
CONTEXT AWARENESS OF MOBILE CONTENT DELIVERY
BASED ON FINE LOCATION ESTIMATE
Tomohisa Yamashita, Daisuke Takaoka, Noriaki Izumi
Akio Sashima, Koichi Kurumatani and Koiti Hasida
National Institute of Advanced Industrial Science and Technology (AIST)
CREST, Japan Science and Technology Agency (JST)
Sotokanda 1-18-13, Chiyoda-ku, Tokyo, 101-0021 Japan
Keywords:
Active RFID system, Context-awareness, Mobile service, Content delivery, Location estimate.
Abstract:
In this paper, to tackle with uncertainty in the real world, the light-weight ontology drive approach is proposed
for the realization of context dependent services. We concentrate on position information and an operation his-
tory, as a user’s context, and develop our location-aware content delivery system. The evaluation experiment
of our location estimate engine is performed in Akihabara Software Showcase at Information Technology Re-
search Institute. Furthermore, through the proofing experiment in Expo 2005 Aichi, our proposed architecture
is confirmed to enables us to realize the real world application of context dependency. Finally, we compare
our location-aware content delivery system and related researches, and discus the advantage of our system.
1 INTRODUCTION
Because of the rapid development of ubiquitous com-
puting technology, various mobile services have been
realized using personal devices, cellular phones and
IC cards, including i-mode (NTT-DoCoMo, 2007),
EZweb (KDDI, 2007), Suica (JR-EAST, 2007), and
so on. These services emphasize information access
during movement, but it is necessary to deal with rich
context of users, such as operation histories as posi-
tion information, to also provide context dependency.
In fact, development of weak radio and positioning
technologies make it difficult to realize context sen-
sitive services in the real world. Therefore, research
issues of uncertainty remain among various theories
and applications.
To tackle these issues, two main approaches have
been proposed. The first approach is realization of
pull-type services based on passive IC-tag technolo-
gies. Although this approach can achieve extremely
robust service to the uncertainty of device operation,
the data utility in context dependency has been left in
the operation of a user. Another approach is based on
the logic of probability, including Bayesian networks.
Although the introduction of various parameters en-
ables detailed tuning, time and cost issues pertain in
adjustment because of embedded logic.
From the standpoint of tackling uncertainty in the
real world, we propose a lightweight-ontology drive
approach to achieve context-dependent services. To
distinguish the observed objects and the observing
subject in a real-world application, ontologies of ar-
eas and services were developed. A mechanism of ad-
justment for the real-world application is developed in
mapping between the proposed ontologies. Through
the proofing experiment in Expo 2005 Aichi (EXPO,
2005), we have confirmed that our proposed architec-
ture enables realization of the real-world application
of context dependency.
2 DESIGNING CONTEXT
AWARENESS
In this study, we specifically examine position infor-
mation as a user’s context because position informa-
tion of a user shows the existence of relations with
surrounding objects tells what kind of relationship the
object has with the user. In this paper, the concept
of ”Context Awareness” is realized through develop-
ment of location-dependent content delivery. We ap-
ply an active RFID system as human location sensor
because it is only location estimate system of a large
185
Yamashita T., Takaoka D., Izumi N., Sashima A., Kurumatani K. and Hasida K. (2007).
CONTEXT AWARENESS OF MOBILE CONTENT DELIVERY BASED ON FINE LOCATION ESTIMATE.
In Proceedings of the Ninth International Conference on Enterprise Information Systems - SAIC, pages 185-190
DOI: 10.5220/0002401201850190
Copyright
c
SciTePress

number of visitors. However, there is no robust loca-
tion estimate system in uncertain environment.
2.1 Bridging by Linearizing
Simplification
By supposing that we can obtain an ideal environment
in which radio wave conditions are extremely stable
in the real world, the distance from an RFID tag to
an RFID receiver is calculable based on the Received
Signal Strength (RSS) of an RFID receiver. However,
it is difficult in the real world to observe the RSS pre-
cisely for the reason that the received RSS by RFID
receivers is extremely unstable even though an RFID
tag remains in a single position. Moreover, the insta-
bility of radio wave conditions is also reported as a
result of reflection and phasing phenomena.
To tackle real-world instability, we employ the
number of detections of a tag ID as the key parameter
for estimating its location, instead of the RSS. Re-
garding the robustness of computation, we propose a
linearizing simplification to the relationship between
the number of detections of a tag ID by an RFID re-
ceiver (antenna) and the distance from an RFID tag
to an RFID receiver, we then regard this relationship
as ”the closer an RFID tag is located to an RFID re-
ceiver, the higher the number of detections of a tag ID
by an RFID receiver.” This linearizing simplification
decreases the complexity of the location estimation
algorithm and enables adjustment of the parameters
in a practical period.
2.2 Lightweight Ontology
To realize a method of location estimation with the
above approximation as a computational algorithm,
we must clarify a distinction between a representa-
tion of how we recognize location and a parameter
that indicates how a computation is adjusted to the
real world. Furthermore, from the standpoint of prac-
tical use, it is necessary for the real-world application
to complete both estimating location and adjusting pa-
rameters in a very short period.
From the viewpoint of ontologies, to maintain an
adjustment of a practical application, we must distin-
guish an object that is observed and a subject that is
observing: we must also devise a means to recognize
the real world and a method to infer a location. Fur-
thermore, both of the above ontological aspects of the
location estimation must be compatible to realize a
service that is effective in the real world. The above
discussion underscores the necessity of simplifying a
model of a location estimation and a strategy of a ser-
vice that is provided. Therefore, to retain robustness
Figure 1: Aimulet GH+.
for instability of the real-world environment, we em-
ploy a hierarchical representation of areas that are rec-
ognized and contents that are serviced. At the same
time, strong restrictions and rigorous constraints are
unnecessary from the computational aspect. More-
over, correspondence between areas and contents is
considered as a parameter for adjustment. In this pa-
per, the above architecture of a hierarchical structure
including estimated locations and provided services
with fewer constraints and parameters is designated
as a lightweight ontology.
3 IMPLEMENTATION OF A
CONTENT DELIVERY
3.1 System Architecture
In this section, we explain our location-aware con-
tent delivery system (Sashima, 2004) using Aimulet
GH+, which is composed of Personal Digital Assis-
tants (PDAs) and an active RFID, as shown in Fig.
1.
Aimulet GH+ was developed as a users’ mobile
device for our location-aware content delivery service
in Global House, Expo 2005 Aichi. The system de-
tects the location of a user with Aimulet GH+ every
second. Based on the user’s location, the system up-
dates the content list containing some items of expla-
nations about exhibits that are near the user’s location.
The user chooses one item from the content list and
touches it on the display to play an explanation with
sound, text, and graphics.
Our location-aware content delivery system com-
prises RFID antennas, RFID receivers, an RFID re-
ceiver server, a location estimate engine, and a con-
ICEIS 2007 - International Conference on Enterprise Information Systems
186
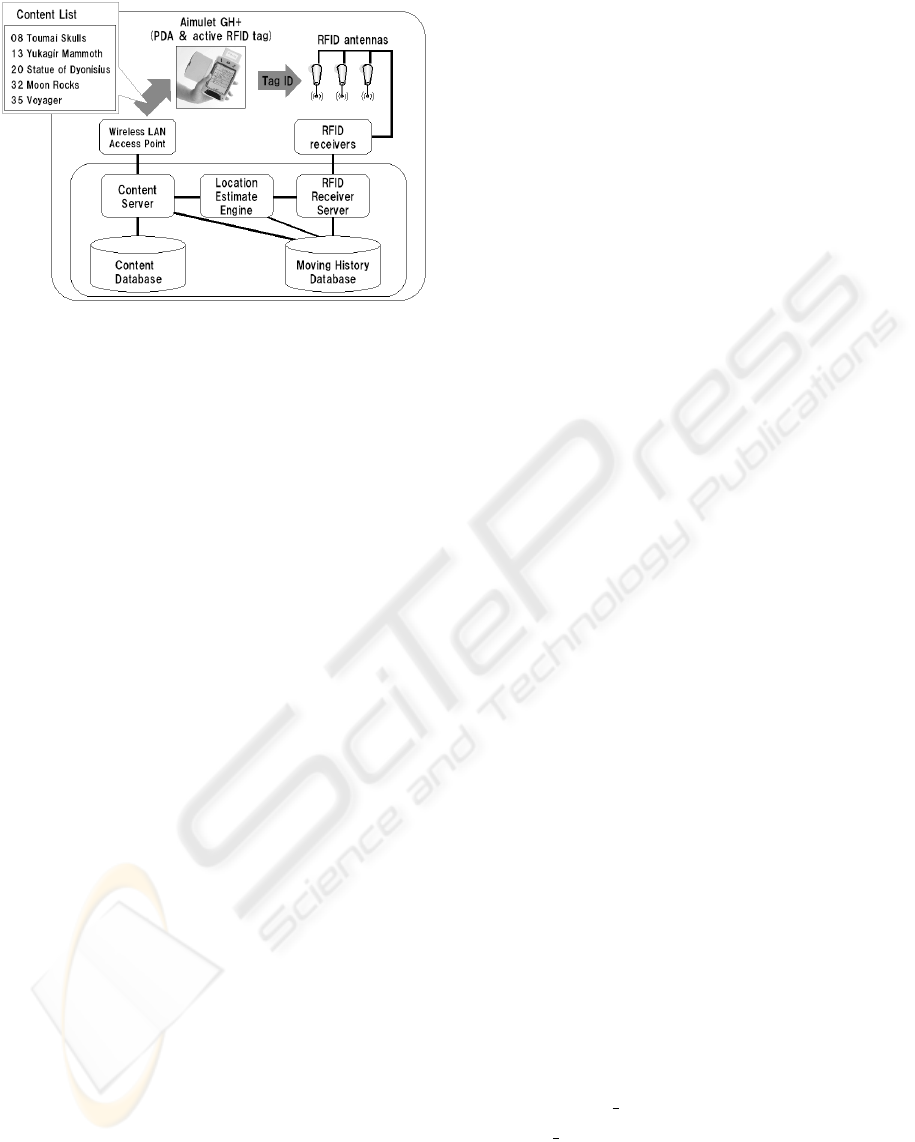
Figure 2: Data flow in the location-aware content delivery
system.
tent server. The data flow of the location-aware con-
tent delivery service with Aimulet GH+ in Fig. 2 is as
follows. An active RFID tag on Aimulet GH+ trans-
mits its tag ID; then RFID receivers detect the tag ID
through RFID antennas and send it to the RFID server.
The RFID server stores RFID data (RFID receiver IDs
detecting a tag ID and their respective time stamps).
The content server sends the user’s subarea to the con-
tent database, and requests a reply including the most
optimal content list.
3.2 Location Estimate
The whole area is divided conceptually into subareas.
The division method is conceptualization as layers;
some kinds of layers are prepared. Subareas in the
same layer have similar size. The sizes of subareas
in the lowest layer are smallest of all layers. Higher-
layer subareas are larger.
The location estimate engine selects one subarea
in a layer where the user with Aimulet GH+ is consid-
ered, with the highest probability, to be located. First,
the location estimate engine selects a subarea in the
lowest layer containing subareas of the smallest size.
Because the subareas in lower layers are small, se-
lection of one subarea there is more difficult. Conse-
quently, the location estimate engine chooses a higher
layer containing larger subareas; it then tries to select
one subarea within that layer. Based on the number of
detections of tag IDs by RFID receivers, the selection
is processed as follows.
First, a set of layers L is defined as
L = {l
1
,l
2
,...,l
i
,...,l
n
}.
(1)
Second, set of subareas S
i
in layer l
i
is defined as
S
i
= {s
1,i
,s
2,i
,...,s
j,i
,...,s
m
i
,i
}.
(2)
A set of RFID receivers R is defined as
R = {r
1
,r
2
,...,r
k
,...,r
l
}.
(3)
Each RFID receiver has a receiver point. Here,
the receiver point rp
r
k
(id, T) for a tag ID id at time
T is the number of detections of tag ID id by RFID
receiver r
k
for one second at time T.
To consider past RFID data of t seconds ago, a
time weight of w
time
(t) is applied. With time weight
w
time
(t), we define the total receiver point trp
r
k
(id, T)
for a tag ID id at time T as
trp
r
k
(id, T) =
∑
t=0
w
time
(t)rp
r
k
(id, T −t).
(4)
Here, the time weight w
time
(t) is a monotonically de-
creasing function.
Each subarea has a subarea point. Here, subarea
point sp
s
j
(id, T) of subarea s
j,i
in layer l
i
for tag ID
id at time T indicates how a user with Aimulet GH+
transmitting tag ID id is considered to exist in subarea
s
j,i
based on receiver points around subarea s
j,i
.
To calculate subarea point sp
s
j,i
(id, T), a contri-
bution ratio is defined. The contribution ratio c
r
k
(s
j,i
)
of receiver r
k
to subarea s
j,i
in layer l
i
indicates how
the detection of RFID receiver r
k
contributes to infer-
ring that an RFID tag transmitting tag ID id exists in
subarea s
j,i
when RFID receiver r
k
detects the tag ID
id. The value of the contribution ratio is determined
based on this supposition: ”The closer an RFID tag
is located to an RFID receiver, the higher the number
of detections of an RFID tag by an RFID receiver.”
Therefore, the closer an RFID receiver is to a subarea
(or included into a subarea), the greater the contri-
bution ratio of an RFID receiver to a subarea. Each
contribution ratio is set as real number in the range
of [0,1.0]. With contribution ratio c
r
k
(s
j,i
), subarea
point sp
s
j,i
(id, T) is defined as
sp
s
j,i
(id, T) =
∑
m
i
p=0
c
r
p
(s
j,i
)trp
r
p
(id, T)
(5)
After calculation of all subarea points in a layer,
the location estimate engine selects one subarea with
the highest subarea point in all subareas in a layer.
However, if little difference exists between the high-
est subarea point sp
1
and the second highest subarea
point sp
2
, the location estimate engine select no sub-
area in layer i; instead, it selects one subarea in the
next-highest layer i+ 1. The condition by which the
location estimate engine rises from layer i to layer
i+ 1 is defined as
min
ratio
i,i+1
≤ sp
2
/sp
1
.
(6)
Here, min
ratio
i,i+1
indicates the minimum ratio by
which the location estimate engine rises from layer i
to layer i+ 1. Otherwise, the location estimate engine
considers that a user with Aimulet GH+ transmitting
tag ID id exists in the subarea with the highest subarea
point.
CONTEXT AWARENESS OF MOBILE CONTENT DELIVERY BASED ON FINE LOCATION ESTIMATE
187
3.3 Content Delivery
The content database has a hierarchical structure of
content lists and replies with a prearranged content
list. For example, in a museum containing some exhi-
bition rooms and passages with many exhibits, in the
case that the content database receives a larger sub-
area in a higher layer, e.g. an exhibition room, the
content database responds with a prearranged content
list that includes (an explanation of) the concept of
the room above and (explanations of) the main ex-
hibits in the room below. In contrast, when the con-
tent server receives a smaller subarea in a lower layer,
e.g., the place in front of a specific exhibit, the con-
tents database replies with a prearranged contents list
that has the exhibit above and other exhibits around it,
along with the concept of the room below. However,
not many such characteristic subareas exist in all sub-
areas. Furthermore, it is difficult to assign a contents
list a priori to each subarea because of the large num-
ber of subareas of all layers.
In light of the problems posed by these issues,
lightweight ontology is introduced to connect the hi-
erarchical structures of the subarea and the content
list. The hierarchical structures of the provided con-
tent list and the estimated subarea are not equivalent.
If the content lists are assigned to characteristic sub-
areas and the hierarchical structure of subareas is de-
fined, then, based on the subarea’s hierarchical struc-
ture, the content database assigns the content list of
the parent subarea to the subarea to which a content
list was not assigned previously. For example, in the
case of a subarea in a middle layer, e.g., the half of
a room to which a content list was not assigned pre-
viously, the content database responds with the same
content list as its parent subarea.
3.4 Evaluation Experiment
The evaluation experiment of our location estimate
engine was performed in the Akihabara Software
Showcase (SSC) at the Information Technology Re-
search Institute (ITRI). In the Akihabara SSC, we
constructed the same system as that in the Global
House.
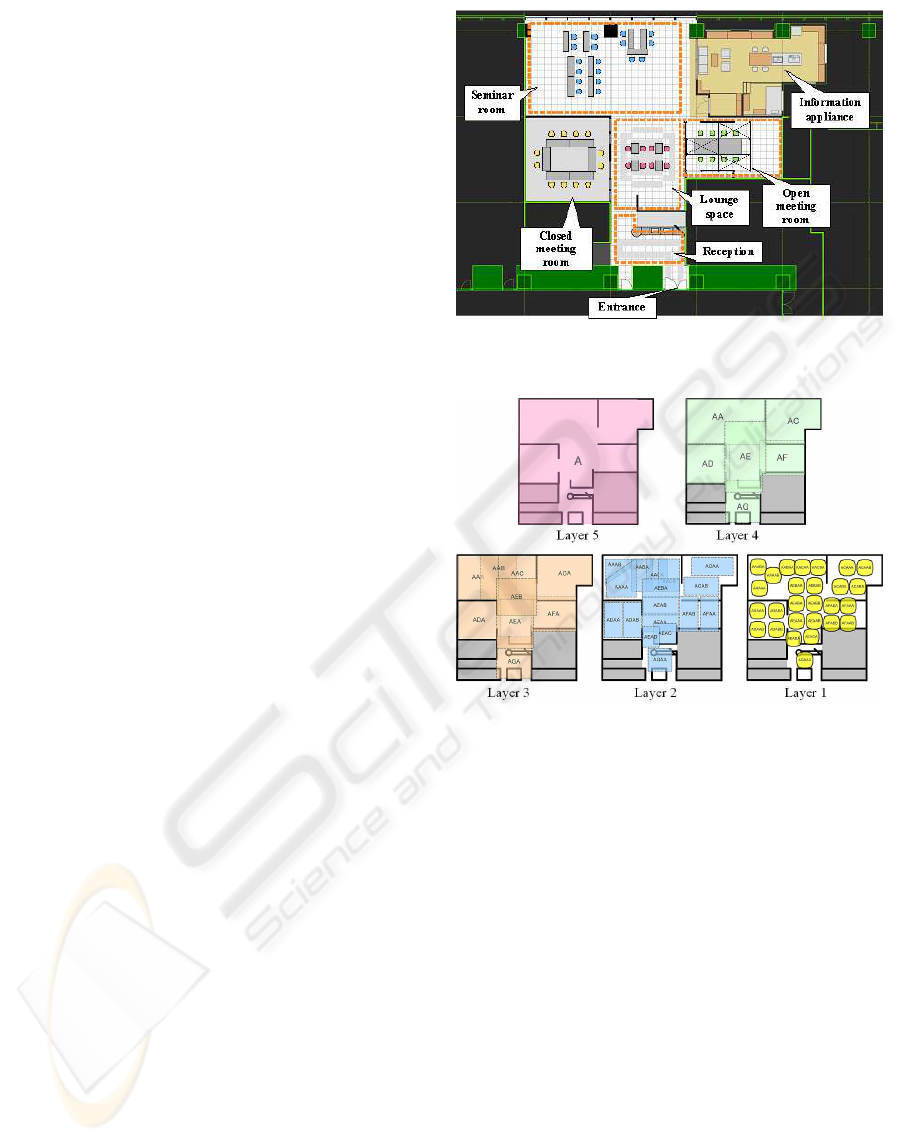
The Akihabara SSC area is 220 square meters
(about 15 m × 15 m). In the Akihabara SSC, 30
RFID antennas and receivers are set on the ceiling.
The whole area of the Akihabara SSC contains six
parts shown in Fig. 3, which are named based on their
facilities: lounge space, seminar room, closed meet-
ing room, open meeting room, reception, and living
room. Because the living room was under construc-
tion, it was impossible to enter it for our evaluation
Figure 3: Ground plan of Akihabara SSC.
Figure 4: Division of subareas in each layer.
experiment. Five layers were prepared for the evalua-
tion experiment, as shown in Fig. 4. Layer 4 had six
subareas. Each subarea corresponded to a room of the
Akihabara SSC in Fig. 3.
The tree structure of the subarea multi-layer sys-
tem is portrayed in Fig. 5. In this structure, the par-
ent of subarea SEACA is subarea SEAC, whose par-
ent is subarea SEA. The tree structure of the con-
tent list is also shown in Fig. 5. Here, we show the
case where the location estimate engine output sub-
area SEAC and SEACA, content database assigns a
content list R based on the content list tree structure.
The minimum ratios used in the evaluation experi-
ment are shown in Table 1.
In our evaluation experiment in the SSC, a sub-
ject with Aimulet GH+ moved around the subareas in
layer 5, and produced an actual subarea record (the
subarea in layer 5 and time in which the subject ex-
isted actually). This one comparison is defined as a
single trial. The correct answers were counted, and
ICEIS 2007 - International Conference on Enterprise Information Systems
188
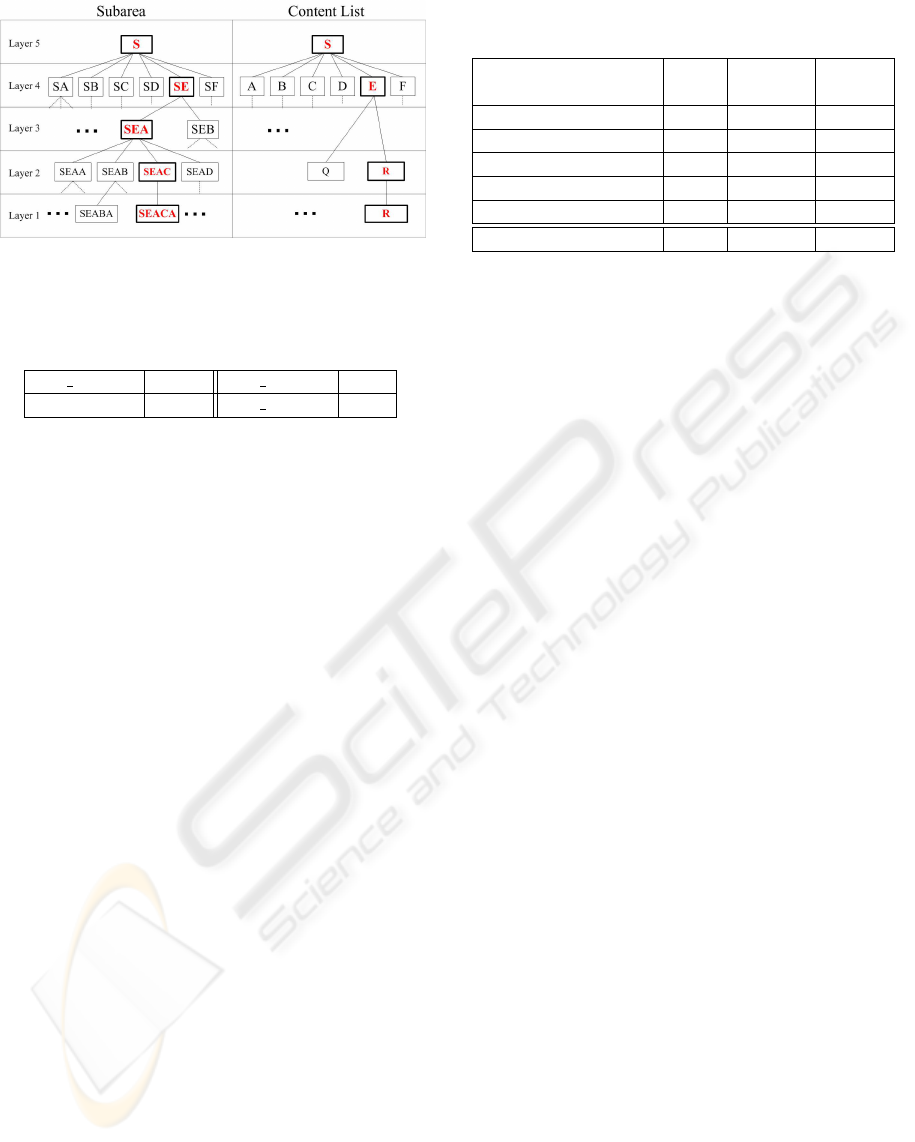
Figure 5: Tree structures of subareas and content lists in
multi-layer system.
Table 1: Minimum ratio in each layer.
min ratio
5,4
0.001 min ratio
4,3
0.05
min
r
atio
3,2
0.05 min ratio
2,1
0.1
the correct rate of each subarea was calculated.
As results of the evaluation experiment, the num-
ber of trials, the number of correct answers, and the
correct rate are listed in Table 2. From Table 2, the
correct rate of the location estimate engine in layer
4 was greater than 80% overall. In the Akihabara
SSC, trial subjects were satisfied with the location-
aware content delivery service using Aimulet GH+
because the provided content list was always suitable
for the subject’s location. Therefore, we confirmed
that our location estimate engine had sufficient accu-
racy to provide appropriate content delivery services
for users.
4 PROOFING EXPERIMENTS IN
EXPO 2005 AICHI
Expo 2005 Aichi was held in Nagoya, Japan (EXPO,
2005) from March 25 through September 25, 2005
(Duration of 185 days). The pavilions were about 90;
22 million visitors attended. Global House had three
parts: The Mammoth Laboratory , the Orange Hall,
and the Blue Hall. The Orange Hall housed a model
of the Yukagir Mammoth, Statue of Dionysus, Moon
Rock, and a model of a Voyager spacecraft.
The Japan Association for the 2005 World Expo-
sition required measures for a large number of vis-
itors, i.e., information service of exhibits to visitors
and for a reduced number of attendees. In the Or-
ange Hall, a maximum of 350 visitors entered every
20 min from 9:30 AM to 8:00 PM. Based on such a re-
quirement, we developed CONSORTS as both a con-
Table 2: Accuracy of our location estimate engine in layer
4.
correct correct
trial answers rate
lounge space 449 406 0.904
seminar room 459 346 0.754
closed meeting room 270 239 0.885
open meeting room 280 227 0.811
reception 80 55 0.688
total 1538 1273 0.828
tent delivery system for visitors with users’ mobile
devices Aimulet GH+ and an exhibition management
support service for managers.
In Orange Hall, we provided the following exhibi-
tion management support for managers (Kurumatani,
2004), i) Detection of locations of individual visitors,
ii) Research of listening rates of contents , and iii)
Monitoring of hall congestion. As a result, we real-
ized information services for visitors and obviated the
need for about 50 attendants compared with a prelim-
inary estimate.
5 DISCUSSION
In this section, we compare our context-aware content
delivery and related studies, and discuss the advan-
tages of our system.
Recently, elemental technology for location esti-
mate has been developed and theoretical research for
spatial information has been advanced. Regarding el-
emental technology, especially that which is related
to location systems with Wi-Fi, the development of
location systems with Wi-Fi has been astonishing in
recent years; it has reached the practical use stage
(EKAHAU, 2005; AeroScout, 2005). Furthermore,
location estimate with Bluetooth, which uses Blue-
tooth RSSI and access points with variable attenua-
tors, has been developed (Bandara, 2004).
From the standpoint of comparison of ontologies,
several spatial ontologies that describe physical space
and spatial relations have been proposed, including
both geometric (e.g., GPS, GIS) and symbolic rep-
resentation (e.g., places that are identified by their
names) of space: DAML-Space, OpenCyc, SUMO,
Region Connection Calculus (RCC). A much-updated
ontology was proposed recently by the Digital Enter-
prise Research Institute (DERI) on WSMO (WSMO,
2005). However, at present, each remains as a pro-
posed description.
Moreover, services that use the ontology of loca-
CONTEXT AWARENESS OF MOBILE CONTENT DELIVERY BASED ON FINE LOCATION ESTIMATE
189

tion have been the subject of studies with similar aims
to ours (Flury, 2004; Lemmens, 2004; Chen, 2004).
However, the descriptions used in those studies rep-
resent simple recognition, e.g., ”the floor consists of
a room and a passage.” These studies did not address
performance in the real world. In another study, a
trail provides the contents of context dependence with
PDA in a real-time application in the real world (Son-
ntag, 2005). However, the clear separation of parame-
ters and ontology is not established in that study. Our
approach not only describes ”how we consider loca-
tion information.” The characteristic of our research
is mapping the structure of service: the structure of a
contents list and the structure of physical area based
on the properties of electromagnetic waves including
a parameter are shown on a map as a representation
of how we recognize location.
6 CONCLUSION
This paper presented a description of applications
of the CONSORTS architecture to an integrated ex-
hibition support system at the Orange Hall of the
Global House at Expo 2005 Aichi. Furthermore, our
location-aware content delivery system with Aimulet
GH+ on CONSORTS was taken up as a characteristic
implemented service in Orange Hall. Results of eval-
uation experiments of our location estimate engine in
Akihabara Software Showcase at Information Tech-
nology Research Institute were obtained. They will
be shown. Finally, outline of implemented services at
the Global House, Expo 2005 Aichi and further eval-
uation and analysis of our system were provided.
REFERENCES
AeroScout (2005). AeroScout, http://www.
aeroscout.co.jp/.
Bandara, U., H. M. I. M. M. H. A. T. (2004). Design and
implementation of a bluetooth signal strength based
location sensing system. In IEEE Radio and Wireless
Conference (RAWCON 2004), pages 319–322.
Chen, H., F. T. J. A. (2004). An ontology for context-
aware pervasive computing environments. In Journal
of Knowledge Engineering Review, volume 18, pages
197–207.
EKAHAU (2005). EKAHAU - Positioning Engine 4.0,
http://www.ekahau.com/.
EXPO (2005). EXPO 2005 AICHI JAPAN,
http://www.expo2005.or.jp.
Flury, T., P. G. R. F. (2004). Owl-based location ontology
for context-aware services. In Artificial Intelligence in
Mobile Systems.
JR-EAST (2007). Super Urban Intelligent Card
(Suica) of East Japan Railway Company (JR-EAST),
http://www.jreast.co.jp/e/index.html/.
KDDI (2007). EZweb, http://www.au.kddi.com/ en-
glish/ezweb/ index.html.
Kurumatani, K. (2004). Mass user support by social co-
ordination among citizens in a real environment. In
Multi-Agent for Mass User Support, Post-Proceedings
of MAMUS-03, Lecture Notes in Artificial Intelligence
3012, volume 3012, pages 1–17. Springer Verlag.
Lemmens, R., d. V. M. (2004). Semantic description of lo-
cation based web services using an extensible location
ontology. In GI-days, pages 261–276.
NTT-DoCoMo (2007). i-mode, http://www. nttdocomo.
co.jp/english/service/imode/index.html.
Sashima, A., I. N. K. K. (2004). Consorts: A multiagent ar-
chitecture for service coordination in ubiquitous com-
puting. In Multi-Agent for Mass User Support, Post-
Proceedings of MAMUS-03, Lecture Notes in Artifi-
cial Intelligence 3012, volume 3012, pages 39–46.
Sonntag, D. (2005). Towards interaction ontologies for mo-
bile devices accessing the semantic web. In 4th Inter-
national Workshop on HCI in Mobile Guides.
WSMO (2005). Web Service Modeling Ontology,
http://www.wsmo.org/.
ICEIS 2007 - International Conference on Enterprise Information Systems
190
