
Improving Isometric Hand Gesture Identification for
HCI based on Independent Component Analysis in
Bio-signal Processing
Ganesh R. Naik
1, 2
, Dinesh K. Kumar
1
, Hans Weghorn
2
, Vijay P. Singh
1
and Marimuthu Palaniswami
3
1
School of Electrical and Computer Engineering, Royal Melbourne Institute of Technology
University, GPO BOX 2476V, Melbourne, Victoria-3001, Australia
2
BA-University of Cooperative Education, PO BOX 10 05 63, 70004, Stuttgart, Germany
3
Department of Electrical and Electronic Engineering, The University of Melbourne
Parkville, Victoria-3010, Australia
Abstract. Hand gesture identification has various human computer interaction
(HCI) applications. There is an urgent need for establishing a simple yet robust
system that can be used to identify subtle complex hand actions and gestures
for control of prosthesis and other computer assisted devices. Here, an approach
is explained to demonstrate how hand gestures can be identified from isometric
muscular activity, where signal level is low and changes are very subtle. Obvi-
ous difficulties arise from a very poor signal to noise ratio in the recorded elec-
tromyograms (EMG). Independent component analysis (ICA) is applied to
separate these low-level muscle activities. The order and magnitude ambiguity
of ICA have been overcome by using a priori knowledge of the hand muscle
anatomy and a fixed un-mixing matrix. The classification is achieved using a
back-propagation neural network. Experimental results are shown, where the
system was able to reliably recognize motionless gestures. The system was
tested across users to investigate the impact of inter-subject variation. The ex-
perimental results demonstrate an overall accuracy of 96%, and the system was
shown being insensitive against electrode positions, since these successful ex-
periments were repeated on different days. The advantage of such a system is,
that it is easy to train by a lay user, and that it can easily be implemented as
real-time processing after an initial training. Hence, EMG-based input devices
can provide an effective solution for designing mobile interfaces that are subtle
and intimate, and there exist a range of applications for communication, emo-
tive machines and human computer interface.
1 Introduction
Hand gesture identification has numerous human computer interface (HCI) applica-
tions related to controlling machines and computers. Some of the commonly em-
ployed techniques include mechanical sensors [1], vision-based systems [2] and the
R. Naik G., K. Kumar D., Weghorn H., P. Singh V. and Palaniswami M. (2007).
Improving Isometric Hand Gesture Identification for HCI based on Independent Component Analysis in Bio-signal Processing.
In Proceedings of the 7th International Workshop on Pattern Recognition in Information Systems, pages 171-180
DOI: 10.5220/0002427301710180
Copyright
c
SciTePress

use of electromyogram [3]. Electromyogram has an advantage of being easy to re-
cord, and is non-invasive. The Electromyogram is an electrical signal generated by
muscular contraction [4]. It is a result of the spatial and temporal integration of the
motor unit action potential (MUAP) originating from different motor units. It can be
recorded non-invasively using surface electrodes in different pairs, each pair consti-
tuting a channel.
In previous research, gestures are typically sensed by accelerometers [5], capaci-
tive techniques [6] or proximity sensors worn on different parts of the body [7].
These techniques require the users to noticeably move their limbs, which can be in-
convenient and socially unacceptable. On the contrary, electromyographic (EMG)
signals can convey information about isometric muscular activity: activity related to
very subtle or no movement at all. Hence it allows the definition of a class of “subtle”
or “motionless gestures” that can be used to design discreet, intimate mobile inter-
faces.
EMG is a biosignal related to muscle contraction. Studies on the use of EMG for
gesture recognition have been reported, but none of them takes explicit advantage of
its subtlety, the fact that commands can be issued without the generation of observ-
able movements.
Any hand movement is a result of a complex combination of many flexors and ex-
tensors present in the forearm. Since all these muscles present in the forearm are close
to each other, myo-electric activity observed from any muscle site comprises the
activity from the neighbouring muscles as well, referred to as cross-talk. When the
muscle activity is small (subtle), the signal strength is small and the impact of cross
talk and noise is very high. This is further exaggerated when considering different
subjects, since the size of the muscles, presence of subcutaneous fat layer and also the
training level is different for different people. Therefore this mixing of electrical
activity from different muscles to result in the surface EMG (sEMG) signal can not be
easily modelled or generalized. Extraction of the useful information from such kind
of surface EMG becomes even more difficult for low level of contraction mainly due
to the low signal – to – noise ratio. At low level of contraction, EMG activity is
hardly discernible from the background activity. Therefore to correctly classify the
movement and gesture of the hand more precisely, EMG needs to be decomposed to
identify activities of individual muscles. There is little or no prior information of the
muscle activity, and the signals have temporal and spectral overlap, making the prob-
lem suitable for blind source separation (BSS) or ICA for the separation of muscle
activities.
ICA is an iterative technique where the only model of the signals is the independ-
ence, and the distribution. The outcome of ICA is that the signals are separated with-
out there being any information about the order of the sources. While this difficulty is
generally not consequential for audio signals, this would be of concern when working
with muscle activity. The spatial location of the active muscle activity is the determin-
ing factor of the hand action and gesture. To overcome this difficulty, one approach
that has been reported is the use of prior knowledge of the muscle anatomy. The ad-
vantage of this approach is the model based approach that provides a well defined
muscle activity pattern.
In the current technology any mobile device should be as natural and conceptually
as un noticeable as possible. Hence our research extends this concept: we believe that
172

not only the devices should be unnoticeable and natural, but also the interaction with
them needs to be subtle and discreet. Therefore, we promote the idea of subtle ges-
tures (isometric hand gesture identification).
2 Hand Gesture Identification for HCI and Related Work
Computers and computerised machines have become a new element of our society.
Human-computer interaction requires the design, and implementation of interactive
computing systems for human use. The intent is to provide seamless and natural inter-
face that allows the human user to control and interact with computers and computer
based machines.
The use of hand gesture provides an attractive alternative to cumbersome interface
devices for human computer interaction applications. Human hand gestures are a
mean of non-verbal interaction among people. They range from simple actions of
pointing at objects to the more complex ones that express our feelings and communi-
cate with others. Numerous approaches have been applied to the problem of visual
interpretation of gestures for HCI. Many of those approaches have been chosen and
implemented to focus on a particular aspect of gestures: Hand tracking, pose classifi-
cation, or hand posture interpretations [2].
A number of approaches based on hand gesture identification have been proposed
for human computer interaction. Wheeler et al. demonstrated that neuroelectric joy
sticks and keyboards can be used for HCI [8]. Trejo et al [9] developed a technique
for multi modal neuroelctric interface. The most recent work includes the investiga-
tion of eleven normally limbed subjects (eight males and four females) for six distinct
limb motions: wrist flexion, wrist extension, supination, pronation, hand open, and
hand close. Each subject underwent four 60-seconds sessions, producing continuous
contractions [10]. Recent studies focus on the use of EMG for the recognition of an
alphabet of discrete gestures. Fistre and Tanaka [11] propose a system that can recog-
nize six different hand gestures using two EMG channels on the forearm. The device
is designed to control consumer electronics and is described as portable.
Wheeler and Jorgensen [8] report the development and successful testing of a neu-
roelectric joystick and a neuroelectric keypad. By using EMG signals collected from
four and eight channels on the forearm they successfully recognise the movement
corresponding to the use of a virtual joystick and virtual numeric keypad. Gestures
mimicking the use of physical devices are successfully recognised using hidden
Markov models.
To improve the reliability, a number of efficient solutions to gesture input in HCI
exist such as:
• Restrict the recognition situation.
• Use of input devices (e.g. data glove).
• Restrict the object information.
• Restrict the set of gestures.
In traditional HCI, most attempts have used some external mechanical device such
as an instrumented glove. If the goal is natural interaction in everyday situations this
might not be acceptable. Vision based approach to hand-centered HCI has been pro-
173

posed in recent years. However vision based techniques require restricted back-
grounds and camera positions and are suitable for a small set of gestures performed
with only one hand [1]. In this report we propose the identification of maintained
hand gesture based on the muscle activity using the decomposition of surface EMG. It
is a combination of model based approach with blind source separation
3 Foundation of Semg Bio-signal Processing
Surface EMG (sEMG) is a result of the superposition of a large number of transients
(muscle action potentials) that have temporal and spatial separation that is pseudo-
random. The origin of each of the MUAP is inherently random and the electrical
characteristics of the surrounding tissues are non-linear. Due to the nature of this
signal the amplitude of the EMG signal is pseudo-random and the shape of the prob-
ability distribution function resembles a Gaussian function.
sEMG is a non-invasive recording, requires relatively simple equipment, and this
opens it for numerous applications. The close relationship of surface EMG with the
force of contraction of the muscle is useful for number of applications such as sports
training and for machine control. The relationship of surface EMG spectrum with
muscle fatigue is also very useful for occupational health and sports training.
One property of the surface EMG is that the signal originating from one muscle
can generally be considered to be independent of other bioelectric signals such as
electrocardiogram (ECG), electro-oculargram (EOG), and signals from neighbouring
muscles. This opens an opportunity of the use of independent component analysis
(ICA) for this application.
3.1 Independent Component Analysis
Independent component analysis one of the Blind source separation (BSS) technique,
aims at recovering the sources from a set of observations. Applications include sepa-
rating individual voices in cocktail party. In BSS problem, it contains two processes.
They are the mixing process and un-mixing process. First, we observe a set of multi-
variate signals x = [x
1
(t), x
2
(t),…,x
n
(t)]
T
that are assumed to be linearly mixed with a
set of source signals s = [s
1
(t), s
2
(t),…, s
n
(t)] The mixing process is hidden so we can
only observe the mixed signals. The task is to recover the original source signals from
the observations through a un-mixing process. Equation 1 and 2 describe the mixing
and un-mixing processes mathematically.
Mixing x = As (1)
Un-mixing Wx = WAs (2)
For solving the BSS it is assumed that the number of observations is equal to the
number of source signals. Matrix s contains the original source signals driving the
observations, whereas the separated signals are stored in matrix u. They are both
[n×t] matrices. A and W are both [n×n] matrices, called mixing and un-mixing matrix
174

respectively. If the separated signals are the same as the original sources, the mixing
matrix is the inverse of the un-mixing matrix, i.e. A = W
-1
ICA is an iterative method that is able to separate independent sources from the
mixture [12]. ICA estimates the mixing matrix W using ‘independence’ based cost
function. Various ICA algorithms have been proposed. Most of them use higher order
statistics to obtain the independent components [12].
3.2 Relevance of ICA for Surface EMG Signal Evaluation
The goal of this section is to demonstrate that there is a strong theoretical basis for
applying ICA to sEMG. The assumptions that underpin the theory of instantaneous
ICA, indicate that ICA is ideally suited to separating sources when
• The sources are statistically independent
• Independent components have non-Gaussian distribution
• The mixing matrix is invertible.
These assumptions are well satisfied by sEMG data as MUAPs are statistically in-
dependent, have non-Gaussian distributions and we can be (virtually) certain that the
mixing matrix will be invertible. There are, however, two other practical issues that
must be considered. Firstly, to ensure that the mixing matrix is constant the sources
must be fixed in space (this is an implied assumption as only the case of a constant
mixing matrix is considered). This is satisfied by sEMG as motor units are in fixed
physical locations within a muscle, and in this sense applying ICA to sEMG is much
simpler than in other biomedical signal processing applications such as EEG or fMRI
in which the sources can move [13]. Secondly, in order to use ICA it is essential to
assume that signal propagation time is negligible. Volume conduction in tissue is
essentially instantaneous [14]. Hence this assumption is also well satisfied.
Based on the above discussion of the ICA assumptions as they apply to sEMG, it is
reasonable to be confident that ICA can be effectively applied to EMG data. The
validity of using ICA on sEMG is examined later in the experimental and analysis
section.
4 Methodology
4.1 Experimental Procedure
University ethics committee granted approval to conduct experiments on human sub-
jects and acquire Surface EMG using surface electrodes. For the hand gesture ex-
periments four subjects whose ages ranging from 21 to 32 years (three males and one
female) were chosen. For the data acquisition a proprietary Surface EMG acquisition
system by Delsys (Boston, MA, USA) was used. Four electrode channels were placed
over four different muscles as indicated in the Table 1 and Fig. 1. A reference elec-
trode was placed at Epicondylus Medialis.
175

Table 1: Muscle Electrode Configuration.
Channel Muscle Function
1 Brachioradialis Flexion of forearm
2 Flexor Carpi radialis (FCR) Abduction and flexion of wrist
3 Flexor Carpi Ulnaris (FCU) Adduction and flexion of wrist
4 Flexor digitorum superficialis (FDS) Finger flexion while avoiding wrist flexion
Fig. 2. Hand gesture experimental set up with four electrodes.
Each channel is a set of two differential electrodes with a fixed inter-electrode dis-
tance of 10mm and a gain of 1000. Before placing the electrodes subject's skin was
prepared by lightly abrading with skin exfoliate to remove dead skin that helps in
reducing the skin impedance to less than 60 kilo Ohm. Skin was also cleaned with
70% v/v alcohol swab to remove any oil or dust on the skin surface.
ICA is suitable when the numbers of recordings are same as or greater than the num-
ber of sources. This paper reports using 4 channels of EMG recorded during hand
actions that required not greater than 4 independent muscles. This ensures that the un-
mixing matrix is a square matrix of size of 4×4. The experiments were repeated on
two different days. Subjects were asked to keep the forearm resting on the table with
elbow at an angle of 90 degree in a comfortable position. Four isometric hand actions
were performed and repeated 12 to 14 times at each instance. Each time raw signal
sampled at 1024 samples/second was recorded. Markers were used to obtain the Iso-
metric contraction signals during recording. A suitable resting time was given be-
tween each experiment. There was no external load. The actions were complex to
determine the ability of the system when similar muscles were active simultaneously.
The four different hand actions were performed and are listed below:
• Middle and index finger flexion.
• Little and ring finger flexion
• All finger flexion
• Finger & wrist flexion together.
These hand actions were selected based on small variations between the muscle ac-
tivities of the different digitas muscles situated in the forearm.
4.2 Data Analysis
The aim of this experiment was to test the use of ICA along with known properties of
the muscles for separation of sEMG signals for the purpose of identifying stationary
hand gestures and finger movement actions. Each action was repeated 12 to 14 times
176
and each contraction lasted approximately 2.5 seconds. The sampling rate was 1024
samples per second, and this gives approximately 2500 samples during the contrac-
tion. There were four channel (recordings) electrodes over the four active muscles
associated with the different hand gestures, forming a square 4×4 mixing matrix. The
sEMG recordings were then separated using fast ICA algorithm which is developed
by the team at the Helsinki University of Technology [15]. The mixing matrix A was
computed for the first set of data only and kept constant throughout the experiment.
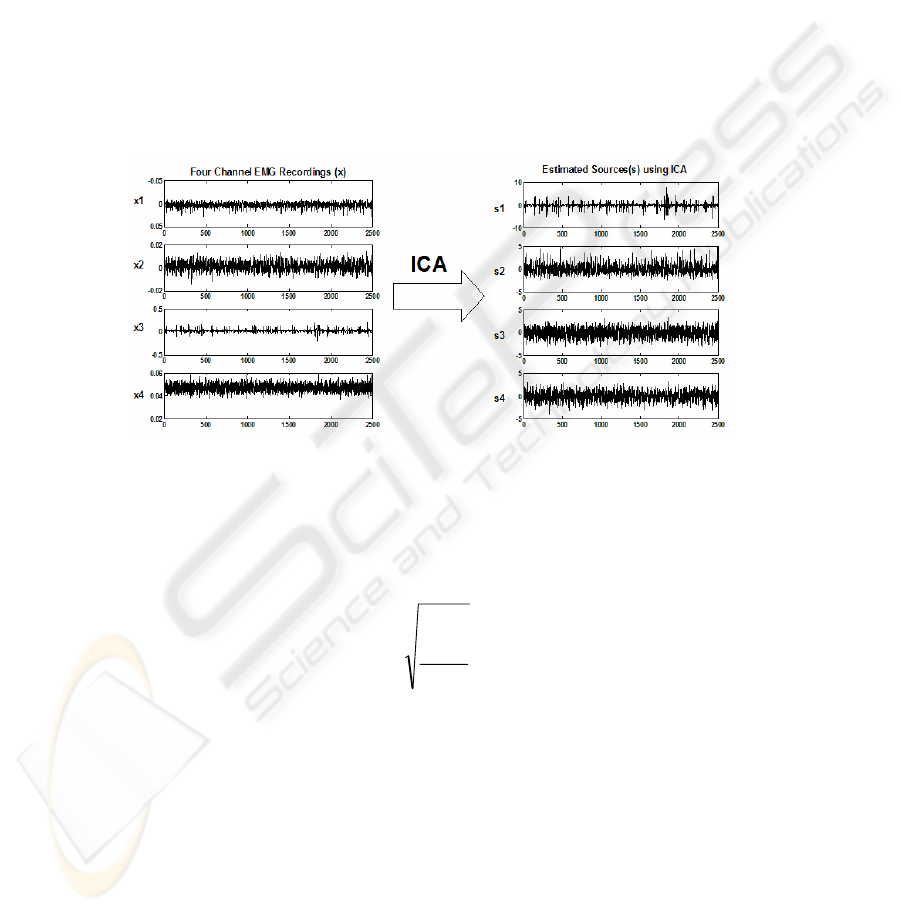
The independent sources of motor unit action potentials that mix to make the EMG
recordings were computed using the following equation:
s = Bx (3)
where B is the inverse of the mixing matrix A. This process was repeated for each of
the hand gestures. Four sources were estimated for each experiment. The example of
four channel source separation using Fast ICA matlab package is depicted in Fig. 3.
Fig. 3. Estimated four channel source signals s(t) from a four channel recording x(t)-1024
sampling rate using fast ICA.
After separating the four sources sa, sb, sc and sd, each of these was segmented to
2500 samples length. Root Mean Squares (RMS) was computed for each separated
sources using the following relation:
N
s
Srms
n
i
i
∑
=
=
1
2
(4)
where s is the source and N is the number of samples (N = 2500). This results in one
number representing the muscle activity for each channel for each hand action.
RMS value of muscle activity of each source represents the muscle activity of that
muscle and is indicative of the force of contraction generated by each muscle. Taking
a ratio of these activities gives a relative combination of the activity from each of
these muscles and has been used to identify the hand gesture. A constant mixing ma-
trix A and set of weight matrix for neural networks were used for each subject making
the system configured for each individual.
177
The above process was repeated for all four different hand actions 12 to 14 times
and for each of the participants. These 12 to 14 sets of examples were used to train a
back-propagation neural network with 4 inputs and 3 outputs. The 4 RMS (Root
Mean Square) values of the muscles were the input and the 3 RMS (Root Mean
Square) values were the output. In the first part of the experiment, RMS values of
recordings for each subject were used to train the ANN classifier with back-
propagation learning algorithm. The second part of the experiment (testing) was to
verify the training results. For that the set of data’s which were not used for the train-
ing purpose (an independent data set) was selected. During the training, ANN con-
sisted of two hidden layers with a total of 20 nodes and a sigmoid function as thresh-
old function. The gradient descent algorithm with a learning rate of 0.05 was used to
avoid any chances of local minima. During testing, the ANN with weight matrix
generated during training, was used to classify RMS of the muscle activity separated
using un-mixing matrix generated during training. The ability of the network to cor-
rectly classify the inputs against known hand actions were used to determine the effi-
cacy of the technique.
4.3 Results and Observations
The results of the experiment demonstrate the performance of the above described
system. The results of testing the back propagation ANN to correctly classify the test
data based on the weight matrix generated using the training data is tabulated in Table
2. The accuracy was computed based on the percentage of correct classified data
points to the total number of data points. These results indicate an over all classifica-
tion accuracy of 96% for all the experiments. The results demonstrate that this tech-
nique can be used for the classification of different types of isometric muscular activ-
ity. This feature makes it possible to define a class of subtle motionless gestures to
control an interface without being noticed and without disrupting the surrounding
environment.
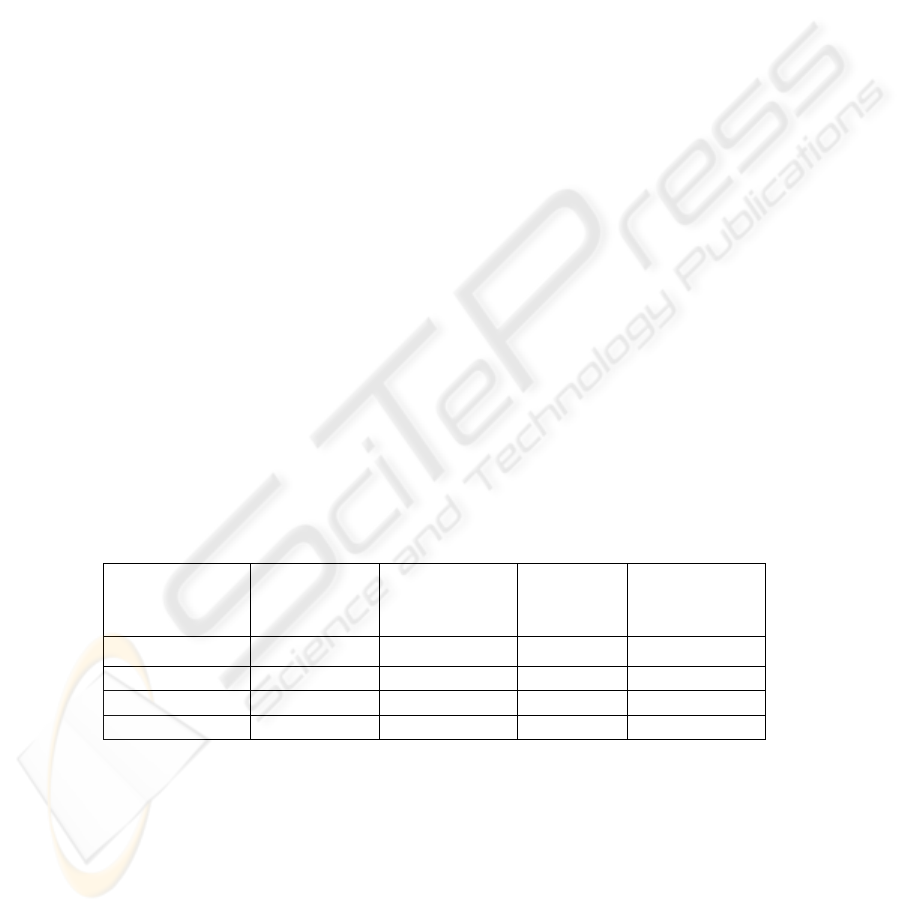
Table 2. Experimental results for Isometric Hand Gesture Identification.
Number of
participants
Middle and
index finger
flexion
Little and ring
finger flexion
All finger
flexion
Finger and
wrist flexion
together
Subject 1 97% 96% 97% 96%
Subject 2 96% 96% 96% 96%
Subject 3 97% 96% 96% 96%
Subject 4 97% 97% 96% 97%
5 Discussion
The proposed technique is capable of classifying small levels of muscle activity to
identify Isometric hand gesture. Its base is using a combination of independent com-
178

ponent analysis (ICA), known muscle anatomy and neural network configured for the
individual. The results indicate the ability of the system to perfectly recognize the
hand gesture even though the muscle activity is very low and there are number of
active muscles for each of the gestures.
There exist numerous papers in literature, which have attempted to identify hand
and body gestures from sEMG recordings, but all come with low reliability, perhaps
due to low signal to noise ratio and large cross-talk between different simultaneously
active muscles. In the recent past, ICA has been applied to separate the muscle activ-
ity and to reduce noise to overcome this difficulty, but the order and magnitude ambi-
guity makes the technique unreliable.
This research overcomes these issues by using a priori knowledge of the anatomy
of muscles in combination with blind source separation technique. Using a combina-
tion of the model, and ICA approaches with a neural network configured for the indi-
vidual overcomes the order and magnitude ambiguity.
6 Conclusions and Future Work
This investigation has shown that a combination of a known biological model used in
a semi-blind ICA combined with neural networks for classification can effectively be
employed to detect small muscle activities, and by that to identify subtle hand actions
and gestures. The presented experimental methods are able to reliably recognize a
motionless gesture for different muscle volumes.
A new approach that combines semi-blind ICA and a back-propagation neural
network was used to separate and identify subtle hand gestures, and subsequently
using the combination of the mixing matrix and network weights to classify the
sEMG recordings in almost real-time.
The results demonstrate that the technique can be effectively used to identify hand
gestures based on surface EMG when the level of activity is very small. The gestures
have been chosen, because each of these represents a complex combination of muscle
activations and can be extrapolated for a larger number of gestures. Nevertheless, it is
important to test the technique for more actions and gestures, and for a large group of
people. In parallel, there is ongoing work to investigate recognition of gestures on a
larger number of people and for a greater variety of hand actions to increase the per-
formance of the system.
We are working on expanding the EMG gesture for extended levels of control.
While further work on the signal processing may make it possible to recognize multi-
ple subtle gestures from a single muscle, it appears more practical to define a more
extended interface using different controllers on various muscles (e.g. on both arms).
Future work also shall include conducting experiments on inter-day and intra-day
variations to verify the stability of the system and also to develop a portable model
for hand gesture recognition using semi-blind ICA technique.
Overall, the purpose of this project is to develop new perceptual interfaces for
human computer interaction based on hand gesture identification, and to investigate
how such interfaces can complement or replace traditional interfaces based on key-
boards, mice, remote controls, data gloves and speech. Application fields for hand
gestures analysis include control of consumer electronics, interaction with visualiza-
tion systems, control of mechanical systems, and computer games.
179

One important benefit of such an HCI approach is that visual information makes it
possible to communicate with computerized equipment at a distance, without a need
for physical contact to the controlled target. Compared to speech commands, hand
gestures are especially advantageous in noisy environments –particularly in situations
where speech commands would be disturbed – as well as for communicating quantita-
tive information and spatial relationships. Furthermore, the human user shall be en-
abled to control electronic systems in a quite natural manner, without requiring spe-
cialized external equipment.
References
1. Pavlovic, V. I., Sharma, R., Huang, T. S.: Visual interpretation of hand gestures for human
computer interaction, Vol. 19. IEEE Transactions on Pattern Analysis and Machine Intelli-
gence (1997) 677 – 695
2. Rehg, J. M., Kanade, T.: Vision-based hand tracking for human-computer interaction,
IEEE, Workshop on Motion of Non-Rigid and Articulated Objects (1994) 16 - 22
3. Koike, Y., Kawato, M.: Human Interface Using Surface Electromyography Signals, Vol.
79. Electronics and Communications, Japan (1996) 15 – 22
4. Luca, C. J. D.: Physiology and mathematics of myoelectric signals. Vol. 266. IEEE Trans-
actions on Biomedical Engineering (1979)
5. Oakley, I., Angesleva, J., Hughes, S., O'Modhrain, S.: Tilt and Feel: Scrolling with Vibro-
tactile Display, The EuroHaptics (2004)
6. Rekimoto, J.: Gesture Wrist and Gesture Pad: Unobtrusive Wearable Interaction Devices,
Fifth IEEE International Symposium on Wearable Computers (2001)
7. Headon, R., Coulouris, G.: Supporting Gestural Input for Users on the Move, IEE Eu-
rowearable (2003) 107-112
8. Wheeler, K. R., Jorgensen, C. C.: Gestures as input: Neuroelectric joysticks and keyboards.
Vol. 2. IEEE Pervasive Computing (2003) 56–61
9. Trejo, L. J., Wheeler, K. R., Jorgensen, C. C., Rosipal, R., Clanton, T. S., Matthews, B.,
Hibbs, A. D., Matthews, R., Krupka, M.: Multimodal neuroelectric interface development,
Vol. 11. IEEE Transactions on Neural Systems and Rehabilitation Eng. (2003) 199– 204
10. Chan, A. D. C., Englehart, K. B.: Continuous myoelectric control for powered prostheses
using hidden markov models, Vol. 52. IEEE Transactions on Biomedical Engineering
(2005) 121–124
11. Fistre, J., Tanaka, A.: Real time EMG gesture recognition for consumer electronics device
control, Presented at Sony CSL Paris Open House, http://www.csl.sony.fr/ atau/gesture/
(2002)
12. Hyvarinen, A., Karhunen, J., Oja, E.: Independent Component Analysis, John Wiley, New
York (2001)
13. Jung, T., Makeig, S., Lee, T., McKeon, M., Brown, G., Bell, A., Sejnowski, T. : Independ-
ent component analysis of biomedical signals, Second International Workshop on Inde-
pendent Component Analysis and Blind Signal Separation (2001) 633–644
14. Makeig, S., Jung, T., Bell, A., Sejnowski, T.: Independent component analysis of electro-
encephalographic data, Vol. 8. Advances in neural information processing systems (1996)
145–151
15. Hyvarinen, A., Oja, E.: Fast fixedpoint algorithm for independent component analysis, The
Fast ICA matlab software package, http://www.cis.hut.fi/projects/ica/fastica/index.shtml
(1997)
180
