
A Weight Vector Feature for 3D Shape Matching
Yingliang Lu
1
, Kunihiko Kaneko
1
and Akifumi Makinouchi
2
1
Graduate School of Information Science and Electrical Engineering, Kyushu University
Fukuoka, Japan
2
Department of Information and Network Engineering, Kurume Institute of Technology
Fukuoka, Japan
Abstract. In the present paper, we introduce a novel segment weight vector to
matching 3D objects rapidly. We split a 3D object into parts according to its
topology, and make up the extracted the thickness feature of each part as a
feature vector of the 3D object. Furthermore, we present a new solution for
improving the accuracy of the similarity queries. Since the proposed method is
based on partial features, it is particularly suited to searching objects having
distinct part structures and is invariant to part architecture.
1 Introduction
Since 3D models are increasingly created and designed using computer graphics,
computer vision, CAD medical imaging, and a variety of other applications, a large
number of 3D models are being shared and offered on the Web. Large databases of
3D models, such as the Princeton Shape Benchmark Database [10], the 3D Cafe
repository [21], and Aim@Shape network [13], are now publicly available. These
datasets are made up of contributions from the CAD community, computer graphic
artists, and the scientific visualization community. The problem of searching for a
specific shape in a large database of 3D models is an important area of research. Text
descriptors associated with 3D shapes can be used to drive the search process [20], as
is the case for 2D images [23]. However, text descriptions may not be available and
may not apply for part-matching or similarity-based matching. Several content-based
3D shape retrieval algorithms have been proposed [3] [4] [5] [8] [19].
For the purpose of content-based 3D object retrieval, various features of 3D
objects have been proposed [1] [5] [8] [19] [9]. However, these features are global
features. That is, they describe the geometry or topology information of a 3D object
using one feature. The shock graph comparison based retrieval method described in a
previous paper [7] is based only on the topologic information of the shape. An
approach based on a new geometric index structure is suggested in [3]. The basic idea
of this solution is to use the concept of hierarchical approximations of the 3D objects
to speed up the search process. However, this is still based on global features. An
efficient geometrical and partial similarity based method is needed to retrieve 3D
objects.
In the present paper, we propose a novel feature vector of a 3D object. This feature
vector is based on geometrical information rather than on topological information
Lu Y., Kaneko K. and Makinouchi A. (2007).
A Weight Vector Feature for 3D Shape Matching.
In Proceedings of the 7th International Workshop on Pattern Recognition in Information Systems, pages 69-78
DOI: 10.5220/0002414700690078
Copyright
c
SciTePress

alone. The vector is herein referred to as the Segment Weight Vector (SWV). The
SWV is more effective and flexible than the Curve-Skeleton Thickness Histogram
(CSTH) [6] on partially based object matching. Furthermore, we propose a novel
method to search similar objects from 3D object database using the feature. We refine
the result with a filter using the Segment Thickness Histogram (STH) of the curve-
skeleton. In our proposal, a number of similar 3D objects are retrieved from a 3D
object model database if the volume features of the parts of the key object are similar
to any part of the potential candidate 3D objects. The similar objects are inserted into
the candidate pool. As an accuracy improvement step, the 3D objects will be removed
from the candidate pool if the CSTH of the processing part of the key object is not
similar to any CSTHs of the potential candidate object. Therefore, the proposed
method can also be easily implemented on other multi-branch complex graph
matching applications if there are different heavy values on the curves.
The remainder of the present paper is organized as follows. Section 2 provides an
overview of research related to skeleton generation and content-based retrieval. In
Section 3, we describe a feature vector (SWV) of 3D objects based on the topology of
their curve-skeletons and partial geometries. In addition, we describe the Segment
Thickness Histogram (STH) of the curve-skeleton. In Section 4, we describe the novel
algorithm and a similar 3D object retrieval method based on the SWVs and STHs, as
mentioned in Section 3, of the 3D object. The performance test results of different
strategies and a discussion thereof are presented in Section 5. Finally, in Section 6, we
conclude the paper and present ideas for future study.
2 Related Work
A number of different approaches have been proposed for the matching problem.
Using a simplified description of a 3D model, usually in one or two dimensions (also
known as a shape signature), the 3D matching can be implemented by comparing
these different signatures. The dimensional reduction and the simple nature of these
shape descriptors make them ideal for applications involving searching in large
databases of 3D models. Osada et al. in [19] proposed the use of a shape distribution,
sampled from one of many shape functions, as the shape signature. Among the shape
functions, the distance between two random points on the surface proved to be the
most effective for retrieving similar shapes. In [24], a shape descriptor based on 2D
views (images rendered from uniformly sampled positions on the viewing sphere),
called the Light Field Descriptor, performed better than descriptors that use the 3D
properties of the object. In [14], Kazhdan et al. propose a shape description based on a
spherical harmonic representation. Kriegel et al. [1] present an approach for
describing voxelized objects. The cover sequence model approximates a voxelized 3D
object using a sequence of grid primitives (called covers), which are basically large
parallelepipeds. Lau et al. [2] surveyed some representative research on 3D model
retrieval, focusing their analysis on feature matching. Existing methods are divided
into three groups: geometry-based, frequency-based, and topology-based.
Unfortunately, these previous methods cannot deal with partial matching. Another
popular approach to shape analysis and matching is based on comparing graph
representations of shape. Nicu et al. [9] developed a many-to-many matching
70

algorithm to compute shape similarity on the topologic information of the curve-
skeleton. Sundar et al. [5] developed a shape retrieval system based on the skeleton
graph of the shape. These previous methods focus only on the topologic information
of the shape. Unfortunately, the most important shape information (i.e., geometric
information) is neglected. Moreover, using a graph to match shapes is more costly. Lu
et al. [6] proposed a novel shape feature of a 3D model, called the Curve-Skeleton
Thickness Histogram (CSTH). The CSTH is based on the geometric information of
the shape but only describes the matching algorithm of one segment on the curve-
skeleton of a shape model. However, there was no discussion as to how to match two
3D models that have multiple segments on their curve-skeleton.
In [5] [9], curve-skeletons are a 1D subset of the medial surface of a 3D object and
have recently been used in shape similarity matching. A number of algorithms and
applications based on curve-skeletons have developed in the last decade. Topological
thinning methods [15] can directly produce a curve-skeleton that stores the topologic
information of objects. Unfortunately, these algorithms are resolution-dependent and
lose the geometric information of objects. Distance transform methods [12] use the
distance field of volume data to extract the skeleton. Unfortunately, these methods do
not produce a 1D representation directly. Using these methods requires some
significant post-processing. However, some geometric information on the extracted
voxel is maintained.
Various types of fields generated by functions are used to extract curve-skeletons.
They can produce nice curves on medial sheets. The potential at a point interior to the
object is determined as a sum of potentials generated by point charges on the
boundary of the object. Such functions include the electrostatic field function [16] and
the visible repulsive force function [17]. The skeleton points are found by determining
the “sinks” of the field and connecting them using a force following algorithm [11] or
minimizing the energy of an active contour [18], which are used to generate an initial
skeleton in the present paper.
3 Feature Extraction
In this section, we briefly describe the method used to build the thickness of a curve-
skeleton from 3D polygonal models. For details, please refer to Reference [6].
3.1 Skeleton Extraction
A number of methods of skeleton extraction have been reported [11] [12]. The
electrostatic field function [11] can extract well-behaved curves on medial sheets.
Even though the result is connected, the extracted curves are divided into a number of
segments based on electrostatic concentration. However, we need to split the skeleton
into parts based on topology rather than on electrostatic concentration. In Reference
[6], the initial curve-skeleton based on the method in [11] is first extracted. The
distance transform (DT) algorithm [12] was then used to compute the DT of all voxels
on the extracted curve-skeleton (Fig. 2). Finally, in Reference [6], all of the curve-
skeletons of the object were assumed to be connected and to have no branches. Then,
71
a similarity computation method of 3D object models based on the curve-skeletons
thickness distribution of the entire object model was introduced.
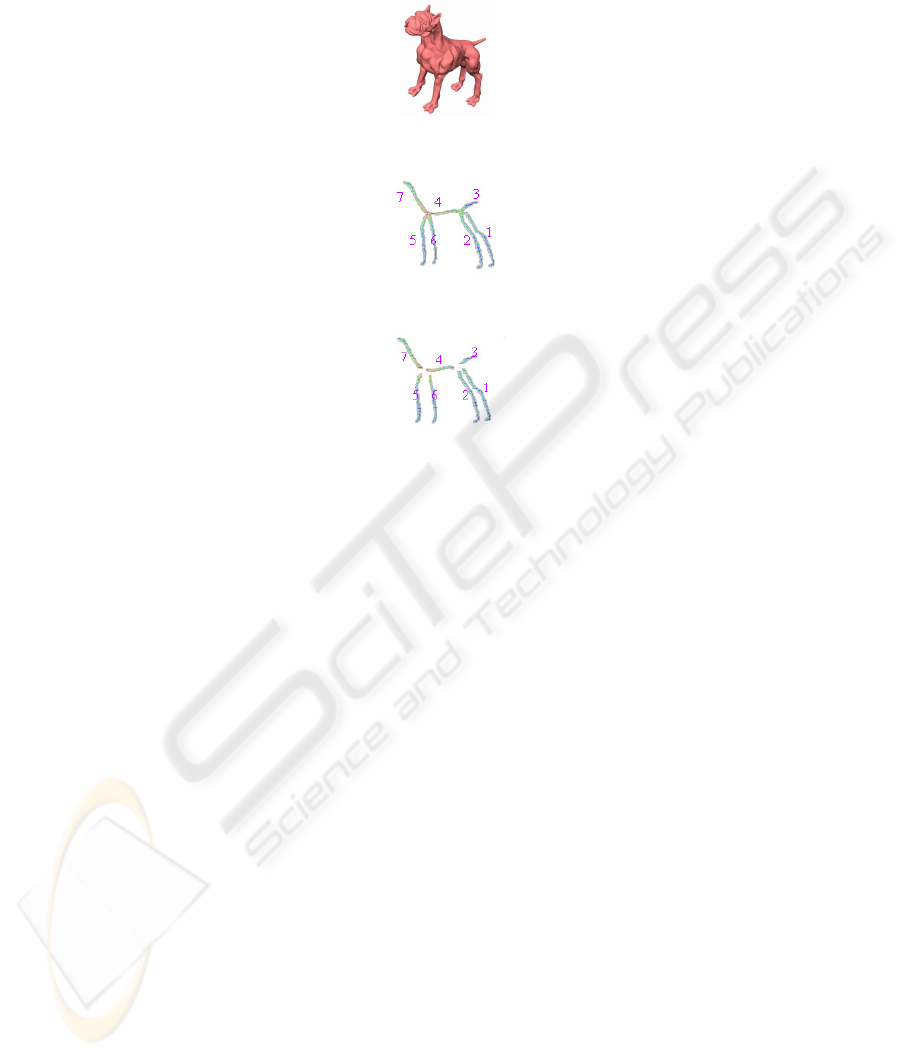
Fig. 1. Three-dimensional model used to extract the skeleton.
Fig. 2. Curve-skeleton with thickness of the 3D model in Fig. 1.
Fig. 3. Segments of the curve-skeleton after splitting the curve-skeleton in Fig. 2.
Generally, there must be several branches on the curve-skeleton of a complex
object (Fig. 1). First, we merge all of the parts separated from the curve-skeleton into
a continuous curve. The continuous curve is then broken into parts according to its
topology (Fig. 3).
3.2 Segment Weight Vector
We herein propose a new partial feature based 3D object feature to represent a part of
a 3D model for similarity measurement. The partial feature of each 3D object is
defined by the volume size of its segment thickness histogram (Fig. 7). We compute
the weight value of all of the parts, which correspond to the segments of the curve-
skeleton. Furthermore, we use these weight values to assemble a vector called the
SWV (as mentioned in Section 1) to represent the global feature of the 3D model.
In order to generate the SWV, we first compute the volume size of each part of
each 3D object using the following formula:
∫
=
x
xi
Tw
(1)
where
i
w is the weight of a segment on the curve-skeleton, which represents a
geometrical feature of the part of the corresponding 3D object to which the segment
belongs, and T
x
represents the thickness of a segment at position x, which indicates
72

the position of a voxel on the segment.
Second, in order to obtain a SWV representation that is invariant with the order of
the 3D model parts for similarity matching, a sorting step is needed. We sort the
weight of parts of a 3D object by descent. The sorted values make up the SWV of a
3D object.
SWV =
),,,(
110 −n
www L
(2)
where
i
w represents the weight of the i-th segment, and
110 −
≥≥≥
n
www L .
Therefore, in order to obtain an SWV that is invariant with the scale of a 3D model
for similarity matching, a normalization step is needed. We normalize the vector by
its maximum value, as follows:
0
/ www
ii
=
,
(3)
where i represents the index of
i
w in a sorted SWV, and
110 −
≥≥≥
n
www L ,
]1,1[ −∈ ni
. The normalized and sorted SWV is denoted as SWV ,
),,,,1(
1
21
−
=
n
wwwSWV L .
(4)
3.3 Normalization of the Segment Thickness
In order to obtain the Segment Thickness Histogram (STH) representation that is
invariant with the scale of a 3D model for similarity measurement, a normalization
step is needed. The horizontal axis of the distribution should be normalized with a
fixed value. Moreover, the vertical axis should be zoomed by a ratio that is equal to
the zoom ratio of horizontal normalization. Using the normalization strategy, we use
the variation of each STH of the object as a feature of the object. Furthermore, in this
method, we treat the proportion of the length of a segment and the thickness
distribution along with the segment as a component of the feature.
4 Searching Algorithm
After the SWVs of the 3D models are constructed, we need a dissimilarity measure in
order to compare two 3D models. In this section, we describe how to compare two
SWVs and how to retrieve 3D objects from a database by their partial geometrical
features.
In our implementation, we have performed an experiment using a simple
dissimilarity measure based on the L
N
norms function with n = 2. We used the
following formula:
2
()
ii
i
D
issimilarity X Y=−
∑
(5)
73
where X
i
and Y
i
represent the i-th elements in two SWVs.
Our main idea is based on the fact that two objects are similar if all of their
corresponding parts are geometrically similar. Thus, if the volumes and thicknesses
the histograms of two 3D objects are similar for each segment of their curve-skeletons,
then the two 3D objects may be similar.
However, the similar segment thickness histograms retrieval is a multidimensional
database problem. We developed a new algorithm to improve the retrieval
performance. First, we find 3D models from the database by matching the SWVs.
Therefore, we need to use a similar object retrieval strategy that uses STHs to
improve the retrieval accuracy.
In order to retrieve the most similar objects, we first sort the 3D objects by their
SWV similarity. In our implementation, we retrieve only the 3D objects of which the
total numbers of segments (number of elements in their SWVs) are the same. We then
sort the retrieved result set based on the similarity of their SWVs and select only the
top m objects for the next step.
Second, we use STHs of the selected 3D objects to improve the accuracy of the
retrievals. We retrieve the most similar n segments from the selected 3D object set.
This 3D object set includes only the m objects output in the first step. In addition,
each of the n retrieved segments belongs to different 3D objects. The retrieved result
is shown in Table 1. In the table, KS indicates the key object with an m-segment
curve-skeleton, and KS.SG
1
is the segment that has the largest STH volume. In
addition, CS
21
.SG
x
indicates that the segment SG
x
is on the curve-skeleton of the CS
21
object. Finally, the most similar 3D objects are found from Table 1 using SQL. The
3D objects having the largest number of similar segments are reported as the result of
3D object retrieval. In addition, the final step is to find the 3D objects that they have
the most amounts in the candidate pool of Table 1.
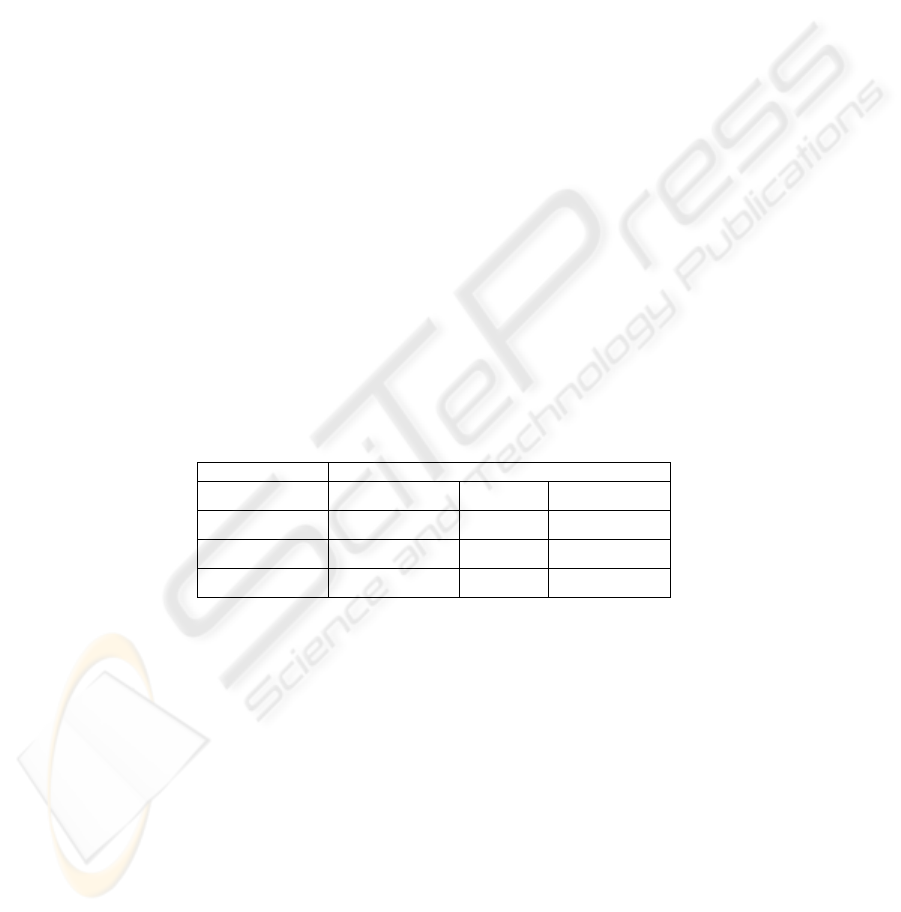
Table 1. Candidate pool of the key object.
Key Candidate pool
KS.SG
1
CS
11
.SG
x
⋯
CS
1n
.SG
x
KS.SG
2
CS
21
.SG
x
⋯
CS
2n
.SG
x
⋮ ⋮ ⋮ ⋮
KS.SG
m
CS
m1
.SG
x
⋯
CS
mn
.SG
x
5 Experiment and Discussion
In order to test the proposed feasibility of the similar object retrieval strategy, we
implement the present algorithms on a Linux system by C++ and PostgreSQL. We set
the resolution of the volume data as
200200200
×
×
in the volume voxelization
procedure. We used the Princeton shape database [10] as the test data in the present
study. We found that the proposed method works well for similar object retrieval
based on the geometrical feature of partial bodies.
Although there are 1,814 3D objects in the Princeton shape database, we only
generated 1,453 curve-skeletons of 1,453 3D models from the database because the
74
skeleton-making algorithm cannot generate a curve-skeleton from some 3D models.
In addition, the generated 1,453 curve-skeletons include 51,952 segments in our test
database.
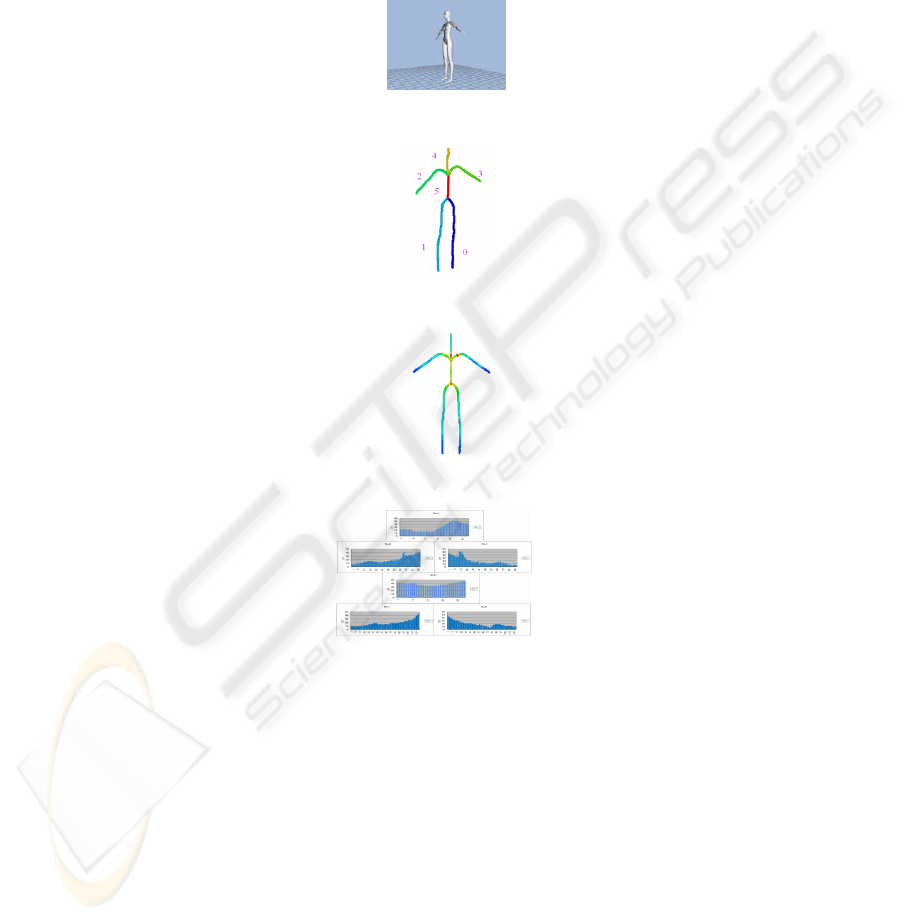
The key object (Fig. 4) of test has six segments on its curve-skeleton (Fig. 5).
These segments belong to a head (number of segments: 4), a trunk of a body (number
of segments: 5), and four limbs (numbers of segments: 0, 1, 2, and 3). Since each
segment has its own thickness histogram, the key object has six independent thickness
histograms (Fig. 7).
Fig. 4. Key model used to search the 3D model database.
Fig. 5. Segment number of the curve-skeleton of the key model in Fig. 4.
Fig. 6. Curve-skeleton with thickness of the key model in Fig. 4.
Fig. 7. Thickness distribution graph on the segments of the curve-skeleton of the key model in
Fig. 4.
In order to test the feasibility of the similar object retrieval strategy proposed
herein, we implement the proposed algorithms in two ways.
First, we test the similar object retrieval strategy only by STHs. The results are shown
in Fig. 8. In addition, in order to find no more than 30 objects using a segment of a
key object (Fig. 4), we set the parameter n (number of maximum retrieval results) as
30 for the experiments. Our filtering program retrieves 30 objects by each STH of the
key object and then inserts these objects into the temporary table. In order to find the
objects of which the STHs match the key object for the head, the trunk of the body,
and the four limbs, we need to find the best objects from each result set of the six
75
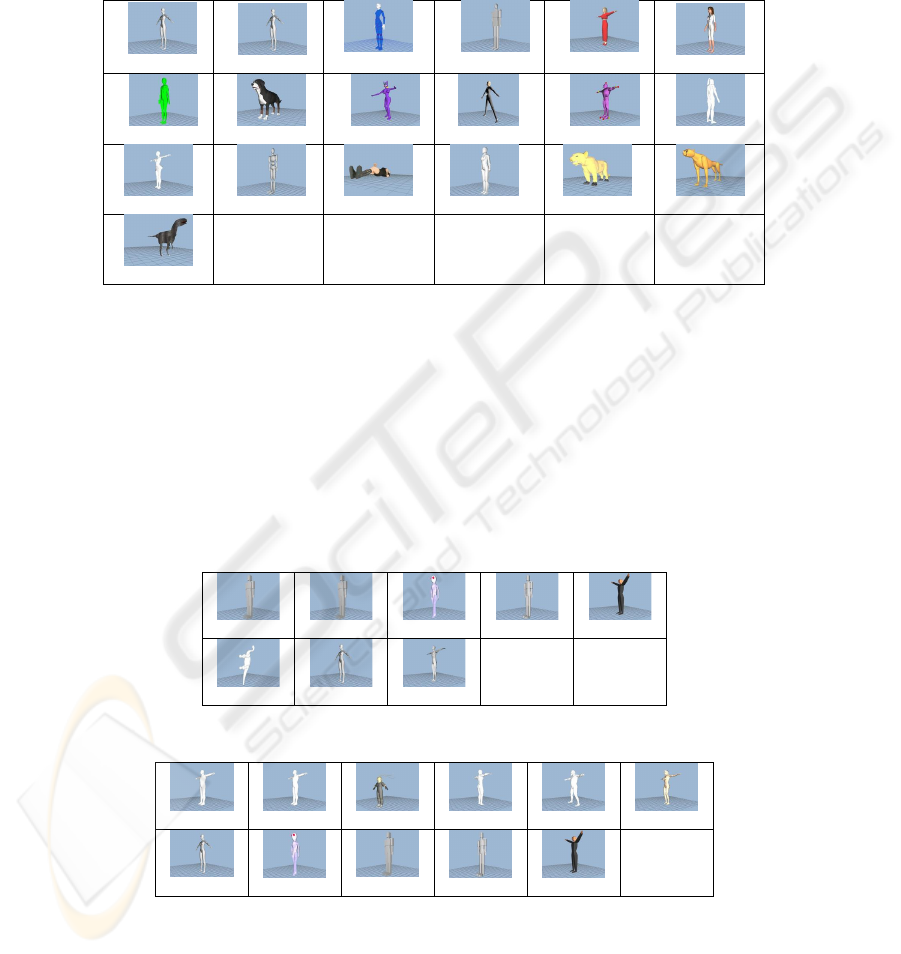
parts. We obtain eighteen objects in which each of the six key parts has a matching
part. Figure 8 shows a number of result objects of the object retrieval test and reveals
that the proposed method can find similar objects and retrieve the models that have
parts that are similar to the key object (e.g., result 7 in Fig. 8). The part of the tail of
result 7 does not have a part that is similar to the key object, and therefore cannot be
reported based on global features.
Key
Result 1
Result 2 Result 3 Result 4
Result 5
Result6 Result 7 Result 8 Result 9 Result 10 Result11
Result 12 Result 13 Result 14 Result 15 Result 16 Result17
Result 18
Fig. 8. Results of retrieval by the dissimilarity of the Segment Thickness Histograms only.
We test the similar object retrieval by partial geometry. In addition, we retrieve 3D
objects from a database using their SWV similarity. Furthermore, we use the STH
similarity to improve the retrieval accuracy. The results retrieved by different keys are
shown in Figs. 9 and 10.
Finally, we also compare the retrieval performance of the two methods mentioned
above. We test the retrieval performance by the different key objects (m221, m202,
m213, m224, m233, m258 in the Princeton shape database). The result, shown in Fig.
11, indicates that the second method can be used to more quickly obtain the result set.
In addition, the second method can retrieve a more accurate result set from the test
database.
Key Result 1 Result 2 Result 3 Result 4
Result 5 Result 6 Result 7
Fig. 9. Results of retrieval by the dissimilarity of Segment Weight Vector initially.
Key
Result 1 Result 2 Result 3 Result 4
Result5
Result 6
Result 7
Result 8
Result 9 Result 10
Fig. 10. Results of retrieval by the dissimilarity of Segment Weight Vector initially.
76

Fig. 11. Retrieval performance comparison of the two methods mentioned above.
6 Conclusions and Future Studies
We novel proposed a partial feature named SWV to retrieve 3D model by their partial
similarity. In addition, the 3D object retrieval method proposed in the present paper is
based on partial geometry similarity between 3D objects. First, the proposed method
extracts a curve-skeleton with thickness. Second, we compute the dissimilarity of the
SWV (mentioned in Section 1) and propose a novel 3D object retrieval strategy using
the computed dissimilarity. Third, we compute the dissimilarity of the Segment
Thickness Histograms (STHs) of each part with respect to the objects. Finally, we use
the dissimilarity of STHs to improve the accuracy of the retrieval. It is possible to
effectively retrieve 3D models by partial similarity in the present experiments.
Since these SWVs and STHs are extracted from 3D objects using the geometrical
information of a 3D object, the 3D objects can be compared based on geometrical
information rather than on topologic information alone. Since each of the elements of
the SWV and the STH are a partial feature of a 3D object, both the SWV and the STH
can compare two 3D objects based on their partial features, rather than on their global
features alone. Good efficiency and good results were obtained in the present
experiments using the proposed method.
References
1. Hans-Peter Kriegel , Stefan Brecheisen , Peer Kröger , Martin Pfeifle , Matthias Schubert,
Using sets of feature vectors for similarity search on voxelized CAD objects, Proceedings
of the 2003 ACM SIGMOD international conference on Management of data, June 09-12,
2003, San Diego, California.
2. R.W.H. Lau and B. Wong, “Web-Based 3D Geometry Model Retrieval,” World Wide Web
Journal, Kluwer Academic Publishers, 5(3):193-206, 2002.
3. D. Keim. “Efficient Geometry-based Similarity Search of 3D Spatial Databases”. In Proc.
ACM SIGMOD Int. Conf. on Management of Data (SIGMOD'99), Philadelphia, PA, pages
419-430, 1999.
4. F. Korn, N. Sidiropoulos, C. Faloutsos, E. Siegel, and Z. Protopapas. “Fast Nearest
Neighbor Search in Medical Image Databases”. In Proc. 22th Int. Conf. on Very Large
Databases (VLDB'96), pages 215-226, 1996.
5. H. Sundar, D. Silver, N. Gagvani, and S. Dickenson: Skeleton based shape matching and
retrieval SMI 2003, pages 130-139,2003
77

6. Y. Lu, K. Kaneko and A. Makinouchi: 3D Shape Matching Using Curve-Skeletons with
Thickness, 1st Int. Workshop on Shapes and Semantics, June 2006
7. K. Siddiqi, A. Shokoufandeh, S. Dickinson, and S. Zucker: Shock graphs and shape
matching International Journal of Computer Vision, 30:1-24,1999
8. M. Hilaga, Y. Shinagawa, T. Kohmura, and T. Kunii: Topology Matching for Fully
Automatic Similarity Estimation of 3D Shapes ACM SIGGRAPH 2001 Proceedings, 2001
9. Nicu D. Cornea, M. Fatih Demirci, Deborah Silver, Ali Shokoufandeh, Sven J. Dickinson,
Paul B. Kantor: 3D Object Retrieval using Many-to-many Matching of Curve Skeletons
International Conference on Shape Modeling and Applications SMI 2005. MIT, Boston,
MA. June 15-17,2005
10. P. Shilane, M. K. P. Min, and T. Funkhouser: The princeton shape benchmark Shape
Modeling International, Genoa, Italy, June, 2004
11. N. Cornea, D. Silver, X. Yuan, R. Balasubramanian: Computing Hierarchical Curve-
Skeletons of 3D Objects The Visual Computer, Vol. 21, No. 11, pp. 945-955,2005
12. N. Gagvani and D. Silver: Parameter controlled volume thinning Graphical Models and
Image Processing, 61(3): 149-164,1999
13. AIM@SHAPE Network of Excellence, ( http://www.aimatshape.net/ ).
14. M. Kazhdan, T. Funkhouser, and S. Rusinkiewicz: Rotation invariant spherical harmonic
representation of 3d shape descriptors In Symposium on Geometry Processing, pages 167-
175,2003
15. Toyofumi Saito, Satoshi Banjo and Jun-ichiro Toriwaki: An improvement of three
dimensional thinning method using a skeleton based on the Euclidean distance
transformation - a method to control spurious branches, IEICE Trans. on Inf. and Syst.,
Japan, J84-D-II, 8, pp.1628-1635 (2001.8)
16. T. Grigorishin, Y.H. Yang. Skeletonization: An Electrostatic Field-Based Approach Pattern
Analysis and App., 1:163-177,1998
17. F. Wu, W. Ma, P. Liou, R. Liang, M. Ouhyoung: Skeleton Extraction of 3D Objects with
Visible Repulsive Force Eurographics Symp. On Geometry Processing, 2003
18. W. Ma, F. Wu, M. Ouhyoung: Skeleton Extraction of 3D Objects with Radial Basis
Functions IEEE SMA, 2003.
19. R. Osada, T. Funkhouser, B. Chazelle, and D. Dobkin: Matching 3D Models with Shape
Distributions Shape Modeling International, Genova, Italy, May,2001
20. Princeton Shape Retrieval and Analysis: 3D Model Search
http://shape.cs.princeton.edu/search.html
21. 3D Cafe: http://www.3dcafe.com/asp/freestuff.asp
23. Google Image Search: http://www.google.com/
24. Chen, D.Y., Ouhyoung, M., Tian, X.P., Shen, Y.T., Ouhyoung, M.: On visual similarity
based 3D model retrieval. In: Proc. Eurographics, Granada, Spain (2003)
78
