
A Multi Agent Decision Support System for Real Time
Scheduling
N. Taghezout
1
and P. Zarate
2
1
Computer Science Department, University of Es-Senia Oran,
BP 1524, El-M' Naouer, 31000, Oran, Algeria
2
IRIT – INPT – ENSIACET, 118 route de Narbonne 31062 Toulouse Cedex 9, France
Abstract. The environment of firms and market requirements necessitates a
performance increased by the product flux management in the course of their
manufacture. This management plays a certain number of functions among
which the scheduling of workshop is taking more and more importance. This
article presents an approach which takes into account robustness and flexibility
of a real time scheduling, by defining and undertaking an interactive decision
support system. We develop a structure of piloting and supervising of distrib-
uted and integrated, as well as reactive workshop. Independent modules of pi-
loting in the latter allow organizing resource tasks and adapting generated plans
according to disturbances. As support to modelling and decisional system im-
plantation, we propose a multi-agent system. The agent actions of the same hi-
erarchical level become concrete across the analysis and reaction procedures.
The decision centres negotiate compromises to solve conflicts, under the con-
trol of a supervisor entity.
1 Introduction
Planning and control for manufacturing problems are the most common manufactur-
ing application. Design process, and information integration are the other two main
domains of applications. Scheduling is one of the crucial tasks guaranteeing the
smooth execution of activities that is defined as the temporal assignment of activities
to resources where a number of goals and constraints have to be considered [3]. It is a
difficult and complex problem solving, particularly when it takes place in an open,
dynamic environment.
Dynamic scheduling (also known as reactive scheduling), which can react to a
dynamic environment and adjust the planning as fast as possible, is growing rapidly
in importance, and close attention has been paid to it by many researchers in recent
decades. In this paper, we use dynamic scheduling mechanism to indicate that a real-
time manufacturing scheduling can update its schedule to adapt to changing situations
such as new order insertion, machine failure, and job tardiness.
The approach introduced in this article tries to exploit the advantages of static and
dynamic techniques of scheduling; it is based on three (3) proposals:
Taghezout N. and Zarate P. (2007).
A Multi Agent Decision Support System for Real Time Scheduling.
In Proceedings of the 4th International Workshop on Computer Supported Activity Coordination, pages 55-65
DOI: 10.5220/0002420300550065
Copyright
c
SciTePress

1. The first one consists in generating a set of acceptable solutions in the
scheduling phase from the initial plan of production.
2. The second one consists in exploiting this set of real-time solutions by an in-
teractive decision support system.
3. The third one tries to take advantage of entity modelling thanks to the agent
formalism in order to exploit the following two characteristics.
The first one attempts to establish a correspondence between the distribution as-
pect of the agents system and the physical dynamic distribution of resources in PS
(production system).
The second one defines the high degree of flexibility which characterizes the
multi agent model. This makes the adaptation of the piloting structure easier to the
changes of PS configuration.
We argue that the agent-based technology has emerged as a new paradigm for
conceptualizing, designing, and implementing software systems. Multi-agent systems
(MAS) enhance overall system performance, in particular along such dimensions as
computational efficiency, reliability, extensibility, and flexibility. They are also capa-
ble of solving the problem of matching supply to demand and allocating resources
dynamically in real time, by recognizing opportunities, trends and potentials, as well
as carrying out negotiations and coordination [5].
Because of its highly combinatorial aspects and its practical interest for manufac-
turing systems, the scheduling problem has been widely studied in the literature
through various alternative methods and techniques [7]: Heuristics, constraints propa-
gation techniques, simulated annealing, genetic algorithms, etc.
Agent technology has recently been considered as a successful attempt to treat the
distributed aspect of those methods. Agent approach replaces the central framework
with a network of agents, each endowed with a local view of its environment and the
ability to respond locally to that environment [13]. Then the overall system perform-
ance is not globally planned, but emerges through the dynamic interaction of agents
in real time.
ADDYMS developed a dynamic scheduling mechanism for local resource alloca-
tion at the local work cell level [9]. [10] proposed a holonic architecture for the dy-
namic scheduling of manufacturing systems. It also presented a negotiation protocol
based on the contract net protocol and suitable for the dynamic scheduling of manu-
facturing tasks [10].
[13] presents a multi agent system that is an implementation of a distributed pro-
ject management tool, activities, resources, and important functions are represented as
agents in a network. Methods to schedule activities and resolve resource conflicts by
message exchanging and negotiation among agents are presented [13].
The proposed system has for objectives:
1. to develop in real-time the set of solutions offered by the projected scheduling by
updating it according to the decisions taken and (unpredictable) significant events.
2. to help choosing decision on the basis of updated set of solutions.
3. to offer local modifications on the set of solutions
This paper describes a tool structure for resolving real time scheduling problem
and shows how it can be applied to solve the real time scheduling problem. Section 2
presents a DSS architecture and specification of a compositional agent. The concepts
used are defined, and the state of the workshop is introduced in the third section.
56

Section 4 details the specific agents involved (ISP agent and supervisor agent) in
terms of their specific tasks, while section 5 deals with interaction between agents
(negotiation form). Finally, Section 6 discusses the results of the DSS and highlights
those aspects which require further work (multicriteria methodologies).
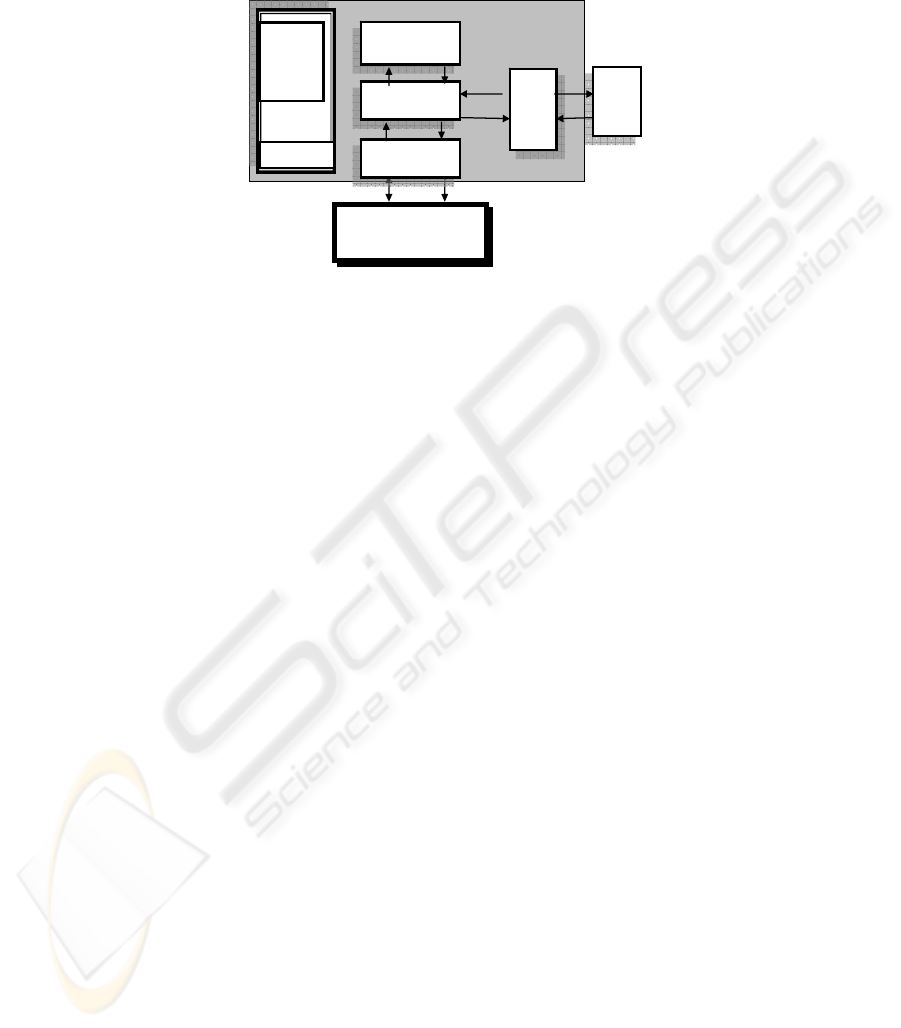
2 Description of the DSS Architecture
The DSS architecture is composed of several modules. Each module has its own
functionalities and objectives. The DSS architecture is described in the figure 1. The
module of analysis and reaction is developed thanks to a multi-agent technology. The
agent based system is decomposed into a supervisor agent and several ISP agents.
Each ISP agent has the possibility to use resources.
Fig. 1. Structure of the DSS.
2.1 Multi agent Structure of Hybrid Piloting
We consider a production system made up of several Integrated Stations of Produc-
tion ISP. They are called agents ISP. Each agent (ISP) is specialized in the operations
of production; it is of a cognitive type.
Supervisor Agent
ISP
ISP
ISP
R
R
R
R
R
R: resource
Fig. 2. Modelling of the distributed and supervised piloting structure by the multi agent model.
It has sufficient knowledge to make decisions. Its role is then:
a. To manage locally in real time the processes of allocation of tasks, queues, etc
b. To manage the availability of the necessary elements to the realization of operat-
Human Operator
Behaviours
Configuration of
resources
Data Base
Total
Information Subsystem
Inter
face
Subs
y
s
te
Communication
Subsystem
Module of
Analysis
and
Decision Subsystem
Control Subsystem
Expert Interface
57
ing tasks. The system then consists of a set of co-operative agents under the control of
a supervisor (Figure1). This structure has been used in many projects and its effec-
tiveness has been showed [8] [12].
Subs
y
stem of
Subsystem of
communication
Subsystem of
information
Analysis and
reaction
module
Behaviou
Subsystem of
Interface
Human
Operator
Subsystem of
control
Fig. 3. Architecture of ISP Agent.
2.2 The Agent Structure (ISP)
An agent is composed of five subsystems [11] (as shown in Figure3.):
• Information subsystem: allows ensuring communication between the subsystems
and managing local information.
• Communication subsystem: ensures the connection between the ISP and the other
agents, the production system components.
• Interface subsystem: allows the information exchange between the human opera-
tor and the agent.
• Control/Order subsystem: ensures the order of production resources and transmits
the follow-up information to the information subsystem.
• Decision subsystem: is responsible of the set of decisions made during the prob-
lem realization process.
The decomposition into subsystems has been adopted, but in order to test several
multicriteria decision-making processes, the decision subsystem has undergone some
modifications which consist in adding [11]:
a) A module of analysis and reaction in order to take into account the state of
workshop at any moment.
b) A set of behaviours associated with each ISP.
3 Description of the Production System
3.1 State of the Workshop
The reactive stage of the proposed approach corresponds to the implementation of
group scheduling. It is treated by an interactive decision support system. The latter
works in the following way:
Piloted System
piloté
58

- The state of workshop, defined by the states of resources and operations is regu-
larly updated.
- State changes are due to the occurrence of events or to decision making.
- The decision making is guided by information provided by DSS and is based on
communication between the entity supervisor and agents ISP.
The support decision proposed consists in the basis of indicators to assess the pos-
sible choices regarding admissibility; that is, to meet the deadline.
3.2 States of Resources
- Free (FR): if it is useful and if no operation is appointed to it.
- Active (AC): when it carries out an operation.
- Failure (FA): if it cannot work due to an incident.
- Non active (NAC): The operation is stopped due to a blockage in the order of
manufacture. The resource remains appointed to the current operation.
3.3 States of Operations
During its execution, an operation could be in one of the following states:
- White (WH): When at least a previous operation in the sense of the range is not
in the current state.
- In approach (AP): when all the operations in the sense of the range are passed in
the current state.
- In transport (TP): when all the previous operations in the sense of the range are
ended and the operation discussed is in transport on its way to place of execution.
- Available (AV): Once the transport is ended, the operation is ready to be carried
out.
- Current (EC): the operation is under execution on a resource.
- Stopped (ST): The execution is stopped because the resource which carried it out
was subject to a breakdown on one or many of its lines of load.
- Blocked (BK): an operation passes to the blocked state due to the occurrence of
an incident linked to the order of manufacture or anything else.
- Finished (FH): When the execution of operation is ended.
3.4 Events
Events correspond to situations determined in the workshop supported by its manu-
facture monitoring system, causing changes of states, they can list:
- At the End of execution of an operation (FE):
Once the operation is ended, the resource which carried it out becomes free. The
following operation in the range passes the transport state.
- At the End of transport of an operation (ETp): The operation is ready to be car-
ried out.
- Breakdown (B) of a resource: The statement of breakdown is accompanied by
the name of resource and stopped operation.
- At the End of Breakdown (EB): After the end of breakdown, the resource can
carry out a planned operation.
59

- Blockage of an operation: The blockage of an operation covers all the problems
related to the operation which prevent its execution.
- At the End of blockage: The operation will be ready to be carried out after this
event.
Events can be classified into two categories according to their mode of occurrence:
1. The expected events, of which the occurrence is obligatory as soon as the work-
shop is in a certain state.
2. The unexpected events, corresponding to disturbances which appear during pro-
duction.
3.5 Decisions
Increasing the total reactivity of the decision structures in production control requires
to give a greater autonomy to the actors. It also poses the problem of total coherence:
this autonomy can put in danger. Regulations are necessary so that each decision
maker can ensure at the same time the treatment of disturbances which fall on to it
and meet the coherence of its decisions. Those pass by negotiations which can inter-
vene especially in reaction to the impossibility of carrying out decisions which are
already made. This is by taking into account the extent of the disturbances to be ab-
sorbed [2], [4].
Decisions aim to organize the use of resource to carry out the operations according
to delays defined by the plan of production.
Every decision therefore concerns the relation between an operation and the re-
source used for its execution, we distinguish:
- Decision of type E: to couple an operation with a resource to undertake its execu-
tion.
- Decision of type R: to take back the execution of an operation on a loading line
after its repairing (breakdown).
- Decision of type I: Liberate the resource due to the break of execution of operation.
- Decision of type C: to change the allocation of an operation.
A decision –making centre can consist of a single resource or a set of grouped re-
sources under the same decision maker. The messages sent of a decision making
centre toward the DSS are filtered by the entity supervisor and are treated according
to their priority. This is by starting from a queue managed by the supervisor. Once the
requests treated by DSS, the supervisor establishes (figure 4) the correspondence
between entities ISP in difficulty and transmits to this entity the response to its re-
quest.
4 Principle of Negotiation between the Agents ISP
4.1 Introduction
We outline in this part the specifications at the level of every ISP and the addition of
a supervision level.
60

The system is composed of a set of cooperative ISP under control of a supervisor.
We detect two types of cooperation [12]:
1. between the operator and the agent: The human operator is responsible for local
decisions. This type of cooperation is specified to study the influence on the auto-
adaptation and on the integration of objectives of production of a possible integration
via an interactive multicriterion decision making system.
2. Which represents the interaction between agents? It is at this level that the struc-
ture of robust communication interferes. The integration of a resistance to dysfunc-
tions obliges to spread the protocol of allocation of tasks to insert a minimum level of
robustness.
Six primitives have been developed to describe generically the steps of any com-
munication protocol. We outline here their use.
The sequence of different actions leading to a contract of data exchange (service)
between a transmitter (applicant of service) and a receiver is represented by the first
five primitives. In case where, following the approval of exchange contract, transmit-
ted data are not sufficient, the transfer primitive can be called.
We outline them below:
REQUEST
: a request is issued when it is necessary to acquire a service from the
resource called.
ACCEPTANCE
: an acceptance stipulates a potential agreement of service. The
receiver can or not receive a request of effective service (activated service but not
active).
RESERVATION
: a reservation corresponds to service exclusive. The latter is then
active.
RELAXATION
: a relaxation corresponds to the cancellation of request.
LIBERATION
: a liberation is sent to end a service.
To these five primitives we link a sixth particular one:
TRANSFER
: this primitive is used to assure the transit of any information inde-
pendently of the five primitive above. It is used when a service is active (a reserva-
tion has been sent) or is activated (an acceptance has been received), or even in a
completely asynchronous way (case where the transmitter does not check the con-
nection). It can be also linked to a message of physical transfer of the room.
4.2 General Description
Stage 1: When an operation on a product has just been performed by an agent, the
latter checks if there remains an operation to be accomplished on this product (or lot
of products). If yes, a request is sent to the entire linked ISP.
Stage 2: The ISP able of executing the operation goes back to ISP which sent the
request an acceptance as well as a data set on its own characteristics (state of queue,
etc). They turn then into a state of waiting of reservation / relaxation. An ISP which
accepts a message of the type request checks the concordance between the constraints
imposed by the operation and its own possibilities. This concordance is developed for
instance in term of compatibility "type of realisable operation by the system of pro-
duction linked to ISP "versus" type of operation requested for the task to be realised".
61

Stage 3: The sender ISP chooses the best adapted ISP and sends it a reservation. It
informs the other ISP of their non-selection by sending them a relaxation. The sender
ISP turns then into the state of waiting of liberation.
The set of ISP candidates is assessed an algorithm able to consider the classical
rules of allocation. The objective function can then be defined according to the total
objectives of production.
Stage 4: The ISP chosen sends back to the sender ISP a message of the end of com-
munication (liberation) to inform it about the reception of reservation and is in the
state of waiting of transfer. The transfer of product and the order of manufacture
between the two ISP can take place.
4.3 The Supervisor Agent
The Module of Analysis and Reaction
This module performs a continuous analysis of messages which the agent supervisor
accepts, across its interface of communication. And, it activates the behaviours which
correspond to them. It also updates the states of operations in the total agenda due to
the messages sent by the agents ISP.
The Behaviours
The entity supervisor has a set of behaviours to fulfil its task:
• The behaviour CPA: aims at searching for the resource satisfying best the objec-
tives to be attained for production.
• The behaviour CPR: attempts to search for the agent (the best) of substitution for
an operation of re-affectation (in case of failure of a local re-affectation).
The Total Agenda
This agenda allows the supervisor to represent and follow the evolution of all the
tasks in the system. This agenda also allows reconstructing information of any local
agenda in an ISP.
The Interface of Communication
This module manages the messages in transit between the agent supervisor and all the
other agents of the system.
The Real Time Clock
It generates the time.
4.4 The ISP Agent
The Module of Analysis and Reaction
It constantly analyses the messages received by the ISP agent, across its interface of
communication, and activates the behaviours corresponding to the events received.
So, the state of operations is updated.
The Behaviours
• The behaviour CPF: aims at managing the queue of the ISP Agent and chooses
the next operation to be carried out.
62

• The behaviour CPS: corresponds to the process of allocation and aims for the
research of the next ISP (the best) to treat the following operation of current pro-
duction.
• The behaviour CPR: allows searching for a machine of substitution among those
that it controls (the best) for operating re-affectation due to a breakdown.
The Local Agenda
The agenda, a form of representation of engagements of any ISP, obeys the following
rules:
• At each beginning of execution of an operation, the ISP agent registers in its
agenda the beginning of this operation which it signals to the supervisor.
• At each end of an operation, the ISP agent registers in its agenda the end of this
operation which it signals to the supervisor.
Interface Expert
Allows to the human operator to consult and modify the configuration of ISP
agent, to know the present state of resources and to follow the evolution of activity of
production.
The Interface of Communication
This module allows the management of messages in transit between ISP agent and
the other entities of the system.
The Real Time Clock
It generates the real time factor in the ISP agent.
5 A Case Study
The conversations are built by the agents and are controlled by the entity supervisor:
for example, when Checking the coherence of a decision of ISP agent1 by an ISP
agent2 that should start the adequate behaviour. The ISP agent1 communicates infor-
mation to ISP agent2 (arcs 0 and 1on Figure 5). The ISP agent 2 evaluates if the addi-
tion of this information is possible or not (arcs 3, 3') and transmits the result to ISP
agent1 (arc4). The procedure succeeds if ISP1 answers favourably in time (arc5). It
fails if not (arcs5 and 5'). The ISP agent 2 starts the procedure of analysis and reac-
tion.
5.1 Breakdown of a Resource
1. The resource n°1 controlled by agent 3 is in the state breakdown. The module of
analysis and reaction discerns this event and triggers off the behaviour connected;
that is CPR, if the process fails ISP agent n°3 re-redirect the request of re-affectation
to the agent supervisor. This triggers off behaviour CPR at the supervisor level.
2. The agent supervisor transmits the request towards other agents ISP (ISP 1, ISP 2)
and treats the received answers accepted to choose the best machine of substitution.
3. The result will be announced to the ISP agent chosen as well as the ISP agent ap-
plicant.
We consider a structure of piloting made up of a supervisory agent and of 4-5
agents ISP. Let us suppose the arrival of a work order made up of several spots T1-
63
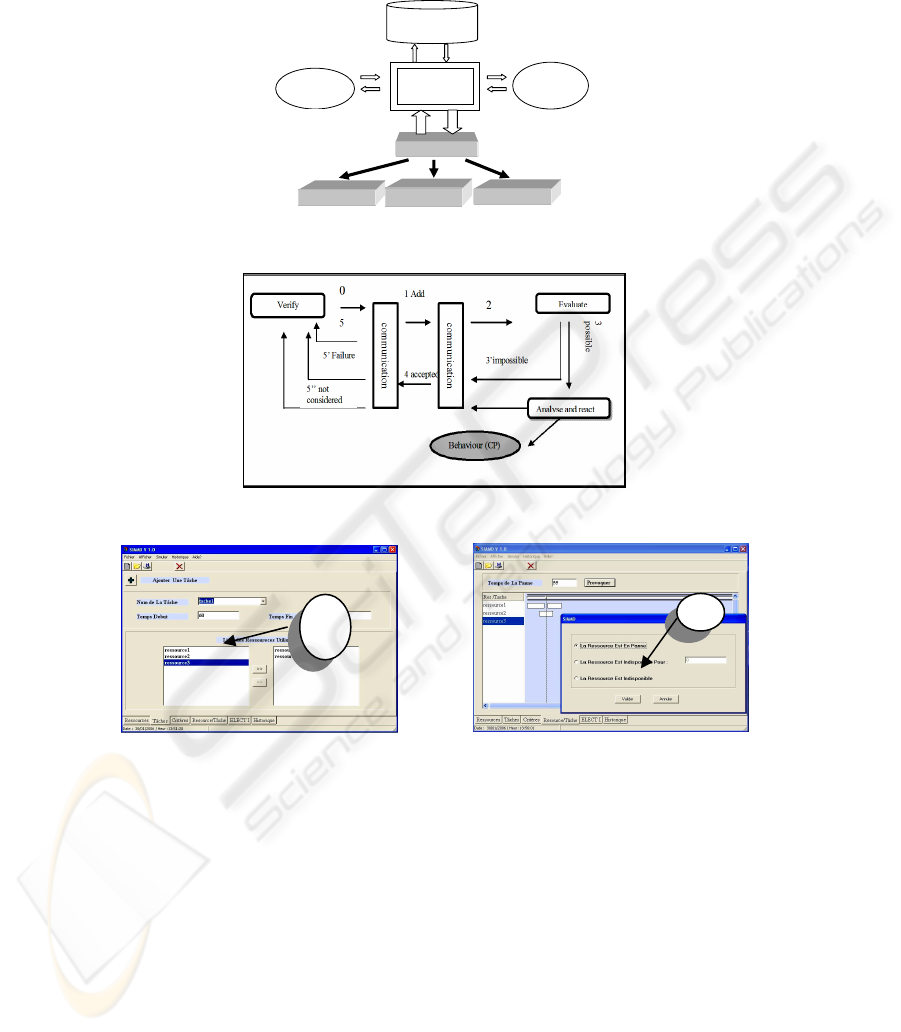
T7. In Figure 7, we can see a view of the simulation tool on tag1, the simulator tool
permits to animate the task model in concordance with the user interface as presented
in Figure 6 (tag2).
Decision
Support System
Current set of
Scheduling
Current State of
workshop
Supervisor Entity
Decision Centre 1
Decision Centre 2
Decision Centre n
Set of acceptable
Scheduling
Sending of information
and proposals
Consideration of events
and decisions
Fig. 4. Decision support system Functioning.
Fig. 5. SIP1 checks the coherence of its decision.
Fig. 6. Declaration of tasks. Fig. 7. Execution of simulation
6 Conclusion
The decision support approach allows, on the basis of deterministic model, to organ-
ize in real time the execution of tasks according to the real state of making workshop
and thus to take into account the unexpected situations. We have proposed in this
article a model of piloting which is based on a supervised distributed structure. The
multi agent system allows, by defining a set of states, events and decisions and in-
stalling of behaviours associated with the decision support processes of real time
2
1
64

scheduling of workshop, to bring a decision support and a help to the negotiation
between entities ISP and the entity supervisor. This modelling is centred on a module
of analysis and of reaction. The latter provides the function of identification of situa-
tions and starts the adequate behaviours. For the future, the research will be extended
according to three important directions. Firstly, given that robustness of a scheduling
characterizes its performance [1], we would like to extend the decision support given
by this approach to treat uncertainty. Secondly, in the case where the number of risks
is important, the feasibility of a method cannot be guaranteed [6], it will be necessary
to ensure flexibility by setting up a mechanism of choice in the group of acceptable
scheduling and ensure feasibility for the greatest number of possible scenarios of
execution. Finally, we intend to integrate the human operator in the decision support,
several co-operation modes have been defined with the decision support system. This
integration will be done by the use of a method of multicriterion assistance such as
AHP [12].
References
1. Billaut, J-C., Moukrim, A., 2005. Introduction à la flexibilité et à la robustesse en ordon-
nancement in Flexibilité et robustesse en ordonnancement (Billaut). Lavoisier Hermes
sciences publications. Paris.
2. Camalot, J-P., Esquirol, P., 1997. Aide à la décision et à la négociation dans un problème
de gestion de production distribuée in Deuxième congrès international franco-québécois de
Génie industriel- ALBI.
3. Chen, Y.-M., Wang, S.-C. 2005. Framework of agent-based intelligence system with two
stage decision making process for distributed dynamic scheduling in Applied Soft Comput-
ing 229-245
4. Huguet, M-J., Erschler, J., 1996. Negotiation based on constraints in cooperation. In Com-
puter supported cooperative work.
5. Jianxin, J., Xiao, Y., 2005. An agent-based framework for collaborative negotiation in the
global manufacturing supply chain network in Robotics and Computer-Integrated Manufac-
turing 22. 239-255. Elsevier.
6. Pomerol, J-C., 2006. La décision humaine : reconnaissance plus raisonnement in Concepts
et méthodes pour l’aide à la décision (Bouyssou, D.), Hermes sciences publications. Paris.
7. Reaidy, J., Massotte, P., Diep, D., 2005.Comparison of negotiation protocols in dynamic
agent-based manufacturing systems. In International Journal of Production economics. 117-
130.
8. Rouba, B., Taghezout, N., 2004. Un processus décisionnel multicritère basé sur l’approche
multi agent pour le contrôle de SAP. In MOAD’04.
9. Shen, W., Yoon, H.J., Norrie, D.H., 2006. Applications of agent-based systems in intelli-
gent manufacturing: An updated review in Advanced engineering INFORMATICS 415-431
10. Sousa, P., Ramos, C., 1999. A distributed architecture and negotiation protocol for schedul-
ing in manufacturing systems in Computers in Industry (38) 103-113
11. Taghezout, N., Beldjilali, B., 2006. Prise en Compte des Préférences de l’Opérateur Hu-
main dans un Processus Décisionnel Multicritère Basé sur AHP : Application à un système
de production. In MCSEAI’06. Maghrebian Conférence on information technologies.
12. Taghezout, N., 2006. Expérimentation et Intégration de la méthode Electre I dans système
d’aide à la décision appliqué aux SAP. In SNIB’06, 5eme Séminaire National en informati-
que de Biskra, Vol.1, pp 196-206.
13. Yan, Y., Kuphal, T., Bode, J., 2000. Application of multiagent systems in project manage-
ment in International Journal of Production economics (68) 185-197
65
