
ULTRASONIC MOTION TRACKING OF INSTRUMENTS IN
OPERATING THEATRE
Alejandro Ibarz, Roberto Casas, Álvaro Marco, Héctor Gracia, Rubén Blasco and Jorge Falcó
Instituto de Investigación en Ingeniería de Aragón,(Tecnodiscap Group)
Universidad de Zaragoza. María de Luna 1, Zaragoza, Spain
Keywords: Indoor positioning, motion tracking, ultrasound ranging, accurate localization.
Abstract: The purpose of this paper is to address the design of a system to track surgical instrument’s movement
during an operation. Motion tracking of surgical instruments is one of the most interesting methods to
survey the data needed for medical robotics, computer-aided surgery, skills assessment and training progress
applications. Over the wide range of tracking technologies, low frequency ultrasound was selected to meet
the system’s requirements. Factors that bring about measurement inaccuracies are analysed and taken into
account when developing the system. Furthermore, a localization algorithm that calculates three-
dimensional position using one-dimensional distances and overriding signal blockage is presented.
Moreover, experimental results of a resectoscope mock up motion tracking are shown.
1 INTRODUCTION
With the spread of minimally invasive surgery and
training in this field, development of metrics for
medical robotics, computer-aided surgery, skills
assessment and training progress has become
increasingly important.
There is a wide range of technologies for motion
tracking: computerized tomography, nuclear
magnetic resonance imaging, video-based imaging,
ultrasound imaging, optical tracking systems,
electromagnetic tracking systems, inertial,
ultrasound positioning, etc. They can be
characterized according its price, complexity,
accuracy and drawbacks. Most of these technologies
are not suitable for designing a indoor positioning
system meant for operating theatres (Tatar, 2006;
Bianchi 2007). However, low frequency ultrasound
positioning offers promising perspective measuring
one-dimensional distances. Moreover, a more
thorough analysis will be done to use low frequency
ultrasound for motion tracking purposes.
The purpose of this paper is to design an
ultrasound indoor positioning system. It has to be
able to track the motion of a surgical instrument
during the operation. Furthermore, system’s
requirements are low-cost, low-complexity and
accuracy enough to track instrument’s position
properly. The final and most important requirement
is that devices placed on the instrument can not
restrict surgeon’s movements or put the patient in
risk.
Concerning the exactitude of the system, the
design of the electronics will be analysed, as well as
the method of time of flight measurement to obtain
an accuracy of millimetres. In order to obtain this
accuracy, it will be necessary to analyse the
influence of environmental factors and correct its
effects. The ultimate goal is to objectively assess
instrument localization in a realistic environment;
i.e., the operating room.
2 ULTRASONIC TRACKING
Generally speaking, ultrasonic positioning systems
are based on different subsystems: transducers on
the mobile that needs to be located, transducers
places on known positions and one or several
computing units (PC, microprocessor or DSP). In
order to obtain mobile’s unknown position; one-
dimensional distances from fixed transducers to
mobile transducers have to be surveyed. After
obtaining the one-dimensional data, mobile’s
coordinates can be calculated by a computing unit
using a location algorithm.
186
Ibarz A., Casas R., Marco Á., Gracia H., Blasco R. and Falcó J. (2008).
ULTRASONIC MOTION TRACKING OF INSTRUMENTS IN OPERATING THEATRE.
In Proceedings of the First International Conference on Biomedical Electronics and Devices, pages 186-189
DOI: 10.5220/0001053301860189
Copyright
c
SciTePress
A generic ultrasound positioning system has
been described. Afterwards, the system has to be
adapted to the operating theater characteristics.
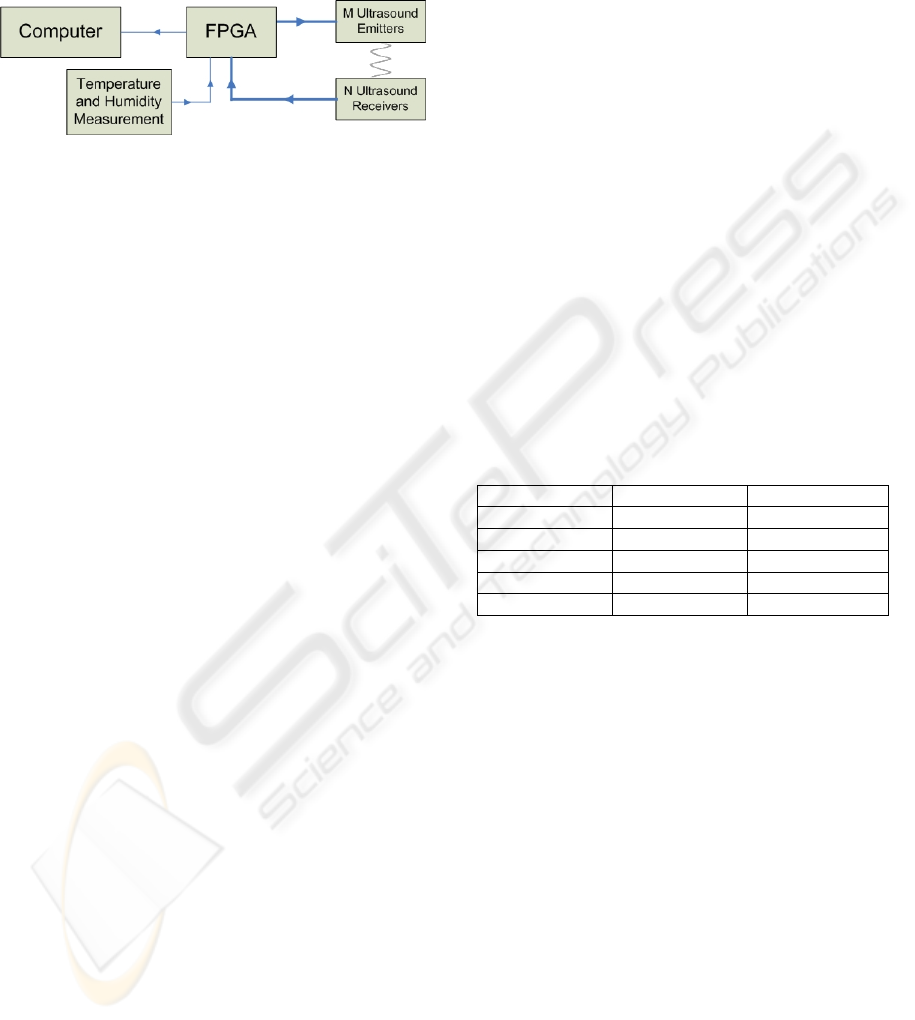
The system’s architecture is as follows:
Figure 1: System’s architecture.
Emitting transducers (at least 3 to determine
mobile’s position) need to be placed on the surgical
instrument on known position (in order to compute
the instrument’s position).
Receiving transducers have to be placed on the
ceiling to avoid non-line of sight issues. To ensure
good performance of the system, the coordinates of
receiving transducer should be known as much
accurate as possible.
The FPGA assigns a temporal interval to each
emitter module. It commands the emitter to generate
ultrasound chirps; simultaneously the ultrasonic time
of flight (TOF) to the receiving transducers will be
computed and stored (as well as ambient
temperature and humidity). After the FPGA sends
all surveyed data, the computer will obtain the
coordinates of all emitting transducers and the
instrument’s position.
2.1 Ambient Influence in Operating
Rooms
In this sub chapter, several factors that may affect
system’s performance will be analysed. This
analysis will take into account operating room (OR)
ambient characteristics and several others
considerations that may bring about measurement
inaccuracies.
Update rate: The frequency of the
measurements reported by the tracking system. The
higher this parameter the better tracking results are
obtained. The TOF system has a low update rate
caused by the low speed of sound and the sequential
triple emission of pulses.
Misalignment between transducer pairs: Due
to the quantity of receiving transducers and the wide
range of mobile’s movements, we cannot expect to
have perfect alignment between transducers pair
(emitter-receiver). It has been stated (Lamancusa,
1990) that misalignment between transducer pairs
will bring about a distance measurement error.
Ultrasound wave reflection on surfaces:
Reflections on surfaces has been used in ultrasound
distance measurement systems, using echoes to
determine distances to surfaces. Nevertheless,
considering the number of medical instruments in
OR (lamps, monitors, tables), echoes might bring
about measurement errors to our system and affect
system’s robustness. Therefore, reflection on
surfaces should be analyzed and taken into account
in system’s design.
Airflows: Most of these systems are based on
calculating the ultrasound TOF and multiplying it by
the sonic air speed to obtain the distance. Therefore,
airflow will modify the speed which the ultrasound
moves in the air.
Temperature: The temperature is an
environmental factor to consider when designing an
accurate ultrasound positioning system, as it affects
the speed of sound (Liao et al, 2004).
Relative Humidity: The relative humidity
modifies the speed of sound, affecting distance
measurement (Liao et al, 2004).
Table 1: Inaccuracies due to ambient factors.
Parameter Accuracy Max. Error
Temperature 0.3 º C 1.77 mm
Humidity 1.8 % RH 0.4 mm
Misalignment --- 1 mm
Airflows --- 1.3 mm
Total --- 4.4 mm
2.2 Distance Measurement
Once analysed the environmental factors (table 1)
that influence distance measurements, we will
analyse the measurement process. This part includes:
generation of ultrasonic chirps, reception and
treatment of the signals; and determination of TOFs.
TOF is the time elapsed between the
transmission of a pulse and its reception, from which
the target distance can be calculated multiplying
speed of sound in air by TOF. Using TOF to
measure the distance, the system errors are primarily
due to amplitude degradation of the received signal,
and uncertainty in the speed of sound.
There is a close relation between generation of
ultrasonic chirps and the method to determine TOFs
and distances (Tatar, 2006; Huang et al, 2002).
Moreover, the chirp generation method can affect
system’s performance. For example, some methods
require longer chirps, lowering system’s update rate
ULTRASONIC MOTION TRACKING OF INSTRUMENTS IN OPERATING THEATRE
187
and making them less robust to reflections on
surfaces.
The chosen method of emission was based on
self-interference (Cai, 1993), using short chirps and
giving the signal in reception a specific form that
will take be used to determine TOF and afterwards
the one-dimensional distance. Allocating an event on
the signal close to its start will make the method
more robust to reflections on surfaces.
The method implemented in the FPGA consists
on storing several time stamps of the moments when
the signal exceeds a predefined threshold. These
data are processed through an algorithm in the
FPGA to determine where the event is located, and
afterwards this time is corrected to obtain the TOF.
Experimental tests were done to assess the
precision of determining the TOF using this method.
Placed both emitter and receiver at a fixed distance,
the distances obtained had a standard deviation of
300 μm and a resolution of 7 μm. The system was
also able to measure distance between transducers
with a high degree of misalignment.
2.3 Location Calculation
2.3.1 Problem formulation
We have to solve the classic multilateration
problem. Calculate the position of the transmitter
(x
P
,y
P
,z
P
) from the estimation of several distances
(d
i
) to emitters having known coordinates
(x
bi
,y
bi
,z
bi
). Distances have been estimated as
indicated in previous subsection.
At least three distances are required to solve the
aforementioned trilateration problem.
Unfortunately, this is not typically the case in real
operations where one or more of the distances may
contain large errors produced by multipath effects
and the blockage of the ultrasonic signal.
2.3.2 Location Algorithm
Our aim is to solve the proposed problem when it is
not possible to use any prior information to solve the
multilateration. It is not possible to identify the
measurements affected by error, or whether there are
any. In the end, there is redundant data within
unidentified, erroneous information, which must be
filtered out to compute the best solution.
Robust estimators provide methods for detecting
outliers, and they obtain trustworthy results even
when a certain amount of data is contaminated. The
LMedS method used (Casas, 2006) searches in the
space of solutions obtained from subsets of the
minimum number of data. As we require a minimum
of three distances to compute the location and there
are a total of n, we make m subsets of three
distances:
()
!n!
n!
=m
33 −
(1)
For each subset Si of distances (du, dv, dw), we
compute a location Pi (xi, yi, zi) by solving the
system of equations of using any traditional
technique such as least squares:
where i = 1,…,m and (xBSj, yBSj, zBSj) are the
coordinates of BSj being j = u, v, w.
For each location Pi, we obtain the residues Ri
as:
(
)
(
)( )
22 2
11 22
ˆˆ ˆ
,,,
iinin
dd dd dd
⎛⎞
=− − −
⎜⎟
⎝⎠
i
R K
()()()
22
2
ˆ
1,...,
ik i BSk i BSk i BSk
dxx yy zz
kn
=− +− +−
=
(3)
And compute the median Mi of the residues Ri.
The final solution P (x, y, z) is that with the
minimum median Mi.
2.4 Instrument’s Localization
As an experimental implementation (figure 2), a
motorized resectoscope mock up have been used.
The distances between emitters and receivers were
processed by the computer through the localization
algorithm in order to obtain the instrument’s
unknown position.
According the results (figure 3), can be stated
that the system has a good dynamic behavior.
Moreover, can be stated the good performance of
localization algorithms and solution filtering.
()()()
()()()
()()()
222
222
222
u i BSu i BSu i BSu
v i BSv i BSv i BSv
w i BSw i BSw i BSw
dxx yy zz
dxx yy zz
dxx yy zz
⎫
=− +− +−
⎪
⎪
⎪
=− +− +−
⎬
⎪
⎪
=− +− +−
⎪
⎭
(2)
BIODEVICES 2008 - International Conference on Biomedical Electronics and Devices
188

3 CONCLUSIONS
As result of this research, a low-cost and low-
complexity indoor positioning system has been
designed. It meets the requirements stated
previously, to fit in a motion tracking application.
The method of determining TOF has a good
precision for fixed distances (300 µm) and good
performance with high misalignment between
transducer pairs. Adding all sources of one-
dimensional distances’ inaccuracies (worst case
scenario), the error might reach 5 mm. This error
translated to three-dimensional positioning would
mean 8 mm.
Regarding the reliability of the system, with the
inclusion of the controlled emission, the system has
been able to create signals in reception with a
characteristic form. This effect brings about
advantages when dealing with reflection on surfaces,
important factor in an operating room. In addition,
the system will be more robust to external noises in
the work frequency. In terms of scalability, the
developed system is able to capture the data from up
to 20 receiving modules. Observing the obtained
results, we can conclude that the system performs in
a satisfactory way the motion tracking of the
instrument’s position and movement.
ACKNOWLEDGEMENTS
This work has been partially supported by the
Spanish Ministry of Science and Technology under
CICYT project numbers TIC2003-07766 and
TIN2006-15617-C03-02. Also by the EU under
project MonAmi (IST-5-0535147).
REFERENCES
Bianchi, G., 2007. Exploration of augmented reality
technology for surgical training simulators, Diss.,
Eidgenössische Technische Hochschule ETH Zürich,
Nr. 16876
Cai, C., Regtien, Paul P. L. , 1993. Accurate Digital Time
of flight Measurement Using Self-Interference, IEEE
Transactions on Instrumentation and Measurement
.Vol. 42, No.6, December 1993, Pag. 990-994
Casas, R., et al, 2006. Robust Estimator for Non-Line-of-
Sight Error Mitigation in Indoor Localization,
EURASIP Journal of Applied Signal Processing,
2006, Article ID 43429, pp. 1-8.
Casas, R., et al, 2007. Hidden Issues in Deploying an
Indoor Location System ,Pervasive Computing, IEEE,
Vol.6, Iss.2, April-June 2007 Pages:62-69
Huang. S.S et al, 2002. A high accuracy ultrasonic
distance measurement system using binary frequency
shift-keyed signal and phase detection. American
Institute of Physics, Review of Scientific Instruments,
Volume 73, Issue 10, pp. 3671-3677.
Lamancusa, John S., Figueroa, J.Fernando, 1990. Ranging
errors caused by angular misalignment between
ultrasonic transducer pairs, The Journal of the
Acoustical Society of America, Volume 87, Issue 3,
March 1990, pp.1327-1335
Liao et al, 2004. A new ultrasonic temperature
measurement system for air conditioners in
automobiles. Insttitute of Physics, Meas. Sci. Technol.
15 413-419
Tatar, F., 2006. Ultrasound 3D positioning system for
surgical instruments, Doctoral Dissertation,
Technische Universiteit Delf.
Figure 3: Motion tracking.
Figure 2: Mock up implementation.
ULTRASONIC MOTION TRACKING OF INSTRUMENTS IN OPERATING THEATRE
189
