
Extending Morphological Signatures
for Visual Pattern Recognition
Sébastien Lefèvre
LSIIT, CNRS / University Louis Pasteur - Strasbourg I
Parc d’Innovation, Bvd Brant, BP 10413
67412 Illkirch Cedex, France
Abstract. Morphological signatures are powerful descriptions of the image con-
tent which are based on the framework of mathematical morphology. These sig-
natures can be computed on a global or local scale: they are called pattern spectra
(or granulometries and antigranulometries) when measured on the complete im-
ages and morphological profiles when related to single pixels. Their goal is to
measure shape distribution instead of intensity distribution, thus they can be con-
sidered as a relevant alternative to classical intensity histograms, in the context of
visual pattern recognition.
A morphological signature (either a pattern spectrum or a morphological profile)
is defined as a series of morphological operations (namely openings and closings)
considering a predefined pattern called structuring element. Even if it can be used
directly to solve various pattern recognition problems related to image data, the
simple definitions given in the binary and grayscale cases limit its usefulness in
many applications.
In this paper, we introduce several 2-D extensions to the classical 1-D morpho-
logical signature. More precisely, we elaborate morphological signatures which
try to gather more image information and do not only include a dimension related
to the object size, but also consider on a second dimension a complementary
information relative to size, intensity or spectral information. Each of the 2-D
morphological signature proposed in this paper can be defined either on a global
or local scale and for a particular kind of images among the most commonly ones
(binary, grayscale or multispectral images). We also illustrate these signatures by
several real-life applications related to object recognition and remote sensing.
1 Introduction
When applied on visual information such as digital images, pattern recognition and data
mining techniques are very dependent on the accuracy of the image features they rely
on. The image analysis and processing community has proposed from several decades
a large variety of features to represent precisely the content of an image. The features
which have received the most attention from the image scientists and engineers are
context-independent, i.e. they can be used for a various panel of problems and a wide
range of images.
Among these features, the histogram is certainly the most plebiscited and represents
the probability density function of the intensity values in the image. It can be analysed
Lefèvre S. (2007).
Extending Morphological Signatures for Visual Pattern Recognition.
In Proceedings of the 7th International Workshop on Pattern Recognition in Information Systems, pages 79-88
DOI: 10.5220/0002432700790088
Copyright
c
SciTePress

through various measures such as moments, entropy, uniformity, or other information
criteria. However it does not take into account the spatial relationships between pixels.
On the contrary, approaches such as pattern spectra, granulometries, or morpholog-
ical profiles are built from series of morphological filtering operations and thus involve
a spatial information. They can be applied either on a local scale or a global scale. In
the first case, the differential morphological profiles introduced in [1] have shown their
interest to deal with classification of remote sensing data. On a global scale, pattern
spectra and granulometries are widely known in the image analysis community [2].
However all these morphological measures are limited to a single evolution curve and
so cannot consider simultaneously several dimensions. Some attempts have been made
to generate vectorial granulometries [3] or vectorial covariances [4], but they are more
vectorial extensions than multidimensional extensions.
In this paper, we propose several extensions to build 2-D series of morphological
measures. We first give the necessary definitions and show the similarity between the
different morphological measures which have been proposed in the literature. We then
introduce three different 2-D signatures, related to size-size, size-intensity, and size-
spectrum information. The interest of our contribution is then illustrated by several
applications related to object recognition and remote sensing. We believe however that
these extensions can be used as appropriate image features to solve a larger panel of
pattern recognition and image mining problems.
2 Preliminary Definitions
Morphological signatures are tools provided by the framework of Mathematical Mor-
phology (MM) and known as pattern spectra (and granulometries / antigranulometries)
or morphological profiles when computed on a global or a local scale respectively. The
theory of MM has been introduced by Matheron and Serra [5] in the mid sixties and
has been extensively used for 40 years particulary for spatial-based image analysis. The
theoretical framework of complete lattices [6] is commonly used to elaborate morpho-
logical operators on monovalued (binary or grayscale) images. Multivalued (colour or
multispectral) images require the choice of a specific vectorial ordering [7]. In this sec-
tion, we will recall the definitions of the basic morphological operators from which we
can then give the formulation of the morphological signature.
2.1 Fundamental Operators
Let f : E → T represents the image to be morphologically processed, with E being
the discrete coordinate grid (usually N
2
for a 2-D image) while T represents the set
of possible image values. In the case of a binary image, T = {0, 1} where the objects
and the background are respectively represented by values equal to 1 and 0. In the case
of a grayscale image, T is generally a subset of Z, for instance [0, 255]. Finally, Z
n
is considered for T in case of multispectral images. Most of the available operators
within the MM framework are applied on an input image f (either binary, grayscale
or multispectral) and rely also on a predefined matching pattern B, called structuring
80

element (SE). In this paper we assume that only flat structuring elements are involved,
thus resulting in the definition of B as a subset of E.
Based on these notations, the definitions of the two basic morphological operators
(namely dilation and erosion) are given by:
δ
B
(f)(x, y) =
_
(r,s)∈B
f(x − r, y − s), (x, y) ∈ E (1)
B
(f)(x, y) =
^
(r,s)∈B
f(x + r, y + s), (x, y) ∈ E (2)
In other words, the dilation δ
B
(f) results in an image where each pixel (x, y) is associ-
ated to the local maximum of f in the neighbourhood defined by the SE B. The erosion
is the dual operator, considering the local minimum instead of the local maximum.
We can then derive the opening and closing operators:
γ
B
(f) = δ
B
(
B
(f)) (3)
φ
B
(f) =
B
(δ
B
(f)) (4)
where the two fundamental operators are applied successively to filter the input image:
erosion followed by dilation for the opening, dilation followed by erosion for the clos-
ing operator, thus resulting in a removal of either local maxima or minima. From these
definitions we can observe that the strength of an opening or closing filter depends di-
rectly on the size of the SE B: considering an increasing size λ for the SE, the openings
γ
λ
and closings φ
λ
will remove more and more details from the input image. Indeed the
opening and closing operators ensure respectively the extensivity and anti-extensivity
properties, in other words γ(f ) ⊂ f and f ⊂ φ(f). For the sake of conciseness, we
will use the operator ψ to represent either γ or φ, i.e. the opening or closing operation.
2.2 Morphological Signatures
As indicated earlier in this paper, the morphological signature can be computed either
on a local (i.e. pixel-related) or a global (i.e. image-related) scale, thus resulting in oper-
ators respectively known as morphological profile and pattern spectrum (or granulome-
try / antigranulometry). In order to give the formulation of these different operators, let
us write Π
ψ
(f) the series obtained from successive openings or closings:
Π
ψ
(f) = {Π
ψ
λ
(f) | Π
ψ
λ
(f) = ψ
λ
(f), ∀λ ∈ {0, . . . , n}} (5)
where ψ
0
(f) = f and λ denotes the size of the SE B. We assume either ψ = γ or
ψ = φ. More meaningful series ∆
ψ
(f) can be generated with differential measures:
∆
ψ
(f) =
∆
ψ
λ
(f) | ∆
ψ
λ
(f) = Π
ψ
λ
(f) − Π
ψ
λ−1
(f), ∀λ ∈ {1, . . . , n}
(6)
81

Finally we can group together opening and closing series to generate a single Π or ∆
series of length 2n:
Π(f) =
(
Π
c
(f) | Π
c
(f) =
(
Π
φ
−c
(f), ∀c ∈ {−n, . . . , −1}
Π
γ
c
(f), ∀c ∈ {1, . . . , n}
)
(7)
∆(f) =
(
∆
c
(f) | ∆
c
(f) =
(
∆
φ
−c
(f), ∀c ∈ {−n, . . . , −1}
∆
γ
c
(f), ∀c ∈ {1, . . . , n}
)
(8)
The morphological signatures widely used in image analysis and visual pattern
recognition can be defined from these different image series, either on a local or a global
scale. In the former case, the morphological profile and the well-known differential
morphological profile (DMP) are respectively defined as Π(f)(x, y) and ∆(f)(x, y)
for a given pixel (x, y) in f . In the latter case, the pattern spectrum is built from
an analysis of the image series Π(f) gathering most frequently the image pixel val-
ues through the volume or sum operation, i.e.
P
(x,y)∈E
Π(f)(x, y). In the particular
case of binary images, the image volume can either be computed as the sum of pixel
values or as the amount of white pixels (or 1-pixels). Granulometries and antigranu-
lometries are built similarly but are limited respectively to openings and closings, i.e.
P
(x,y)∈E
Π
γ
(f)(x, y) and
P
(x,y)∈E
Π
φ
(f)(x, y). As for local signatures, the original
series Π is often replaced in practice by its differential version ∆. Moreover, in order to
obtain a shape probability distribution function, a normalisation may be involved, each
term being then divided by the initial volume
P
(x,y)∈E
f(x, y).
We will now present several 2-D extensions to the principle of morphological sig-
nature, using the notations introduced in this section.
3 2-D Morphological Signatures
We have seen previously that the well-known (differential) morphological profile and
pattern spectrum (or granulometry / antigranulometry) operators may be written as 1-
D morphological signatures computed on a local or global scale. Here we will present
several 2-D extensions to these signatures, in order to gather more information related
either to size, intensity, or spectral information.
3.1 Size-size Signature
In the Π and ∆ series, a unique parameter λ is considered for measuring the size evo-
lution. In other words, the resulting series are generated by applying openings and clos-
ings with SE B
λ
of increasing size λ. The SE B
λ
for a given size λ can be obtained by
dilating λ times the original SE B using a given SE S:
B
λ
= {B
i
| B
i
= δ
S
(B
i−1
), ∀i ∈ {2, . . . , λ}}
λ
(9)
with B
1
= B. The SE S can be chosen either as a simple SE such as a square, a cross,
or a disc of small size (3 × 3 pixels for instance), or as B itself.
82

This definition assuming a single size parameter λ prevents us from performing
accurate measurement. Indeed, it is not adequate to elliptical or rectangular shapes for
instance, where the two independent axes should be taken into account.
So we introduce the 2-D size-size signature which is built using SE B
α,β
with two
different size parameters α and β that vary independently. The SE B
α,β
for a given pair
(α, β) of size parameters is obtained by dilating α and β times the original SE B with
two SE S and T :
B
α,β
= {B
i,j
| B
i,j
= δ
S
(B
i−1,j
), B
i,j
= δ
T
(B
i,j−1
), ∀i∀j ∈ {2, . . . , λ}}
α,β
(10)
with B
1,1
= B. A relevant choice for the two SE S and T consists in 1-D SE such as
horizontal and vertical lines respectively, with a length of 3 pixels for instance.
It is then possible to generate the Π series from this 2-D set of SE B
α,β
:
Π
ψ
(f) =
Π
ψ
α,β
(f) | Π
ψ
α,β
(f) = ψ
α,β
(f), ∀α∀β ∈ {0, . . . , n}
(11)
where the application of ψ on f with a SE B
α,β
is noted ψ
α,β
(f) and with the conven-
tion ψ
0,0
(f) = f. The ∆ series measures the differential in both size dimensions:
∆
ψ
(f) =
∆
ψ
α,β
(f) | ∆
ψ
α,β
(f) =
2Π
ψ
α,β
(f) − Π
ψ
α−1,β
(f) − Π
ψ
α,β−1
(f), ∀α∀β ∈ {1, . . . , n}
(12)
3.2 Size-intensity Signature
As we can notice in the definitions given in section 2, the pixel intensity values in
grayscale images are used either directly (at local scale) or through the sum operator
(at global scale). The original morphological signature does not take into account the
distribution of intensity values in the image. This can be seen as a strong limitation as
intensity distribution (usually measured by histogram) is a key feature when dealing
with pattern recognition in image data.
So we propose to build at the global scale a 2-D morphological signature which
takes into account both the size and the intensity distributions. To do so, let us use the
Kronecker delta function:
δ
ij
=
(
1 if i = j
0 if i 6= j
(13)
and the histogram function h
f
: T → Z:
h
f
(θ) =
X
(x,y)∈E
δ
θf (x,y)
(14)
Alternatively, we can also use the normalised histogram function h
0
f
: T → [0, 1] where
h
0
f
(θ) = h
f
(θ)/
P
θ
0
∈T
h
f
(θ
0
). The formulation of the 2-D size-intensity signature is
then given by the following Π series:
Π
ψ
(f) =
Π
ψ
λ,θ
(f) | Π
ψ
λ,θ
(f) = h
ψ
λ
(f)
(θ), ∀θ ∈ T, ∀λ ∈ {0, . . . , n}
(15)
83

and its derivative counterpart is given by the following ∆ series:
∆
ψ
(f) =
∆
ψ
λ,θ
(f) | ∆
ψ
λ,θ
(f) =
h
ψ
λ
(f)−ψ
λ−1
(f)
(θ), ∀θ ∈ T, ∀λ ∈ {1, . . . , n}
(16)
This 2-D size-intensity morphological signature gathers the properties of both the
classical morphological signature and the intensity histogram by considering size and
intensity information together.
3.3 Size-spectrum Signature
We have considered until now that the input image was monovalued. In case of multi-
spectral images where T is equal to Z
k
or N
k
, the spectral signature of the image pixels
can be involved into the morphological signature. To do so, it is possible to first com-
pute a morphological signature for each of the k spectral components (or bands) and
then to combine these k signatures into a single one, either 1-D or 2-D.
In the case of a 2-D signature, the morphological series Π can be expressed as:
Π
ψ
(f) =
Π
ψ
λ,ω
(f) | Π
ψ
λ,ω
(f) = ψ
λ
(f
ω
), ∀ω ∈ {1, . . . , k} , ∀λ ∈ {0, . . . , n}
(17)
where f
ω
is a grayscale image representing the ω
th
spectral component of f . In this
definition the marginal strategy is used, thus the correlation among the different spectral
channels is completely ignored.
To avoid this limitation, it is possible to rather consider a vectorial ordering when
applying the morphological operators γ and φ on the multispectral input image f. The
purpose of a vectorial ordering is to give a way to order vectors and thus to compute
vectorial extrema by means of the two operators sup
v
and inf
v
. Assuming a given
vectorial ordering, the fundamental dilation and erosion operators are written:
δ
v
B
(f)(x, y) = sup
v
(r,s)∈B
f(x − r, y − s), (x, y) ∈ E (18)
v
B
(f)(x, y) = inf
v
(r,s)∈B
f(x + r, y + s), (x, y) ∈ E (19)
and from these operators it is possible to write the vectorial versions of the morpholog-
ical opening γ
v
and closing φ
v
:
γ
v
B
(f) = δ
v
B
(
v
B
(f)) (20)
φ
v
B
(f) =
v
B
(δ
v
B
(f)) (21)
The morphological size-spectrum signature can finally be expressed as:
Π
ψ
(f) =
Π
ψ
λ,ω
(f) | Π
ψ
λ,ω
(f) = (ψ
v
λ
(f))
ω
, ∀ω ∈ {1, . . . , k} , ∀λ ∈ {0, . . . , n}
(22)
where (ψ
v
λ
(f))
ω
= ψ
λ
(f
ω
) in the specific case of a marginal ordering. For a compre-
hensive review of vectorial orderings and multivariate mathematical morphology, the
reader can refer to [7].
84
Finally, we can also define the differential series ∆ as:
∆
ψ
(f) =
∆
ψ
λ,ω
(f) | ∆
ψ
λ,ω
(f) =
Π
ψ
λ,ω
(f) − Π
ψ
λ−1,ω
(f), ∀ω ∈ {1, . . . , k} , ∀λ ∈ {1, . . . , n}
(23)
We have presented here several 2-D extensions to the classical morphological sig-
nature. We will now show their potential interest when computed either on a local or a
global scale through their use in various applications.
4 Applications
We have presented in the previous section several 2-D extensions to the morphological
signature, which can be computed either on a local or a global scale. The potential
interest of these extensions will be illustrated by a panel of applications made as various
as possible and related to building detection / object recognition / pixel classification.
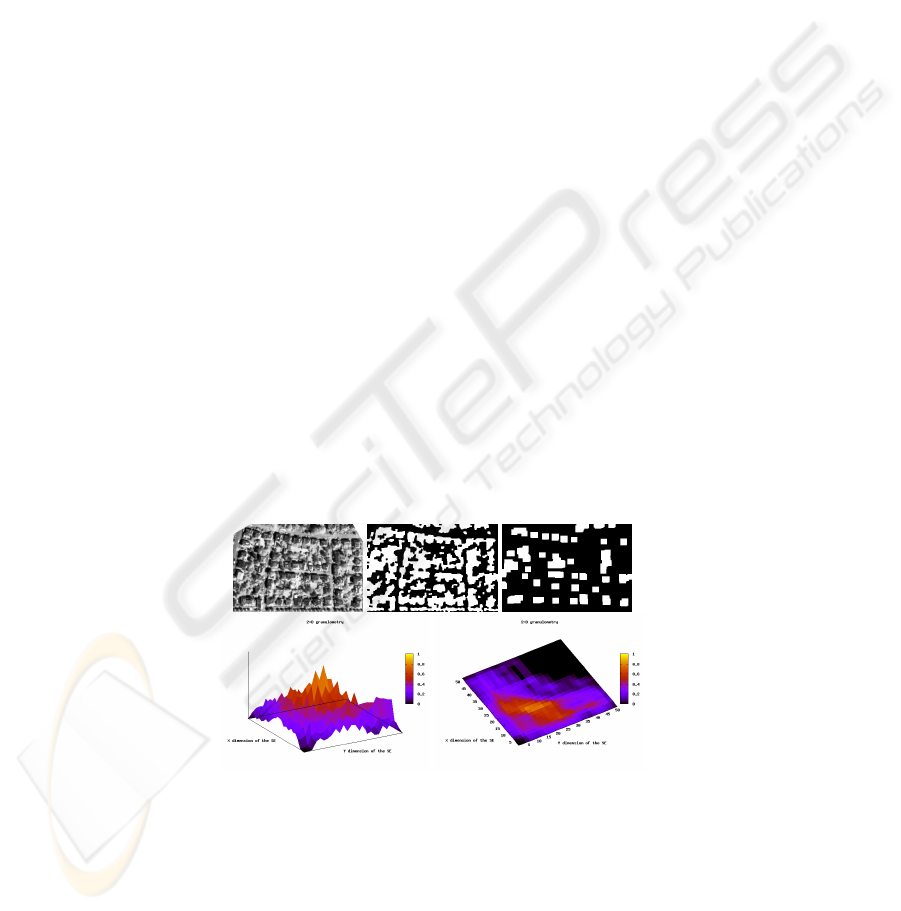
4.1 Building Detection
The 2-D size-size signature has been used as a global scale to determine optimal at-
tributes for image filtering in the context of building detection in panchromatic remote
sensed images. Binary images are obtained by thresholding the initial graylevel images.
The filter is a morphological opening whose goal is to remove all details smaller than
the estimated size for buildings visible in the binary image.
Figure 1 illustrates the relevance of the proposed 2-D granulometry (using only the
2-D version of the ∆
γ
series) to automatically determine the optimal SE to be used in
the morphological filtering process among sizes (α, β) between (10, 10) and (50, 50).
As we can observe, the proposed SE size (here 19 × 21 pixels, computed as the highest
peak) helps the building detection process by greatly reducing the noisy areas which do
not correspond to buildings. The overall process is given in [8].
Fig. 1. Relevance of the 2-D size-size global signature to determine optimal parameters
for building detection (from left to right and top to bottom): input, unfiltered and filtered
images, and curve visualisation (the highest peak determines the optimal parameter).
85
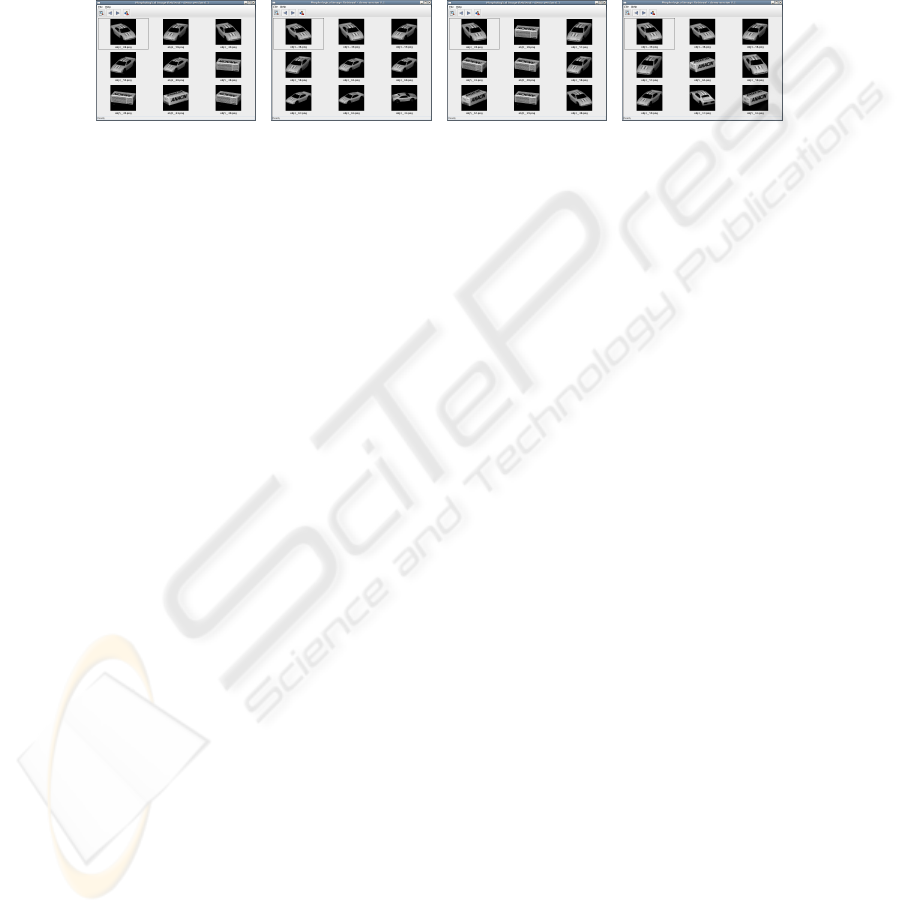
4.2 Object Recognition
In the second application we focus on object recognition in grayscale images. The fea-
ture used is the size-intensity signature which has proven to be more discrimant than
histogram. The experiments were made on the COIL-20 dataset from Columbia Uni-
versity, which contains 1440 images representing 20 objects under 72 viewpoints.
(query #1, histogram) (query #1, proposed) (query #2, histogram) (query #2, proposed)
Fig. 2. Comparison between the 2-D size-intensity global signature and intensity his-
togram for object recognition (the input is the top left image).
Considering only intensity distributions through histograms may result in some mis-
takes between objects, as illustrated by figure 2. On the contrary, when using morpho-
logical size-intensity signatures of same length, the results are better. This signature also
leads to more symetrical results, thus the two requests #1 and #2 made from a single
viewpoint variation of the same object return as first the closest images in the database
(obj3__49.png and obj3__48.png).
Some example objects and their respective 2-D size-intensity signatures are given
in the figure 3. In this figure, we have considered a combined Π series of openings and
closings with 256 values for θ and 25 values for λ. We can observe the clear difference
between the signatures of these three objects.
4.3 Pixel Classification
The third application illustrates the potential interest of the size-spectrum signature
computed on a local scale to deal with multispectral image interpretation in remote
sensing through pixel classification. The image used in this experiment is composed of
1100×900 pixels and 3 spectral components (green, red and near infra-red) and repre-
sents an urban area of Strasbourg, France (fig. 4, left). For each pixel (x, y) we consider
here a 2-D morphological signature ∆ of size 10 × 3 with λ = 5 and ω = 3, i.e. 5
openings and 5 closings for 3 spectral bands. A bayesian classification was performed
with 5 classes (buildings, roads, water, vegetation, and shadows). The learning set rep-
resents 1 % of the complete data and 10-fold cross-validation was involved. The overall
accuracy was about 80-85 % with some classes (buildings, 75 %) been worse detected
than others (water, vegetation, shadows, 95 %).
In figure 4 is given the original multispectral image in false colours and also an
example of classification result using this 2-D size-spectrum local signature. More ex-
haustive results can be found in [7].
86

5 Conclusion
In this paper we have presented several 2-D extensions to the widely used 1-D mor-
phological signature. This signature can be computed on a local or global scale, and
is respectively known as (differential) morphological profile and pattern spectrum (or
granulometry / antigranulometry). We propose to include another dimension related to
size, intensity or spectral information in complement to the initial size distribution, thus
obtaining 2-D size-size, size-intensity, and size-spectrum morphological signatures. We
finally illustrate the potential interest of these extensions through their use in various
applications: building detection, object recognition, and pixel classification.
Future work will include optimisation of the algorithms used to generate the 2-D
signatures in order to reduce the computational cost. Another perspective is to exploit in
a better way the 2-D signatures using matrix computation. We also consider to elaborate
some n-D signatures to gather more information in a single signature. Finally, we will
have to compare the proposed 2-D morphological signatures with well-known non-
morphological measures, such as wavelets or other textures descriptors.
Acknowledgements
The author wish to thank his colleagues Erchan Aptoula and Jonathan Weber for some
of the experimental works made on remote sensing applications.
References
1. Benediktsson, J., Pesaresi, M., Arnason, K.: Classification of hyperspectral data from ur-
ban areas based on extended morphological profiles. IEEE Transactions on Geoscience and
Remote Sensing 43 (2005) 480–491
2. Soille, P.: Morphological Image Analysis : Principles and Applications. Springer-Verlag,
Berlin (2003)
3. Wilkinson, M.H.F.: Generalized pattern spectra sensitive to spatial information. In: IAPR
International Conference on Pattern Recognition. Volume 1., Quebec City, Canada (2002)
21–24
4. Aptoula, E., Lefèvre, S.: Spatial morphological covariance applied to texture classification. In:
International Workshop on Multimedia Content Representation, Classification and Security
(IWMRCS), Istanbul, Turkey (2006) 522–529
5. Serra, J.: Image Analysis and Mathematical Morphology. Academic Press (1982)
6. Ronse, C.: Why mathematical morphology needs complete lattices. Signal Processing 21
(1990) 129–154
7. Aptoula, E., Lefèvre, S.: A comparative study on multivariate mathematical morphology.
Pattern Recognition (2007) To appear.
8. Lefèvre, S., Weber, J., Sheeren, D.: Automatic building extraction in vhr images using ad-
vanced morphological operators. In: IEEE/ISPRS Joint Workshop on Remote Sensing and
Data Fusion over Urban Areas, Paris, France (2007)
87
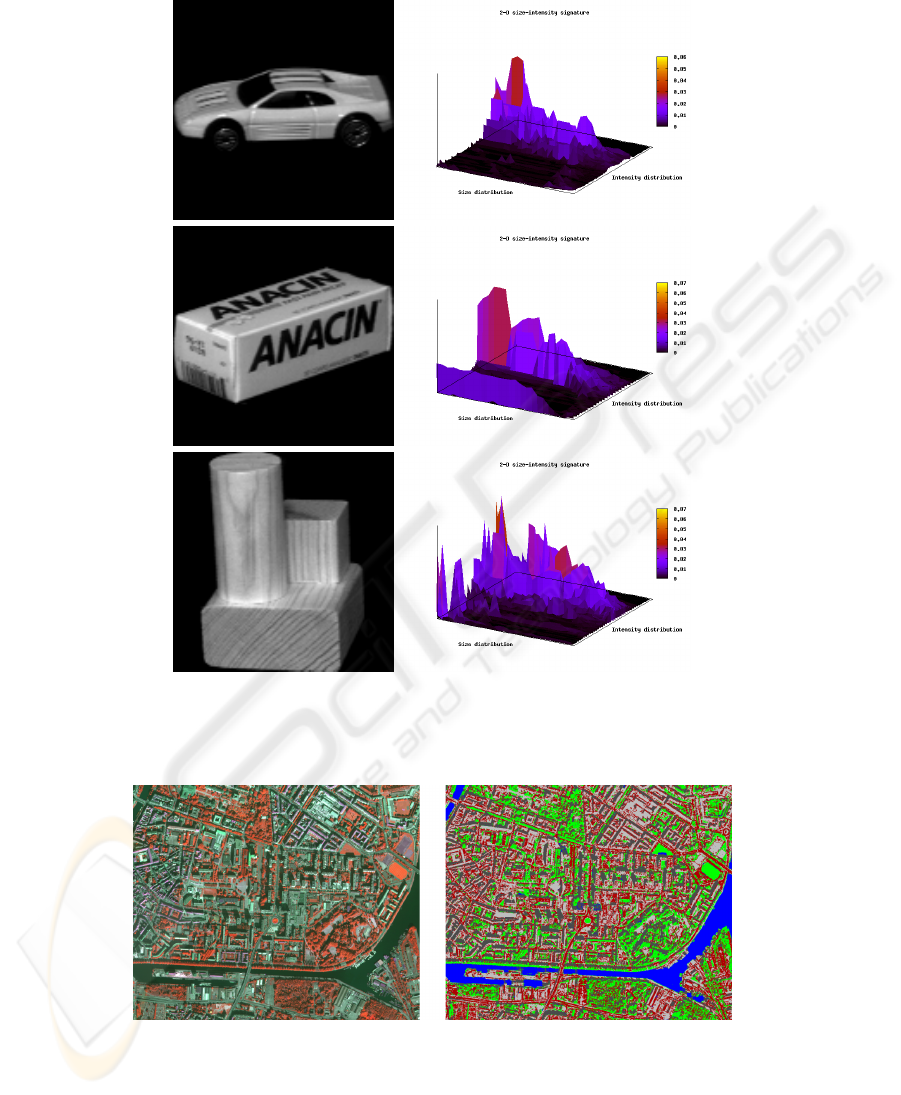
Fig. 3. Relevance of the 2-D size-intensity global signature to discriminate objects in
graylevel images: three different objects (left) with relatively similar histograms and
their respective 2-D signatures (right).
Fig. 4. Relevance of the 2-D size-spectrum local signature to classify pixels in multi-
spectral remote sensed images: input (left) and classified (right) images.
88
