
The Practicality of Multi-Tag RFID Systems
⋆
Leonid Bolotnyy, Scott Krize and Gabriel Robins
Department of Computer Science, University of Virginia
Abstract. Radio Frequency Identification (RFID) is an increasingly popular tech-
nology that uses radio signals for object identification. Successful object identifi-
cation is the primary objective of RFID technology (after all, the last two letters
of the acronym “RFID” stand for “identification”). Yet, a recent major study by
Wal-Mart has shown that object detection probability can be as low as 66%. In
this paper we address the fundamental issue of improving object detection by
tagging objects with multiple tags. This confirms for the first time the practicality
and efficacy of previous works on multi-tag RFID systems. Using different con-
figurations of commercial RFID equipment, we show significant improvements in
object detection probability as the number of tags per object increases. We com-
pare various combinations of multi-tags, readers, and antennas, and demonstrate
that adding multi-tags to a system can improve object detection probabilities more
dramatically than adding more readers. We also address issues such as tag orien-
tation and variability, effects of multi-tags on anti-collision algorithms and on
object detection in presence of metals and liquids, as well as the economics of
multi-tags.
1 Introduction
Radio Frequency Identification (RFID) uses radio communication to uniquely identify
objects [1] [2] [3]. A typical RFID system consists of readers (sometimes called bea-
cons), tags (sometimes called transponders), and back-end servers which receive and
process the information that the readers collect from the tags [4] [5] [6]. There are
two coupling mechanisms used by passive and semi-passive tags: inductive coupling
and electromagnetic backscattering (i.e., far-field propagation). In inductive coupling
the reader creates a magnetic field between itself and the tags which in turn derive
power from this magnetic field. In far-field propagation the reader sends a signal to a
tag and the tag backscatters (i.e., reflects) a response back to the reader. Some of the
major applications of RFID include supply chain management, inventory tracking, ac-
cess control, library book checkout, cattle tracking, passport tagging, and even games
[7] [8] [9] [10] [11].
When bar codes are used for object identification, bar code scanners require line-of-
sight visibility of the bar codes, and they usually must be close to the objects. Bar codes
are scanned one at a time, and scanners need to physically move from one bar code to
⋆
This research was supported by a Packard Foundation Fellowship, by NSF Young Investigator
Award MIP-9457412, and by NSF grants CCR-9988331 and CCF-0429737. For additional
related papers see http://www.cs.virginia.edu/robins
Bolotnyy L., Krize S. and Robins G. (2007).
The Practicality of Multi-Tag RFID Systems.
In Proceedings of the 1st International Workshop on RFID Technology - Concepts, Applications, Challenges, pages 100-113
DOI: 10.5220/0002436201000113
Copyright
c
SciTePress

the next in order to read them. Since this is a mechanical process, the read rate is at best
only a few bar codes per second. RFID readers on the other hand, can read hundreds
of tags per second without a line-of-sight or mobility requirement, which allows easy
automation of the reading process and makes RFID-based identification very appealing.
However, as the identification process is automated, special care is required to ensure
the detection of all objects within the reader’s field.
Ubiquitous background radio noise impedes RFID object detection. Moreover, met-
als and liquids tend to reflect and/or absorb radio signals, further degrading the reader’s
ability to achieve accurate and complete tag identification. Missed items, even at a rel-
atively low rate of 1%, can result in large financial losses for stores that rely on RFID-
enabled automatic checkout stations. This situation is real and serious, since milk, wa-
ter, juices, and canned / metal-foil -wrapped (i.e., Faraday caged) goods are commonly
stocked in markets. Practical experiments by Wal-Mart in 2005 showed 90% tag detec-
tion at case level, 95% tag detection on conveyor belts, and only 66% detection rate of
individual items inside fully loaded pallets [12].
To reduce the percentage of undetected items, we recently proposed tagging objects
with multiple tags [13], in contrast to previous works on RFID technology that assume
only a single tag per object. Although multi-tags will cost slightly more than single
tags, we experimentally demonstrate in this paper that multi-tags can be very beneficial
for many applications where higher object detection rates are required. The benefits of
attaching multiple tags per object include: (1) greater induced voltages/power aboard
some of the tags, (2) increased tag-reader communication range, (3) larger tag memory
per object, (4) enhanced security, and (5) improved overall detectability, availability,
reliability, and durability of the system [13]. This paper presents the first-ever extensive
experimental study that validates the efficacy of a multi-tag RFID system in practical
scenarios.
2 Optimal Placement of Multi-tags
Based on our previous theoretical results for multi-tags, object detection improvement
hinges on the expected grazing angle of the radio signal from the reader to the tag [13].
We performed angle analyses for two power transmission modes, inductive coupling
and far-field propagation. Let β be the angle between the arriving signal’s direction (i.e.,
the B-field) and the tag’s plane. In the case of inductive coupling, the induced voltage
aboard a tag is proportional to sin(β), and for far-field propagation, the induced voltage
is proportional to sin
2
(β)[14][13][1].
The first question is how to orient the tags relative to each other in order to max-
imize the expected grazing angle of the radio wave to one of the tags’ antennas. We
assume a uniform distribution for the signal arrival direction, since in many RFID ap-
plications the orientation of a tag’s antenna to the arriving signal can be arbitrary (e.g.,
products in a shopping cart, RFID-tagged cell phones, etc.). In the case of a single tag,
the tag can be positioned arbitrarily, since its orientation would not affect the expected
(uniformly distributed) signal arrival angle. For two tags, it is optimal to position them
perpendicular to one another in the x-y and x-z planes. Similarly, for three tags, we can
position them pair-wise perpendicularly in the x-y, x-z, and y-z planes. For four tags, it
101

Fig.1. Optimal multi-tag positioning for ensembles of 1, 2, 3 and 4 tags.
turns out that in order to maximize the expected signal incidence angle to at least one
of the tags, it is best to position them parallel to the faces of a tetrahedron, a platonic
solid
1
(see Figure 1).
The second question asks what is the actual expected maximum grazing angle of the
arriving signal with respect to the antennas of any of the tags, for a given tag ensemble.
To answer this question, we computed the expected incidence angle analytically for one
and two tags, and developed a software simulator that computes the expected angle for
an arbitrary number of tags. The results indicate a two-digit increase in the expected
grazing angle as we move from one tag to two tags, and also as we go from two tags
to three tags, but only a 3 degree average improvement as we move from three tags to
four tags. This suggests that adding an extra tag or two may be beneficial to dramati-
cally improve object detection, but attaching the fourth tag to an object may not garner
substantial detection probability improvement. These improvement trends are indeed
corroborated by our experimental results discussed below.
Many objects are box-shaped, allowing multi-tags to be positioned perpendicular
to each other, but even irregular-shaped objects can benefit from multi-tags, as demon-
strated by our experiments. RFID tags are available in many shapes and sizes, making
it feasible to attach multiple tags to any object.
3 Experimental Equipment and Setup
We performed our experiments using commercial FCC-compliant equipment, namely
Ultra High Frequency (UHF) readers from Alien Technology (model ALR-9800, four
antennas, multi-protocol, 915 MHz) and ThingMagic (model Mercury 4). We deployed
sets of linear and circular antennas from Alien Technology, and circular antennas from
ThingMagic. A single Alien Technology reader antenna can either broadcast or receive
signals, whereas the more versatile ThingMagic antenna can both send and receive sig-
nals. We used several types of tags from UPM Raflatac, the world’s leading RFID tag
manufacturer. In particular, we chose unipolar UPM Rafsec UHF tags “Impinj 34x54
ETSI/FCC” and bipolar UPM Rafsec UHF tags “Impinj 70x70 ETSI/FCC” for our ex-
periments.
1
For five or more tags, it becomes more complicated to analytically determine the optimal
relative positioning of the tags, except for specific special cases, such as for N=6 where the
tags should ideally be placed parallel to the faces of a dodecahedron, and N=10 where the tags
should be parallel to the faces of an icosahedron.
102

The experiments were conducted in an otherwise empty room, in order to minimize
radio reflection / interference anomalies. We multi-tagged a diverse set of 20 objects
2
using four tags per object. We positioned tags perpendicular to each other whenever
possible, and spread the tags far apart in space in order to minimize tag occlusion by
other tags and/or objects.
We first describe our experiments involving the Alien Technology hardware, since
this equipment allows us to collect data for both circular and linear antennas. A similar
experimental setup was used with the ThingMagic equipment. In the discussions below,
we will implicitly assume that the Alien Technology equipment was used in each ex-
periment, unless explicitly stated that the ThingMagic hardware was used instead. Sim-
ilarly, all the experiments discussed below have used the unipolar UPM Rafsec UHF
tags “Impinj 34x54 ETSI/FCC”, unless explicitly stated that bipolar tags were used.
We positioned Alien Technology reader antennas side-by-side in pairs, with each
pair consisting of a sending and a receiving antenna. In one experiment we used linear
antennas, and in the other experiment we used circular antennas. We positioned each
pair of antennas 55 inches from the center of a plastic bag containing all 20 objects,
20.5 inches above the floor, and perpendicular to the bag. The reader was operating in
“inventory mode” using Gen-2 tag reading protocol. We allowed sufficient time for the
reader to read all the tags within its range by performing many tag reads and maintaining
adequate timeouts between reads to make sure that the effects of the environmental
noise are minimized
3
.
We randomly (re)shuffled the tagged objects multiple times to change the tags’ ori-
entations with respect to the reader’s antennas in order to improve the statistical signif-
icance of the results (the values reported in the tables and graphs below are averages
over all object shufflings). We also varied the power emitted by the antennas, keeping
in mind that the distance at which tags can be detected is proportional to
√
power. We
performed our experiments for linear as well as for circular antennas using 7 different
power levels ranging from 25.6dBm to 31.6dBm, in increments of 1dBm.
4 Experimental Results
4.1 Linear Antennas
Our experiments show that multi-tags considerably improve object detection probabil-
ities for linear antennas. The detection probabilities for different numbers of tags per
object, different numbers of reader antennas, and various reader power levels are sum-
marized in Figure 2. This table shows that switching from one to two tags per object
produces a high double-digit increase in tag detection probability, and a low double-
digit increase when moving from 2 to 3 tags, but only single-digit increase from 3 to 4
tags. These results corroborate our theoretical expectations [13].
2
The multi-tagged objects included soap bars, cereal boxes, paper plates, plastic boxes, pack-
aged foods, clothing items, etc.
3
To enable others to reproduce our results, we specify here the Alien Gen-2 algorithm
parameter settings used in our experiments: TAG
TYPE = 16, ACQ G2 CYCLES = 10,
ACQ
G2 COUNT = 100, ACQ G2 Q = 2. Our source codes and scripts are available upon
request.
103
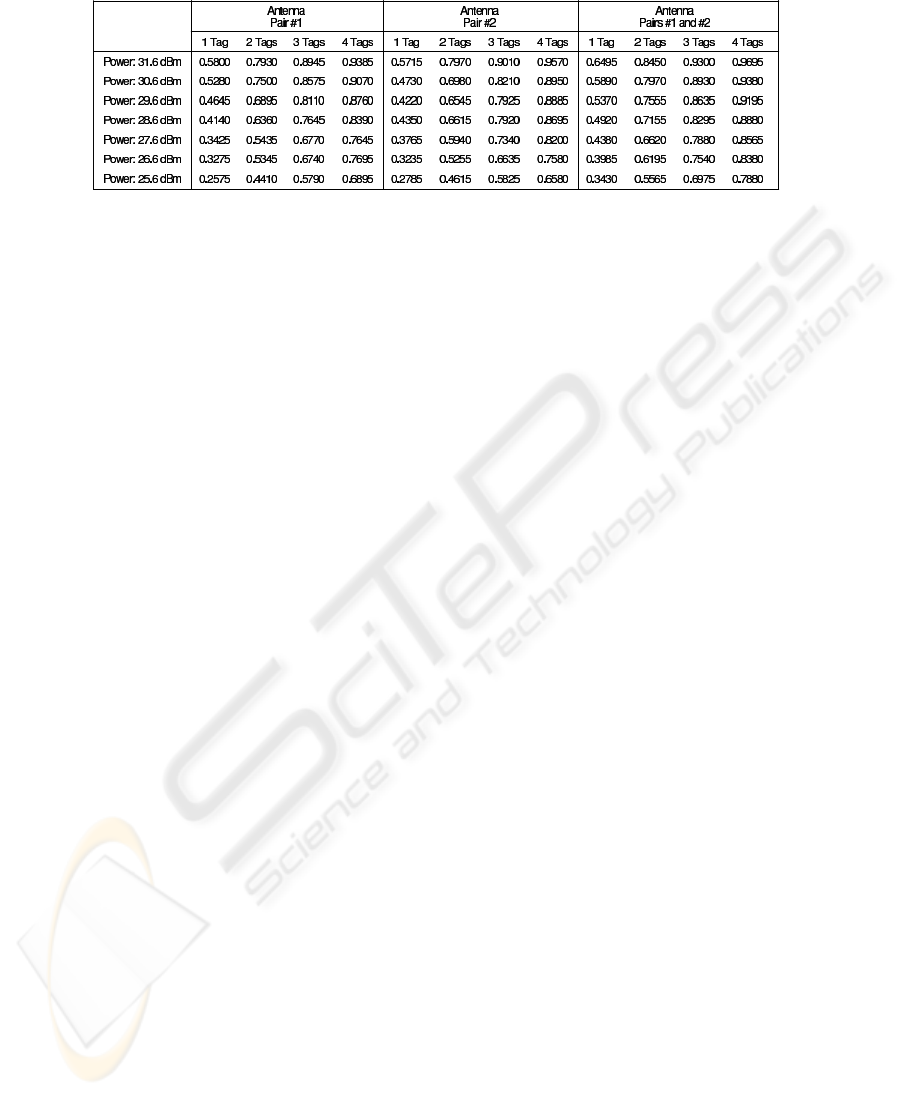
Fig.2. Detailed statistics showing the average detection probability for linear antenna(s) as a
function of the power level for different antenna configurations and for different numbers of tags
per object.
Figure 3(a) graphically shows the increase in object detection probability for each
object (the objects are sorted along the X-axis according to their detection probabili-
ties). Again, we observe significant separations between the first three curves. In Figure
3(b), we compare object detection improvements between two tags per object versus
two reader antennas. From this data we can see a dramatic double-digit improvement
from adding a second tag to each object, and only a low single-digit improvement from
adding a second reader, yielding almost a factor of 4 improvement in object detection
probability using multi-tags as compared to multi-readers.
4.2 Circular Antennas
The detection probability statistics for circular antennas are given in Figure 4. As with
linear antennas, experiments with circular antennas show a dramatic double-digit aver-
age improvement in object detection as the number of tags per object increases. How-
ever, the detection probabilities for circular antennas are higher than for linear ones,
since the orientation of objects with respect to the reader antennas varies widely. From
the comparisons of different numbers of multi-tags and multi-readers (Figure 5), we can
see that for circular antennas the advantage of adding a tag is on par with that of adding
a reader. Figure 6 gives two graphs that depict changes in object detection probability
as a function of power for various multi-tag combinations. The graphs show that the
average object detection probabilities decrease more rapidly for circular than for linear
antennas, as a function of decreasing antenna power.
5 Importance of Tag Orientation
One of the major claims made in our original theoretical paper on multi-tags [13] is
that tags need to be oriented perpendicular to each other to obtain the most benefits in
object detection. Here we experimentally confirm this claim by varying the tag orienta-
tion, collecting tag identification data, and calculating object detection probabilities for
different multi-tag orientations. We performed experiments with unipolar tags (UPM
Rafsec UHF tag Impinj 34x54 ETSI/FCC) whose plane orientation matters, and with
bipolar tags (UPM Rafsec UHF tag Impinj 70x70 ETSI/FCC) whose plane orientation
has no effect on tag detection.
104
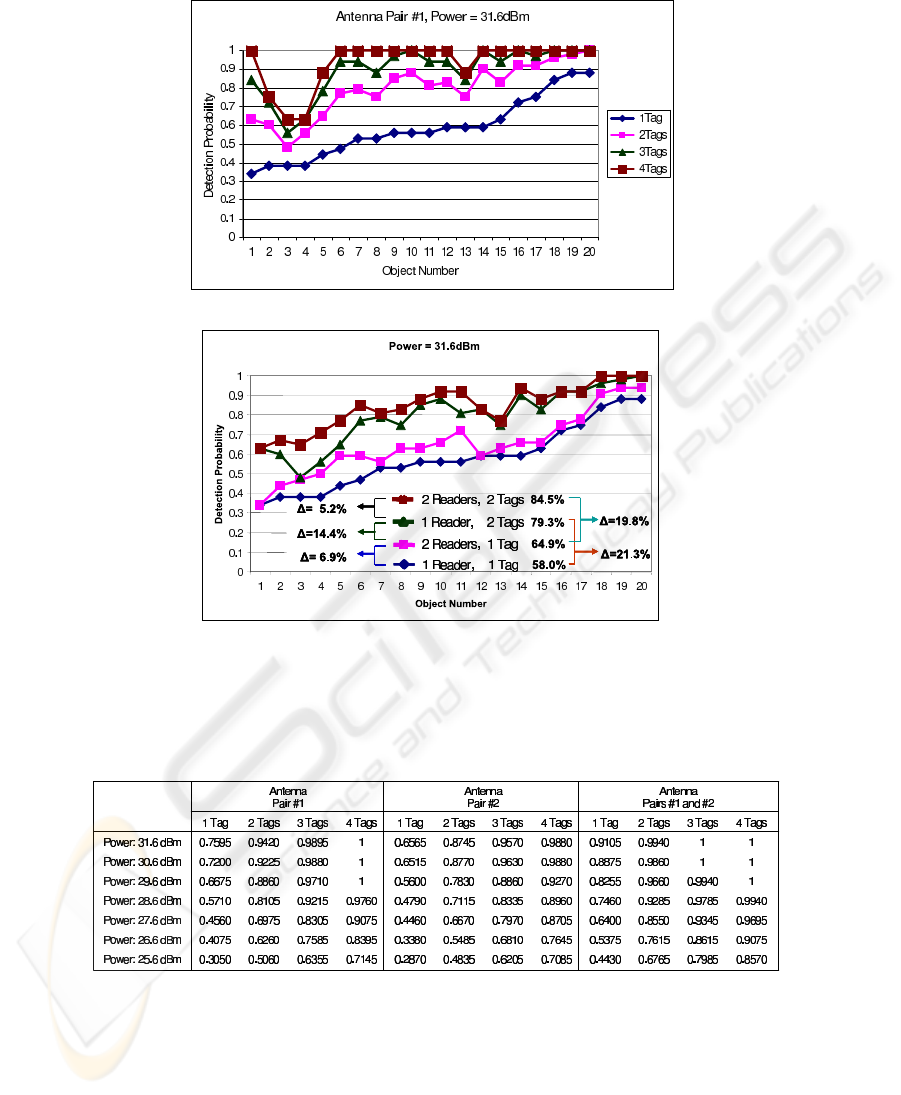
(a) Comparison of multi-tags
(b) Multi-tags versus multi-readers
Fig.3. (a) Average object detection probability improvements for linear antennas as the num-
ber of tags per object increases. (b) Comparisons of multi-tags with multiple readers for linear
antennas. Note that attaching multiple tags to an object yields higher average object detection
probabilities than adding more readers.
Fig.4. The statistics table shows the detection probability for circular antenna as a function of
the power level for different antenna configurations, and for different numbers of tags per object.
With unipolar tags we ran experiments comparing differently oriented pairs of tags.
One orientation which we call 180-same refers to two tags positioned on the same
105
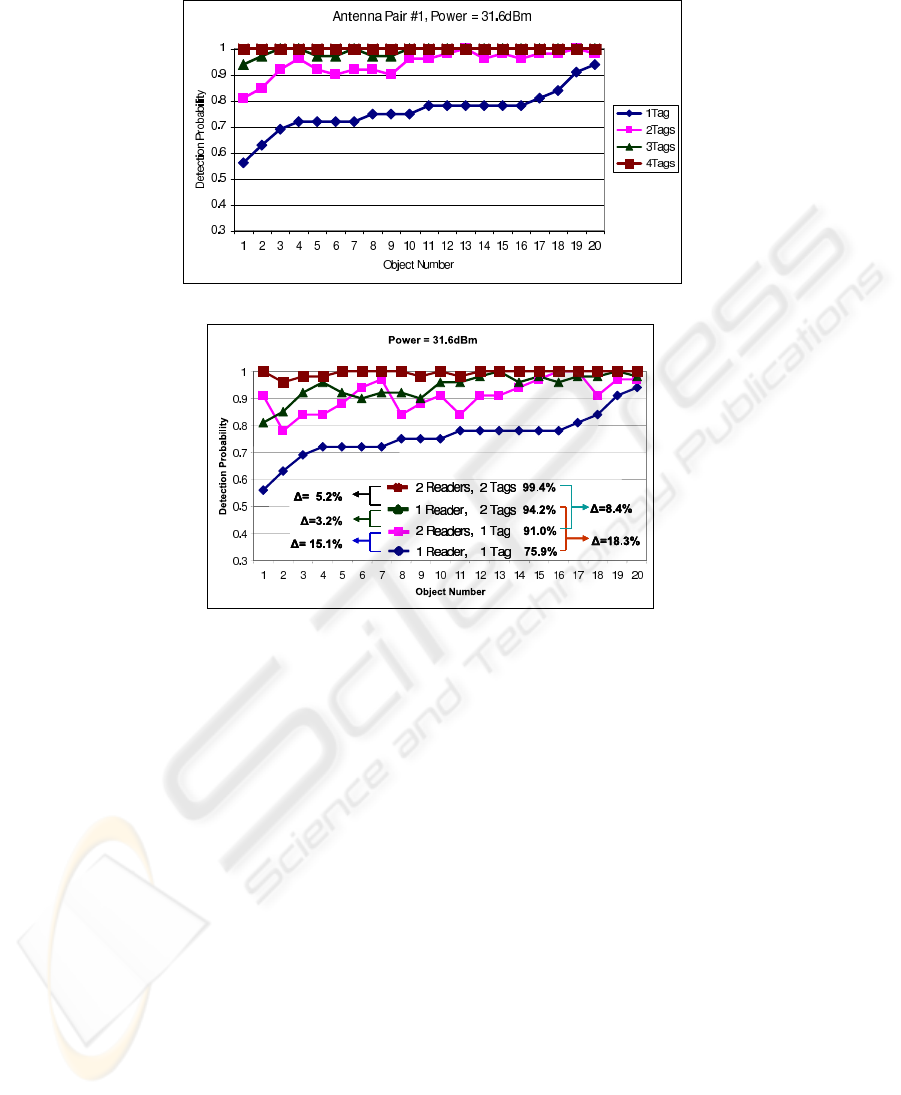
(a) Comparison of multi-tags
(b) Multi-tags versus multi-readers
Fig.5. Figure (a) shows the improvement in object detection probability for each object for cir-
cular antennas as the number of tags per object is increased. Figure (b) compares multi-tags
with multiple readers for circular antennas. Attaching multiple tags to an object produces higher
object detection probability than adding more readers.
plane and having identical orientation. The second orientation 180-diff refers to two
tags positioned on the same plane, but one of the tags is rotated 90 degrees relative
to the orientation of the other tag. The third orientation 90-same refers to two tags
having identical orientation, but positioned on perpendicular planes. Finally, the forth
tag orientation 90-diff refers to two tags positioned on perpendicular planes with one
tag rotated 90 degrees relative to the other tag. In our experiments we compared these
four different tag orientations, and the results are presented in Figure 7(a). The results
show that tags perpendicular to each other yield a higher probability of detecting at least
one of them than tags that have identical orientation. In addition, to increase detection
probability, it is better to position tags on perpendicular planes, rather than to locate all
the tags in the same plane.
With bipolar tags we compared two possible tag orientations - 180, where tags are
positioned on parallel planes, and 90, where tags are positioned on perpendicular planes.
106
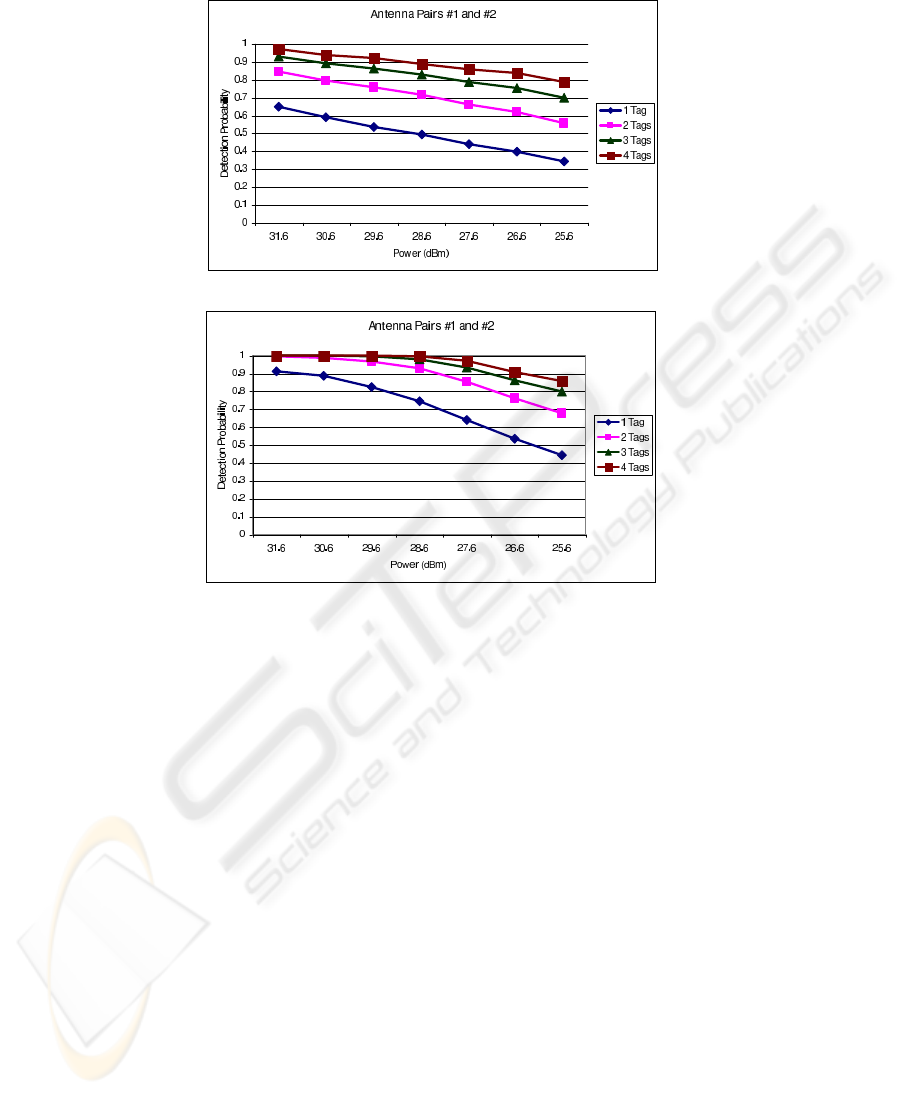
(a) Two linear antenna pairs
(b) Two circular antenna pairs
Fig.6. The two graphs show the detection probability for linear and circular antennas as a func-
tion of reader power for different numbers of tags per object. Observe that the detection proba-
bility decreases at a faster rate for circular than for linear antennas, as expected.
These are the only possibilities since tag orientations within the plane have no effect
on bipolar tag detection. The results of the experiments shown in Figure 7(b) demon-
strate no difference between tag orientations for omni-directional/circular antennas, but
a drastic advantage for perpendicular 90 tags over parallel 180 tags for directional/linear
antennas. These results show that multi-tags improve object detection not only because
they increase the total antenna size per object and decrease the probability of antenna
occlusions, but also because the expected grazing angle between the signal from the
reader and one of the tags increases, which in turn raises the expected power on-board
one of the tags. These findings confirm our theoretical expectations.
6 Controlling the Variables
It is important in RF experiments to carefully isolate and control the variables in order to
ensure the accuracy of the results. Specifically, we controlled the effects of radio noise,
reader variability, tag variability, the number and type of reader antennas, reader power
107
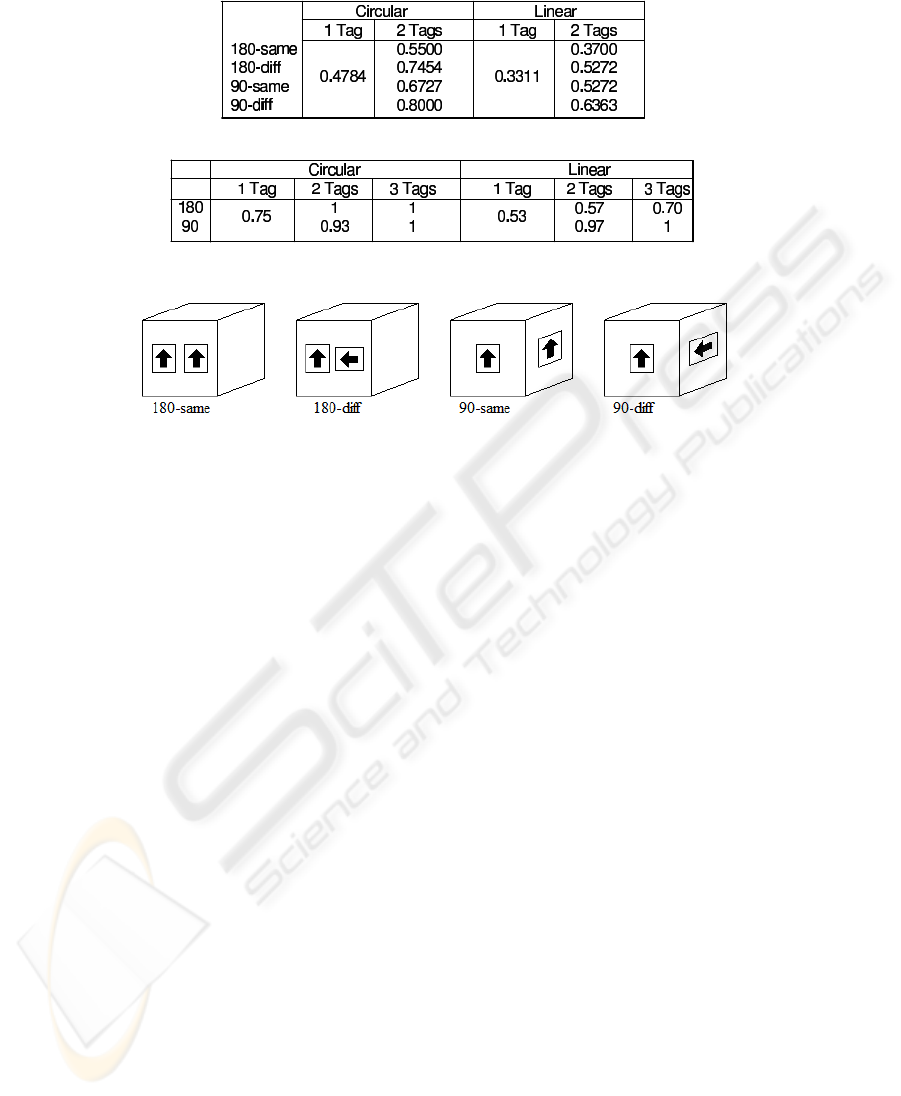
(a) Unipolar tag orientation comparison.
(b) Bipolar tag orientation comparison.
(c) Unipolar tag orientations.
Fig.7. The two tables comparing object detection probabilities for unipolar and bipolar tags
for different multi-tag orientations. The results show the significance of perpendicular multi-tag
orientation, especially for directional/linear antennas. In Figure 7(a), 180-same refers to identi-
cally oriented tags positioned on parallel planes; 180-diff refers to perpendicularly oriented tags
positioned on parallel planes; 90-same refers to identically oriented tags positioned on perpen-
dicular planes; 90-diff refers to perpendicularly oriented tags positioned on perpendicular planes.
In Figure 7(b), 180 refers to tags positioned on parallel planes; 90 refers to tags positioned on
perpendicular planes.
level, and the distance from the reader antennas to the objects. To control the effect
of ambient radio noise, we ran our experiments multiple times, sometimes even across
multiple days to ensure that statistical properties of the data are stable. To accurately
calculate improvements in object detection with multi-tags, we allowed sufficient time
for the reader to read the tags. The reader parameters were carefully selected to ensure
that all tags within a reader’s detectability range are read. To ensure that our results
are independent of the particular reader and antenna manufacturer/brand, we ran our
experiments with readers and antennas from two different manufacturers. In all of our
experiments we used consistent tag types and ensured that tag variability does not affect
our experiments. We will discuss tag variability further below. The reader and identical
reader antennas were carefully selected and objects were placed on a rotating platform
at a fixed distance from the reader. The reader power levels were carefully controlled
via a parameter in the software driver.
6.1 Tag Variability
To determine tag properties and control tag variability we performed multiple tag vari-
ability tests. RFID tags with different chip manufacturers and antenna geometries have
108

different detectability/receptivity properties [15]. The importance of tag receptivity and
its use as a tag performance metric is addressed in [16]. Similarly, no two chips are
truly identical due to inherent VLSI manufacturing variations [17]. Indeed, we found
differences in tag detectability among tags of the same type, even among ones com-
ing from the very same tag roll. In fact, these inherent tag receptivity differences were
surprisingly high, with up to an order-of-magnitude difference in detectability between
the “best” and “worst” tags. These findings provide yet another incentive for deploying
multi-tags in order to ensure consistent object detection.
In our tag variability experiments, we used a ThingMagic reader, one circular Thing-
Magic antenna, and “UPM Rafsec UHF tag Impinj 34x54 ETSI/FCC” tags. Tags were
elevated 26 inches from the floor, and positioned perpendicular to the antenna at a
distance of 59.5 inches from the antenna center. The reader power level was set to
31.6dBm. Each tag was read 200 times and the number of successful reads was recorded.
We paused for 50ms between reads to allow tags sufficient time to lose power and ini-
tialize their state. The reader was allotted 10ms to read a tag. In this way, we computed
the detectability/receptivity of 75 seemingly identical tags. To ensure data consistency,
each experiment was performed twice and repeated the next day with the tags rotated
180 degrees.
The smallest number of successful reads out of 200 was 8 and the largest was 91.
The average was 43.44 and the standard deviation was 23.92. The Pearson product-
moment correlation coefficient between two reads of each tag on the same day was
0.99 and the correlation between reads across two days was 0.98. Figure 8(b) shows
the distribution of the number of successful tag reads. Figure 8(a) compares the num-
ber of successful reads for each tag across the two sets of experiments conducted on
consecutive days, and Figure 8(c) depicts how the number of successful reads varies
across different days. To magnify the visual spread between tags, we show the number
of successful tag reads out of 400 by summing the detectability across the two runs of
each day. Similarly high tag detectability variations were found in other UPM Rafsec
tag types.
6.2 Reader Variability
To ensure that our results are not dependent on the reader/antenna manufacturers, we
repeated our experiments using ThingMagic readers and ThingMagic circular antennas.
Since the tag detection algorithms used by ThingMagic and their implementations are
different from those of Alien Technology, and since ThingMagic antennas are much
bigger than those by Alien Technology, the detection probabilities we obtained differed
between these two systems. However, the percentage improvements of multi-tags ver-
sus single-tagged objects were similar for both systems, supporting our hypothesis that
the percentage improvements in object detection using multi-tags is mostly indepen-
dent from the specific equipment used. Figure 9 shows the statistics of object detection
improvements using circular ThingMagic antennas for a different number of tag en-
sembles per object. Note that the ThingMagic equipment enabled the collection of data
for 3 and 4 antennas, whereas the Alien Technology readers work with only 1 and 2
antennas.
109

(a) Comparison of the number of successful reads per tag across two
days. The tags are sorted based on the number of successful reads to
better illustrate the data.
(b) This graph shows the distribution of successful tag reads across two days and
two tag orientations. The number of successful reads shown is out of a total of 400
attempted. We observe a significant separation between several “clusters” of tag per-
formance levels.
(c) This graph shows how the number of successful tag reads on the second
day deviates from the number of successful reads on the first day.
Fig.8. Characterizing tag detectability/receptivity by comparing the number of successful tag
reads, the distribution of these reads, and the deviation in the number of reads across multiple
experiments.
110
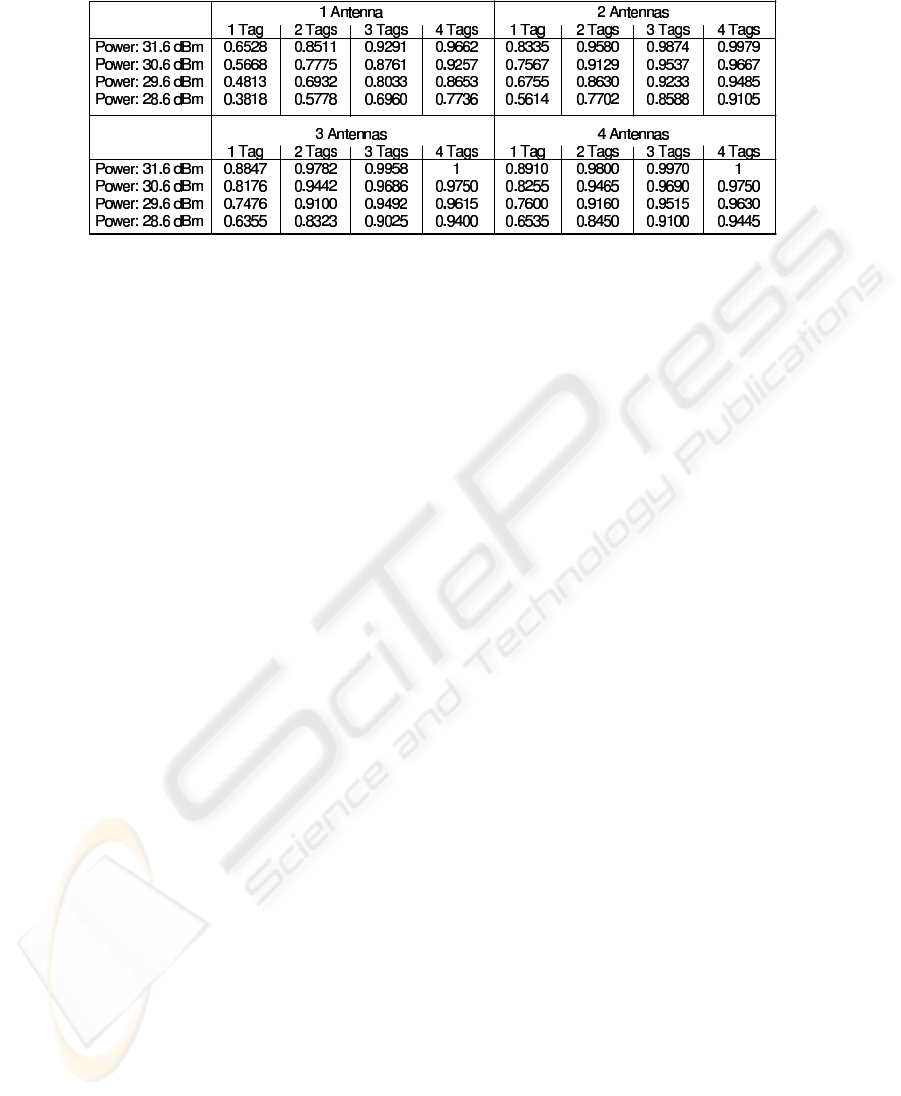
Fig.9. The detection probability statistics for circular ThingMagic antennas as a function of the
power level for different antenna configurations and for a different number of tags per object.
7 Effects of Multi-tags on Anti-collision Algorithms
Anti-Collision algorithms allow a reader to uniquely identify tags while minimizing the
number of tag broadcasting collisions (i.e., simultaneous interfering transmissions by
the tags). Multi-tags have no effect on two variants of Binary Tree-Walking [1] [18],
and may at most double/triple the total read time for dual/triple-tags over single tags
for Slotted Aloha [1] and for Randomized Tree-Walking [19] [20] [21]. Our current
experimental study of multi-tags addressed how multi-tags improve object detection. It
is worth noting, however, that since not all tags are detected, the time required to identify
all reader-visible tags is considerably less than double (or triple) the time needed to
identify single-tagged objects.
In particular, from our experiments we observed that 25% to 65% of all tags are
detected with one reader antenna, depending on its type and power level. Therefore,
attaching two tags to each object may not add any significant overall time delay for
object identification. In addition, current RFID technology can read hundreds of tags
per second, making the increase in the number of tags insignificant, even for real-time
systems. Moreover, in many scenarios the benefits of successfully identifying all the
objects certainly justifies a modest increase in identification time.
8 Object Detection in Presence of Metals and Liquids
So far, our discussion of multi-tags has been restricted to scenarios where the objects to
be identified contained no metal or liquid materials. In practical scenarios however, sets
of items to be identified can contain mixtures of non-metallic objects, as well as partly
metallic and liquid objects, making reliable object identification more problematic. It
is more difficult to detect metals and liquids because they tend to interfere with ra-
dio signals, thus preventing readers from receiving accurately decodable tag responses.
Metallic and liquid objects can also occlude other non-metallic objects, and thus inter-
fere with the detection of these as well.
To detect metallic and liquid objects in our experiments, we had to considerably
reduce the distance from the objects to the readers and to operate readers at high power
111

levels. Based on our experimental results, multi-tags are highly effective in improving
object detection in the presence of metallics and liquids. We observed an almost lin-
ear improvement in metallic and liquid object detection when the number of tags per
object is increased, as compared to the rapidly increasing and then leveling curve for
solid non-metallic objects. In addition, when metals and liquids are present, the detec-
tion probability curve for solid and non-metallic objects drops considerably, due to the
radio interference created by the metallics and liquids. A more detailed treatment of the
effects of multi-tags on metallic and liquid object detection will be reported elsewhere.
9 Economics of Multi-tags
Based on the results presented in this paper, we see that object detection probabili-
ties are far from perfect even when multiple antennas and readers are used. Multi-tags,
potentially in conjunction with multiple readers, can provide a viable solution to this
problem. The cost of RFID tags in 2007 is around 10-20 U.S. cents a piece, making
multi-tagging of high cost items viable even now. In addition, the cost of tags is drop-
ping at an exponential rate following Moore’s law, allowing for the cost-effective tag-
ging of even low-cost objects in the near future. Also, RFID tags decrease in cost at a
substantially faster rate than RFID readers, due to the economy-of-scale and improved
yield trends inherent in their manufacturing; moreover, this price gap is expected to
continue to widen. The future omnipresence and ubiquity of RFID tags is expected to
eventually bring down the cost of RFID tags into the sub-penny level.
Many RFID tag types are delivered to the customer on a continuous paper roll,
and the customer later programs the tags with unique IDs. We envision that tags will
soon be cheap enough to embed into adhesive packaging tape that wraps around pack-
ages/containers, thus simplifying the multi-tagging of boxed objects and enabling auto-
matic tag diversity and orientation selection to greatly improve object detection at negli-
gible cost. Also, with higher tag ubiquity and the multi-tagging of objects, the testing of
RFID tags will not be required as tag production yields become almost irrelevant, thus
further reducing the cost of tag manufacturing and ensuring high object detection prob-
abilities as well as improved dependability and reliability of RFID systems. In short,
multi-tags are absolutely economically viable, and these benefits are bound to become
even more dramatic over time.
10 Conclusion
Our experiments indicate that multi-tags are highly effective in improving object de-
tection probability, yielding double-digit improvements over traditional single-tagged
object RFID systems using both linear and circular antennas. Moreover, multi-tags can
offer significantly larger improvements in object detection as compared to adding ex-
tra readers, even in the presence of objects containing metals and liquids, without ex-
acerbating the burden on anti-collision algorithms. Multi-tagging of some objects is
economically viable today, and as the cost of tags decreases rapidly, a wider range of
applications will become possible with each year. We conclude that multi-tags can be
112

an effective, and economically viable solution for RFID applications that require higher
object detection probabilities.
References
1. Finkenzeller, K.: RFID Handbook. Wiley & Sons (2003)
2. Shepard, S.: RFID - Radio Frequency Identification. McGraw-Hill, New York (2005)
3. U.S. House of Representative Subcommittee on Commerce, Trade, and Consumer Protec-
tion: RFID Technology - What the Future Holds for Commerce, Security, and the Consumer.
University Press of the Pacific, Honolulu, Hawaii (2004)
4. Furness, A., Smith, I.G.: RFID Compendium - The Technology and Where to Use It. Auto
ID Service Providers, Halifax, England (2004)
5. Garfinkel, S., Rosenberg, B.: RFID - Applications, Security, and Privacy. Addison-Wesley
(2006)
6. Polizzi, T.: RFID in the Enterprise for Cross-Enterprise Business Automation. WCCN
Publishing, Irvine, CA (2004)
7. Arneson, E.: Hyperscan - rfid game system from mattel.
http://boardgames.about.com/od/news/a/hyperscan.htm (2006)
8. Bhuptani, M., Moradpour, S.: RFID Field Guide - Deploying Radio Frequency Identification
Systems. Sun Microsystems Press, New Jersey (2005)
9. Heinrich, C.: RFID and Beyond. Wiley Publishing, Indianapolis, IN (2005)
10. Jilovec, N.: EDI, UCCnet and RFID - Synchronizing the Supply Chain. 29th Street Press,
Loveland, CO (2004)
11. Kleist, R.A., Chapman, T.A., Sakai, D.A., Jarvis, B.S.: RFID Labeling - Smart Labeling
Concepts & Applications for the Consumer Packaged Goods Supply Chain. Printronix, Inc.,
Irvine, CA (2004)
12. IDTechEx: Rfid progress at wal-mart. http://www.idtechex.com/products/en/articles/
00000161.asp (2005)
13. Bolotnyy, L., Robins, G.: Multi-tag radio frequency identification systems. In: Proc. IEEE
Workshop on Automatic Identification Advanced Technologies (Auto-ID). (2005) 83–88
14. Balanis, C.A.: Antenna Theory Analysis and Design. Wiley & Sons (1997)
15. Schuster, E., Scharfeld, T., Kar, P., Brock, D., Allen, S.: Analyzing the rfid tag read rate
issue. (http://mitdatacenter.org/CutterITAdvisor.pdf)
16. Impinj: Receptivity - a tag performance metric.
http://www.impinj.com/files/MR MZ WP 00005 TagReceptivity.pdf (2005)
17. Chen, Y., Kahng, A.B., Robins, G., Zelikovsky, A.: Area fill synthesis for uniform layout
density. IEEE Trans. Computer-Aided Design 21 (2002) 1132–1147
18. Juels, A., Rivest, R., Szedlo, M.: The blocker tag: Selective blocking of rfid tags for con-
sumer privacy. In Atluri, V., ed.: Proc. ACM Conference on Computer and Communications
Security, Washington, DC, USA (2003) 103–111
19. Bolotnyy, L., Robins, G.: Randomized pseudo-random function tree walking algorithm for
secure radio-frequency identification. In: Proc. IEEE Workshop on Automatic Identification
Advanced Technologies (Auto-ID). (2005) 43–48
20. Center, A.I.: (2003) Draft Protocol Specification for a 900 MHz Class 0 Radio Frequency
Identification Tag.
21. Weis, S.: Security and privacy in radio-frequency identification devices. Master’s thesis,
MIT (2003)
113
