
PLATFORM TO DRIVE AN INTELLIGENT WHEELCHAIR
USING FACIAL EXPRESSIONS
Pedro Miguel Faria, Rodrigo A. M. Braga, Eduardo Valgôde and Luís Paulo Reis
LIACC – Artificial Intelligence and Computer Science Lab. – University of Porto, Portugal
FEUP – Faculty of Engineering of University of Porto, Rua Dr. Roberto Frias, s/n, 4200-465 Porto, Portugal
Keywords: Human-computer interface, computer vision, image processing, artificial intelligence, intelligent
wheelchair.
Abstract: Many of the physically injured use electric wheelchairs as an aid to locomotion. Usually, for commanding
this type of wheelchair, it is required the use of one’s hands and this poses a problem to those who, besides
being unable to use their legs, are also unable to properly use their hands. The aim of the work described
here, is to create a prototype of a wheelchair command interface that do not require hand usage. Facial
expressions were chosen instead, to provide the necessary visual information for the interface to recognize
user commands. The facial expressions are captured by a digital camera and interpreted by an application
running on a laptop computer on the wheelchair. The software includes digital image processing algorithms
for feature detection, such as colour segmentation and edge detection, followed by the application of a
neural network that uses these features to detect the desired facial expressions. A simple simulator, built on
top of the known (Ciber-Mouse) was used to validate the approach by simulating the control of the
intelligent wheelchair in a hospital environment. The results obtained from the platform provide strong
evidence that it is possible to comfortably drive an intelligent wheelchair using facial expressions.
1 INTRODUCTION
1.1 Motivation
Several physical disabilities or diseases result in
severe impairments to mobility. Spinal chord
damage, cerebral palsy and several other conditions
can result in the loss of movement of some or all
four limbs. Usually people in these situations are
either completely dependant on others, or have
suitable technological help for moving from place to
place. The most common aid for this kind of
disability is the electric wheelchair, which is quite
good in what concerns motion, but frequently
inadequate in the user interface. The standard
command method available is the joystick that can
only be used by people with relatively good hand
dexterity, and impossible to be used by people who
have limited control of the body and only can move
some muscles of the face, and those movements will
be the only possible interaction available with an
intelligent wheelchair. Facial expressions may be
interpreted basically as a communication language,
used voluntarily but also, quite often, involuntarily,
by people, to show their emotions. It is considered
that they are inborn and cultural independent. This
can be observed in blind people since birth, as they
show the same relationship between facial
expressions and emotions, as normal people.
Although there is a strong relationship between
emotion and facial expression, there is a wide range
of face movements not connected with emotions,
such as eye blinking or raising only one eyebrow.
Ekman and Friesen (Ekman, 1978) developed the
Facial Action Coding System (FACS), which
describes thoroughly all the visually perceptible face
movements. This system defines all individual face
movements and facial expressions as their possible
combinations and was used to select some basic
expressions for the command language.
1.2 Objectives and Restrictions
The main objective of this work was to create an
interface that allows a person to drive a wheelchair,
using only facial expression in an easy, practical and
robust fashion. The hardware used to achieve these
goals, a digital camera and a PC, and the software
164
Miguel Faria P., A. M. Braga R., Valgôde E. and Paulo Reis L. (2007).
PLATFORM TO DRIVE AN INTELLIGENT WHEELCHAIR USING FACIAL EXPRESSIONS.
In Proceedings of the Ninth International Conference on Enterprise Information Systems - HCI, pages 164-169
DOI: 10.5220/0002394101640169
Copyright
c
SciTePress

developed in C++, was the main tools used to put
this idea into practice. The prototype developed had
to meet certain restrictions in order to achieve good
results:
Time: the software development process bared
in mind that it should be as fast as possible (it is
mandatory that the time interval between the
command and the action is as small as possible).
Lighting conditions: image processing, with
varying illumination, demands more complex
algorithms in order to achieve good results (one
restriction was that the system should only
operate indoors in good light conditions).
Regular background: the face detection is
done through colour detection and therefore the
background must be of a different colour.
Face Type: in order to use colours as much as
possible in feature detection, the face must have
dark hair, dark eyes and somewhat lighter skin
colour.
This paper is organized as follows: Section 2
presents related work. Section 3 shows the
developed work, distributed by 6 items: system
architecture; data acquisition; pre-processing;
identification; interface; simulator.
2 RELATED WORK
Most of the work done in this area (facial
processing) concerns facial recognition or facial
expression recognition for facial modelling. These
two main fields differ mainly in the fact that one
aims to identify a face regardless of the expression,
while facial expression recognition’s target is to
identify facial expressions regardless of identity.
Human-Computer interaction and psychological
tools are the areas where most of the facial
expression recognition work was performed.
FACS was used as base of work in many projects
(Cohen, 2003a). The first step is, in most cases, to
separate background from areas of interest or to
detect the face in the image. Two approaches to this
problem are common. One is to recognize the face
as a whole, using models or templates (Aas, 1996),
(Bartlett, 2003), (Lyons, 1998) and the other is to
detect relevant details (eyes, mouth, skin) and from
that information obtaining the whole face or simply
gathering information about those details. On other
situations, some authors have chosen to build face
models (Alekic, 2005). Once gathered the image
information, there is a wide variety of methods that
can be used. One of the most frequent is to build a
database or eigenspace where images or
characteristic data, typical of each expression to
detect, can be stored followed by the computing of
the expression to be identified, using comparison
(Aas, 1996), (Frank, 2003). Other method is to
process the information in a network (Neural,
Bayesian, etc) whose outputs are used to determine
the expression (Cohen, 2003b), (Franco, 2001).
Another approach uses local or global classifiers (K
nearest neighbour, kernel, Gabor), (Bartlett, 2003).
Finally, there are also authors that base their work in
Markov Models (Hidden Markov Models, Pseudo
3D Hidden Markov Models) (Alekic, 2005).
Some projects supported on interaction interfaces
based on movements of the head (Matsumoto,
1999), (Wei, 2004) are being developed. But, those
systems don’t have the necessary robustness to be
used in the real world, and need several
improvements and adaptations to situations like:
rapid colour change of the face; some involuntary
movements of the head; different characteristics of
the users (use of glasses, moustache). It urges the
development of robust methodologies of facial
expressions detection and his integration with
systems to configure and control intelligent
wheelchairs.
3 DEVELOPED WORK
3.1 System Architecture
The architecture that was chosen for implementing
the interface is resumed in the following logical
blocks:
Data acquisition: the process of capturing the
image with a digital camera and pre-processing
at the camera’s embedded software level.
Pre-Processing: after acquiring the digital
picture it is necessary to extract useful
information from the picture.
Identification: as soon as the feature
information is gathered, an intelligent algorithm
does the facial expression deduction.
Interface: the command language is
implemented on this level, based on facial
expressions like “opened mouth” or “raised left
eyebrow”.
3.2 Data Acquisition
The system is ready to operate with any webcam
connected to an USB port. The camera used in the
experimental setup was the Logitech Sphere
webcam, using a resolution of 320 x 240 pixels and
PLATFORM TO DRIVE AN INTELLIGENT WHEELCHAIR USING FACIAL EXPRESSIONS
165
24 bits of colour. Logitech Sphere has pan/tilt
motion capability and zoom. The driver provides
automatic histogram and white-balance correction.
3.3 Pre-processing
There are basically two types of information in an
image, which are relevant for describing the facial
expression: low spatial frequency components and
high frequency components. Low spatial frequency
information is used to determine where important
sets are located, mainly the face, while the high
frequency components provide information about
contours and shapes. The face detections and
segmentation are achieved through colour
classification and the contours are extracted using
the Canny Algorithm (Haykin, 1999).
3.3.1 Noise Filter
The main types of noise that affect the image are:
thermal noise, sensibility variations in each pixel
and random noise. Usually these kinds of noise have
a relatively high spatial frequency, so in order to
attenuate it, a Gaussian filter was implemented in the
space domain.
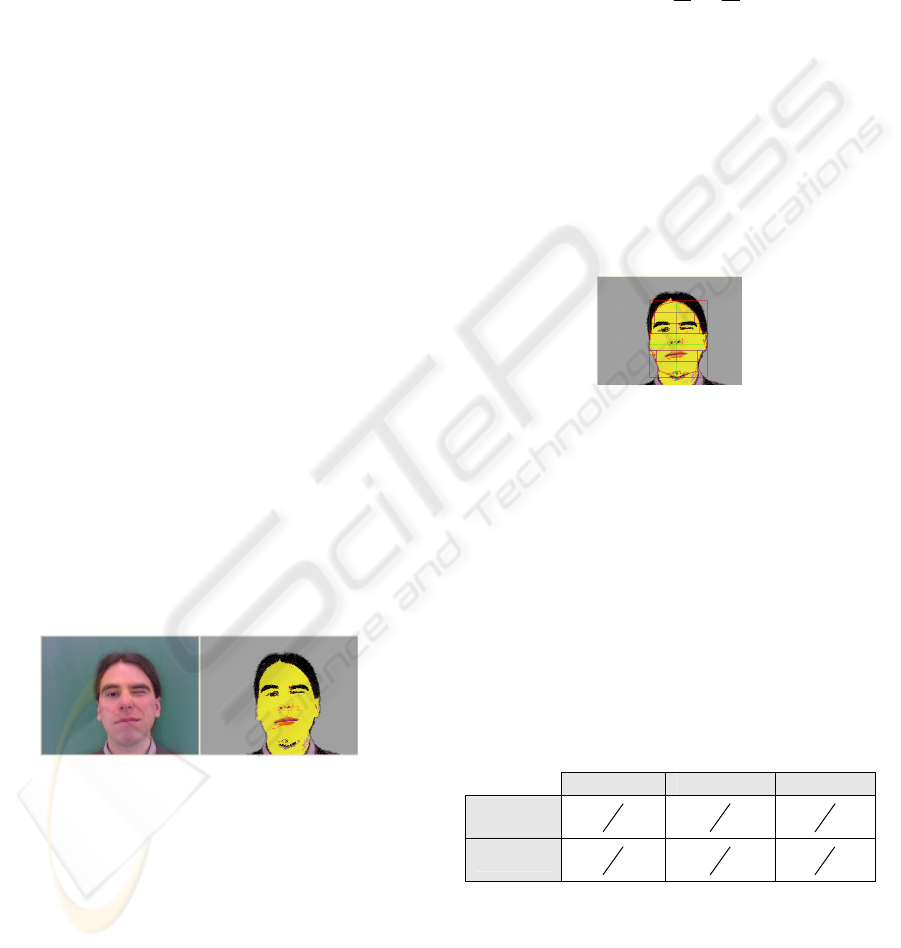
3.3.2 Face Tracking and Segmentation
In order to identify interest zones in an image it was
decided proceed with colour segmentation
(Gonzalez, 2002). This method allows, for instance,
identifying all face pixels as being of the same
category. In this way, it is possible to extract from
the image all the relevant zones in a fast and
efficient way as we can see on Fig. 1 representation.
Figure 1: Segmentation results.
To improve the efficiency of this technique, a
“Lookup Table” that associates each group of
colours (usually 8 bits leap for memory and time
consuming efficiency), to a given category with a
given trust level, was created.
Once the table is built, segmenting an image is done
by analysing it and, for each pixel, matching the
category with the colour and then replacing the
colour value for the category code. To enhance the
system’s performance in a brilliance varying
environment, an intensity correction method was
developed.
Once the image is segmented, the next step is to
track the face. This is done in a progressive way.
First the center of the face is computed simply as
being the average of the points of the category
associated to the face.
⎟
⎟
⎟
⎠
⎞
⎜
⎜
⎜
⎝
⎛
=
∑∑
==
n
y
i
n
i
i
n
y
n
x
yxCenter
11
,),(
(1)
At this point we have the center of the face, so what
is done next is expanding in four directions (axis
oriented) to detect face limits (upper, lower, right
and left). Now, relevant zones of the face have to be
defined, aiming to extract information to input the
neural network. This is achieved dividing the height
of the face in order to obtain the zones where
eyebrows, eyes and mouth are expected to be found.
The visual result of this approach is shown on figure
below.
Figure 2: Relevant zones of the face.
On the next step the face, eyebrows, mouth and no
category points are counted in each zone. The
relationship between those values and the total
points of each zone is a characteristic of a given
facial expression. Once tracked the face and
established the 6 interest zones, a simple count of
the points of all categories (eyebrow, mouth, face
and others) is performed in each zone. These zones
are obtained by dividing the height of the face in
equal parts in a successive way, and next, chose the
upper and lower limits of the zones (Table 1).
Table 1: Face zones (values are fractions of the face
height).
Eyebrows Eyes Mouth
Upper
8
7
4
3
8
3
Lower
4
3
8
5
4
1
If no points of the expected category are found in a
given zone, eyebrow (black points for example)
points are not found in the eyebrow zone, for
instance, this is also a characteristic input of an
expression for the neural network. This happens if
the head is turned up, down, left or right.
ICEIS 2007 - International Conference on Enterprise Information Systems
166

3.3.3 Edge Detection
Edge detection is made in order to capture the
shapes inside the face (Fig. 3). This process consists
in extracting the high frequency components and for
this purpose the Canny Operator is used. The Canny
Operator use criteria that increase precision and
accuracy to speed processing. Using a Gaussian
mask of 5 by 5 pixels of dimension, a Sobel operator
of 3 by 3 and 8 connectedness for thresholding,
gives about 135 operations per pixel. In this
implementation it took about 200ms per image of
320 by 240 pixels to produce the final result. Since
the real time constraint here is not very strict, a
better relationship between the extracted information
and the facial expression was preferred to a faster
but no so accurate method.
Figure 3: Canny results.
In order to better describe the image, several patterns
for each expression are taken during the
configuration phase. During the execution cycle the
contour image is compared with each saved pattern.
The comparison consists in counting the number of
coincident points with each saved pattern.
3.4 Identification
Here the measures taken in the pre-processing are
translated into facial expressions. The data deployed
to this block is relatively large, 23 inputs, and there
is no guarantee of a linear relationship with the
outputs. Establishing a relationship manually, even
using fuzzy logic, would be very inefficient. A
multilayer perception (MLP) with a continuous
activation function can be used to compute the
probability of an expression, for a given input
pattern, after learning automatically with a training
set. An Artificial Neural Network (Franco, 2001)
(Haykin, 1999) takes some advantage over other
methods with automatic learning facing this
problem. The MLP type of network was chosen
because it is possible to achieve good results. At this
stage only a good solution was sought and
optimizations to the identification process are left for
future development. The network uses 22 inputs, 11
outputs (expressions) 1 hidden layer, 10 hidden
neurons all with sigmoid activation function, trained
with simple backpropagation and 110 training
patterns are used. Concerning the number of hidden
layers, one is enough for universal approximation,
and it is also less prone for local minima to occur
than using 2 hidden layers. There is no exact method
for calculating the necessary number of hidden
neurons, but the following heuristic helps:
2
1
+
−
≥
n
p
h
,
in which p is the number of training examples and n
the number of input neurons. The Vapnic
Chervonenkis dimension was also taken in
consideration. The VP dimension is less than 4533.5
given by
(
)
eNW
2
log||2 – with W being the number
of weights and N the number of neurons – and
greater than 271 given by
12/)1(
3221
+
−+ nnnn , in
which
i
n is the number of neurons in the respective
layer (Kasabov, 1998). The number of training
examples used is 110 which are within range.
Training was done so that the final training error
would be less than 6E-5 (experimentally it was
found to be a good value), and it takes about 5
minutes (approx. 100000 iterations) to achieve that
result. The network must be trained for each user.
3.5 Interface
After identifying the facial expression, the
corresponding command is checked in the command
language definitions and sent to the (simulated)
control system. Only in the instruction mode the
facial expressions with commands associated are
validated. Once out of the instruction mode, all
commands other than the “instruction mode”
command are ignored. In this way, the necessary
level of concentration, while driving, can be
reduced. Finally, it is possible to create a new
training set for the Neural Network.
3.6 Simulator
The Ciber-Mouse simulator was used in order to
evaluate the final results as shown below on Fig. 4.
Figure 4: Ciber-Mouse Interface.
PLATFORM TO DRIVE AN INTELLIGENT WHEELCHAIR USING FACIAL EXPRESSIONS
167
Ciber-Mouse is a competition among virtual robots,
which takes place in a simulation environment
running in a network of computers. The simulation
system creates a virtual arena with a starting grid, a
target area, signalled by a beacon, and populated of
obstacles. It also creates the virtual bodies of the
robots. Participants must provide the software agents
which control the movement of the virtual robots, in
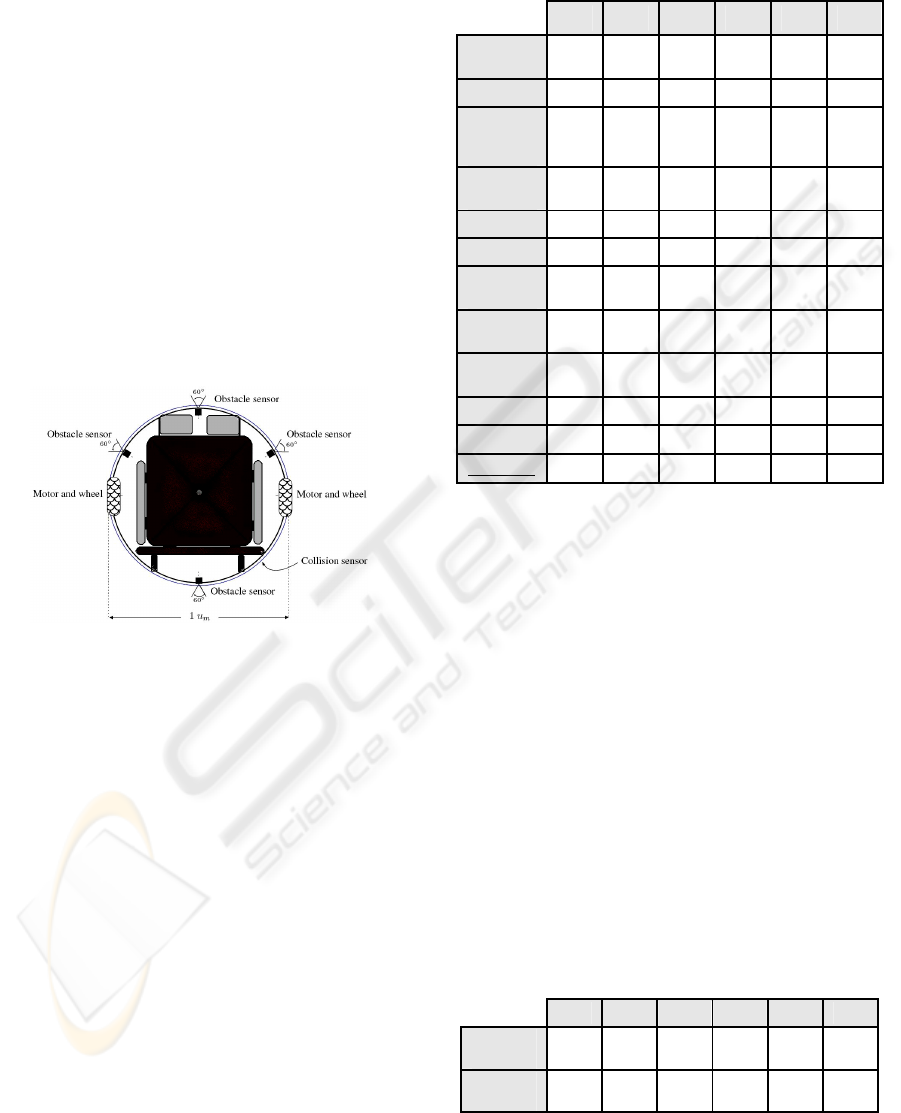
order to accomplish some goals. All virtual robots
have the same kind of body (Fig. 5). It is composed
of a cylindrical shape, equipped with sensors,
actuators, and command buttons. The simulator
estimates sensor measures which are sent to the
agents. Reversely, receives and apply actuating
orders coming from agents. The Ciber-Mouse
simulator was configured for wheelchair
representation moving in a hospital environment. It
was taken into consideration the dynamic behaviour
of the wheelchair detecting collisions with objects as
well.
Figure 5: Body of virtual wheelchair.
At the end of the whole process, all the wheelchair
commands were send for the control unit, which
receives commands and processes it with sensor
information. After control unit calculate the signal of
control, he sends directly on the simulator who
interprets them and makes the correct
correspondence to the wheelchair model
movements. The system architecture allows
understanding the information cycle information.
4 RESULTS
The image processing and identification takes about
200 ms (using an Intel Centrino 1.8 GHz processor).
The facial expression identification results of one
good test were putted on confusion matrix which
analysis is presented below. A satisfactory average
accuracy was obtained in the results presented here.
Table 2: Confusion Matrix analysis: acc – accuracy, tpr –
true positive rate, fpr – false positive rate, tnr – true
negative rate, fnr – false negative rate, p – precision.
ACC TPR FPR TNR FNR P
Opened
mouth
94,8 100,0 1,0 99,0 0,0 90,0
Frowned 54,7 100,0 6,5 93,4 0,0 30,0
Frowned &
wrinkled
nose
89,4 100,0 1,9 98,0 0,0 80,0
Leaned
right
100,0 100,0 0,0 100,0 0,0 100,0
Leaned left 100,0 100,0 0,0 100,0 0,0 100,0
Normal 95,3 90,9 0,0 100,0 9,1 100,0
raised right
eyebrow
54,8 100,0 6,5 93,6 0,0 30,0
raised left
eyebrow
94,9 100,0 1,0 99,0 0,0 90,0
Raised
eyebrows
95,5 90,9 0,0 100,0 9,1 100,0
turned right 100,0 100,0 0,0 100,0 0,0 100,0
turned left 89,4 100,0 2,0 98,0 0,0 80,0
AVERAGE 88,1 98,3 1,7 98,3 1,7 81,9
It is clear that the frowned expression had a weak
accuracy and precision. This is not unexpected since
two very similar expressions were chosen on
purpose to determine how well the system can
discriminate between slightly different expressions.
“Frowned” and “Frowned and wrinkled nose” are
quite similar and judging from the results the system
can tell the difference between them but not in a
very reliable way. As for the “Raised Right
Eyebrow”, it’s below average results are probably
due to some casual error during the extraction of
training patterns, which can happen naturally. In
order to have an estimate of the performance of each
type of features, colour segmentation and edge
comparison, the identification process using the
same network architecture (apart from the number of
input neurons) was done using them separately. The
average results are shown in table 3.
Table 3: Identification results using only colour
segmentation or contours.
ACC TPR FPR TNR FNR P
Col. Seg.
Average
82,6 90,9 2,2 97,8 9,1 77,3
Contour
Avg
79,6 85,7 2,2 97,8 5,2 76,4
ICEIS 2007 - International Conference on Enterprise Information Systems
168

Table 4: Training and testing results.
segmentation
only
contours
only
Both
training
error
4,65E-03 5,40E-03 5,80E-05
test error 1,50E-01 1,65E-01 8,57E-02
Using only colour segmentation, the identification
results are quite good, and it is less time consuming
(less than 150ms). The contour measures alone are
not as good as the colour segmentation ones (table 4)
though they are more robust to lighting variations.
The combination of both types is better than only
one set.
5 CONCLUSIONS
The main conclusion of this work is that it will be
possible to drive a wheelchair, by using facial
expressions, in a very comfortable way, using the
system here presented. This conclusion is based on
the very good results achieved by our facial
expression detection process, together with the
general empirical feel attained by the project
members and volunteers when driving our simulated
wheelchair. The main limitations to the good
performance of our system are presently located in
the pre-processing stage. The colour segmentation is
much too sensitive to large light variations and slight
colour shifts, and the shape extraction should have
better precision without increasing the processing
time. These problems affect the robustness of the
system and its response time. All the other parts of
the system have not posed any practical limitation to
the system’s performance. In order to overcome the
problems mentioned, future developments will be
first focused on the pre-processing aiming to allow
the system to better perform in outdoor
environments or rough lightning conditions.
Other future developments will include
improvements on the wheelchair simulator and the
next steps will be the introduction of commands for
the wheelchair using the keyboard, and compare the
behaviours with the ones that are obtained by the use
of the platform using facial expressions. Then, it will
be necessary to obtain objective indicators of the
global performance, and this can be achieved by
including on the simulator some simple skill tests
such as obstacle avoiding. In the context of this
project the system will be improved and
implemented on a real wheelchair driven by
quadriplegia and cerebral palsy handicapped people,
using our intelligent wheelchair platform.
REFERENCES
Aas, Kjersti 1996. Audio-Visual Person Recognition: A
Survey, Report no. 911, Norwegian Computing Center
Alekic, Peter et al. 2006. Automatic Facial expression
recognition using facial animation parameters and
multi-stream HMMs. IEEE Signal Processing Society
Bartlett, M. et al 2003.
Real Time Face detection and
facial expression recognition: Development and
Applications to Human Computer Interaction. CVPR
Workshop on Computer Vision and Pattern
Recognition for Human-Computer Interaction
Cohen, Ira et al 2003a.
Facial expression recognition from
video sequences
. Computer Vision and Image
Understanding, Volume 91, Issues 1-2, Pages 160-
187, Special Issue on Face Recognition
Cohen, Ira et al. 2003b.
Semi-Supervised Learning for
Facial Expression Recognition
, 5th ACM SIGMM
International Workshop on Multimedia Information
Retrieval
Ekman & Friesen 1978.
Facial action coding system: A
technique for the measurement of facial movement
.
Consulting Psychologists Press
Franco, Leonardo 2001. A Neural Network Face
Expression Recognition System using Unsupervised
Local Processing. Proceedings of the Second
International Symposium on Image and Signal
Processing and Analysis (ISPA 01), Croatia, pp. 628-
632, June 19-21
Frank, Carmen & Nöth 2003, E., Automatic Pixel
Selection for Optimizing Facial Expression
Recognition using Eigenfaces, Pattern Recognition
25th DAGM Symposium
Gonzalez, Rafael C. & Woods, Richard E. 2002.
Digital
Image Processing
. Prentice-Hall
Haykin, Simon 1999.
Neural Networks - A Comprehensive
Foundation
. Prentice-Hall
Matsumoto, Y. and Zelinsky, A., 1999.
Real-time Face
Tracking System for Human-Robot Interaction
.
Proceedings of the 1999 IEEE International
Conference on Systems, Man and Cybernetics
(SMC99), Vol. 2, pp. 830-835.
Wei, Y., 2004. Vision-based Human-robot Interaction and
Navigation of Intelligent Service Robots
. PhD
Dissertation, Institute of Automation, Chinese
Academic of Sciences, Beijing, China.
PLATFORM TO DRIVE AN INTELLIGENT WHEELCHAIR USING FACIAL EXPRESSIONS
169
