AUTOMATIC FALL DETECTION AND ALERT SYSTEM
A Compact GPS/GSM Enabled Unit based on Accelerometry
Hugo Silva, Filipe Silva, Hugo Gamboa
PLUX – Biosensor Engineering, Av. 5 de Outubro nº 70 – 8º, Lisbon, Portugal
Vítor Viegas
EST – IPS, Setúbal, Portugal
Keywords: Healthcare, Quality of Life, Accelerometry, Biomechanics, Kinematics.
Abstract: Accidental falls are among one of the main causes of death and disability on elderly people. This stands
both as a healthcare problem, in the sense that, upon falling, if individuals are not assisted in an early stage
severe long term consequences may arise; and as a limitation for the individual’s daily life, in the sense that
they generally deprive themselves of regular routines as a preventive measure to avoid falling. In this paper
we describe a hardware unit conceived to automatically detect fall events, and trigger a set of alert actions
which allow the remote detection of the occurrence and facilitate rapid assistance.
1 INTRODUCTION
Population aging is nowadays growing to a
worldwide concern. In the U.S., projections for 2000
pointed a 14,3% population share for senior citizens
of 65+; projections indicate that this number will
grow by 2050 to an impressive 22,6% (U.S. Census
Bureau, 2004), disturbing the balance in the
population structure.
The leading cause of death by injuries, and one
of the main causes of disability in elderly citizens,
are accidental falls (CDC, 2006). Statistics show
that, in the U.S., more than one third of the senior
population with 65+ fall every year with dramatic
outcomes (Hausdorff et al, 2001; Hornbrook et al,
1994). Besides the increase in the number of deaths
resulting from involuntary falls (Stevens, 2006), fall-
related injuries usually have severe mid- and long-
term consequences (Jager et al, 2000; Bell et al,
2000).
Necessary financial and logistics resources to
provide for appropriate nursing services are highly
demanding on healthcare systems; in 2000 direct
medical costs resulting from fatal falls ascended to
$0.2 billion, and $19 billion for the non-fatal case
(Stevens et al., 2006). It is estimated that by 2020
the overall direct and indirect fall-related costs will
surpass $43 billion (Englander et al, 1996).
Furthermore, fall consequences diminish the
individual’s quality of life, standing in many cases
as a long-term limitation to a regular daily life. Fear
of falling leads, among others, to mobility reduction
and fitness degradation, further potentiating the risk
of involuntary falls (British Columbia Ministry of
Health Planning Office of the Provincial Health
Officer, 2004).
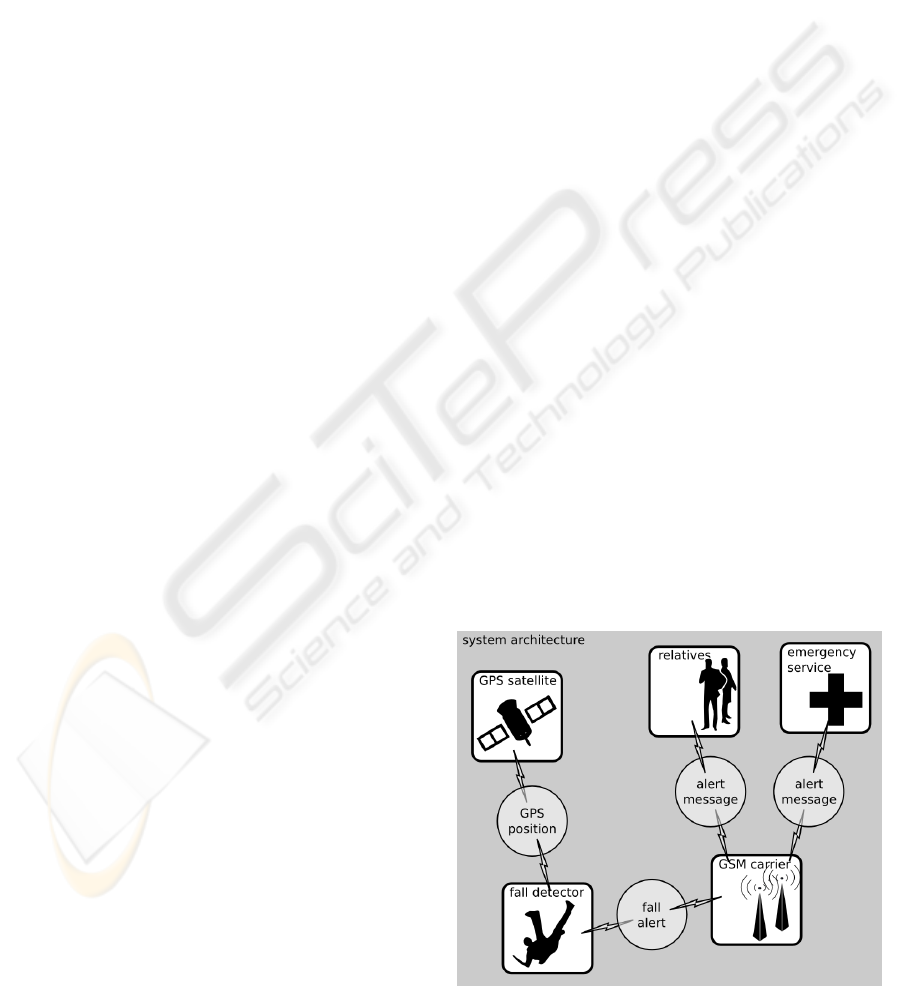
Figure 1: Fall detector system architecture.
186
Silva H., Silva F., Gamboa H. and Viegas V. (2008).
AUTOMATIC FALL DETECTION AND ALERT SYSTEM - A Compact GPS/GSM Enabled Unit based on Accelerometry.
In Proceedings of the First International Conference on Biomedical Electronics and Devices, pages 186-189
DOI: 10.5220/0001056401860189
Copyright
c
SciTePress

This is a trend in most developing countries, and
critical issues like the quality of life and healthcare
for senior citizens are rapidly arising, thus making
way for the development of novel, efficient and cost-
effective methods and technologies.
In this paper we present a GPS/GSM enabled
portable hardware unit, designed with the purpose of
automatically detecting involuntary fall events to
alert emergency or nursing teams upon fall detection
(Figure 1). The system facilitates rapid assistance
allowing remote detection of the occurrence, as well
as the GPS coordinates to track the user location.
2 HARDWARE
Recent advances in hardware design and integration
provide appropriate conditions for the development
of compact, miniaturized systems with a wide
application range in real-time signal acquisition and
processing (Silva et al, 2005).
For the fall detector hardware unit, three main
vectors guided the development process: (a)
automation; (b) autonomy; and (c) miniaturization.
With a small form factor, the unit was desgined to
be worn at waist level, measuring 5.2x5.2x1.6cm,
and weighting aproximately 55g.
Figure 2: Fall detector block diagram.
Figure 2 depicts the block diagram for the fall
detector hardware unit, in which there are three main
components which will be detailed next: (a)
accelerometry sensor; (b) MCU; and (c) GPS/GSM
module.
2.1 Accelerometry Sensor
Fall events can be detected using a number of
heuristics; we recur to accelerometry in order to
detect sudden changes in magnitude, and angular
position.
The fall detector hardware unit integrates one
ADXL330 ±3G MEMS
®
tri-axial accelerometer
which measures the acceleration in the cartesian tri-
dimensional coordinate space.
To maximize the unit’s autonomy, the system is
maintained in an idle mode, only being activated if
the accelerometer readings exceed a pre-defined
magnitude level.
A set of comparators establishes the threshold,
and a hardware interrupt is triggered in the MCU
whenever the threshold is superseded by one of the
axis, switching it to active mode. This works as a
pre-filter for the fall detection algorithm discarding
standard daily life actions as walking, trunk
rotations, among others.
2.2 Microcontroller Unit
An ATMEGA168-20PU MCU is used to command
the hardware unit, maintain runtime data, and
implement the alert and working logic. It has 16KB
program memory, one 16 bit and two 8 bit timers,
serial interface, a built-in 6 channel Analog-to-
Digital Converter (ADC), and two externally
triggered interrupts.
The MCU is kept in idle mode, switching to
active mode from time to time as established by the
watchdog mode previously described in Section 2.1.
Once activated by the accelerometer, the MCU is
switched to active mode starting the real-time
accelerometer output signal acquisition and
processing routine.
If the fall detection software algorithm identifies
a fall event, the MCU enters in alert mode, waking
up the GPS/GSM module to conduct the procedure
described in Section 3.2.
2.3 GPS/GSM Module
GPS/GSM services are assured by a low power,
small form factor, Telit GM862 module. It is
controlled via AT commands from the MCU through
the serial interface, and it has a built-in GPS receiver
and a fully functional GSM device.
Two antennas are necessary in order to guarantee
the Radio Frequency (RF) signal reception for each
function. For this hardware unit we used two low
power consumption, small footprint, PCB antennas,
AUTOMATIC FALL DETECTION AND ALERT SYSTEM - A Compact GPS/GSM Enabled Unit based on
Accelerometry
187
of 13.4x13.4x5.5mm and 42x16x1.6mm, for the
GPS and GSM components respectively.
2.4 Power
The unit is powered by a Li-Ion rechargeable battery
with 3.7V nominal tension, and 2000mAh nominal
current. Table 1 presents the mean power
consumption analysis for the hardware unit. From
Table 1, and taking into account the operating modes
of the unit, an estimated battery lifetime of 72h is
achievable.
The GPS/GSM module described in Section 2.3
has a built-in battery charger, and charge level
indicator. Since we are using a rechargeable battery,
the battery status and charger functions from the
GM862 are also used. Without introducing
additional circuitry we are able to charge the battery
on-board, and assess the battery level during the
watchdog mode previously described in Section 3.1.
Table 1: Fall detector mean power consumption.
Item Mode Consumption
(mA)
Accelerometry
Sensor
Active 0.32
MCU Idle 5.20
Active 9.70
GPS/GSM Idle 4.00
GPS Search 60
Antenna - 13
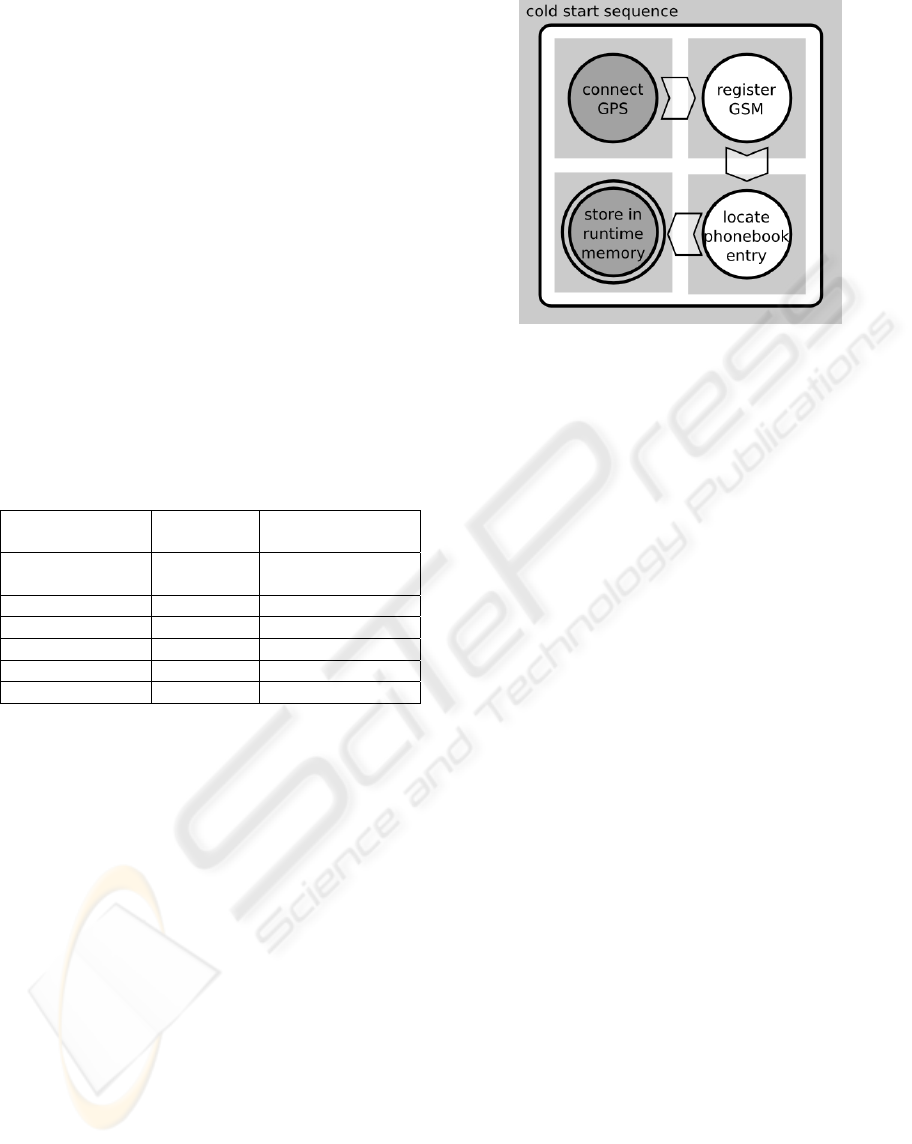
3 OPERATING MODES
When first connected from a complete power down
state, the hardware unit has a cold start time of <60s.
The Microcontroller Unit (MCU) starts in active
mode and performs the following initialization tasks
(Figure 3): (a) connect the GPS unit; (b) register the
GSM in the carrier network; (c) search the SIM card
memory for the predefined emergency phone
number that should be used while in alert mode; (d)
and store this number in the runtime memory.
During this sequence, a red led is used to
indicate that the unit is in start up mode. When the
initialization tasks are completed, the MCU puts the
GPS/GSM module into sleep mode.
While connected, the hardware unit has two
possible operating states: (a) watchdog mode; and
(b) alert mode. The watchdog mode is the state in
which the unit is normally working, while the alert
mode is the state in which the unit will enter upon
detection of a fall event.
Figure 3: Cold start state diagram.
3.1 Watchdog
This is the mode in which the unit operates until a
fall event is detected.
While in watchdog mode, every 4s the MCU
wakes up to signal the battery status; the activity
indicator led blinks with the colour varying
according to the battery charge level: (a) green,
>50%; (b) yellow, =50%; and (c) red, <50%.
Every 10m the MCU communicates with the
GPS/GSM module in order to update the battery
status and to determine the current GPS location of
the hardware unit. The last known GPS location is
stored in the runtime memory of the MCU.
3.2 Alert
If a potential fall detected by the pre-filter (described
ahead in Section 2.1), the MCU is activated entering
the alert mode.
In this stage the fall detection software algorithm
traces the input signal in order to check if it is a real
fall or a false alarm. If a false alarm is detected, the
unit goes back into watchdog mode. If it is validated
as a real fall, the MCU wakes up the GPS/GSM unit,
a text string is formed containing the date, time,
alarm notice, and last known GPS position, and sent
as a Short Message Service (SMS) text message to
the predefined emergency number loaded to the
runtime memory during the initialization tasks.
Upon failure in sending the alert SMS, the
hardware unit maintains the alert mode. If at first the
message is not sent, the process is retried for three
times. If the message fails sending in all consecutive
tries, the GPS/GSM module is restarted, and the
MCU initiates the alert message procedure once
more. This process is repeated until the hardware
BIODEVICES 2008 - International Conference on Biomedical Electronics and Devices
188

unit is disconnected or until the message is
successfully sent.
4 CONCLUSIONS
This paper describes the implementation of an
automatic fall detection hardware unit (Brown,
2005). Due to its compact size, it is easily worn, and
it does not limit the actions of its bearer.
With the integrated GPS/GSM feature, it allows
the remote detection of fall events and indicates the
last known GPS location of the unit’s bearer,
therefore facilitating the rapid intervention of family
members, emergency or nursing teams in case of fall
(Figure 1).
Most accidental falls occur in contexts in which
subjects are often alone and without means of
calling for aid upon falling; also, involuntary falls
have severe consequences, both in terms of
healthcare and quality of life. Portable fall detection
units are therefore a useful tool which play a major
role, in minimizing the adverse health consequences
of falls and in improving the confidence of fall
victims so that they do not deprive themselves of
their regular activities.
REFERENCES
Bell A., Talbot-Stern J., Hennessy A., 2000.
Characteristics and outcomes of older patients
presenting to the emergency department after a fall: a
retrospective analysis. Medical Journal of Australia;
173(4):176–7.
British Columbia Ministry of Health Planning Office of
the Provincial Health Officer, 2004. Prevention of falls
and injuries among the elderly: A special report from
the office of the provincial health officer. (online;
accessed 2007 Sep 10). Available from URL:
http://www.healthservices.gov.bc.ca/pho/special.html
Brown G., 2005. An accelerometer based fall detector:
Development, experimentation, and analysis.
University of California, Berkeley, SUPERB Technical
Report.
Centers for Disease Control and Prevention, National
Center for Injury Prevention and Control, 2006. Web-
based injury statistics query and reporting system
(WISQARS) (online; accessed 2007 Sep 10).
Available from URL: www.cdc.gov/ncipc/wisqars
Englander F, Hodson T., Terregrossa R., 1996. Economic
dimensions of slip and fall injuries. Journal of
Forensic Science; 41(5):733–46.
Hausdorff J., Rios D., Edelber H., 2001. Gait variability
and fall risk in community-living older adults: a 1-year
prospective study. Archives of Physical Medicine and
Rehabilitation 82(8):1050–6.
Hornbrook M., Stevens V., Wingfield D., Hollis J.,
Greenlick M., Ory M., 1994. Preventing falls among
community-dwelling older persons: results from a
randomized trial. The Gerontologist 34(1):16–23.
Jager T., Weiss H., Coben J., Pepe P., 2000. Traumatic
brain injuries evaluated in U.S. emergency
departments, 1992–1994. Academic Emergency
Medicine; 7(2): 134–40.
Silva H., Gamboa H., Viegas V., and Fred A., 2005.
Wireless physiologic data acquisition platform. In
Proceedings of the 2005 Conference on
Telecommunications.
Stevens J., 2006. Fatalities and injuries from falls among
older adults — United States, 1993–2003 and 2001–
2005. MMWR; 55(45).
Stevens J., Corso P., Finkelstein E., Miller T., 2006. The
costs of fatal and nonfatal falls among older adults.
Injury Prevention; 12:290–5.
U.S. Census Bureau, 2004. U.S. Web-based interim
projections by age, sex, race, and hispanic origin.
(online; accessed 2007 Sep 10). Available from URL:
http://www.census.gov/ipc/www/usinterimproj
AUTOMATIC FALL DETECTION AND ALERT SYSTEM - A Compact GPS/GSM Enabled Unit based on
Accelerometry
189
