
LEARNING TO RANK FOR COLLABORATIVE FILTERING
Jean-Francois Pessiot, Tuong-Vinh Truong, Nicolas Usunier, Massih-Reza Amini and Patrick Gallinari
Department of Computer Science, University of Paris VI
104 Avenue du President Kennedy, 75016 Paris, France
Keywords:
Collaborative Filtering, Recommender Systems, Machine Learning, Ranking.
Abstract:
Up to now, most contributions to collaborative filtering rely on rating prediction to generate the recommenda-
tions. We, instead, try to correctly rank the items according to the users’ tastes. First, we define a ranking error
function which takes available pairwise preferences between items into account. Then we design an effec-
tive algorithm that optimizes this error. F inally we illustrate the proposal on a standard collaborative filtering
dataset. We adapted the evaluation protocol proposed by (Marlin, 2004) for rating prediction based systems
to our case, where pairwise preferences are predicted instead. The preliminary results are between those of
two reference rating prediction based methods. We suggest different directions to further explore our ranking
based approach for collaborative filtering.
1 INTRODUCTION
With the emergence of e-commerce, a growing num-
ber of commercial websites are using recommender
systems to help their customers find products to pur-
chase. The goal of such systems is to generate person-
alized recommendations for each user, i.e. to filter out
a potentially huge set of items, and to extract a sub-
set of N items that best matches his tastes or needs.
The most successful approach to date is called collab-
orative filtering; the main underlying idea is to iden-
tify users with similar tastes and use them to generate
the recommendations. Collaborative filtering is par-
ticularly suited to recommend cultural products like
movies, books and music, and is extensively used in
many online commercial recommender systems, like
Amazon.com or CDNow.com.
A simple way to model a user’s preferences is to
assign to each item a numerical score which measures
how much he likes this item. All items are then or-
dered according to those scores, from the user’s top
favorites to the ones he’s less interested in. In the stan-
dard collaborative filtering framework, those scores
are ordinal ratings from 1 to 5. Each user has only
rated a few items, leaving the majority of them un-
rated. Most collaborative filtering methods are based
on a rating prediction approach: taking the available
ratings as input, their goal is to predict the missing
ratings. The recommendation task simply consists in
recommending each user the unrated items with the
highest predictions.
Due to its simplicity and the fact that it easily ac-
commodates with objective performance evaluation,
the rating prediction approach is the most studied in
the collaborative filtering literature. Previous works
include classification (Breese et al., 1998), regres-
sion (Herlocker et al., 1999), clustering (Chee et al.,
2001), dimensionality reduction ((Canny, 2002), (Sre-
bro and Jaakkola, 2003)) and probabilistic methods
((Hofmann, 2004), (Marlin, 2003)). As they all re-
duce the recommendation task to a rating prediction
problem, those methods share a common objective:
predicting the missing ratings as accurately as possi-
ble. However, from the recommendation perspective,
the order over the items is more important than their
ratings. Our work is therefore a ranking prediction
approach: rather than trying to predict the missing
ratings, we predict scores that respect pairwise prefer-
ences between items, i.e. preferences expressing that
one item is preferred to another. Using those pairwise
preferences, our goal is to improve the quality of the
recommendation process.
145
Pessiot J., Truong T., Usunier N., Amini M. and Gallinari P. (2007).
LEARNING TO RANK FOR COLLABORATIVE FILTERING.
In Proceedings of the Ninth International Conference on Enterprise Information Systems - AIDSS, pages 145-151
DOI: 10.5220/0002396301450151
Copyright
c
SciTePress
The rest of the paper is organized as follows. Sec-
tion 2 presents our approach, then details the algo-
rithm and the implementation. Experimental protocol
and results are given in section 3. We conclude and
give some suggestions to improve our model in sec-
tion 4.
2 CF AS A RANKING TASK
2.1 Motivation
Most previous works in the collaborative filtering lit-
erature have a common approach where they decom-
pose the recommendation task into two steps: rat-
ing prediction and recommendation. Of course, once
the ratings are predicted, the latter is trivially accom-
plished by sorting the items according to their pre-
dictions and recommending to each user the items
with the highest predictions. As they reduce the rec-
ommendation task to a rating prediction problem, all
these rating prediction approaches have the same ob-
jective: predicting the missing ratings as accurately
as possible. Such objective seems natural for the rec-
ommendation task, and it has been the subject of a
great amount of research in the collaborative filter-
ing domain (Marlin, 2004). The rating based formu-
lation is simple and easily accommodates with later
performance evaluation. However, it is important to
note that rating prediction is only an intermediate step
toward recommendation, and that other alternatives
may be considered.
In particular, considering the typical use of rec-
ommendation where each user is shown the top-N
items without their predicted scores (Deshpande and
Karypis, 2004), we think that correctly sorting the
items is more important than correctly predicting their
ratings. Although these two objectives look similar,
they are not equivalent from the recommendation per-
spective. Any method which correctly predicts all the
ratings will also correctly sort all the items. However,
two methods equally good at predicting the ratings
may perform differently at predicting the rankings.
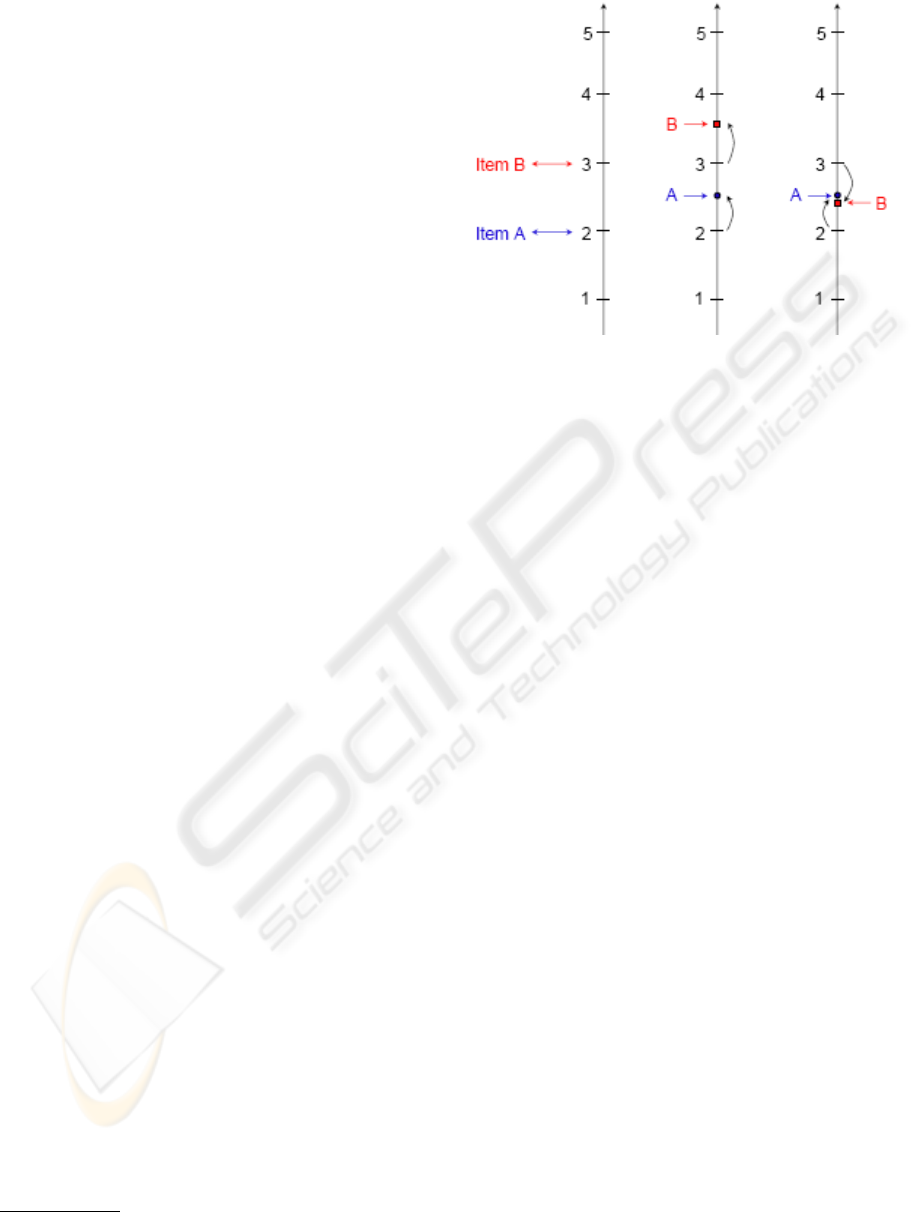
Figure 1 shows a simple example: let [2, 3] be the true
ratings of items A and B respectively, r
1
= [2.5, 3.6]
and r
2
= [2.5, 2.4] be two prediction vectors obtained
from two different methods. r
1
and r
2
are equivalent
with respect to the squared error
1
(both errors equal
0.5
2
+ 0.6
2
), while only r
1
predicts the correct rank-
ings, as it scores B higher than A. A more detailed
study of the performance evaluation problem in col-
1
That is the squared difference between a true rating and
the prediction
Figure 1: Left scale: true ratings for items A and B. Middle
and right scales: prediction vectors r
1
and r
2
. The squared
error equals 0.61 for both r
1
and r
2
. The ranking error
equals 0 for r1 and 1 for r2.
laborative filtering can be found in (Herlocker et al.,
2004).
This work proposes an alternative to the tradi-
tional rating prediction approach: our goal is to cor-
rectly rank the items rather than to correctly predict
their ratings. To achieve this goal, we first define
a ranking error that penalizes wrong ranking predic-
tions between two items. Then we propose our model,
and design an effective algorithm to minimize the
ranking error.
2.2 Formal Definition and Notation
2.2.1 Definition
We assume that there are a set of n users and p items,
and that each user has rated at least one item. A
CF training instance is a triplet of the form (x, a, r)
where x, a and r are respectively a user index in X =
{1, . . . , n}, an item index in Y = {1, . . . , p} and a rat-
ing value in V = {1, . . . , v}. For each user’s available
ratings, we construct the set of pairwise preferences
y
x
= {(a, b)|a ∈ Y , b ∈ Y , r
x
(a) > r
x
(b)}, where r
x
(a)
denotes the rating of item a provided by user x. Every
pair (a, b) ∈ y
x
is called a pairwise preference which
means that user x prefers item a to item b.
2.2.2 Utility Functions
Utility functions are the most natural way to repre-
sent preferences. An utility function f : X × Y → R
depicts the user preferences over a given item as a
real-valued variable. Thus, if an user x ∈ X prefers
ICEIS 2007 - International Conference on Enterprise Information Systems
146

an item a over an item b, this preference can sim-
ply be represented by the inequality f (x, a) > f (x, b).
To make recommendations for a given user x, it then
comes natural to present items in a decreasing order
of ranks with respect to the output of f (x, .).
We consider that each user and each item is de-
scribed by an (unknown) k-length vector, where k is a
fixed integer. We also consider that the form of a util-
ity function f is a dot product between the user vector
and the item vector ∀(x, a) ∈ X ×Y , f (x, a) =
h
i
a
, u
x
i
,
where i
a
∈ R
k
and u
x
∈ R
k
are respectively the vector
descriptions of item a and user x. We define U as the
n-by-k matrix where the x-th row contains the user
vector u
x
, and I as the k-by-p matrix where the a-th
column contains the item vector i
a
. The product UI
denominates a n-by-p utility matrix associated to the
utility function f , where (U I)
xa
= f (x, a).
2.2.3 Cost Function
With respect to the previous notations, a ranking pre-
diction is correct if f (x, a) > f (x, b) when (a, b) ∈ y
x
.
We can now define the cost function D as the number
of pairwise preferences (a,b) ∈ y
x
wrongly predicted
by the utility function over all users in the training set:
D(U, I) =
∑
x
∑
(a,b)∈y
x
[[(UI)
xa
≤ (UI)
xb
]] (1)
where [[pr]] is equal to 1 if the predicate pr holds and
0 otherwise. The objective of learning is to find the
best representations for users and items such that the
number of pairwise preferences wrongly predicted, D,
is the lowest possible. This is an optimisation prob-
lem which consists to find I and U minimizing D. As
D is not differentiable we optimise its exponential up-
perbound using the inequality [[x ≤ 0]] ≤ e
−x
:
D(U, I) ≤
∑
x
∑
(a,b)∈y
x
e
(U I)
xb
−(U I)
xa
|
{z }
E(U,I)
(2)
The exponential upper-bound is convex separately
in U and I, so standard optimisation algorithms can
be applied for its minimisation. In order to regularize
the factorization, we also add two penalty terms to the
exponential objective function E
R (U, I) =
∑
x
∑
(a,b)∈y
x
e
(U I)
xb
−(U I)
xa
+ µ
U
kUk
2
+ µ
I
kIk
2
(3)
where kRk
2
denotes the Frobenius norm of a matrix
R, and is computed as the sum of its squared elements
: kRk
2
=
∑
i j
R
2
i j
. It is a standard penalty function
used to regularize matrix factorization problems (Sre-
bro et al., 2004). The regularization is controled by
the positive coefficients µ
U
, µ
I
and must be carefully
chosen to avoid overfitting the model on the training
data. The optimization problem reduces to :
(U
∗
, I
∗
) = argmin
U,I
R (U, I)
where argmin returns the matrices U
∗
and I
∗
that min-
imize the cost function R .
2.3 Model
2.3.1 Optimization
The objective function R is convex over each variable
U and I separately, it is however not convex over both
variables simultaneously. To minimize R , we pro-
pose a two steps optimization procedure, which con-
sists in alternatively fixing one variable U or I and
minimizing R with respect to the other. Each min-
imization step is performed using gradient descent,
and those steps are repeated until convergence. Al-
gorithm 1 depicts this procedure.
Algorithm 1: A learning Algorithm for CF.
Input :
• The set of pairwise preferences
∀x ∈ X , y
x
= {(a, b)|a ∈ Y , b ∈ Y , r
x
(a) > r
x
(b)}
Initialize:
• Initialize U
(1)
and I
(1)
at random
• t ← 1
repeat
• U
(t+1)
← argmin
U
(t )
R (U
(t)
, I
(t)
)
• I
(t+1)
← argmin
I
(t )
R (U
(t+1)
, I
(t)
)
• t ← t + 1
until convergence of R (U, I) ;
Output : U and I
As the objective function R is not convex in both U
and I, the proposed algorithm may lead to a local min-
ima of R . The derivatives of R computed at each step
of the algorithm for the gradient descent are:
∂R
∂I
jd
=
∑
x
h
∑
a
U
xd
e
(I
T
u
x
)
j
−(I
T
u
x
)
a
δ
x
ja
−
∑
b
U
xd
e
(I
T
u
x
)
b
−(I
T
u
x
)
j
δ
x
b j
i
+ 2µ
I
I
jd
∂R
∂U
x
=
∑
(a,b)∈y
x
(i
b
− i
a
) e
(I
T
u
x
)
b
−(I
T
u
x
)
a
+ 2µ
U
u
x
LEARNING TO RANK FOR COLLABORATIVE FILTERING
147

where u
x
is the x-th row of U, i
a
is the a-th column
of I, (I
T
u
x
)
j
is the j
th
component of the matrix prod-
uct between I and u
x
, and δ
x
ja
= 1 if ( j, a) ∈ y
x
and 0
otherwise.
2.3.2 Implementation and Complexity Analysis
The most important challenge of CF recommendation
systems is to be able to manage a huge volume of data
in real time. For example, the MovieLens dataset
2
,
that we considered in our experiments, is constituted
of 1 million ratings for 6,040 users and 3,706 movies.
As a result CF approaches involve a major constraint
of requiring very high computing resources. The real-
time computing and recommending constraints force
recommendation engines to be scalable in terms of
number of users and items. In order to fulfill these
constraints, our system learn the parameters U
∗
and
I
∗
offline and makes recommendations online. In the
following, we present the computational complexities
of these operations and show that both complexities
are linear in number of items, users or rating’s values.
Offline Learning Complexity. Learning the pa-
rameters of the recommendation system goes over the
computation of the gradient of R (equation 3) with
respect to U and I (algorithm 1). This computation re-
quires to consider the p
2
pairwise preferences over all
items and is often unrealistic in real-life CF applica-
tions. However, similarly to (Amini et al., 2005), we
can show that the objective function R can be rewrit-
ten as follows :
R (U, I) =
∑
x
∑
r∈V
∑
a|r
x
(a)<r
e
(U I)
xa
×
∑
b|r
x
(b)=r
e
−(U I)
xb
!
+ µ
U
kUk
2
+ µ
I
kIk
2
for which the computation is linear with respect to the
number of items p. More precisely, the computational
complexity of this function is O(np(v + k)) (where
n is the number of users, v the number of possible
rating values and k the dimension of the space rep-
resentation). Using a similar decomposition for both
gradients, the complexity of each iteration of our al-
gorithm is O(np(v + k)). The total complexity is then
O(T np(v + k)), where T is the maximum number of
iterations of our algorithm.
Recommendation Complexity. To make recom-
mendation for a user, the system computes a corre-
sponding score by multiplying the user matrix and
the item matrix. The complexity of this operation
2
http://www.grouplens.org/
is O(pk), the top h items are then sorted and those
with the highest scores are presented as recommended
items to the user. The complexity of a recommenda-
tion is thus equal to O(p(k + h log h)).
3 EXPERIMENTS
3.1 Experimental Protocol and Error
Measure
In order to evaluate our approach, we are going to
measure the ability of our method to generalize to
unseen pairwise preferences. In these experiments,
the available ratings for each user are split into an
observed set, and a held out set; each set is then
used to generate a pairwise preferences set. The
first one is used for training, and the second one for
testing the performance of the method. Note that this
protocol only measures the ability of a method to
generalize to other pairwise preferences provided by
the same users who were used for training the method.
Testing is done by first partitioning each user’s
ratings into a set of observed items, and a set of held
out items; each set is then used to generate a pairwise
preferences set: a training one and a test one. One
way to choose the set of held out items is to randomly
pick K items among the user’s ratings. Since CF
datasets are already sparse, for each user we only
pick 2 items for testing and leave the rest for training;
we call this protocol all-but-2.
In order to compare the ranking prediction accuracies
of the different methods, we define the mean rank-
ing error (MRE), which counts the mean number of
prediction errors over the test pairwise preferences.
Assuming n users and 2 test items per user as in the
all-but-2 protocol:
MRE =
1
n
∑
x
[[(I
T
u
x
)
a
x
≤ (I
T
u
x
)
b
x
]]
where (a
x
, b
x
) is the test pairwise preference of user i.
3.2 Dimensionality Reduction for
Rating Prediction
We compare our approach with two dimensional-
ity reduction methods used for rating prediction:
weighted Singular Value Decomposition and General-
ized Non-Negative Matrix Factorization. In this sub-
section, we briefly describe them and explain how
they are applied to the rating prediction task.
ICEIS 2007 - International Conference on Enterprise Information Systems
148

Definitions. In the following, R is a n-by-p matrix,
k is a positive integer with k < np, and W is a n-by-p
matrix of positive weights. The Frobenius norm
of R is defined as: kRk
2
=
∑
i j
R
2
i j
. In its simplest
form, the goal of matrix factorization is to find the
best k -rank approximation of R in respect to the
Frobenius norm, i.e. to find the k-rank matrix
ˆ
R
minimizing kR −
ˆ
Rk
2
. As most standard matrix
factorization methods are unable to handle missing
elements in R, recent approaches propose to optimize
the weighted Frobenius norm instead of the standard
Frobenius norm, i.e.: kW (R −
ˆ
R)k
2
, where is the
elementwise Schur product. Missing elements R
i j
are
simply handled by setting corresponding W
i j
to 0.
Singular Value Decomposition. SVD is a standard
method for dimensionality reduction; it is used to
decompose R into a product ASV
T
where A, S, V
are n-by-p, p-by-p, p-by-p matrices respectively. In
addition, A and V are orthogonal, and S is a diagonal
matrix where S
ii
is the i
th
largest eigenvalue of DD
T
;
the columns of A and V are the eigenvectors DD
T
and D
T
D respectively, and are ordered according to
the values of the corresponding eigenvalues. The
main property is that the k-rank approximation of
R obtained with SVD is optimal in respect to the
Frobenius norm. While SVD cannot be used when
some entries of the target matrix R are missing,
the weighted SVD (wSVD) approach proposed by
(Srebro and Jaakkola, 2003) can handle such missing
data by optimizing the weighted Frobenius norm.
Its simplest implementation consists of an EM-like
algorithm, where SVD is iteratively applied to an
updated low-rank approximation of R. Although very
simple to implement, this method suffers from a high
algorithmic complexity ( O(lnp
2
+ l p
3
) where l is
the number of iterations), making it difficult to use on
real CF datasets.
Non-negative Matrix Factorization. NMF is a
matrix factorization method proposed by (Lee and Se-
ung, 1999). Given a non-negative n-by-p matrix R
(i.e. all the elements of R are non-negative real num-
bers), NMF computes a k-rank decomposition of R
under non-negativity constraints. The motivation of
NMF lies in those constraints, as their authors ar-
gue that they allow the decomposition of an object
as the sum of its parts. Formally, we seek a prod-
uct of two non-negative matrices U , I of sizes n-
by-k and k -by-p respectively, optimal in respect to
the Frobenius norm. The corresponding optimiza-
tion problem is not convex, thus only local minima
are achievable; those can be found using Lee’s multi-
plicative updates. Although NMF was not designed to
work with missing data, (Dhillon and Sra, 2006) re-
cently proposed the Generalized Non-negative Matrix
Factorization (GNMF) which optimizes the weighted
Frobenius norm.
Application to CF. . Previous matrix factorization
methods are applied in a similar way to the CF task:
given n users and p items, we consider the n-by-p tar-
get matrix R and the n-by-p weights matrix W . If
the user x provided the rating r for the item a, then
R
xa
= r and W
xa
= 1; if the rating is unknown, then
W
i j
= 0. The matrix factorization of R is driven by
the optimization of the weighted Frobenius norm; for
both weighted SVD and GNMF, unknown ratings are
randomly initialized. The ratings predictions for un-
rated items are given by the k-rank matrix resulting
from the matrix factorization. The real predicted rat-
ings induce a total order over the unrated items; in the
following, we will compare our ranking predictions to
the ones obtained by weighted SVD and GNMF.
3.3 Dataset
We used a public movie rating dataset called Movie-
Lens; it contains 1,000,209 ratings collected from
6,040 users over 3,706 movies. Ratings are on a scale
from 1 to 5. The dataset is 95.5% sparse. For each
user we held out 2 test items using the all-but-2 pro-
tocol, leaving 988,129 ratings for training and 12,080
for testing. This was done 5 times, generating a total
of 10 bases for the evaluation. All the results pre-
sented below are averaged over the generated bases.
3.4 Results
We compared our approach to GNMF and wSVD
for several values of the matrix rank k . We stopped
our algorithm after 50 iterations of our two steps
procedure; GNMF was stopped after 1000 iterations.
We also simplified the regularization problem by
fixing µ
A
= µ
X
for both GNMF and our approach;
several regularization values were tried, and the
presented MRE results correspond to the best ones.
GNMF was used with µ
U
= µ
I
= 1, and our ranking
approach with µ
U
= µ
I
= 100. The main results are:
GNMF wSVD Ranking
k 9 8 8
MRE 0.2658 0.2770 0.2737
LEARNING TO RANK FOR COLLABORATIVE FILTERING
149
Discussion. The optimal values for k are almost
identical for the three approaches; this is not surpris-
ing for GNMF and wSVD, as they are very similar
methods (their only difference lies in the additional
non-negativity constraints for GNMF). But this is in-
teresting for our ranking approach, and it seems that
explaining the users pairwise preferences is as dif-
ficult as explaining their ratings, as they require the
same number of hidden factors.
Although not equivalent, the ranking error used
for evaluation is closely related to the ranking error
optimized by our approach, while GNMF and wSVD
optimize a squared error measuring how well they
predict the ratings. This is why these primary results
are a bit disappointing, as we would have logically
expected our approach to have the best ranking er-
ror. The good performance of GNMF is not surpris-
ing considering that it already performed well (at least
better than wSVD) with respect to rating prediction
(Pessiot et al., 2006). Concerning wSVD, its ranking
error could be improved by increasing the number of
iterations, but the high algorithmic complexity makes
it difficult to use on real datasets such as MovieLens,
especially when the number of items is high. In our
experiments, we had to stop it after only 20 iterations
due to its extreme slowness. Besides, this wSVD is
also limited by its lack of regularization, which is usu-
ally used to avoid the overfitting problem.
Further directions need to be explored to complete
and improve those primary results. The first direction
concerns user level normalization: when we minimize
the sum of errors (the sum of squared errors for each
rating in GNMF and wSVD, the sum of ranking errors
for each pairwise preference in our approach), users
who have rated lots of items tend to be associated with
higher errors; thus the learning phase focuses on those
users, while ignoring the others. This problem can be
avoided if we give each user the same importance by
considering normalized errors, i.e. by dividing each
user’s error by the number of his pairwise preferences.
The mean ranking error we define for evaluation is in
fact a normalized error, as we only consider one test
pairwise preference for each user. This is why we
expect that learning with normalized errors will give
better experimental results.
A second direction we want to explore is a more
careful study of stopping criteria. We stopped GNMF
and our ranking approach after fixed numbers of iter-
ations, which seemed to correspond to empirical con-
vergence. In future experiments, we will rather stop
them when the training errors stop decreasing, which
will allow us a more thorough comparison of the three
methods with respect to the training time.
Another question we need to study concerns the
regularization. It is an important feature of a learn-
ing algorithm as it is used to prevent overfitting the
training data, thus avoiding bad predictions on unseen
data. In both GNMF and our ranking approach, µ
U
and µ
I
are the regularization terms. Setting µ
U
= µ
I
=
0 means no regularization; and the higher they are, the
more matrix norms are penalized. In our experiments
we fixed µ
U
= µ
I
for simplicity. By doing this, we im-
plicitly gave gave equal importance for each variable
of our model. In future works, we will study the exact
influence of those regularization terms, and how they
should be fixed.
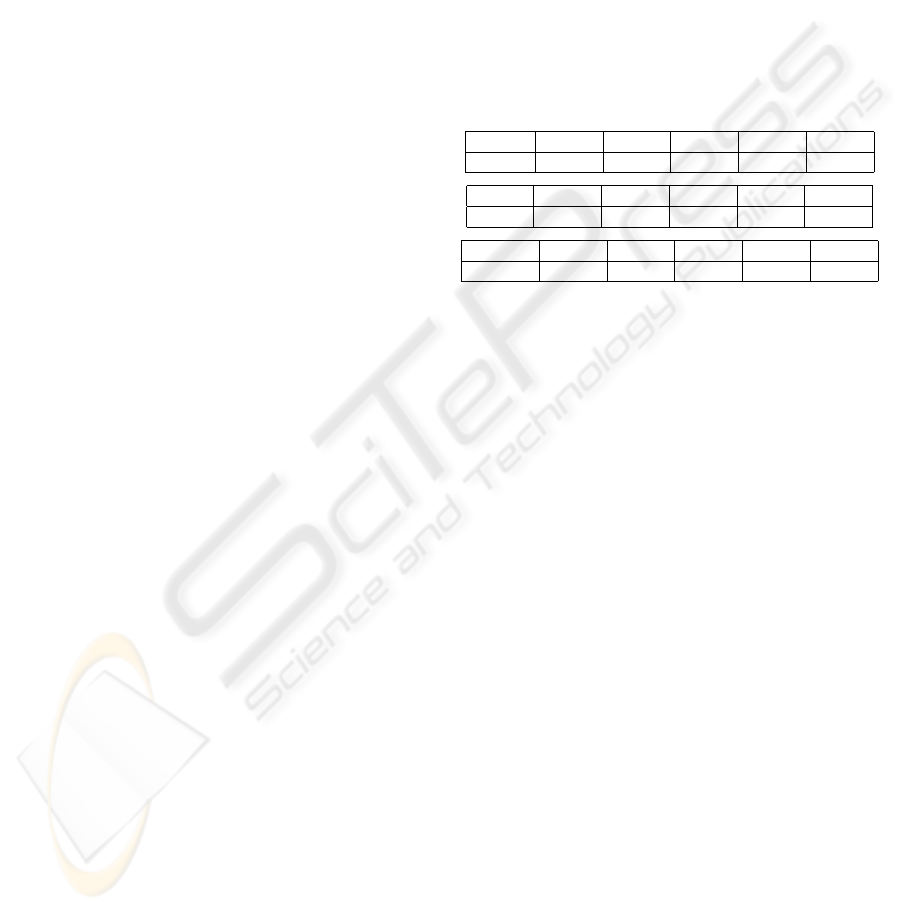
Detailed Results. MRE results for several values of
the rank k:
k 7 8 9 10 11
GNMF 0.2696 0.2688 0.2658 0.2679 0.2684
k 5 6 7 8 9
wSVD 0.2847 0.2862 0.2803 0.2770 0.2786
k 6 7 8 9 10
Ranking 0.2752 0.2744 0.2737 0.2743 0.2753
4 CONCLUSION AND
PERSPECTIVES
The rating prediction approach is still actively used
and studied in collaborative filtering problems. Pro-
posed solutions come from various machine learning
fields such as classification, regression, clustering, di-
mensionality reduction or density estimation. Their
common approach is to decompose the recommen-
dation process into a rating prediction step, and the
recommendation step. But from the recommenda-
tion perspective, we think other alternatives than rat-
ing prediction should be considered. In this paper, we
proposed a new ranking approach for collaborative fil-
tering: instead of predicting the ratings as most meth-
ods do, we predict scores that respect pairwise pref-
erences betweens items, as we think correctly sorting
the items is more important than correctly predicting
their ratings. We proposed a new algorithm for rank-
ing prediction, defined a new evaluation protocol and
compared our approach to two rating prediction ap-
proaches. While the primary results are not as good
as we expected with respect to the mean ranking error,
we are confident they can be explained and improved
by studying user level normalization, convergence cri-
teria and regularization. We are planning to explore
the relations between collaborative filtering and other
tasks such as text analysis (e.g. text segmentation,
(Caillet et al., 2004) ) and multitask learning (Ando
and Zhang, 2005), in order to extend our work to other
ICEIS 2007 - International Conference on Enterprise Information Systems
150

frameworks such as semi-supervised learning (Amini
and Gallinari, 2003).
ACKNOWLEDGEMENTS
The authors would like to thank Trang Vu for her
helpful comments. This work was supported in part
by the IST Programme of the European Commu-
nity, under the PASCAL Network of Excellence, IST-
2002-506778. This publication only reflects the au-
thors view.
REFERENCES
Amini, M.-R. and Gallinari, P. (2003). Semi-supervised
learning with explicit misclassification modeling. In
Gottlob, G. and Walsh, T., editors, IJCAI, pages 555–
560. Morgan Kaufmann.
Amini, M.-R., Usunier, N., and Gallinari, P. (2005). Auto-
matic text summarization based on word-clusters and
ranking algorithms. In Proceedings of the 27th Euro-
pean Conference on IR Research, ECIR 2005, San-
tiago de Compostela, Spain, March 21-23, Lecture
Notes in Computer Science, pages 142–156. Springer.
Ando and Zhang (2005). A framework for learning predic-
tive structures from multiple tasks and unlabeled data.
Journal of Machine Learning Research.
Breese, J. S., Heckerman, D., and Kadie, C. (1998). Empir-
ical analysis of predictive algorithms for collaborative
filtering. Proceedings of the Fourteenth Conference
on Uncertainty in Artificial Intelligence.
Caillet, M., Pessiot, J.-F., Amini, M.-R., and Gallinari, P.
(2004). Unsupervised learning with term clustering
for thematic segmentation of texts. In Proceedings of
the 7th Recherche d’Information Assiste par Ordina-
teur, Avignon, France, pages 648–656. CID.
Canny, J. (2002). Collaborative filtering with privacy via
factor analysis. Proceedings of the 25th annual in-
ternational ACM SIGIR conference on Research and
development in information retrieval.
Chee, S., Han, J., and Wang, K. (2001). Rectree: An ef-
ficient collaborative filtering method. In Data Ware-
housing and Knowledge Discovery.
Deshpande, M. and Karypis, G. (2004). Item-based top-
n recommendation algorithms. ACM Transactions on
Information Systems (TOIS).
Dhillon, I. S. and Sra, S. (2006). Generalized nonnega-
tive matrix approximations with bregman divergences.
NIPS.
Herlocker, J., Konstan, J., and Riedl, J. (1999). An algorith-
mic framework for performing collaborative filtering.
Herlocker, J., Konstan, J., Terveen, L., and Riedl, J. (2004).
Evaluating collaborative filtering recommender sys-
tems. ACM Transactions on Information Systems.
Hofmann, T. (2004). Latent semantic models for collabora-
tive filtering. ACM Trans. Inf. Syst., 22(1):89–115.
Lee, D. D. and Seung, H. S. (1999). Learning the parts of
objects by non-negative matrix factorization. Nature.
Marlin, B. (2003). Modeling user rating profiles for col-
laborative filtering. Advances in Neural Information
Processing Systems.
Marlin, B. (2004). Collaborative filtering: A machine learn-
ing perspective.
Pessiot, J.-F., Truong, V., Usunier, N., Amini, M., and
Gallinari, P. (2006). Factorisation en matrices non-
negatives pour le filtrage collaboratif. In 3eme Con-
ference en Recherche d’Information et Applications
(CORIA’06), pages 315–326, Lyon.
Srebro, N. and Jaakkola, T. (2003). Weighted low rank ap-
proximation. In ICML ’03. Proceedings of the 20th
international conference on machine learning.
Srebro, N., Rennie, J. D. M., and Jaakkola, T. S. (2004).
Maximum-margin matrix factorization. In Saul, L. K.,
Weiss, Y., and Bottou, l., editors, Advances in Neural
Information Processing Systems 17. MIT Press, Cam-
bridge, MA.
LEARNING TO RANK FOR COLLABORATIVE FILTERING
151
