This data
was normalised by computing a ratio of integrated
MRMS of each channel with respect to channel
number one. This ratio is indicative for the relative
strength of contraction of the different muscles and
reduces the impact of inter-experimental variations.
The outcome of this step was a vector of length three
corresponding to each utterance. Figure 4 is an
example of the computation of the integral of RMS
of SEMG. For computing the integral of RMS of
SEMG, Durand’s rule (Beyer, 1987) was used,
because it produces approximations that are more
accurate, since these represent a straightforward
family of numerical integration techniques.
3.3 Classifying of Normalised Features
of Facial SEMG
For classification, parameterised SEMG data
resulting in a vector with three measures for each
utterance was used. The first step was to determine,
if this data is separable.
(a)
(b)
Figure 6: Silhouette plot of the normalised IRMS values
for (a) English Vowels, and (b) German Vowels.
After confirming this, the next step was to
determine whether the data is linearly separable. A
supervised neural network approach was used for the
separation step. The advantage of using a neural
network is that such networks can be applied
ICEIS 2007 - International Conference on Enterprise Information Systems
72
without the assumption for a possible linear
separation of the data. For this purpose, the data
from the ten experiments for each vowel uttered by
one individual participant was divided into two
groups - training and test data.
This was repeated for English and German
language separately. The ANN consisted of two
hidden layers with 20 nodes in both layers. Sigmoid
function was used as the threshold decision. ANN
was trained with gradient descent algorithm using a
momentum with a learning rate of 0.05 to reduce the
likelihood of local minima. Finally, the trained ANN
was used to classify the test data. This entire process
was repeated for each of the participants. The
performance of these integral RMS values was
evaluated by comparing the accuracy in the
classification during testing. The accuracy was
calculated as ratio of the percentage of correctly
classified data points and the total number of data
points in the class.
The next step in the classification of this data
was to test, whether the data was linearly separable.
Taking advantage of the three dimension in the data,
three axis plot was produced. In this, data points
representing each vowel were given a specific colour
and distinct symbol for visual inspection. Figure 5
shows example of such a plot, for each of the
investigated languages. The K-means clustering
technique was performed to test the data for linear
separability. To get an idea of how well-separated
the resulting clusters are, a silhouette plot was made
using the cluster indices output from k-means. The
silhouette plot in Figure 6 displays a measure of
closeness of each point in one cluster to points in the
neighbouring clusters.
3.4 Statistical Analysis of Classification
Accuracy
Random Sub sampling cross-validation method was
used to determine the mean classification accuracy
of the normalised features of facial SEMG. The
training and testing of different random sub samples
using ANN was repeated for different times. The
final classification accuracy is the average of
individual estimates as in Eqn.1.
∑
=
×=
K
i
ncKA
1
)/(/1 (1)
where c = number of correctly classified utterances
n = total number of utterances
K = total repetition count of training and testing
4 RESULTS AND OBSERVATIONS
The linear separation of normalised IRMS values of
different vowels was tested using three dimensional
plot and silhouette plot. It is observable from the 3-
D plots in Figure 5, that there appears distinct
clustering of the data based on the vowel uttered for
both languages.
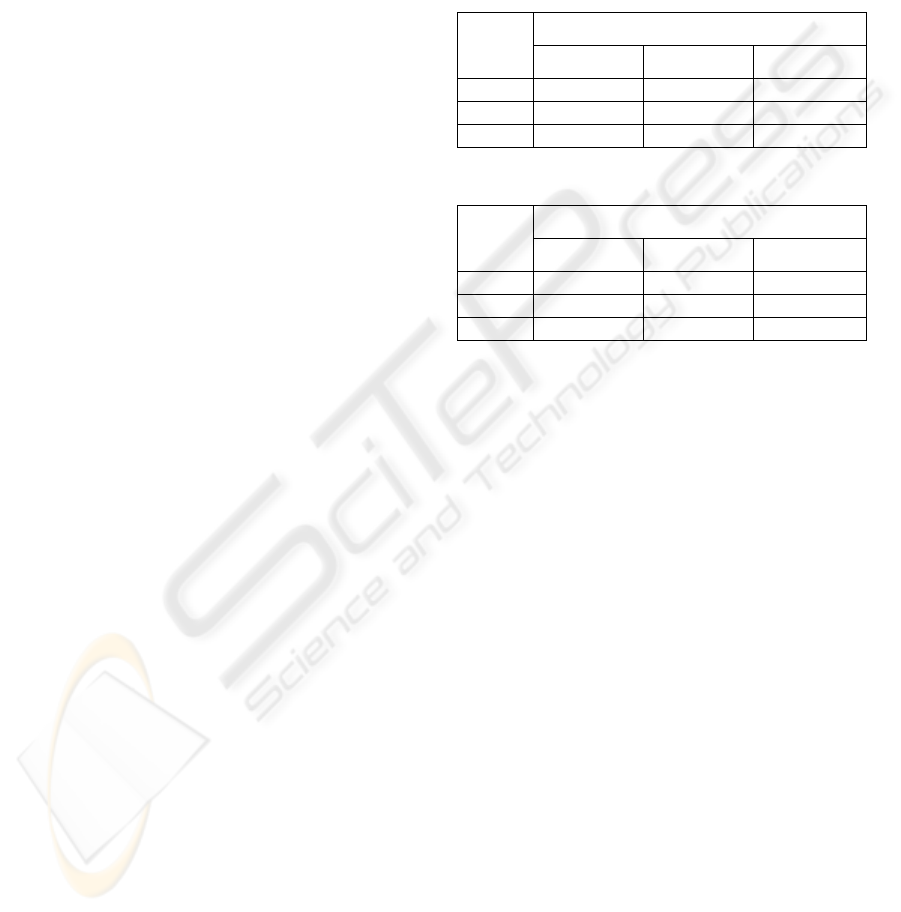
Table 1: Mean classification accuracy for English vowels.
Mean Classification accuracy
Vowels
Participant 1 Participant 2
Participant 3
/a/ 73.3% 83.3% 80.0%
/e/ 76.7% 76.7% 83.3%
/u/ 100.0% 100.0% 100.0%
Table 2: Mean classification accuracy for German vowels.
Mean Classification accuracy Vowels
Participant 1 Participant 2
Participant 3
/a/ 86.7% 83.3% 83.3%
/i/ 96.7% 80.0% 76.7%
/u/ 100.0% 100.0% 100.0%
This is also verified using k-means Silhouette
plot (Figure 6): it is clear that most points have a
large silhouette value, indicating that the clusters are
separated from each other and this suggests that
there exists a linear separation of the data. The
average silhouette values for English vowels and
German vowels are 0.7634 and 0.8441 respectively.
This shows that the linear separation of data is
stronger in German vowels (native language of the
speaker) than English vowels (foreign language).
Table 1 shows the ANN classification results on the
test data using weight matrix generated during
training for English vowels, and Table 2 lists these
values for German vowels. These results indicate
that the mean classification accuracy of the integral
RMS values of the EMG signal yields better
recognition rate of vowels for 3 different
participants, when it is trained individually. The
results indicate that this technique can be used for
the classification of vowels for the native and
foreign language – in this case – English and
German. This suggests that the system is able to
identify the differences between the styles of
speaking of different people at different times for
different languages.
SILENT BILINGUAL VOWEL RECOGNITION - Using fSEMG for HCI based Speech Commands
73

4.1 Variation in Classification Error
for Native and Foreign Language
Figure 7 shows the variation in error rate for German
and English vowels. The error rate in classification
accuracy for a foreign language (English) is
marginally high when compared with the native
language (German). This is due to the muscle pattern
remaining same during the utterance of the native
1 2 3
0
5
10
15
20
25
30
Partici
p
ants
Error Rate
German
English
Figure 7: Error bar plots for classification of English and
German Vowel - /a/.
1 2 3
0
5
10
15
20
25
Participants
Error rate
German
English
Figure 8: Error bar plots for classification rates of the
German vowel - /i/ and the English Vowel - /e/.
language and changes during the utterance of the
foreign language. The variation is high for German
vowels /a/, /i/ and English vowels /a/, /e/ and there is
no variation for the vowel /u/ in both German and
English language. This can also be seen from the
data pattern for both the languages (3-D Plot) in
Figure 5.
5 DISCUSSION
The results indicate that the proposed method using
activities of facial muscles for identifying silently
spoken vowels is technically feasible from the view
point of error in identification. The investigation
reveals the suitability of the system for English and
German, and this suggests that the system is feasible
when used for people speaking their own native
language as well as a foreign language.
The results also indicate that the system is not
disturbed by the variation in the speed of utterance.
The recognition accuracy is high, when it is trained
and tested for a dedicate user. Hence, such a system
could be used by any individual user as a reliable
human computer interface (HCI). Up to now, this
method has only been tested for limited vowels.
Vowels were considered at first, because the muscle
contraction during the utterance of vowels remains
stationary.
The promising results obtained in the experiment
indicate that this approach based on the facial
muscles movement represents a suitable and reliable
method for classifying vowels of single user without
regard to speaking speed and style in different times
for different languages. It should be pointed out that
this method at this stage is not being designed to
provide the flexibility of regular conversation
language, but for a limited dictionary only, which is
appropriate for simple voice control systems. The
results furthermore suggest that such a system is
suitable and reliable for simple commands for
human computer interface when it is trained for the
user. This method has to be enhanced for large set of
data with many subjects in future.
6 CONCLUSIONS
This work describes a silent vowel based speech
recognition approach that works with measuring the
facial muscle contraction using non-invasive SEMG.
Application of this includes, e.g., removal of any
disambiguity caused by the acoustic noise for human
computer interface or computer based speech
analysis. The presented investigation focused on
classifying English and German vowels, because
pronunciation of vowels results in stationary muscle
contraction as compared to consonants.
The system has been tested with a very small set
of phonemes, where the system has been successful.
The recognition accuracy is high, when it is trained
and tested for a dedicate user. It should be pointed
out that this method at this stage is not yet designed
to provide the flexibility of regular conversation
language, but for a limited dictionary only, which is
appropriate for simple voice control systems. This
ICEIS 2007 - International Conference on Enterprise Information Systems
74

method has to be enhanced for large set of data with
many subjects in future.
One basic application for such a system is for
disabled user to give simple commands to a
machine, which would be a helpful and typical
application of HCI. Future applications of such a
system, e.g., cover Internet access for people on the
move while using their mobile devices, or when they
are in public places. Further possibilities especially
include applications for telephony, defence
problems, and improvement of speech-based
computer control in general in any noisy
environment.
REFERENCES
Arjunan, S.P., Kumar, D.K., Yau, W.C., Weghorn, H.
(2006). Unvoiced speech control based on vowels
detected by facial surface electromyogram. In
Proceedings of IADIS international conference e-
Society 2006, Dublin, Ireland, Vol. I, pp. 381-388.
Basmajian, J. V. and Deluca, C. J. (1985). Muscles Alive:
Their Functions Revealed by Electromyography.
Williams and Wilkins, Baltimore, fifth edition.
Beyer, W. H. (Ed.) (1987). CRC Stndard Mathematical
Tables. CRC press, Boca Raton, 28
th
edition. p. 127
Chan, A., Englehart, K., Hudgins, B., and Lovely, D.
(2002). A multi-expert speech recognition system
using acoustic and myoelectric signals. In Proceedings
of 24th Annual Conference and the Annual Fall
Meeting of the Biomedical Engineering Society,
Ottawa, Canada, Vol. 1, pp. 72-73. IEEE.
Freedman, D., Pisani, R., and Purves, R. (1997). Statistics.
Norton College Books, New York, third edition.
Fridlund, A. and Cacioppo, J. (1986). Guidelines for
human electromyographic research. In Journal of
Psychophysiology, Vol. 23, No. 4, pp. 567-589. The
Society for Psychophysiologial Research.
Gutierrez-Osuna, R. (2001). Lecture 13: Validation. In
http://research.cs.tamu.edu/prism/lectures/iss
Last access: October 2006. Wright State University.
Kumar, S., Kumar, D., Alemu, M., and Burry, M. (2004).
EMG based voice recognition. In Proceedings of
Intelligent Sensors, Sensor Networks and Information
Processing Conference, Melbourne, Australia. IEEE.
Lapatki, B. G., Stegeman, D. F., and Jonas, I. E. (2003). A
surface EMG electrode for the simultaneous
observation of multiple facial muscles. In Journal of
Neuroscience Methods, Vol. 123, No. 2, pp. 117-128.
Manabe, H., Hiraiwa, A., and Sugimura, T. (2003).
Unvoiced speech recognition using SEMG- mime
speech recognition. In ACM Conference on Human
Factors in Computing Systems, Ft.Lauderdaler,
Florida, USA, pp. 794-795.
Parsons, T. W. (1986). Voice and speech processing.
McGraw-Hill Book Company, New York, first
edition. Ursula, H. and Pierre, P. (1998). Facial
reactions to emotional facial expressions: affect or
cognition? In Cognition and Emotion, Vol. 12 No.4.
SILENT BILINGUAL VOWEL RECOGNITION - Using fSEMG for HCI based Speech Commands
75
